invt FK1100 Dual Channel Incremental Encoder Detection Module

ຄໍາແນະນໍາການນໍາໃຊ້ຜະລິດຕະພັນ
- ໂມດູນການກວດຫາຕົວເຂົ້າລະຫັດແບບເພີ່ມສອງຊ່ອງ FL6112 ຮອງຮັບການປ້ອນຂໍ້ມູນສັນຍານ A/B quadrature ທີ່ມີ vol input.tage ຂອງ 24V.
- ມັນຍັງສະຫນັບສະຫນູນຮູບແບບການຄູນຄວາມຖີ່ x1/x2/x4. ແຕ່ລະຊ່ອງມີການປ້ອນຂໍ້ມູນສັນຍານດິຈິຕອນແລະຜົນຜະລິດທີ່ມີ vol ໄດ້tage ຂອງ 24V.
- ຮັບປະກັນສາຍໄຟທີ່ຖືກຕ້ອງຕາມຂໍ້ສະເພາະຂອງສາຍໄຟທີ່ສະໜອງໃຫ້.
- ເຊື່ອມຕໍ່ການສະຫນອງພະລັງງານພາຍນອກທີ່ມີອັດຕາ 24V ແລະ 0.5A ເພື່ອພະລັງງານໂມດູນແລະຕົວເຂົ້າລະຫັດທີ່ເຊື່ອມຕໍ່.
- ຮັບປະກັນຄວາມໂດດດ່ຽວທີ່ຖືກຕ້ອງ ແລະປ້ອງກັນການເຊື່ອມຕໍ່ກັບກັນ ແລະກະແສໄຟຟ້າເກີນ.
- ໂມດູນສະຫນັບສະຫນູນການວັດແທກຄວາມໄວແລະຄວາມຖີ່ໂດຍໃຊ້ສັນຍານຕົວເຂົ້າລະຫັດທີ່ເຊື່ອມຕໍ່.
- ຮັບປະກັນການກວດຫາສັນຍານຕົວເຂົ້າລະຫັດ A/B/Z, ສັນຍານປ້ອນຂໍ້ມູນດິຈິຕອລ ແລະ ສັນຍານອອກດິຈິຕອນ ສຳລັບການປະມວນຜົນຂໍ້ມູນທີ່ຖືກຕ້ອງ.
- ອ້າງອີງໃສ່ຄູ່ມືສໍາລັບການຕັ້ງຄ່າພາລາມິເຕີທົ່ວໄປເຊັ່ນ: ໂຕນັບລ່ວງໜ້າ, ໂຫມດກໍາມະຈອນ, ແລະລະດັບໄຟຟ້າໃນການກວດສອບ DI.
- ແກ້ໄຂບັນຫາຄວາມຜິດປົກກະຕິເຊັ່ນ: ບັນຫາການເຊື່ອມຕໍ່ໄຟຟ້າ ຫຼືການຕັ້ງຄ່າພາລາມິເຕີທີ່ບໍ່ຖືກຕ້ອງໂດຍໃຊ້ໄຟຊີ້ບອກ.
FAQ
- Q: ຄວາມຖີ່ຂອງການປ້ອນຂໍ້ມູນຕົວເຂົ້າລະຫັດສູງສຸດທີ່ຮອງຮັບໂດຍໂມດູນ FL6112 ແມ່ນຫຍັງ?
- A: ໂມດູນຮອງຮັບຄວາມຖີ່ຂອງການປ້ອນຂໍ້ມູນຕົວເຂົ້າລະຫັດສູງສຸດ 200kHz.
- Q: ແຕ່ລະຊ່ອງຮອງຮັບສັນຍານຕົວເຂົ້າລະຫັດປະເພດໃດ?
- A: ແຕ່ລະຊ່ອງສະຫນັບສະຫນູນການປ້ອນສັນຍານ A/B quadrature ກັບ input voltage ຂອງ 24V.
ຄໍານໍາ
ເກີນview
ຂໍຂອບໃຈທ່ານສໍາລັບການເລືອກ INVT FL6112 ໂມດູນການກວດສອບການເຂົ້າລະຫັດສອງຊ່ອງເພີ່ມເຕີມ. ໂມດູນການກວດຫາຕົວເຂົ້າລະຫັດແບບເພີ່ມສອງຊ່ອງ FL6112 ແມ່ນເຂົ້າກັນໄດ້ກັບໂມດູນການໂຕ້ຕອບການສື່ສານຊຸດ INVT FLEX (ເຊັ່ນ: FK1100, FK1200, ແລະ FK1300), TS600 series programmable controller, ແລະ TM700 series programmable controller. ໂມດູນການກວດຫາຕົວເຂົ້າລະຫັດແບບເພີ່ມສອງຊ່ອງ FL6112 ມີຄຸນສົມບັດດັ່ງຕໍ່ໄປນີ້:
- ໂມດູນສະຫນັບສະຫນູນການປ້ອນຂໍ້ມູນເຂົ້າລະຫັດເພີ່ມຂຶ້ນຂອງສອງຊ່ອງ.
- ແຕ່ລະຊ່ອງເຂົ້າລະຫັດສະຫນັບສະຫນູນ A/B incremental encoder ຫຼື pulse direction encoder input.
- ແຕ່ລະຊ່ອງເຂົ້າລະຫັດຮອງຮັບການປ້ອນສັນຍານ A/B quadrature ດ້ວຍການປ້ອນຂໍ້ມູນ voltage ຂອງ 24V, ແລະສະຫນັບສະຫນູນປະເພດແຫຼ່ງແລະບ່ອນຫລົ້ມຈົມ.
- ໂໝດຕົວເຂົ້າລະຫັດແບບເພີ່ມຮອງຮັບໂໝດຄູນຄວາມຖີ່ x1/x2/x4.
- ແຕ່ລະຊ່ອງເຂົ້າລະຫັດສະຫນັບສະຫນູນ 1 ສັນຍານດິຈິຕອນທີ່ມີ input voltage ຂອງ 24V.
- ແຕ່ລະຊ່ອງເຂົ້າລະຫັດສະຫນັບສະຫນູນ 1 ສັນຍານດິຈິຕອນທີ່ມີຜົນຜະລິດ voltage ຂອງ 24V.
- ໂມດູນສະຫນອງການອອກພະລັງງານ 24V ຫນຶ່ງສໍາລັບຕົວເຂົ້າລະຫັດເພື່ອພະລັງງານກັບຕົວເຂົ້າລະຫັດທີ່ເຊື່ອມຕໍ່.
- ໂມດູນຮອງຮັບຄວາມຖີ່ຂອງການປ້ອນຂໍ້ມູນຕົວເຂົ້າລະຫັດສູງສຸດ 200kHz.
- ໂມດູນສະຫນັບສະຫນູນການວັດແທກຄວາມໄວແລະການວັດແທກຄວາມຖີ່.
ຄູ່ມືນີ້ອະທິບາຍສັ້ນໆກ່ຽວກັບການໂຕ້ຕອບ, ສາຍໄຟ examples, ຂໍ້ມູນຈໍາເພາະຂອງສາຍເຄເບີ້ນ, ການໃຊ້ examples, ຕົວກໍານົດການທົ່ວໄປ, ແລະຂໍ້ບົກພ່ອງທົ່ວໄປແລະການແກ້ໄຂຂອງໂມດູນການກວດຫາຕົວເຂົ້າລະຫັດສອງຊ່ອງ INVT FL6112.
