invt FK1100 Moduł wykrywania enkodera przyrostowego dwukanałowego

Instrukcje użytkowania produktu
- Moduł detekcji dwukanałowego enkodera inkrementalnego FL6112 obsługuje kwadraturowy sygnał wejściowy A/B z objętością wejściowątage 24V.
- Obsługuje również tryby mnożenia częstotliwości x1/x2/x4. Każdy kanał ma cyfrowe wejście i wyjście sygnału z głośnościątage 24V.
- Należy upewnić się, że okablowanie jest prawidłowe, zgodnie ze specyfikacją podaną w instrukcji.
- Podłącz zewnętrzne źródło zasilania o parametrach 24 V i 0.5 A, aby zasilić moduł i podłączony enkoder.
- Należy zapewnić odpowiednią izolację i zabezpieczenie przed odwrotnym podłączeniem i przetężeniem.
- Moduł umożliwia pomiar prędkości i częstotliwości za pomocą podłączonych sygnałów enkodera.
- Zapewnij prawidłowe wykrywanie sygnałów enkodera A/B/Z, cyfrowych sygnałów wejściowych i cyfrowych sygnałów wyjściowych w celu dokładnego przetwarzania danych.
- Informacje na temat typowych ustawień parametrów, takich jak ustawienia licznika, tryby impulsów i poziomy elektryczne wykrywania DI, można znaleźć w instrukcji obsługi.
- Rozwiązywanie typowych problemów, takich jak problemy z podłączeniem zasilania lub nieprawidłowe ustawienia parametrów, odbywa się za pomocą kontrolek.
Często zadawane pytania
- Q: Jaka jest maksymalna częstotliwość wejściowa enkodera obsługiwana przez moduł FL6112?
- A: Moduł obsługuje maksymalną częstotliwość wejściową enkodera wynoszącą 200 kHz.
- Q: Jakiego typu sygnały enkodera obsługuje każdy kanał?
- A: Każdy kanał obsługuje kwadraturowy sygnał wejściowy A/B z głośnością wejściowątage 24V.
Przedmowa
Nadview
Dziękujemy za wybranie dwukanałowego modułu wykrywania inkrementalnego enkodera FL6112 firmy INVT. Dwukanałowy moduł wykrywania inkrementalnego enkodera FL6112 jest zgodny z modułami interfejsu komunikacyjnego serii FLEX firmy INVT (takimi jak FK1100, FK1200 i FK1300), programowalnym sterownikiem serii TS600 i programowalnym sterownikiem serii TM700. Dwukanałowy moduł wykrywania inkrementalnego enkodera FL6112 ma następujące cechy:
- Moduł obsługuje wejście enkodera przyrostowego dwóch kanałów.
- Każdy kanał enkodera obsługuje wejście enkodera przyrostowego A/B lub enkodera kierunku impulsu.
- Każdy kanał enkodera obsługuje kwadraturowy sygnał wejściowy A/B z głośnością wejściowątage 24 V, obsługuje typy źródła i odbiornika.
- Tryb enkodera przyrostowego obsługuje tryby mnożenia częstotliwości x1/x2/x4.
- Każdy kanał enkodera obsługuje 1 wejście sygnału cyfrowego z głośnością wejściowątage 24V.
- Każdy kanał enkodera obsługuje 1 wyjście sygnału cyfrowego o objętości wyjściowejtage 24V.
- Moduł zapewnia jedno wyjście zasilania 24 V dla enkodera, umożliwiające zasilanie podłączonego enkodera.
- Moduł obsługuje maksymalną częstotliwość wejściową enkodera wynoszącą 200 kHz.
- Moduł umożliwia pomiar prędkości i częstotliwości.
W tym przewodniku krótko opisano interfejs, okablowanie, np.amples, specyfikacje kabli, zastosowanie examppliki, typowe parametry, typowe błędy i rozwiązania modułu wykrywania dwukanałowego enkodera inkrementalnego INVT FL6112.
Publiczność
- Personel posiadający wiedzę zawodową w zakresie elektryki (np. wykwalifikowani inżynierowie elektrycy lub personel o równoważnej wiedzy).
