![]()
AX7 ![]() Serie CPU-modul brugermanual
Serie CPU-modul brugermanual
AX7 Series CPU-modul
Tak fordi du valgte AX serie programmerbar controller (programmerbar controller for kort).
Baseret på Invtmatic Studio-platformen, understøtter den programmerbare controller fuldt ud IEC61131-3 programmeringssystemer, EtherCAT real-time fieldbus, CANopen fieldbus og højhastighedsporte og leverer elektronisk knast, elektronisk gear og interpolationsfunktioner.
Manualen beskriver hovedsageligt specifikationerne, funktionerne, ledningerne og brugsmetoderne for den programmerbare controllers CPU-modul. For at sikre, at du bruger produktet sikkert og korrekt og bringe det i fuldt spil, skal du læse manualen omhyggeligt før installationen. For detaljer om brugerprogramudviklingsmiljøer og brugerprogramdesignmetoder, se AX Series Programmerbar Controller Hardware User Manual og AX Series Programmable Controller Software User Manual, som vi udsteder.
Manualen kan ændres uden forudgående varsel. Besøg venligst http://www.invt.com for at downloade den seneste manualversion.
Sikkerhedsforanstaltninger
Advarsel
| Symbol | Navn | Beskrivelse | Forkortelse |
| Fare |
Fare | Alvorlig personskade eller endda død kan resultere, hvis relaterede krav ikke følges. | |
| Advarsel |
Advarsel | Personskade eller beskadigelse af udstyr kan opstå, hvis relaterede krav ikke overholdes. |
Levering og montering
| • Kun uddannede og kvalificerede fagfolk må udføre installation, ledningsføring, vedligeholdelse og inspektion. • Installer ikke den programmerbare controller på brændbare stoffer. Derudover skal du forhindre, at den programmerbare controller kommer i kontakt med eller klæber til brændbare stoffer. • Installer den programmerbare controller i et aflåseligt styreskab på mindst IP20, hvilket forhindrer personale uden elektrisk udstyrsrelateret viden i at røre ved en fejl, da fejlen kan resultere i udstyrsskade eller elektrisk stød. Kun personale, der har modtaget relateret elektrisk viden og træning af udstyrsdrift, kan betjene styreskabet. • Kør ikke den programmerbare controller, hvis den er beskadiget eller ufuldstændig. • Kontakt ikke den programmerbare controller med damp genstande eller kropsdele. Ellers kan der opstå elektrisk stød. |
Kabelvalg
| • Kun uddannede og kvalificerede fagfolk må udføre installation, ledningsføring, vedligeholdelse og inspektion. • Forstå interfacetyper, specifikationer og relaterede krav fuldt ud, før ledningsføring. Ellers vil forkert ledningsføring forårsage unormalt løb. • Afbryd alle strømforsyninger, der er tilsluttet den programmerbare controller, før du udfører ledningsføring. • Før strømmen tændes for drift, skal du sikre dig, at hvert modulklemmedæksel er korrekt installeret på plads, efter at installationen og ledningsføringen er afsluttet. Dette forhindrer en strømførende terminal i at blive berørt. Ellers kan det medføre fysisk skade, udstyrsfejl eller funktionsfejl. • Installer passende beskyttelseskomponenter eller -enheder, når du bruger eksterne strømforsyninger til den programmerbare controller. Dette forhindrer den programmerbare controller i at blive beskadiget på grund af ekstern strømforsyningsfejl, overvoltage, overstrøm eller andre undtagelser. |