ຜູ້ຊົມ
- ບຸກຄະລາກອນທີ່ມີຄວາມຮູ້ດ້ານວິຊາຊີບດ້ານໄຟຟ້າ (ເຊັ່ນ: ວິສະວະກອນໄຟຟ້າ ຫຼື ບຸກຄະລາກອນທີ່ມີຄວາມຮູ້ທຽບເທົ່າ).
ປະຫວັດການປ່ຽນແປງ
- ຄູ່ມືແມ່ນມີການປ່ຽນແປງທີ່ບໍ່ສະຫມໍ່າສະເຫມີໂດຍບໍ່ມີການແຈ້ງລ່ວງຫນ້າເນື່ອງຈາກການຍົກລະດັບຜະລິດຕະພັນຫຼືເຫດຜົນອື່ນໆ.
| ບໍ່. | ປ່ຽນແປງ ລາຍລະອຽດ | ຮຸ່ນ | ວັນທີປ່ອຍ |
| 1 | ປ່ອຍຄັ້ງທຳອິດ. | V1.0 | ກໍລະກົດ 2024 |
ຂໍ້ມູນຈໍາເພາະ
| ລາຍການ | ຂໍ້ມູນຈໍາເພາະ | |||
|
ການສະຫນອງພະລັງງານ |
ການປ້ອນຂໍ້ມູນຈາກພາຍນອກ voltage | 24VDC (-15% – +20%) | ||
| ການປ້ອນຂໍ້ມູນພາຍນອກໃຫ້ຄະແນນປັດຈຸບັນ | 0.5A | |||
| ລົດເມກັບຍົນ
ອັນດັບຜົນຜະລິດ voltage |
5VDC (4.75VDC–5.25VDC) |
|||
| ລົດເມ backplane ປັດຈຸບັນ
ການບໍລິໂພກ |
140mA (ຄ່າປົກກະຕິ) |
|||
| ການແຍກດ່ຽວ | ການແຍກດ່ຽວ | |||
| ການປ້ອງກັນການສະຫນອງພະລັງງານ | ການປ້ອງກັນການເຊື່ອມຕໍ່ຍ້ອນກັບແລະ overcurrent | |||
|
ຕົວຊີ້ວັດ |
ຊື່ | ສີ | ຜ້າໄຫມ
ຫນ້າຈໍ |
ຄໍານິຍາມ |
|
ແລ່ນຕົວຊີ້ວັດ |
ສີຂຽວ |
R |
ເປີດ: ໂມດູນກຳລັງແລ່ນຢູ່. ກະພິບຊ້າ (ທຸກໆ 0.5s): ໂມດູນກໍາລັງສ້າງການສື່ສານ.
ປິດ: ໂມດູນບໍ່ໄດ້ເປີດ ກ່ຽວກັບຫຼືມັນຜິດປົກກະຕິ. |
|
|
ຕົວຊີ້ວັດຄວາມຜິດພາດ |
ສີແດງ |
E |
ປິດ: ບໍ່ພົບຄວາມຜິດປົກກະຕິໃນລະຫວ່າງການປະຕິບັດງານຂອງໂມດູນ.
ກະພິບໄວ (ທຸກໆ 0.1s): ໂມດູນແມ່ນອອຟໄລ. ກະພິບຊ້າ (ທຸກໆ 0.5s): ບໍ່ມີໄຟເຊື່ອມຕໍ່ພາຍນອກ ຫຼື ການຕັ້ງຄ່າພາລາມິເຕີບໍ່ຖືກຕ້ອງ. |
|
| ຕົວຊີ້ວັດຊ່ອງ | ສີຂຽວ | 0 | ເປີດໃຊ້ຕົວເຂົ້າລະຫັດຊ່ອງ 0 | |
| 1 | ເປີດໃຊ້ຕົວເຂົ້າລະຫັດຊ່ອງ 1 | |||
|
ການກວດຫາສັນຍານຕົວເຂົ້າລະຫັດ A/B/Z |
ສີຂຽວ |
A0 |
ເປີດ: ສັນຍານປ້ອນຂໍ້ມູນຖືກຕ້ອງ. ປິດ: ສັນຍານປ້ອນຂໍ້ມູນບໍ່ຖືກຕ້ອງ. |
|
| B0 | ||||
| Z0 | ||||
| A1 | ||||
| B1 | ||||
| Z1 | ||||
| ລາຍການ | ຂໍ້ມູນຈໍາເພາະ | |||
| ການປ້ອນດິຈິຕອລ
ການກວດສອບສັນຍານ |
ສີຂຽວ | X0 | ເປີດ: ສັນຍານປ້ອນຂໍ້ມູນຖືກຕ້ອງ.
ປິດ: ສັນຍານປ້ອນຂໍ້ມູນບໍ່ຖືກຕ້ອງ. |
|
| X1 | ||||
| ຜົນຜະລິດດິຈິຕອນ
ຕົວຊີ້ບອກສັນຍານ |
ສີຂຽວ | Y0 | ເປີດ: ເປີດໃຊ້ຜົນຜະລິດ.