Historia zmian
- Instrukcja może ulegać nieregularnym zmianom bez wcześniejszego powiadomienia ze względu na aktualizacje wersji produktu lub z innych powodów.
| NIE. | Zmiana opis | Wersja | Data wydania |
| 1 | Pierwsze wydanie. | V1.0 | Lipiec 2024 |
Specyfikacje
| Przedmiot | Specyfikacje | |||
|
Zasilacz |
Zewnętrzna znamionowa objętość wejściowatage | 24 V prądu stałego (-15% – +20%) | ||
| Prąd znamionowy wejściowy zewnętrzny | 0.5A | |||
| Magistrala tylna
znamionowa objętość wyjściowatage |
5 V prądu stałego (4.75 V prądu stałego–5.25 V prądu stałego) |
|||
| Prąd magistrali backplane
konsumpcja |
140mA (wartość typowa) |
|||
| Izolacja | Izolacja | |||
| Ochrona zasilania | Zabezpieczenie przed odwrotnym podłączeniem i przetężeniem | |||
|
Wskaźnik |
Nazwa | Kolor | Jedwab
ekran |
Definicja |
|
Wskaźnik uruchomienia |
Zielony |
R |
Wł.: Moduł działa. Powolne miganie (raz na 0.5 s): Moduł nawiązuje komunikację.
Wył.: Moduł nie jest zasilany włączone lub jest nieprawidłowe. |
|
|
Wskaźnik błędu |
Czerwony |
E |
Wył.: Podczas pracy modułu nie wykryto żadnych nieprawidłowości.
Szybkie miganie (raz na 0.1 s): Moduł jest offline. Powolne miganie (raz na 0.5 s): Brak podłączonego zasilania zewnętrznego lub nieprawidłowe ustawienia parametrów. |
|
| Wskaźnik kanału | Zielony | 0 | Włączanie enkodera kanału 0 | |
| 1 | Włączanie enkodera kanału 1 | |||
|
Wykrywanie sygnału enkodera A/B/Z |
Zielony |
A0 |
Wł.: Sygnał wejściowy jest prawidłowy. Wył.: Sygnał wejściowy jest nieprawidłowy. |
|
| B0 | ||||
| Z0 | ||||
| A1 | ||||
| B1 | ||||
| Z1 | ||||
| Przedmiot | Specyfikacje | |||
| Wejście cyfrowe
wykrywanie sygnału |
Zielony | X0 | Wł.: Sygnał wejściowy jest prawidłowy.
Wył.: Sygnał wejściowy jest nieprawidłowy. |
|
| X1 | ||||
| Wyjście cyfrowe
wskazanie sygnału |
Zielony | Y0 | Włącz: Włącz wyjście.
Wył.: Wyłącz wyjście. |
|
| Y1 | ||||
| Połączony
typ enkodera |
Enkoder inkrementalny | |||
| Liczba
kanały |
2 | |||
| Koder objtage | 24 V DC ± 15% | |||
| Zliczanie zasięgu | -2147483648 – 2147483647 | |||
| Tryb pulsacyjny | Różnica fazowa impulsu/impulsu+wejście kierunkowe (obsługuje
sygnały bezkierunkowe) |
|||
| Częstotliwość impulsów | 200kHz | |||
| Mnożenie częstotliwości
tryb |
x1/x2/x4 |
|||
| Rezolucja | 1–65535PPR (impulsów na obrót) | |||
| Ustawienie licznika | Wartością domyślną jest 0, co oznacza, że ustawienie wstępne jest wyłączone. | |||
| Impuls Z
kalibrowanie |
Obsługiwane domyślnie dla sygnału Z | |||
| Filtr licznika | (0–65535)*0.1 μs na kanał | |||
| Liczba DI | 2 | |||
| Wykrywanie DI
poziom elektryczny |
24 V prądu stałego | |||
| Krawędź DI
wybór |
Narastająca krawędź/Opadająca krawędź/Narastająca lub opadająca krawędź | |||
| Typ okablowania DI | Okablowanie typu źródło (PNP) / ujścia (NPN) | |||
| Czas filtra DI
ustawienie |
(0–65535)*0.1 μs na kanał | |||
| Wartość zatrzaśnięta | Całkowita liczba wartości zatrzaśniętych i flagi ukończenia zatrzaśnięcia | |||
| WŁ./WYŁ.