Idriftsættelse og drift
| • Før opstart til drift, skal du sikre dig, at arbejdsmiljøet for den programmerbare controller opfylder kravene, ledningsføringen er korrekt, inputeffektspecifikationerne opfylder kravene, og et beskyttelseskredsløb er designet til at beskytte den programmerbare controller, så den programmerbare controlleren kan køre sikkert, selvom der opstår en ekstern enhedsfejl. • For moduler eller terminaler, der kræver ekstern strømforsyning, konfigurer eksterne sikkerhedsanordninger såsom sikringer eller strømafbrydere for at forhindre skader forårsaget af ekstern strømforsyning eller enhedsfejl. |
Vedligeholdelse og udskiftning af komponenter
| • Kun uddannede og kvalificerede fagfolk må udføre vedligeholdelse, inspektion og udskiftning af komponenter for programmerbar controller. • Afbryd alle strømforsyninger, der er tilsluttet den programmerbare controller, før terminalledningerne sættes i. • Under vedligeholdelse og udskiftning af komponenter skal du træffe foranstaltninger for at forhindre, at skruer, kabler og andre ledende stoffer falder ind i den programmerbare controllers indre. |
Bortskaffelse
| Den programmerbare controller indeholder tungmetaller. Bortskaf en skrot programmerbar controller som industriaffald. | |
| Bortskaf et skrotprodukt separat på et passende indsamlingssted, men anbring det ikke i den normale affaldsstrøm. |
Produktintroduktion
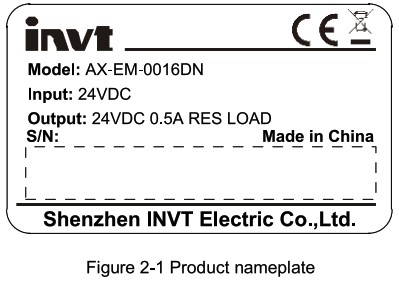
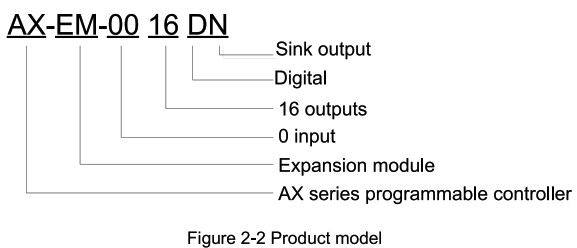
Model og navneskilt
Funktion overståetview
Som hovedkontrolmodulet for den programmerbare controller har AX7J-C-1608L] CPU-modul (forkortet CPU-modul) følgende funktioner:
- Realiserer kontrol, overvågning, databehandling og netværkskommunikation for det kørende system.
- Understøtter programmeringssprogene IL, ST, FBD, LD, CFC og SFC, der er kompatible med IEC61131-3-standarderne ved at bruge Invtmatic Studio-platformen, som INVT har lanceret til programmering.
- Understøtter 16 lokale udvidelsesmoduler (såsom I/O, temperatur og analoge moduler).
- Bruger Ether CAT eller CAN open bus til at forbinde slavemoduler, som hver understøtter 16 udvidelsesmoduler (såsom I/O, temperatur og analoge moduler).
- Understøtter Modbus TCP master/slave protokol.
- Integrerer to RS485-grænseflader, der understøtter Modbus RTU master/slave-protokol.
- Understøtter højhastigheds I/O, 16 højhastighedsindgange og 8 højhastighedsudgange.
- Understøtter EtherCAT fieldbus motion control med synkroniseringstid på 1ms, 2ms, 4ms eller 8ms.
- Understøtter pulsbaseret enkelt- eller flerakset bevægelseskontrol, inklusive 2-4 akset lineær interpolation og 2-akset bueinterpolation.
- Understøtter realtidsur.
- Understøtter strømsvigt databeskyttelse.