ປິດ: ປິດການນຳໃຊ້ຜົນຜະລິດ. |
|
| Y1 | ||||
| ເຊື່ອມຕໍ່
ປະເພດຕົວເຂົ້າລະຫັດ |
ຕົວເຂົ້າລະຫັດແບບເພີ່ມ | |||
| ຈໍານວນ
ຊ່ອງ |
2 | |||
| ເຂົ້າລະຫັດ voltage | 24VDC ± 15% | |||
| ຊ່ວງການນັບ | -2147483648–2147483647 | |||
| ໂໝດກຳມະຈອນ | ຄວາມແຕກຕ່າງຂອງໄລຍະກໍາມະຈອນ / pulse + ທິດທາງການປ້ອນຂໍ້ມູນ (ສະຫນັບສະຫນູນ
ສັນຍານທີ່ບໍ່ມີທິດທາງ) |
|||
| ຄວາມຖີ່ຂອງ ກຳ ມະຈອນ | 200kHz | |||
| ການຄູນຄວາມຖີ່
ໂໝດ |
x1/x2/x4 |
|||
| ຄວາມລະອຽດ | 1–65535PPR (ກຳມະຈອນຕໍ່ການປະຕິວັດ) | |||
| Counter preset | ຄ່າເລີ່ມຕົ້ນແມ່ນ 0, ຊຶ່ງຫມາຍຄວາມວ່າ preset ໄດ້ຖືກປິດໃຊ້ງານ. | |||
| Z-ກຳມະຈອນ
ການປັບທຽບ |
ສະຫນັບສະຫນູນໂດຍຄ່າເລີ່ມຕົ້ນສໍາລັບສັນຍານ Z | |||
| ຕົວກອງ | (0–65535)*0.1μs ຕໍ່ຊ່ອງ | |||
| ຈໍານວນ DIs | 2 | |||
| ການກວດຫາ DI
ລະດັບໄຟຟ້າ |
24VDC | |||
| ຂອບ DI
ການຄັດເລືອກ |
ຂອບເພີ່ມຂຶ້ນ / ແຂບຫຼຸດ / ເພີ່ມຂຶ້ນຫຼືແຂບຫຼຸດລົງ | |||
| ປະເພດສາຍໄຟ DI | ແຫຼ່ງ (PNP)-type /Sink (NPN)-ປະເພດສາຍໄຟ | |||
| ເວລາການກັ່ນຕອງ DI
ການຕັ້ງຄ່າ |
(0–65535)*0.1μs ຕໍ່ຊ່ອງ | |||
| ມູນຄ່າ latched | ມູນຄ່າການສັອດທັງໝົດ ແລະທຸງການສໍາເລັດຮູບຂອງສະຕິກ | |||
| ເປີດ/ປິດ
ເວລາຕອບສະຫນອງ |
ຢູ່ໃນລະດັບμs | |||
| DO ຊ່ອງ | 2 | |||
| DO ລະດັບຜົນຜະລິດ | 24V | |||
| DO ຮູບແບບຜົນຜະລິດ | ສາຍໄຟປະເພດແຫຼ່ງ, ສູງສຸດທີ່ເຄຍ. ປັດຈຸບັນ 0.16A | |||
| ປະຕິບັດຫນ້າທີ່ | ຜົນຜະລິດປຽບທຽບ | |||
| DO voltage | 24VDC | |||
| ການວັດແທກ | ຄວາມຖີ່/ຄວາມໄວ | |||
| ລາຍການ | ຂໍ້ມູນຈໍາເພາະ | |
| ຕົວແປ | ||
| ເວລາປັບປຸງການວັດແທກ
ຫນ້າທີ່ |
ສີ່ລະດັບ: 20ms, 100ms, 500ms, 1000ms |
|
| ການທໍາງານຂອງປະຕູຮົ້ວ | ປະຕູຊອບແວ | |
| ການຢັ້ງຢືນ | CE, RoHS | |
|
ສະພາບແວດລ້ອມ |
ການປົກປ້ອງຂາເຂົ້າ (IP)
ຄະແນນ |
IP20 |
| ເຮັດວຽກ
ອຸນຫະພູມ |
-20°C–+55°C | |
| ຄວາມຊຸ່ມຊື່ນເຮັດວຽກ | 10%–95% (ບໍ່ມີການຂົ້ນ) | |
| ອາກາດ | ບໍ່ມີອາຍແກັສ corrosive | |
| ການເກັບຮັກສາ
ອຸນຫະພູມ |
-40°C–+70°C | |
| ຄວາມຊຸ່ມຊື້ນ | RH < 90%, ໂດຍບໍ່ມີການ condensation | |
| ລະດັບຄວາມສູງ | ຕ່ຳກວ່າ 2000m (80kPa) | |
| ລະດັບມົນລະພິດ | ≤2, ສອດຄ່ອງກັບ IEC61131-2 | |
| ຕ້ານການແຊກແຊງ | ສາຍໄຟ 2kV, ສອດຄ່ອງກັບ IEC61000-4-4 | |
| ຫ້ອງຮຽນ ESD | 6kVCD ຫຼື 8kVAD | |
| EMC
ລະດັບຕ້ານການແຊກແຊງ |
ເຂດ B, IEC61131-2 |
|
|
ທົນທານຕໍ່ການສັ່ນສະເທືອນ |
IEC60068-2-6
5Hz–8.4Hz, ການສັ່ນສະເທືອນ amplitude ຂອງ 3.5mm, 8.4Hz–150Hz, ACC ຂອງ 9.8m/s2, 100 ນາທີໃນແຕ່ລະທິດທາງຂອງ X, Y, ແລະ Z (10 ເທື່ອແລະ 10 ນາທີແຕ່ລະຄັ້ງ, ສໍາລັບທັງຫມົດ 100 ນາທີ) |
|
| ຄວາມຕ້ານທານຜົນກະທົບ |
ຄວາມຕ້ານທານຜົນກະທົບ |
IEC60068-2-27
50m/s2, 11ms, 3 ເທື່ອສໍາລັບແຕ່ລະ 3 ແກນຢູ່ແຕ່ລະທິດທາງຂອງ X, Y, ແລະ Z |
| ການຕິດຕັ້ງ
ວິທີການ |
ການຕິດຕັ້ງລົດໄຟ: 35mm ມາດຕະຖານ DIN rail | |
| ໂຄງສ້າງ | 12.5×95×105 (W×D×H, ຫນ່ວຍບໍລິການ: mm) | |
ລາຍລະອຽດໃນການໂຕ້ຕອບ
| ແຜນວາດແຜນພາບ | ສັນຍານຊ້າຍ | ຊ້າຍ ສະຖານີ | terminal ສິດ | ສັນຍານທີ່ຖືກຕ້ອງ |
 |
A0 | A0 | B0 | A1 |
| B0 | A1 | B1 | B1 | |
| Z0 | A2 | B2 | Z1 | |
| DI0 | A3 | B3 | DI1 | |
| SS | A4 | B4 | SS | |
| VO | A5 | B5 | COM | |
| PE | A6 | B6 | PE | |
| DO0 | A7 | B7 | DO1 | |