czas reakcji |
Na poziomie μs | |||
| kanał DO | 2 | |||
| Poziom wyjściowy DO | 24 V | |||
| Formularz wyjściowy DO | Okablowanie typu źródłowego, maks. prąd 0.16 A | |||
| Funkcja DO | Wyjście porównania | |||
| DO tomtage | 24 V prądu stałego | |||
| Pomiar | Częstotliwość/Prędkość | |||
| Przedmiot | Specyfikacje | |
| zmienny | ||
| Czas aktualizacji pomiaru
funkcjonować |
Cztery poziomy: 20 ms, 100 ms, 500 ms, 1000 ms |
|
| Funkcja bramkowania | Brama oprogramowania | |
| Orzecznictwo | CE, RoHS | |
|
Środowisko |
Stopień ochrony (IP)
ocena |
IP20 |
| Pracujący
temperatura |
-20°C–+55°C | |
| Wilgotność robocza | 10%–95% (bez kondensacji) | |
| Powietrze | Brak żrącego gazu | |
| Składowanie
temperatura |
-40°C–+70°C | |
| Wilgotność przechowywania | RH < 90%, bez kondensacji | |
| Wysokość | Poniżej 2000 m (80 kPa) | |
| Stopień zanieczyszczenia | ≤2, zgodny z normą IEC61131-2 | |
| Przeciwzakłóceniowy | Kabel zasilający 2kV zgodny z normą IEC61000-4-4 | |
| Klasa ESD | 6kVCD lub 8kVAD | |
| Kompatybilność elektromagnetyczna
poziom przeciwzakłóceniowy |
Strefa B, IEC61131-2 |
|
|
Odporny na wibracje |
IEC60068-2-6
5Hz–8.4Hz, wibracje ampwysokość 3.5 mm, 8.4 Hz–150 Hz, ACC 9.8 m/s2, 100 minut w każdym kierunku X, Y i Z (10 razy i po 10 minut za każdym razem, łącznie 100 minut) |
|
| Odporność na uderzenia |
Odporność na uderzenia |
IEC60068-2-27
50 m/s2, 11 ms, 3 razy dla każdej z 3 osi w każdym kierunku X, Y i Z |
| Instalacja
metoda |
Montaż na szynie: standardowa szyna DIN 35 mm | |
| Struktura | 12.5×95×105 (szer. × gł. × wys., jednostka: mm) | |
Opis interfejsu
| Schematyczny diagram | Sygnał lewy | Lewy terminal | Prawy terminal | Prawy sygnał |
 |
A0 | A0 | B0 | A1 |
| B0 | A1 | B1 | B1 | |
| Z0 | A2 | B2 | Z1 | |
| DI0 | A3 | B3 | DI1 | |
| SS | A4 | B4 | SS | |
| VO | A5 | B5 | KOM | |
| PE | A6 | B6 | PE | |
| DO0 | A7 | B7 | DO1 | |
| 24 V | A8 | B8 | 0V |
| Szpilka | Nazwa | Opis | Specyfikacje |
| A0 | A0 | Kanał 0 enkodera A-faza wejście | 1. Impedancja wewnętrzna: 3.3 kΩ
2. 12–30 V obj.tagDane wejściowe są dopuszczalne 3. Obsługuje wejście ujścia 4. Maks. częstotliwość wejściowa: 200 kHz |
| B0 | A1 | Kanał 1 enkodera A-faza wejście | |
| A1 | B0 | Kanał 0 enkodera B-faza wejście | |
| B1 | B1 | Kanał 1 enkodera B-faza wejście | |
| A2 | Z0 | Wejście fazy Z enkodera kanału 0 | |
| B2 | Z1 | Wejście fazy Z enkodera kanału 1 | |
| A3 | DI0 | Kanał 0 wejście cyfrowe | 1. Impedancja wewnętrzna: 5.4 kΩ
2. 12–30 V obj.tagDane wejściowe są dopuszczalne 3. Obsługuje wejście ujścia 4. Maksymalna częstotliwość wejściowa: 200 Hz |
| B3 | DI1 | Kanał 1 wejście cyfrowe | |
| A4 | SS | Wspólny port wejścia cyfrowego/enkodera | |
| B4 | SS | ||
| A5 | VO | Zewnętrzny zasilacz 24 V plus |
Moc wyjściowa: 24V±15% |
| B5 | KOM | Zewnętrzny zasilacz 24V ujemny | |
| A6 | PE | Podłoże o niskim poziomie hałasu | Punkty uziemienia modułu o niskim poziomie hałasu |
| B6 | PE | Podłoże o niskim poziomie hałasu | |
| A7 | DO0 | Wyjście cyfrowe kanału 0 | 1. Obsługuje wyjście źródłowe
2. Maksymalna częstotliwość wyjściowa: 500 Hz 3. Maksymalny prąd wytrzymywany pojedynczego kanału: < 0.16 A |
|
B7 |
DO1 |
Wyjście cyfrowe kanału 1 |
|
| A8 | +24 V | Moduł 24V wejście zasilania dodatnie | Wejście zasilania modułu: 24 V ± 10% |
| B8 | 0V | Moduł 24V wejście zasilania ujemne |
Okablowanie examples
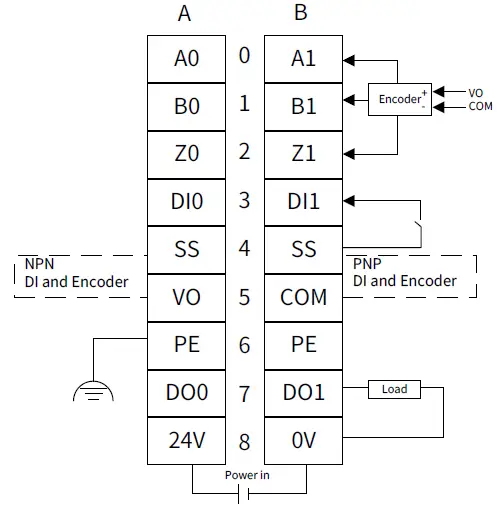
Notatka
- Jako kabli enkodera należy używać kabli ekranowanych.