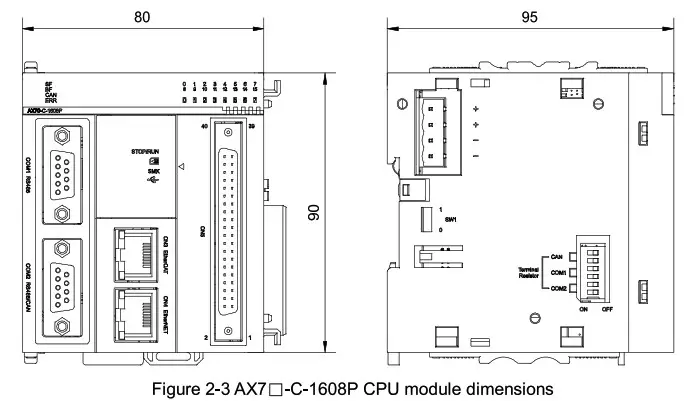
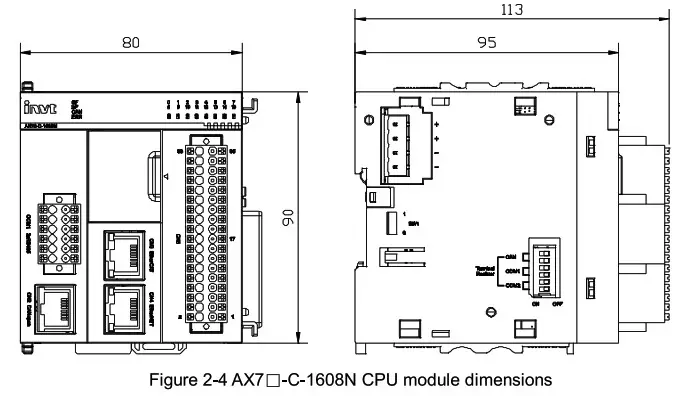
Strukturelle dimensioner
De strukturelle dimensioner (enhed: mm) er vist i følgende figur.
Interface
Interface beskrivelse
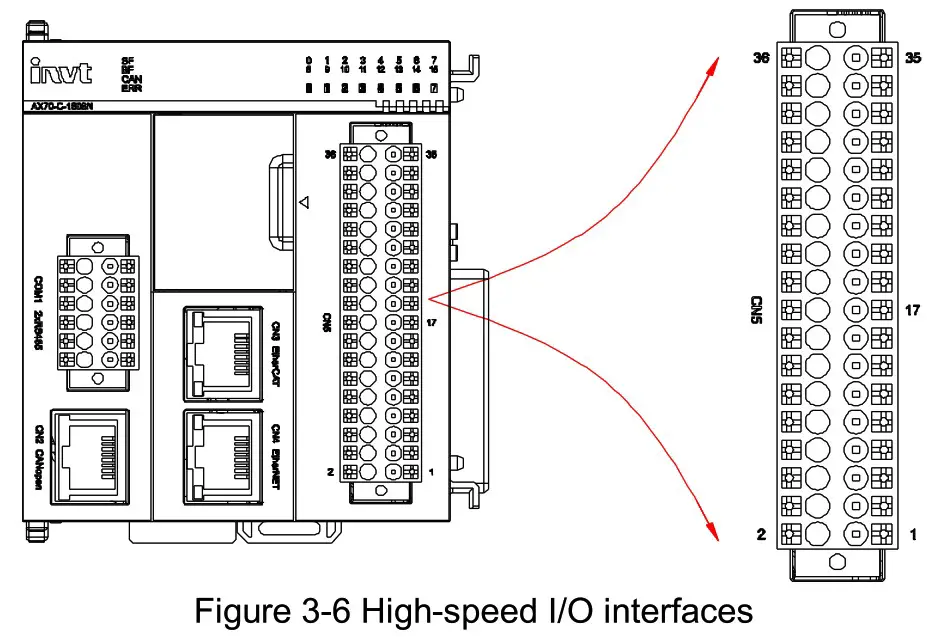
Interface distribution
Figur 3-1 og Figur 3-2 viser CPU-modulets interfacefordeling. For hver grænseflade findes en respektive silkescreen-beskrivelse i nærheden, som letter ledninger, betjening og kontrol.