| 24V | A8 | B8 | 0V |
| ປັກໝຸດ | ຊື່ | ລາຍລະອຽດ | ຂໍ້ມູນຈໍາເພາະ |
| A0 | A0 | ຕົວເຂົ້າລະຫັດຊ່ອງ 0 ໄລຍະ A | 1. impedance ພາຍໃນ: 3.3kΩ
2. 12–30V voltage input ແມ່ນຍອມຮັບໄດ້ 3. ຮອງຮັບການປ້ອນຂໍ້ມູນ sink 4. ສູງສຸດ. ຄວາມຖີ່ຂອງການປ້ອນຂໍ້ມູນ: 200kHz |
| B0 | A1 | ຕົວເຂົ້າລະຫັດຊ່ອງ 1 ໄລຍະ A | |
| A1 | B0 | ຕົວເຂົ້າລະຫັດຊ່ອງ 0 B-phase input | |
| B1 | B1 | ຕົວເຂົ້າລະຫັດຊ່ອງ 1 B-phase input | |
| A2 | Z0 | ຊ່ອງ 0 ຕົວເຂົ້າລະຫັດ Z-phase input | |
| B2 | Z1 | ຊ່ອງ 1 ຕົວເຂົ້າລະຫັດ Z-phase input | |
| A3 | DI0 | ຊ່ອງ 0 ການປ້ອນຂໍ້ມູນດິຈິຕອນ | 1. impedance ພາຍໃນ: 5.4kΩ
2. 12–30V voltage input ແມ່ນຍອມຮັບໄດ້ 3. ຮອງຮັບການປ້ອນຂໍ້ມູນ sink 4. ສູງສຸດ. ຄວາມຖີ່ຂອງການປ້ອນຂໍ້ມູນ: 200Hz |
| B3 | DI1 | ຊ່ອງ 1 ການປ້ອນຂໍ້ມູນດິຈິຕອນ | |
| A4 | SS | ການປ້ອນຂໍ້ມູນດິຈິຕອນ/ຕົວເຂົ້າລະຫັດພອດທົ່ວໄປ | |
| B4 | SS | ||
| A5 | VO | ການສະຫນອງພະລັງງານ 24V ພາຍນອກບວກ |
ຜົນຜະລິດພະລັງງານ: 24V ± 15% |
| B5 | COM | ການສະຫນອງພະລັງງານ 24V ພາຍນອກລົບ | |
| A6 | PE | ພື້ນທີ່ສຽງຕ່ໍາ | ຈຸດພື້ນຖານຂອງສຽງລົບກວນຕໍ່າສໍາລັບໂມດູນ |
| B6 | PE | ພື້ນທີ່ສຽງຕ່ໍາ | |
| A7 | DO0 | ຊ່ອງ 0 ຜົນຜະລິດດິຈິຕອນ | 1. ຮອງຮັບຜົນຜະລິດແຫຼ່ງ
2. ສູງສຸດ. ຄວາມຖີ່ຂອງຜົນຜະລິດ: 500Hz 3. ສູງສຸດ. ທົນທານຕໍ່ກະແສຂອງຊ່ອງດຽວ: < 0.16A |
|
B7 |
DO1 |
ຊ່ອງ 1 ຜົນຜະລິດດິຈິຕອນ |
|
| A8 | +24V | ໂມດູນການປ້ອນຂໍ້ມູນພະລັງງານ 24V ໃນທາງບວກ | ການປ້ອນຂໍ້ມູນພະລັງງານໂມດູນ: 24V ± 10% |
| B8 | 0V | ໂມດູນ 24V ພະລັງງານ input ລົບ |
ສາຍໄຟ examples
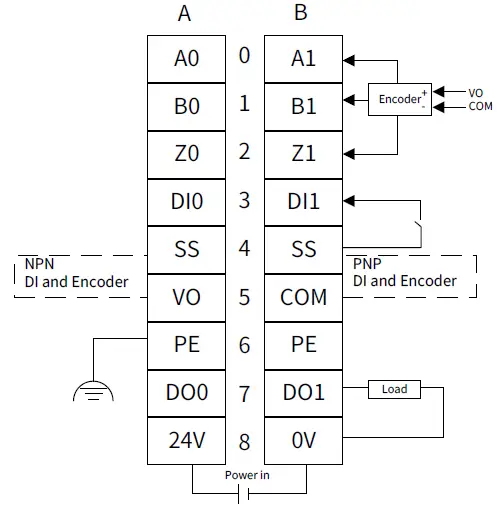
ໝາຍເຫດ
- ຄວນໃຊ້ສາຍເຄເບິ້ນທີ່ປ້ອງກັນໄວ້ເປັນສາຍເຂົ້າລະຫັດ.
- terminal PE ຕ້ອງໄດ້ຮັບການຮາກຖານດີໂດຍຜ່ານສາຍເຄເບີນ.
- ຢ່າມັດສາຍເຂົ້າລະຫັດກັບສາຍໄຟ.
- ການປ້ອນຂໍ້ມູນຕົວເຂົ້າລະຫັດ ແລະການປ້ອນຂໍ້ມູນແບບດິຈິຕອລແບ່ງປັນເປັນ SS terminal ທົ່ວໄປ.
- ເມື່ອໃຊ້ໂມດູນເພື່ອພະລັງງານຕົວເຂົ້າລະຫັດ, ສໍາລັບການໂຕ້ຕອບການປ້ອນຂໍ້ມູນເຂົ້າລະຫັດ NPN, ວົງຈອນສັ້ນ SS ແລະ VO; ສໍາລັບການໂຕ້ຕອບການປ້ອນຂໍ້ມູນເຂົ້າລະຫັດ PNP, ວົງຈອນສັ້ນ SS ກັບ COM.
- ໃນເວລາທີ່ການນໍາໃຊ້ການສະຫນອງພະລັງງານພາຍນອກເພື່ອພະລັງງານການເຂົ້າລະຫັດ, ສໍາລັບການໂຕ້ຕອບການປ້ອນຂໍ້ມູນເຂົ້າລະຫັດ NPN, ວົງຈອນສັ້ນ SS ແລະ pole ບວກຂອງການສະຫນອງພະລັງງານພາຍນອກ; ສໍາລັບການໂຕ້ຕອບການປ້ອນຂໍ້ມູນເຂົ້າລະຫັດ PNP, ວົງຈອນສັ້ນ SS ກັບຂົ້ວລົບຂອງການສະຫນອງພະລັງງານພາຍນອກ.
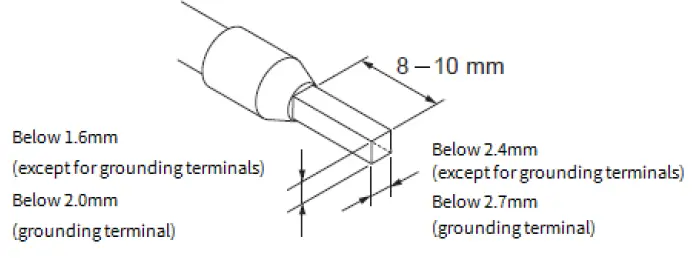
ຂໍ້ມູນຈໍາເພາະຂອງສາຍ
| ວັດສະດຸສາຍ | ເສັ້ນຜ່າສູນກາງສາຍ | ເຄື່ອງມື crimping | |
| mm2 | AWG | ||
|
ສາຍເຄເບີ້ນ tubular |
0.3 | 22 |
ໃຊ້ plier crimping ທີ່ເຫມາະສົມ. |
| 0.5 | 20 | ||
| 0.75 | 18 | ||
| 1.0 | 18 | ||
| 1.5 | 16 | ||
ໝາຍເຫດ: ເສັ້ນຜ່າສູນກາງຂອງສາຍໄຟຂອງສາຍທໍ່ tubular ໃນຕາຕະລາງກ່ອນຫນ້າແມ່ນພຽງແຕ່ສໍາລັບການອ້າງອີງ, ເຊິ່ງສາມາດປັບໄດ້ໂດຍອີງໃສ່ສະຖານະການຕົວຈິງ.
ເມື່ອນໍາໃຊ້ສາຍເຄເບີນທໍ່ອື່ນໆ, ບີບສາຍຫຼາຍສາຍ, ແລະຄວາມຕ້ອງການຂະຫນາດການປຸງແຕ່ງແມ່ນດັ່ງຕໍ່ໄປນີ້:
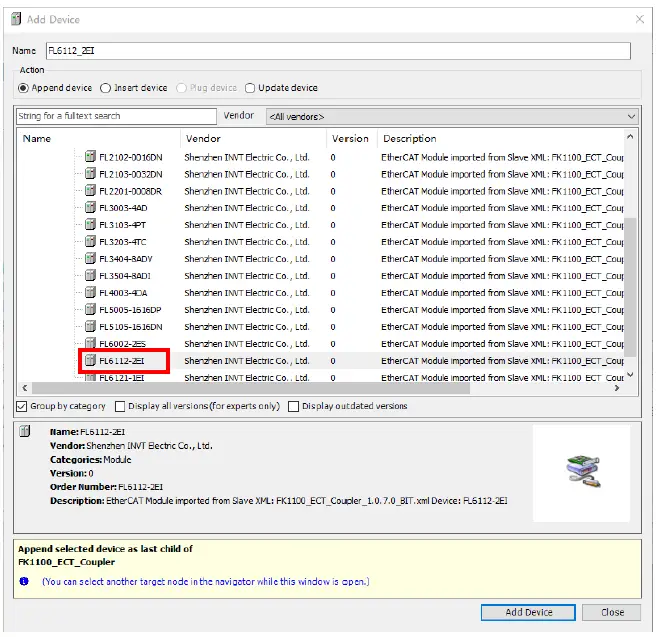
ຄໍາຮ້ອງສະຫມັກ example
- ບົດນີ້ໃຊ້ CODESYS ເປັນ example ເພື່ອແນະນໍາການນໍາໃຊ້ຜະລິດຕະພັນ. ຂັ້ນຕອນທີ 1 ເພີ່ມອຸປະກອນ FL6112_2EI.