- Zacisk PE musi być dobrze uziemiony za pomocą kabla.
- Nie należy wiązać kabla enkodera z przewodem zasilającym.
- Wejście enkodera i wejście cyfrowe współdzielą wspólny terminal SS.
- W przypadku stosowania modułów zasilających enkoder, w przypadku interfejsu wejściowego enkodera NPN należy zewrzeć SS i VO; w przypadku interfejsu wejściowego enkodera PNP należy zewrzeć SS z COM.
- W przypadku korzystania z zewnętrznego źródła zasilania do zasilania enkodera, w przypadku interfejsu wejściowego enkodera NPN, należy zewrzeć zacisk SS z biegunem dodatnim zewnętrznego źródła zasilania; w przypadku interfejsu wejściowego enkodera PNP, należy zewrzeć zacisk SS z biegunem ujemnym zewnętrznego źródła zasilania.
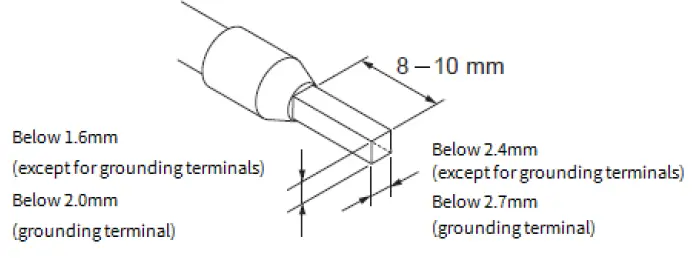
Specyfikacje kabli
| Materiał kablowy | Średnica kabla | Narzędzie do zaciskania | |
| mm2 | AWG | ||
|
Końcówka kablowa rurowa |
0.3 | 22 |
Użyj odpowiednich szczypiec zaciskowych. |
| 0.5 | 20 | ||
| 0.75 | 18 | ||
| 1.0 | 18 | ||
| 1.5 | 16 | ||
Notatka: Średnice przewodów rurowych w powyższej tabeli są podane wyłącznie w celach informacyjnych i mogą być dostosowywane w zależności od konkretnych sytuacji.
W przypadku stosowania innych końcówek kablowych rurowych, zaciskania wielu żył kabla, wymagania dotyczące rozmiaru obróbki są następujące:
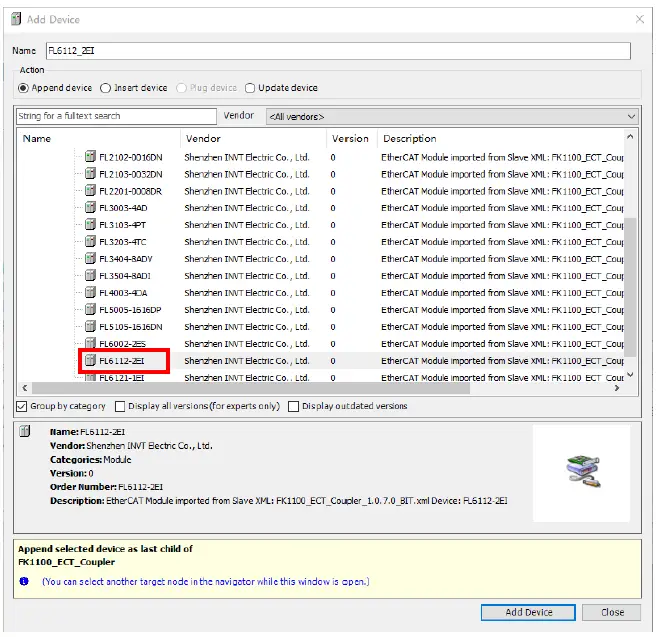
Aplikacja example
- W tym rozdziale CODESYS jest traktowany jakoample aby wprowadzić użycie produktu. Krok 1 Dodaj urządzenie FL6112_2EI.