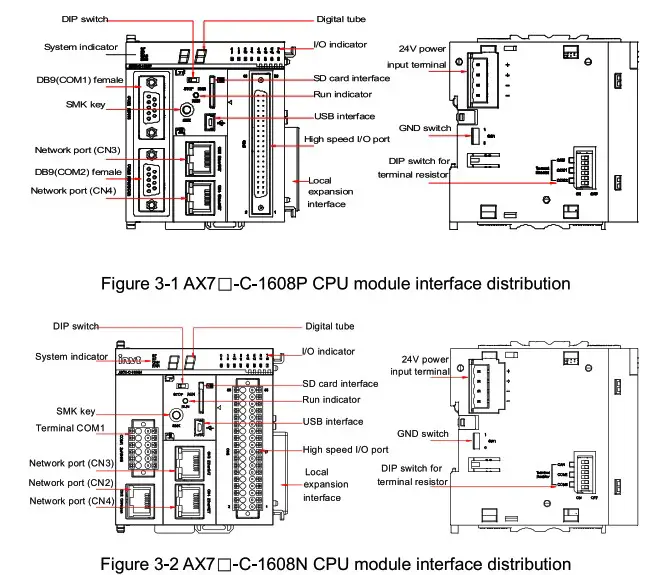
| Interface | Fungere | |
| DIP-switch | RUN/STOP DIP-kontakt. | |
| Systemindikator | SF: Systemfejlindikator. BF: Bus fejlindikator. CAN: CAN-bus fejlindikator. ERR: Modulfejlindikator. |
|
| SMK nøgle | SMK smart nøgle. | |
| WO-C-1608P | COM1 (DB9) kvinde |
Ét RS485-interface, der understøtter Modbus RTU master/slave protokol. |
| COM2 (DB9) kvinde |
Et RS485-interface og det andet CAN-interface RS485-grænsefladen understøtter Modbus RTU master/slave-protokol, og den anden CAN-grænseflade understøtter CANopen master/slave-protokol. |
|
| AX70-C-1608N | COM1&COM2 (Push-in n-terminal) | To RS485-grænseflader, der understøtter Modbus RTU master/slave protokol. |
| CN2 (RJ45) | CAN interface, der understøtter CAN open master/slave protokol. | |
| CN3 (RJ45) | Ether CAT interface | |
| CN4 (RJ45) | 1.Modbus TCP-protokol 2.Standard Ethernet-funktioner 3. Brugerprogram download og fejlretning (kun med IPv4) |
|
| Digitalt rør | Viser alarmer og svar på SMK tastetryk. | |
| I/O-indikator | Angiver om signalerne på 16 indgange og 8 udgange er gyldige. | |
| SD-kort interface | Bruges til at gemme brugerprogrammer og data. | |
| Kørselsindikator | Angiver om CPU-modulet kører. | |
| USB interface | Bruges til at downloade og fejlfinde programmer. | |
| Højhastigheds I/O | 16 højhastighedsindgange og 8 højhastighedsudgange. | |
| Lokal udvidelsesgrænseflade | Understøtter udvidelse af 16 I/O-moduler, hvilket forhindrer hot swapping. | |
| 24V strømgrænseflade | DC 24V voltage input | |
| Jordingskontakt | Forbindelsesafbryder mellem systemets interne digitale jord og husjord. Den er afbrudt som standard (SW1 er sat til 0). Det bruges kun i specielle scenarier, hvor systemets interne digitale jord er taget som referenceplan. Vær forsigtig, før du betjener den. Ellers påvirkes systemets stabilitet. | |
| DIP-switch på klemmodstand | ON angiver terminalmodstandsforbindelse (den er OFF som standard). COM1 svarer til RS485-1, COM2 svarer til RS485-2, og CAN svarer til CAN. | |
SMK nøgle
SMK-nøglen bruges hovedsageligt til at nulstille CPU-modulets IP-adresse (rP) og rydde applikationsprogrammer (cA). Standard CPU-moduladressen er 192.168.1.10. Hvis du vil gendanne standardadressen fra en ændret IP-adresse, kan du gendanne standardadressen via SMK-tasten. Metoden er som følger:
- Indstil CPU-modulet til STOP-tilstand. Tryk på SMK-tasten. Når det digitale rør viser "rP", skal du trykke på og holde SMK-tasten nede. Derefter viser det digitale rør "rP" og slukker skiftevis, hvilket indikerer, at IP-adressenulstilling udføres. Nulstillingsoperationen lykkes, når det digitale rør er konstant slukket. Hvis du slipper SMK-tasten på dette tidspunkt, viser det digitale rør "rP". Tryk og hold SMK-tasten nede, indtil røret viser "00" (rP—cA—rU-rP).