- ຂັ້ນຕອນທີ 2 ເລືອກຕົວກໍານົດການເລີ່ມຕົ້ນ, ກໍານົດຕົວຕ້ານການ, ຮູບແບບການກັ່ນຕອງ, ຄວາມລະອຽດຂອງຕົວເຂົ້າລະຫັດ, ແລະຄ່າ counter preset ໂດຍອີງໃສ່ຄວາມຕ້ອງການຕົວຈິງ, ມີຫນ່ວຍການກັ່ນຕອງຂອງ 0.1μs.
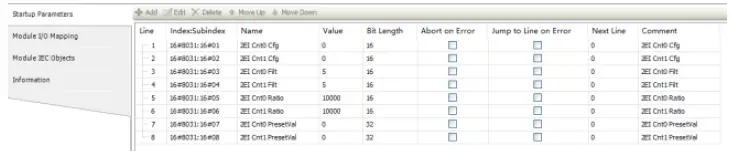
- Cntx Cfg(x=0,1) ແມ່ນຕົວກໍານົດການກຳນົດຄ່າໂຕແທນຂອງປະເພດ UINT. ເອົາການຕັ້ງຄ່າ counter 0 ເປັນ exampດັ່ງນັ້ນ, ຄໍານິຍາມຂໍ້ມູນສາມາດພົບໄດ້ໃນຄໍາອະທິບາຍພາລາມິເຕີ.
| ບິດ | ຊື່ | ລາຍລະອຽດ |
|
Bit1–bit0 |
ໂmodeດຊ່ອງ |
00: A/B ໄລຍະ quadruple ຄວາມຖີ່; 01: ໄລຍະ A/B ຄວາມຖີ່ສອງເທົ່າ
10:ໄລຍະ A/B ລະດັບຄວາມຖີ່; 11: Pulse+direction |
|
Bit3–bit2 |
ໄລຍະເວລາການວັດແທກຄວາມຖີ່ |
00: 20ms; 01: 100ms; 10: 500ms; 11: 1000ms |
| Bit5–bit4 | ການເປີດໃຊ້ງານສະລັກຂອບ | 00: ຄົນພິການ; 01: ແຂບຂຶ້ນ; 10: ແຂບຕົກ; 11: ສອງແຄມ |
| Bit7–bit6 | ສະຫງວນໄວ້ | ສະຫງວນໄວ້ |
|
Bit9–bit8 |
Pulse output width ເມື່ອການປຽບທຽບແມ່ນສອດຄ່ອງ |
00: 1ms; 01: 2ms; 10: 4ms; 11: 8ms |
|
Bit11–bit10 |
ເຮັດຮູບແບບຜົນຜະລິດການປຽບທຽບ |
00: ຜົນຜະລິດໃນເວລາທີ່ການປຽບທຽບແມ່ນສອດຄ່ອງ
01: ຜົນຜະລິດເມື່ອຄວາມແຕກຕ່າງລະຫວ່າງ [ຂີດຈໍາກັດຕ່ໍາກວ່າ, ມູນຄ່າການປຽບທຽບ] 10: ຜົນຜະລິດໃນເວລາທີ່ຄວາມແຕກຕ່າງລະຫວ່າງ [ມູນຄ່າການປຽບທຽບ, ຂອບເຂດຈໍາກັດເທິງຂອງຈໍານວນ] 11: ສະຫງວນໄວ້ |
| Bit15–bit12 | ສະຫງວນໄວ້ | ສະຫງວນໄວ້ |
ສົມມຸດວ່າຕົວນັບ 0 ຖືກຕັ້ງຄ່າເປັນຄວາມຖີ່ຂອງໄລຍະ A/B, ໄລຍະເວລາການວັດແທກຄວາມຖີ່ແມ່ນ 100ms, DI0 ເພີ່ມຂຶ້ນຂອງສະລັກແຂບຖືກເປີດໃຊ້ງານ, ແລະຮູບແບບຖືກຕັ້ງໃຫ້ອອກ 8ms pulse ເມື່ອການປຽບທຽບແມ່ນສອດຄ່ອງ, Cnt0 Cfg ຄວນຖືກຕັ້ງຄ່າເປັນ 788. , ie 2#0000001100010100, as ລາຍລະອຽດຂ້າງລຸ່ມນີ້.
| Bit15– bit12 | Bit11 | Bit10 | Bit9 | Bit8 | Bit7 | Bit6 | Bit5 | Bit4 | Bit3 | Bit2 | Bit1 | Bit0 |
| 0000 | 00 | 11 | 00 | 01 | 01 | 00 | ||||||
|
ສະຫງວນໄວ້ |
ຜົນໄດ້ຮັບເມື່ອການປຽບທຽບແມ່ນສອດຄ່ອງ |
8ms |
ສະຫງວນໄວ້ |
ຂອບເພີ່ມຂຶ້ນ |
100ms |
ຄວາມຖີ່ຂອງໄລຍະ A/B quadruple | ||||||
- Cntx Filt(x=0,1) ແມ່ນຕົວກໍານົດການກັ່ນຕອງຂອງພອດ A/B/Z/DI ທີ່ມີຫົວໜ່ວຍຂອງ 0.1μs. ຖ້າມັນຖືກຕັ້ງເປັນ 10, ມັນຫມາຍຄວາມວ່າພຽງແຕ່ສັນຍານທີ່ຄົງທີ່ແລະບໍ່ກະໂດດພາຍໃນ1μsແມ່ນ s.ampນຳ ພາ.
- ອັດຕາສ່ວນ Cntx(x=0,1) ແມ່ນຄວາມລະອຽດຂອງຕົວເຂົ້າລະຫັດ (ຈໍານວນຂອງ pulses ປ້ອນຄືນມາຈາກການປະຕິວັດຫນຶ່ງ, ie ການເພີ່ມຂຶ້ນຂອງກໍາມະຈອນລະຫວ່າງສອງ Z pulses). ສົມມຸດວ່າຄວາມລະອຽດທີ່ຕິດສະຫຼາກຢູ່ໃນຕົວເຂົ້າລະຫັດແມ່ນ 2500P/R, ອັດຕາສ່ວນ Cnt0 ຄວນຖືກຕັ້ງເປັນ 10000 ເນື່ອງຈາກ Cnt0 Cfg ຖືກຕັ້ງຄ່າເປັນສີ່ໄລຍະ A/B.
- Cntx PresetVal(x=0,1) ແມ່ນຄ່າ counter preset ຂອງປະເພດ DINT.