- Krok 2 Wybierz parametry startowe, ustaw licznik, tryb filtrowania, rozdzielczość enkodera i wstępnie ustawione wartości licznika na podstawie rzeczywistych potrzeb, z jednostką filtra 0.1 μs.
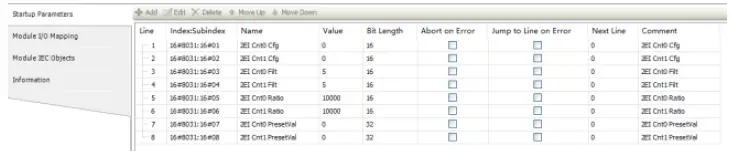
- Cntx Cfg(x=0,1) to parametr konfiguracji licznika typu UINT. Przyjmując konfigurację licznika 0 jako przykładample, definicję danych można znaleźć w opisie parametru.
| Fragment | Nazwa | Opis |
|
Bit1–bit0 |
Tryb kanału |
00: poczwórna częstotliwość fazy A/B; 01: podwójna częstotliwość fazy A/B
10: Częstotliwość znamionowa fazy A/B; 11: Impuls + kierunek |
|
Bit3–bit2 |
Okres pomiaru częstotliwości |
00: 20 ms; 01: 100 ms; 10: 500 ms; 11: 1000 ms |
| Bit5–bit4 | Włączanie zatrzasku krawędziowego | 00: Wyłączone; 01: Krawędź narastająca; 10: Krawędź opadająca; 11: Dwie krawędzie |
| Bit7–bit6 | Skryty | Skryty |
|
Bit9–bit8 |
Szerokość wyjścia impulsowego, gdy porównanie jest spójne |
00: 1 ms; 01: 2 ms; 10: 4 ms; 11: 8 ms |
|
Bit11–bit10 |
Tryb wyjścia porównania DO |
00: Wyjście, gdy porównanie jest spójne
01: Wyjście, gdy różnica między [dolnym limitem liczby, wartością porównawczą] 10: Wyjście, gdy różnica między [wartość porównawcza, górny limit liczby] 11: Zarezerwowane |
| Bit15–bit12 | Skryty | Skryty |
Zakładając, że licznik 0 skonfigurowano jako poczwórną częstotliwość fazy A/B, okres pomiaru częstotliwości wynosi 100 ms, włączono zatrzask narastającego zbocza DI0, a tryb ustawiono na wyjście impulsu 8 ms, gdy porównanie jest spójne, Cnt0 Cfg należy skonfigurować jako 788, tj. 2#0000001100010100, jak opisano poniżej.
| Bit15– bit12 | Bit11 | Bit10 | Bit9 | Bit8 | Bit7 | Bit6 | Bit5 | Bit4 | Bit3 | Bit2 | Bit1 | Bit0 |
| 0000 | 00 | 11 | 00 | 01 | 01 | 00 | ||||||
|
Skryty |
Dane wyjściowe, gdy porównanie jest spójne |
8 ms |
Skryty |
Rosnąca krawędź |
100 ms |
Częstotliwość poczwórna fazy A/B | ||||||
- Cntx Filt(x=0,1) to parametr filtru portu A/B/Z/DI o jednostce 0.1 μs. Jeśli jest ustawiony na 10, oznacza to, że tylko sygnały, które pozostają stabilne i nie skaczą w ciągu 1 μs, są sampdoprowadziło.
- Współczynnik Cntx (x=0,1) to rozdzielczość enkodera (liczba impulsów przekazywanych z jednego obrotu, tj. przyrost impulsu między dwoma impulsami Z). Zakładając, że rozdzielczość oznaczona na enkoderze wynosi 2500P/R, współczynnik Cnt0 powinien zostać ustawiony na 10000, ponieważ Cnt0 Cfg jest skonfigurowany jako poczwórna faza A/B.
- Cntx PresetVal(x=0,1) to ustawiona wartość licznika typu DINT.