- Hvis du slipper SMK-tasten under processen, hvor det digitale rør viser "rP" og slukker skiftevis, annulleres nulstilling af IP-adressen, og det digitale rør viser "rP".
Gør som følger for at rydde et program fra CPU-modulet:
Tryk på SMK-tasten. Når det digitale rør viser "cA", skal du trykke på og holde SMK-tasten nede. Derefter viser det digitale rør "rP" og slukker skiftevis, hvilket indikerer, at programmet slettes. Når det digitale rør er konstant slukket, genstart CPU-modulet. Programmet er ryddet.
Digital rørbeskrivelse
- Hvis programmer ikke har nogen fejl efter download, viser det digitale rør på CPU-modulet "00" konstant.
- Hvis et program har en fejl, viser det digitale rør fejlinformationen blinkende.
- F.eksample, hvis kun fejl 19 opstår, viser det digitale rør "19" og slukker skiftevis. Hvis fejl 19 og fejl 29 opstår samtidigt, viser det digitale rør "19", slukker, viser "29" og slukker skiftevis. Hvis der opstår flere fejl samtidigt, er visningen ens.
Terminal definition
AX7![]() -C-1608P COM1/COM2 kommunikationsterminal definition
-C-1608P COM1/COM2 kommunikationsterminal definition
For AX7LJ-C-1608P CPU-modul er COM1 RS485-kommunikationsterminalen og COM2 er RS485/CAN-kommunikationsterminalen, som begge bruger et DB9-stik til datatransmission. Grænsefladerne og benene er beskrevet i det følgende.
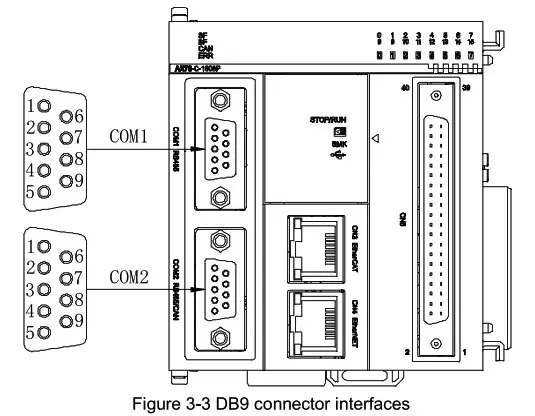
Tabel 3-1 COM1/COM2 DB39-stikben
| Interface | Fordeling | Stift | Definition | Fungere |
| COM1 (RS485) |
1 | / | / | |
| 2 | / | / | ||
| 3 | / | / | ||
| 4 | RS485A | RS485 differentialsignal + | ||
| 5 | RS485B | RS485 differentialsignal – | ||
| 6 | / | / | ||
| 7 | / | / | ||
| 8 | / | / | ||
| 9 | GND_RS485 | RS485 jordforbindelse | ||
| COM2 (RS485/CAN) |
1 | / | / | |
| 2 | KAN _L | CAN differentialsignal – | ||
| 3 | / | / | ||
| 4 | RS485A | RS485 differentialsignal + | ||
| 5 | RS485B | RS485 differentialsignal – | ||
| 6 | GND_CAN | KAN strøm til jord | ||
| 7 | KAN _H | CAN differentialsignal + | ||
| 8 | / | / | ||
| 9 | GND_RS485 | RS485 jordforbindelse |
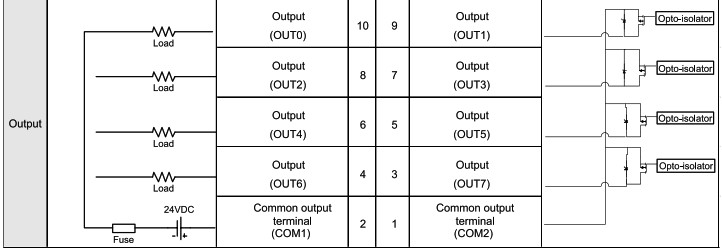
AX7![]() -C-1608P højhastigheds I/O terminal definition
-C-1608P højhastigheds I/O terminal definition
AX7![]() -C-1608P CPU-modul har 16 højhastighedsindgange og 8 højhastighedsudgange. Grænsefladerne og benene er beskrevet i det følgende.