- ຂັ້ນຕອນທີ 3 ຫຼັງຈາກການຕັ້ງຄ່າຕົວກໍານົດການເລີ່ມຕົ້ນຂ້າງເທິງນີ້ແລະການດາວໂຫຼດໂຄງການ, ການຄວບຄຸມຕົວຕ້ານການໃນການໂຕ້ຕອບການສ້າງແຜນທີ່ Module I/O.
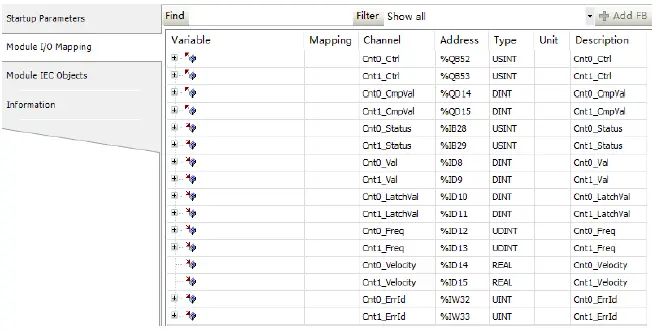
- Cntx_Ctrl(x=0,1) ແມ່ນຕົວກໍານົດການຄວບຄຸມຕ້ານ. ເອົາ counter 0 ເປັນ exampດັ່ງນັ້ນ, ຄໍານິຍາມຂໍ້ມູນສາມາດພົບໄດ້ໃນຄໍາອະທິບາຍພາລາມິເຕີ.
| ບິດ | ຊື່ | ລາຍລະອຽດ |
| Bit0 | ເປີດໃຊ້ການນັບ | 0: ປິດໃຊ້ງານ 1: ເປີດໃຊ້ງານ |
| Bit1 | ລຶບລ້າງມູນຄ່າການນັບ | ມີປະສິດທິພາບຢູ່ໃນຂອບເຂດທີ່ເພີ່ມຂຶ້ນ |
| Bit2 | ຂຽນຄ່າ counter preset | ມີປະສິດທິພາບຢູ່ໃນຂອບເຂດທີ່ເພີ່ມຂຶ້ນ |
| Bit3 | ທຸງ overflow ການນັບທີ່ຊັດເຈນ | ມີປະສິດທິພາບຢູ່ໃນຂອບເຂດທີ່ເພີ່ມຂຶ້ນ |
| Bit4 | ການປຽບທຽບ | 0: ປິດໃຊ້ງານ 1: ເປີດໃຊ້ງານ |
| Bit7–bit5 | ສະຫງວນໄວ້ | ສະຫງວນໄວ້ |
- Cntx_CmpVal(x=0,1) ແມ່ນຄ່າປຽບທຽບຂອງປະເພດ DINT.
- ສົມມຸດວ່າ Cnt0_CmpVal ຖືກຕັ້ງເປັນ 1000000 ແລະທ່ານຕ້ອງການເປີດໃຊ້ counter ສໍາລັບການປຽບທຽບ, ຕັ້ງ Cnt0_Ctrl ເປັນ 17, ຊຶ່ງເປັນ 2#00010001. ລາຍລະອຽດມີດັ່ງນີ້.
| Bit7–bit5 | Bit4 | Bit3 | Bit2 | Bit1 | Bit0 |
| 000 | 1 | 0 | 0 | 0 | 1 |
| ສະຫງວນໄວ້ | 1: ເປີດໃຊ້ງານ | ມີປະສິດທິພາບຢູ່ໃນຂອບເຂດທີ່ເພີ່ມຂຶ້ນ | ມີປະສິດທິພາບຢູ່ໃນຂອບເຂດທີ່ເພີ່ມຂຶ້ນ | ມີປະສິດທິພາບຢູ່ໃນຂອບເຂດທີ່ເພີ່ມຂຶ້ນ | 1: ເປີດໃຊ້ງານ |
ອີງຕາມຄ່າການຕັ້ງຄ່າ 788 ຂອງ Cnt0 Cfg ທີ່ໄດ້ກ່າວມາຂ້າງເທິງ (ເຮັດໃຫ້ DO ຜົນຜະລິດ pulse 8ms ເມື່ອການປຽບທຽບແມ່ນສອດຄ່ອງ), ເມື່ອມູນຄ່າການນັບ Cnt0_Val ເທົ່າກັບ 1000000, DO0 ຈະຜົນຜະລິດ 8ms.
ເພື່ອລຶບຄ່ານັບປັດຈຸບັນຂອງ counter 0, ຕັ້ງ Cnt0_Ctrl ເປັນ 2, ເຊິ່ງເປັນ 2#00000010. ລາຍລະອຽດມີດັ່ງນີ້.
| Bit7–bit5 | Bit4 | Bit3 | Bit2 | Bit1 | Bit0 |
| 000 | 0 | 0 | 0 | 1 | 0 |
| ສະຫງວນໄວ້ | 0: ຄົນພິການ | ມີປະສິດທິພາບຢູ່ໃນຂອບເຂດທີ່ເພີ່ມຂຶ້ນ | ມີປະສິດທິພາບຢູ່ໃນຂອບເຂດທີ່ເພີ່ມຂຶ້ນ | ມີປະສິດທິພາບຢູ່ໃນຂອບເຂດທີ່ເພີ່ມຂຶ້ນ | 0: ຄົນພິການ |
- ໃນຈຸດນີ້, bit1 ຂອງ Cnt0_Ctrl ປ່ຽນແປງຈາກ 0 ຫາ 1. ໂມດູນ FL6112_2EI ຕິດຕາມການເພີ່ມຂຶ້ນຂອງບິດນີ້ແລະລຶບມູນຄ່າການນັບຂອງ counter 0, ຊຶ່ງຫມາຍຄວາມວ່າ Cnt0_Val ຖືກລຶບລ້າງ.