- Krok 3 Po skonfigurowaniu powyższych parametrów startowych i pobraniu programu można sterować licznikiem na interfejsie mapowania wejścia/wyjścia modułu.
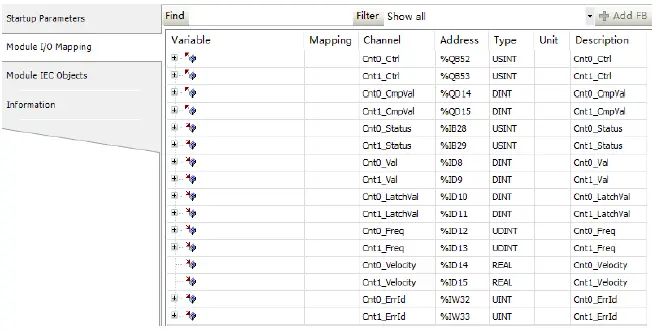
- Cntx_Ctrl(x=0,1) to parametr sterujący licznikiem. Przyjmując licznik 0 jako przykładample, definicję danych można znaleźć w opisie parametru.
| Fragment | Nazwa | Opis |
| Bit0 | Włącz liczenie | 0: Wyłącz 1: Włącz |
| Bit1 | Wyczyść wartość licznika | Skuteczny na narastającym zboczu |
| Bit2 | Zapisz wartość ustawioną licznika | Skuteczny na narastającym zboczu |
| Bit3 | Flaga przepełnienia licznika wyczyść | Skuteczny na narastającym zboczu |
| Bit4 | Porównanie kontrujące | 0: Wyłącz 1: Włącz |
| Bit7–bit5 | Skryty | Skryty |
- Cntx_CmpVal(x=0,1) to wartość porównania licznika typu DINT.
- Zakładając, że Cnt0_CmpVal jest ustawione na 1000000 i chcesz włączyć licznik do porównywania, ustaw Cnt0_Ctrl na 17, czyli 2#00010001. Szczegóły są następujące.
| Bit7–bit5 | Bit4 | Bit3 | Bit2 | Bit1 | Bit0 |
| 000 | 1 | 0 | 0 | 0 | 1 |
| Skryty | 1: Włącz | Skuteczny na narastającym zboczu | Skuteczny na narastającym zboczu | Skuteczny na narastającym zboczu | 1: Włącz |
Zgodnie z wartością konfiguracji 788 Cnt0 Cfg wymienioną powyżej (umożliwiającą DO wyprowadzenie impulsu o długości 8 ms, gdy porównanie jest spójne), gdy wartość licznika Cnt0_Val jest równa 1000000, DO0 wyprowadzi impuls o długości 8 ms.
Aby wyczyścić bieżącą wartość licznika 0, ustaw Cnt0_Ctrl na 2, czyli 2#00000010. Szczegóły podano poniżej.
| Bit7–bit5 | Bit4 | Bit3 | Bit2 | Bit1 | Bit0 |
| 000 | 0 | 0 | 0 | 1 | 0 |
| Skryty | 0: Wyłączone | Skuteczny na narastającym zboczu | Skuteczny na narastającym zboczu | Skuteczny na narastającym zboczu | 0: Wyłączone |
- W tym momencie bit1 Cnt0_Ctrl zmienia się z 0 na 1. Moduł FL6112_2EI monitoruje narastające zbocze tego bitu i zeruje wartość licznika 0, co oznacza, że Cnt0_Val zostaje wyczyszczony.