-C-1608P CPU-modul har 16 højhastighedsindgange og 8 højhastighedsudgange. Grænsefladerne og benene er beskrevet i det følgende.
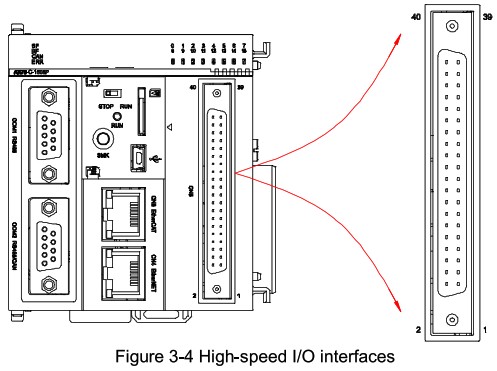
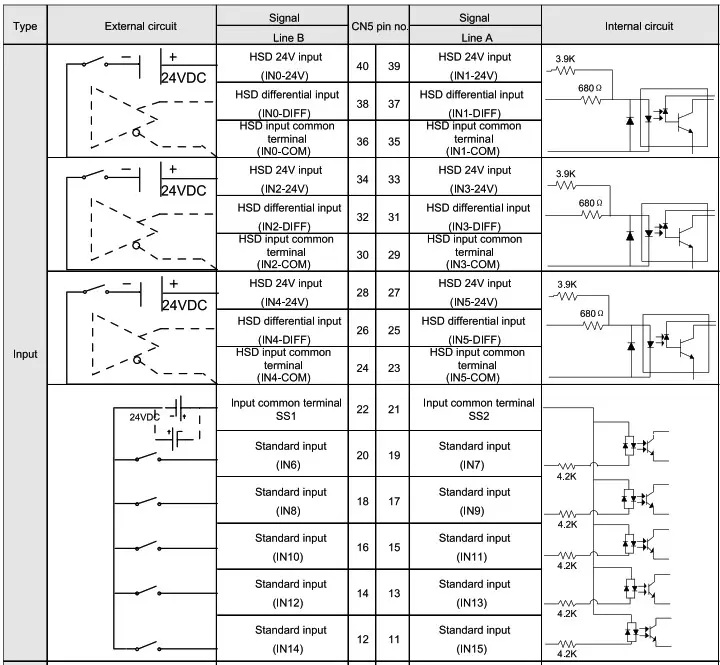
Tabel 3-2 Højhastigheds I/O-ben
AX7![]() -C-1608N COM1/CN2 kommunikationsterminal definition
-C-1608N COM1/CN2 kommunikationsterminal definition
Til AX7![]() -C-1608N CPU-modul, COM1 er den to-kanals RS485-kommunikationsterminal, der bruger et 12-bens push-in-stik til datatransmission. CN2 er CAN-kommunikationsterminalen, der bruger RJ45-stikket til datatransmission. Grænsefladerne og benene er beskrevet i det følgende.