ເອກະສານຊ້ອນທ້າຍ A ຄໍາອະທິບາຍພາລາມິເຕີ
| ຊື່ພາລາມິເຕີ | ປະເພດ | ລາຍລະອຽດ |
| 2EI Cnt0 Cfg | UINT | ພາຣາມິເຕີການຕັ້ງຄ່າສຳລັບ counter 0: Bit1–bit0: ການຕັ້ງຄ່າຮູບແບບຊ່ອງ
00: A/B ໄລຍະ quadruple ຄວາມຖີ່; 01: ໄລຍະ A/B ຄວາມຖີ່ສອງເທົ່າ; 10: ໄລຍະ A/B ລະດັບຄວາມຖີ່; 11: Pulse + ທິດທາງ (ລະດັບສູງ, ບວກ) Bit3–bit2: ໄລຍະເວລາການວັດແທກຄວາມຖີ່ 00: 20ms; 01: 100ms; 10: 500ms; 11: 1000ms Bit5–bit4: ເປີດໃຊ້ຄ່າການນັບສະລັກຂອບ 00: ຄົນພິການ; 01: ແຂບຂຶ້ນ; 10: ແຂບຕົກ; 11: ສອງແຄມ Bit7–bit6: ສະຫງວນໄວ້ Bit9–bit8: Pulse output width ເມື່ອການປຽບທຽບແມ່ນສອດຄ່ອງ 00: 1ms; 01: 2ms; 10: 4ms; 11: 8ms Bit11–bit10: ເຮັດໂໝດການປຽບທຽບຜົນຜະລິດ 00: ຜົນຜະລິດໃນເວລາທີ່ການປຽບທຽບແມ່ນສອດຄ່ອງ; 01: ຜົນຜະລິດລະຫວ່າງ [ຂອບເຂດຈໍາກັດຕ່ໍາກວ່າ, ມູນຄ່າການປຽບທຽບ]; 10: ຜົນຜະລິດລະຫວ່າງ [ມູນຄ່າການປຽບທຽບ, ຂອບເຂດຈໍາກັດເທິງຂອງຈໍານວນ]; 11: ສະຫງວນໄວ້ (ຜົນໄດ້ຮັບເມື່ອປຽບທຽບແມ່ນສອດຄ່ອງ) Bit15–bit12: ສະຫງວນໄວ້ |
| 2EI Cnt1 Cfg | UINT | ພາຣາມິເຕີການຕັ້ງຄ່າສຳລັບ counter 1. ການຕັ້ງຄ່າພາລາມິເຕີແມ່ນສອດຄ່ອງກັບ counter 0. |
| 2EI Cnt0 ການກັ່ນຕອງ | UINT | ຕົວກໍານົດການກັ່ນຕອງສໍາລັບ counter 0 A/B/Z/DI port. ຂອບເຂດຄໍາຮ້ອງສະຫມັກ 0–65535 (ຫນ່ວຍງານ: 0.1μs) |
| 2EI Cnt1 ການກັ່ນຕອງ | UINT | ຕົວກໍານົດການກັ່ນຕອງສໍາລັບ counter 1 A/B/Z/DI port. ຂອບເຂດຄໍາຮ້ອງສະຫມັກ 0–65535 (ຫນ່ວຍງານ: 0.1μs) |
| ອັດຕາສ່ວນ 2EI Cnt0 | UINT | ຄວາມລະອຽດຕົວເຂົ້າລະຫັດສຳລັບເຄື່ອງນັບ 0 (ຈຳນວນຂອງກຳມະຈອນທີ່ປ້ອນຈາກການປະຕິວັດໜຶ່ງຄັ້ງ, ການເພີ່ມກຳມະຈອນລະຫວ່າງສອງກຳມະຈອນ Z). |
| ອັດຕາສ່ວນ 2EI Cnt1 | UINT | ຄວາມລະອຽດຕົວເຂົ້າລະຫັດສຳລັບເຄື່ອງນັບ 1 (ຈຳນວນຂອງກຳມະຈອນທີ່ປ້ອນຈາກການປະຕິວັດໜຶ່ງຄັ້ງ, ການເພີ່ມກຳມະຈອນລະຫວ່າງສອງກຳມະຈອນ Z). |
| 2EI Cnt0 PresetVal | DINT | Counter 0 ຄ່າ preset. |
| ຊື່ພາລາມິເຕີ | ປະເພດ | ລາຍລະອຽດ |
| 2EI Cnt1 PresetVal | DINT | Counter 1 ຄ່າ preset. |
| Cnt0_Ctrl | USINT | ພາຣາມິເຕີຄວບຄຸມສຳລັບ counter 0.
Bit0: ເປີດໃຊ້ການນັບ, ຖືກຕ້ອງໃນລະດັບສູງ Bit1: ການນັບທີ່ຊັດເຈນ, ຖືກຕ້ອງຢູ່ຂອບທີ່ເພີ່ມຂຶ້ນ. Bit2: ຂຽນຄ່າ counter preset, ຖືກຕ້ອງຢູ່ຂອບທີ່ເພີ່ມຂຶ້ນ Bit3: Clear count overflow flag, valid at the rising edge Bit4: ເປີດໃຊ້ງານການສົມທຽບການນັບ, ໃຊ້ໄດ້ໃນລະດັບສູງ (ສະຫນອງໃຫ້ວ່າການນັບໄດ້ຖືກເປີດໃຊ້ງານ.) Bit7–bit5: ສະຫງວນໄວ້ |
| Cnt1_Ctrl | USINT | ພາລາມິເຕີການຄວບຄຸມສໍາລັບ counter 1. ພາລາມິເຕີ
ການຕັ້ງຄ່າແມ່ນສອດຄ່ອງກັບ counter 0. |
| Cnt0_CmpVal | DINT | Counter 0 ມູນຄ່າການປຽບທຽບ |
| Cnt1_CmpVal | DINT | Counter 1 ມູນຄ່າການປຽບທຽບ |
| Cnt0_ສະຖານະ | USINT | Counter 0 count state feedback Bit0: Forward run flag bit
Bit1: Reverse run flag bit Bit2: Overflow flag bit Bit3: Underflow flag bit Bit4: DI0 ທຸງສໍາເລັດຮູບສະລັກ Bit7–bit5: ສະຫງວນໄວ້ |
| Cnt1_ສະຖານະ | USINT | Counter 1 count state feedback Bit0: Forward run flag bit
Bit1: Reverse run flag bit Bit2: Overflow flag bit Bit3: Underflow flag bit Bit4: DI1 ທຸງສໍາເລັດຮູບສະລັກ Bit7–bit5: ສະຫງວນໄວ້ |
| Cnt0_Val | DINT | ນັບມູນຄ່າຂອງຕົວນັບ 0 |
| Cnt1_Val | DINT | ນັບມູນຄ່າຂອງຕົວນັບ 1 |
| Cnt0_LatchVal | DINT | ຄ່າທີ່ຈັບຄູ່ຂອງ counter 0 |
| Cnt1_LatchVal | DINT | ຄ່າທີ່ຈັບຄູ່ຂອງ counter 1 |
| Cnt0_Freq | UDINT | ຕ້ານ 0 ຄວາມຖີ່ |
| Cnt1_Freq | UDINT | ຕ້ານ 1 ຄວາມຖີ່ |
| Cnt0_ຄວາມໄວ | ທີ່ແທ້ຈິງ | ຕ້ານ 0 ຄວາມໄວ |
| Cnt1_ຄວາມໄວ | ທີ່ແທ້ຈິງ | ຕ້ານ 1 ຄວາມໄວ |