Załącznik A Opis parametrów
| Nazwa parametru | Typ | Opis |
| 2EI Cnt0 Konfiguracja | UINT | Parametr konfiguracji dla licznika 0: Bit1–bit0: Konfiguracja trybu kanału
00: poczwórna częstotliwość fazy A/B; 01: podwójna częstotliwość fazy A/B; 10: częstotliwość znamionowa fazy A/B; 11: impuls + kierunek (wysoki poziom, dodatni) Bit3–bit2: Okres pomiaru częstotliwości 00: 20 ms; 01: 100 ms; 10: 500 ms; 11: 1000 ms Bit5–bit4: Włączanie wartości liczby zatrzasków krawędziowych 00: Wyłączone; 01: Krawędź narastająca; 10: Krawędź opadająca; 11: Dwie krawędzie Bit7–bit6: Zarezerwowane Bit9–bit8: Szerokość wyjścia impulsowego, gdy porównanie jest spójne 00: 1 ms; 01: 2 ms; 10: 4 ms; 11: 8 ms Bit11–bit10: tryb wyjścia porównania DO 00: Wyjście, gdy porównanie jest spójne; 01: Wyjście pomiędzy [dolną granicą liczby, wartością porównania]; 10: Wyjście pomiędzy [wartość porównania, górny limit liczby]; 11: Zarezerwowane (Wyjście, gdy porównanie jest spójne) Bit15–bit12: Zarezerwowane |
| 2EI Cnt1 Konfiguracja | UINT | Parametr konfiguracji dla licznika 1. Konfiguracja parametru jest zgodna z licznikiem 0. |
| 2EI Cnt0 Filtr | UINT | Parametr filtrowania dla licznika 0 portu A/B/Z/DI. Zakres zastosowania 0–65535 (Jednostka: 0.1 μs) |
| 2EI Cnt1 Filtr | UINT | Parametr filtrowania dla licznika 1 portu A/B/Z/DI. Zakres zastosowania 0–65535 (Jednostka: 0.1 μs) |
| 2EI Współczynnik Cnt0 | UINT | Rozdzielczość enkodera dla licznika 0 (liczba impulsów zwrotnych z jednego obrotu, przyrost impulsu między dwoma impulsami Z). |
| 2EI Współczynnik Cnt1 | UINT | Rozdzielczość enkodera dla licznika 1 (liczba impulsów zwrotnych z jednego obrotu, przyrost impulsu między dwoma impulsami Z). |
| 2EI Cnt0 Wartość zadana | WGIĘCIE | Licznik 0 ma ustawioną wartość. |
| Nazwa parametru | Typ | Opis |
| 2EI Cnt1 Wartość zadana | WGIĘCIE | Licznik 1 ma ustawioną wartość. |
| Cnt0_Ctrl | USINT | Parametr sterujący licznikiem 0.
Bit0: Włącz zliczanie, ważne na wysokich poziomach Bit1: Wyczyść zliczanie, ważne na narastającym zboczu Bit2: Zapisz wartość ustawioną licznika, ważną przy narastającym zboczu Bit3: Wyczyść flagę przepełnienia zliczania, ważna na zboczu narastającym Bit4: Włącz funkcję porównywania zliczania, ważna na wysokich poziomach (pod warunkiem, że zliczanie jest włączone). Bit7–bit5: Zarezerwowane |
| Cnt1_Ctrl | USINT | Parametr sterujący licznikiem 1. Parametr
konfiguracja jest zgodna z licznikiem 0. |
| Wartość Cnt0_CmpVal | WGIĘCIE | Wartość porównania licznika 0 |
| Wartość Cnt1_CmpVal | WGIĘCIE | Wartość porównania licznika 1 |
| Cnt0_Status | USINT | Licznik 0, stan sprzężenia zwrotnego Bit0: Bit flagi przebiegu do przodu
Bit1: Bit flagi odwrotnego uruchomienia Bit2: Bit flagi przepełnienia Bit3: Bit flagi niedopełnienia Bit4: Flaga zakończenia zatrzasku DI0 Bit7–bit5: Zarezerwowane |
| Cnt1_Status | USINT | Licznik 1, stan sprzężenia zwrotnego Bit0: Bit flagi przebiegu do przodu
Bit1: Bit flagi odwrotnego uruchomienia Bit2: Bit flagi przepełnienia Bit3: Bit flagi niedopełnienia Bit4: Flaga zakończenia zatrzasku DI1 Bit7–bit5: Zarezerwowane |
| Wartość Cnt0 | WGIĘCIE | Wartość licznika 0 |
| Wartość Cnt1 | WGIĘCIE | Wartość licznika 1 |
| Wartość Cnt0_LatchVal | WGIĘCIE | Zablokowana wartość licznika 0 |
| Wartość Cnt1_LatchVal | WGIĘCIE | Zablokowana wartość licznika 1 |
| Częstotliwość Cnt0 | UDINT | Częstotliwość licznika 0 |
| Częstotliwość Cnt1 | UDINT | Częstotliwość licznika 1 |
| Cnt0_Prędkość | PRAWDZIWY | Prędkość licznika 0 |
| Cnt1_Prędkość | PRAWDZIWY | Prędkość licznika 1 |
| Identyfikator błędu Cnt0_ErrId | UINT | Kod błędu licznika 0 |
| Identyfikator błędu Cnt1_ErrId | UINT | Kod błędu licznika 1 |
Załącznik B Kod błędu
| Wada kod (dziesiętny) | Kod błędu (szesnastkowy) |
Wada typ |
Rozwiązanie |
|
1 |
0x0001 |
Błąd konfiguracji modułu |
Zapewnij prawidłowe mapowanie pomiędzy konfiguracją sieciową modułu i konfiguracją fizyczną. |
| 2 | 0x0002 | Nieprawidłowy moduł
ustawienia parametru |
Upewnij się, że parametr modułu
ustawienia są prawidłowe. |
| 3 | 0x0003 | Błąd zasilania portu wyjściowego modułu | Upewnij się, że zasilanie portu wyjściowego modułu jest prawidłowe. |
|
4 |
0x0004 |
Błąd wyjścia modułu |
Upewnij się, że moduł wyjściowy
obciążenie portu mieści się w określonym zakresie. |
|
18 |
0x0012 |
Nieprawidłowe ustawienie parametrów dla kanału 0 | Upewnij się, że ustawienia parametrów dla kanału 0 są prawidłowe.