| Cnt0_ErrId | UINT | Counter 0 ລະຫັດຄວາມຜິດພາດ |
| Cnt1_ErrId | UINT | Counter 1 ລະຫັດຄວາມຜິດພາດ |
ເອກະສານຊ້ອນທ້າຍ B ລະຫັດຜິດ
| ຄວາມຜິດ ລະຫັດ (ທົດສະນິຍົມ) | ລະຫັດຜິດ (ເລກຖານສິບຫົກ) |
ຄວາມຜິດ ປະເພດ |
ການແກ້ໄຂ |
|
1 |
0x0001 |
ຄວາມຜິດໃນການຕັ້ງຄ່າໂມດູນ |
ໃຫ້ແນ່ໃຈວ່າການສ້າງແຜນທີ່ທີ່ຖືກຕ້ອງລະຫວ່າງການຕັ້ງຄ່າເຄືອຂ່າຍໂມດູນແລະການຕັ້ງຄ່າທາງດ້ານຮ່າງກາຍ. |
| 2 | 0x0002 | ໂມດູນບໍ່ຖືກຕ້ອງ
ການຕັ້ງຄ່າພາລາມິເຕີ |
ໃຫ້ແນ່ໃຈວ່າພາລາມິເຕີໂມດູນນັ້ນ
ການຕັ້ງຄ່າຖືກຕ້ອງ. |
| 3 | 0x0003 | Module output port ການສະຫນອງພະລັງງານຄວາມຜິດ | ໃຫ້ແນ່ໃຈວ່າການສະຫນອງພະລັງງານທີ່ Port output ຂອງໂມດູນແມ່ນປົກກະຕິ. |
|
4 |
0x0004 |
ໂມດູນຜົນຜະລິດຜິດພາດ |
ໃຫ້ແນ່ໃຈວ່າຜົນໄດ້ຮັບຂອງໂມດູນ
ການໂຫຼດພອດແມ່ນຢູ່ພາຍໃນຂອບເຂດທີ່ກໍານົດໄວ້. |
|
18 |
0x0012 |
ການຕັ້ງຄ່າພາລາມິເຕີບໍ່ຖືກຕ້ອງສໍາລັບຊ່ອງ 0 | ໃຫ້ແນ່ໃຈວ່າການຕັ້ງຄ່າພາລາມິເຕີສໍາລັບຊ່ອງ 0 ແມ່ນ
ຖືກຕ້ອງ. |
|
20 |
0x0014 |
ຄວາມຜິດຂອງຜົນຜະລິດໃນຊ່ອງ 0 |
ໃຫ້ແນ່ໃຈວ່າຜົນຜະລິດຂອງ
ຊ່ອງ 0 ບໍ່ມີວົງຈອນສັ້ນຫຼືວົງຈອນເປີດ. |
|
21 |
0x0015 |
ແຫຼ່ງສັນຍານຄວາມຜິດວົງຈອນເປີດຢູ່ຊ່ອງ 0 | ໃຫ້ແນ່ໃຈວ່າແຫຼ່ງສັນຍານການເຊື່ອມຕໍ່ທາງດ້ານຮ່າງກາຍຂອງຊ່ອງທາງ
0 ແມ່ນປົກກະຕິ. |
|
22 |
0x0016 |
Sampຂີດຈຳກັດສັນຍານ
ຜິດພາດຫຼາຍເກີນໄປໃນຊ່ອງ 0 |
ຮັບປະກັນວ່າ sampສັນຍານ ling
ໃນຊ່ອງ 0 ບໍ່ເກີນຂອບເຂດຈໍາກັດຂອງຊິບ. |
|
23 |
0x0017 |
Sampການວັດແທກສັນຍານ ling ຂອບເຂດເທິງເກີນຄວາມຜິດ
ຊ່ອງ 0 |
ຮັບປະກັນວ່າ sampສັນຍານ ling ໃນຊ່ອງ 0 ບໍ່ເກີນຂອບເຂດຈໍາກັດເທິງການວັດແທກ. |
|
24 |
0x0018 |
Sampling ການວັດແທກສັນຍານກໍານົດຕ່ໍາເກີນຄວາມຜິດພາດກ່ຽວກັບການ
ຊ່ອງ 0 |
ຮັບປະກັນວ່າ sampສັນຍານ ling ໃນຊ່ອງ 0 ບໍ່ເກີນຂອບເຂດຈໍາກັດຕ່ໍາຂອງການວັດແທກ. |
|
34 |
0x0022 |
ການຕັ້ງຄ່າພາລາມິເຕີບໍ່ຖືກຕ້ອງສໍາລັບຊ່ອງ 1 | ໃຫ້ແນ່ໃຈວ່າພາລາມິເຕີ
ການຕັ້ງຄ່າຊ່ອງ 1 ແມ່ນຖືກຕ້ອງ. |
| ຄວາມຜິດ
ລະຫັດ (ທົດສະນິຍົມ) |
ລະຫັດຜິດ (ເລກຖານສິບຫົກ) |
ຄວາມຜິດ ປະເພດ |
ການແກ້ໄຂ |
|
36 |
0x0024 |
ຄວາມຜິດຂອງຜົນຜະລິດໃນຊ່ອງ 1 |
ໃຫ້ແນ່ໃຈວ່າຜົນຜະລິດຂອງຊ່ອງ 1 ບໍ່ມີວົງຈອນສັ້ນຫຼືວົງຈອນເປີດ. |
|
37 |
0x0025 |
ແຫຼ່ງສັນຍານຄວາມຜິດວົງຈອນເປີດຢູ່ຊ່ອງ 1 | ໃຫ້ແນ່ໃຈວ່າການເຊື່ອມຕໍ່ທາງກາຍະພາບຂອງແຫຼ່ງສັນຍານຂອງຊ່ອງ 1 ແມ່ນປົກກະຕິ. |
|
38 |
0x0026 |
Sampສັນຍານ ling ເກີນຄວາມຜິດໃນຊ່ອງ 1 | ຮັບປະກັນວ່າ sampສັນຍານ ling ໃນຊ່ອງ 1 ບໍ່ເກີນຂອບເຂດຈໍາກັດຂອງຊິບ. |
|
39 |
0x0027 |
Sampling ການວັດແທກສັນຍານກໍານົດເທິງເກີນຄວາມຜິດພາດໃນຊ່ອງ 1 | ຮັບປະກັນວ່າ sampສັນຍານ ling ໃນຊ່ອງ 1 ບໍ່ເກີນຂອບເຂດຈໍາກັດເທິງການວັດແທກ. |
|
40 |
0x0028 |
Sampການວັດແທກສັນຍານ ling ຂີດຈໍາກັດຕ່ໍາເກີນຄວາມຜິດພາດຢູ່ໃນຊ່ອງ 1 | ຮັບປະກັນວ່າ sampສັນຍານ ling ໃນຊ່ອງ 1 ບໍ່ເກີນຂອບເຂດຈໍາກັດຕ່ໍາຂອງການວັດແທກ. |
ຕິດຕໍ່
Shenzhen INVT Electric Co., Ltd.
- ທີ່ຢູ່: INVT Guangming Technology Building, Songbai Road, Matian,
- ເຂດມົນທົນກວາງນິງ, ເສິນ, ຈີນ
ບໍລິສັດ INVT Power Electronics (Suzhou) Co., Ltd.
- ທີ່ຢູ່: ເລກທີ 1 ຖະໜົນພູຄູນ, ເມືອງວິທະຍາສາດ ແລະ ເຕັກໂນໂລຊີ,
- ເມືອງ Gaoxin, Suzhou, Jiangsu, ຈີນ

Webເວັບໄຊ: www.invt.com
ຂໍ້ມູນຄູ່ມືອາດຈະມີການປ່ຽນແປງໂດຍບໍ່ມີການແຈ້ງລ່ວງໜ້າ.
ເອກະສານ / ຊັບພະຍາກອນ
 |
invt FK1100 Dual Channel Incremental Encoder Detection Module [pdf] ຄູ່ມືຜູ້ໃຊ້ FK1100, FK1200, FK1300, TS600, TM700, FK1100 Dual Channel Incremental Encoder Detection Module, FK1100, Dual Channel Incremental Encoder Detection Module, Channel Incremental Encoder Detection Module, Encremental Detection ule, ໂມດູນ |