prawidłowy. |
|
20 |
0x0014 |
Błąd wyjścia na kanale 0 |
Upewnij się, że wynik
w kanale 0 nie ma zwarcia ani przerwy. |
|
21 |
0x0015 |
Błąd obwodu otwartego źródła sygnału w kanale 0 | Upewnij się, że fizyczne połączenie źródła sygnału z kanałem
0 jest wartością normalną. |
|
22 |
0x0016 |
Samplimit sygnału ling
przekroczenie błędu na kanale 0 |
Upewnij się, że sampsygnał
na kanale 0 nie przekracza limitu chipów. |
|
23 |
0x0017 |
Samppomiar sygnału ling górny limit przekraczający usterkę
kanał 0 |
Upewnij się, że sampsygnał ling na kanale 0 nie przekracza górnej granicy pomiaru. |
|
24 |
0x0018 |
Samppomiar sygnału ling dolny limit przekraczający usterkę
kanał 0 |
Upewnij się, że sampsygnał ling na kanale 0 nie przekracza dolnej granicy pomiaru. |
|
34 |
0x0022 |
Nieprawidłowe ustawienie parametrów dla kanału 1 | Upewnij się, że parametr
ustawienia dla kanału 1 są prawidłowe. |
| Wada
kod (dziesiętny) |
Kod błędu (szesnastkowy) |
Wada typ |
Rozwiązanie |
|
36 |
0x0024 |
Błąd wyjścia na kanale 1 |
Sprawdź, czy na wyjściu kanału 1 nie ma zwarcia ani przerwy. |
|
37 |
0x0025 |
Błąd obwodu otwartego źródła sygnału w kanale 1 | Upewnij się, że fizyczne połączenie źródła sygnału kanału 1 jest normalne. |
|
38 |
0x0026 |
Sampprzekroczenie limitu sygnału Ling na kanale 1 | Upewnij się, że sampsygnał ling na kanale 1 nie przekracza limitu chipa. |
|
39 |
0x0027 |
Sampgórny limit pomiaru sygnału Ling przekracza błąd na kanale 1 | Upewnij się, że sampsygnał ling na kanale 1 nie przekracza górnej granicy pomiaru. |
|
40 |
0x0028 |
Samppomiar sygnału ling dolny limit przekracza błąd na kanale 1 | Upewnij się, że sampsygnał ling na kanale 1 nie przekracza dolnej granicy pomiaru. |
KONTAKT
Shenzhen INVT Electric Co., Ltd.
- Adres: INVT Guangming Technology Building, Songbai Road, Matian,
- Dystrykt Guangming, Shenzhen, Chiny
INVT Power Electronics (Suzhou) Co., Ltd.
- Adres: No. 1 Kunlun Mountain Road, Science & Technology Town,
- Dystrykt Gaoxin, Suzhou, Jiangsu, Chiny

Webstrona: www.invt.com
Informacje zawarte w instrukcji mogą ulec zmianie bez wcześniejszego powiadomienia.
Dokumenty / Zasoby
 |
invt FK1100 Moduł wykrywania enkodera przyrostowego dwukanałowego [plik PDF] Instrukcja użytkownika FK1100, FK1200, FK1300, TS600, TM700, FK1100 Moduł wykrywania dwukanałowego enkodera inkrementalnego, FK1100, Moduł wykrywania dwukanałowego enkodera inkrementalnego, Moduł wykrywania kanałowego enkodera inkrementalnego, Moduł wykrywania enkodera inkrementalnego, Moduł wykrywania, Moduł wykrywania, Moduł |