-C-1608N CPU-modul, COM1 er den to-kanals RS485-kommunikationsterminal, der bruger et 12-bens push-in-stik til datatransmission. CN2 er CAN-kommunikationsterminalen, der bruger RJ45-stikket til datatransmission. Grænsefladerne og benene er beskrevet i det følgende.

Tabel 3-3 COM1/CN2-stikben
| Push-in terminalfunktioner i COM1 | ||||
| Definition | Fungere | Stift | ||
| COM1 RS485 | A | RS485 differentialsignal + |
12 | |
| B | RS485 differentialsignal – | 10 | ||
| GND | RS485 _1 chip strøm jord |
8 | ||
| PE | Skjoldjord | 6 | ||
| COM2 RS485 | A | RS485 differentialsignal + |
11 | |
| B | RS485 differentialsignal – | 9 | ||
| GND | RS485_2 chip strøm jord |
7 | ||
| PE | Skjoldjord | 5 | ||
| Bemærk: Ben 1-4 bruges ikke. | ||||
| Pin-funktioner af CN2 | ||||
| Definition | Fungere | Stift | ||
| CANopen | GND | KAN strøm til jord | 1 | |
| CAN_L | CAN differentialsignal – | 7 | ||
| CAN_H | CAN differentialsignal + | 8 | ||
| Bemærk: Ben 2-6 bruges ikke. | ||||
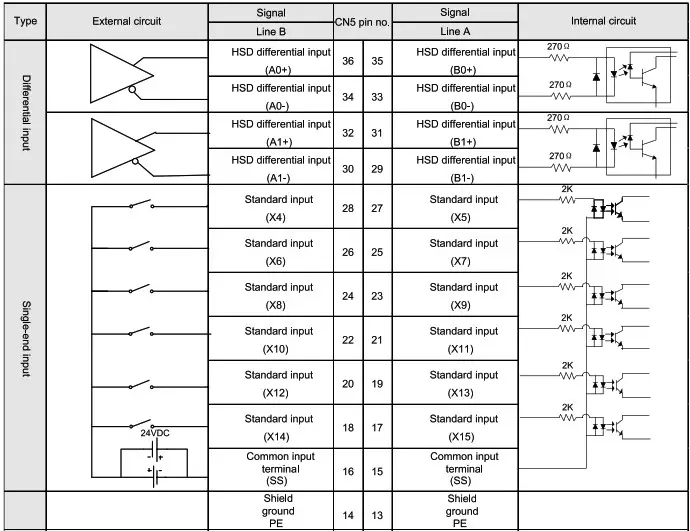
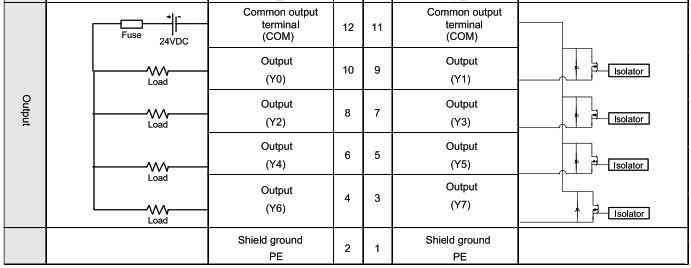
AX7![]() -C-1608N højhastigheds I/O terminal definition
-C-1608N højhastigheds I/O terminal definition
AX7![]() 1-C-1608N CPU-modul har 16 højhastighedsindgange og 8 højhastighedsudgange. Følgende figur viser terminalfordelingen, og følgende tabel viser benene.
1-C-1608N CPU-modul har 16 højhastighedsindgange og 8 højhastighedsudgange. Følgende figur viser terminalfordelingen, og følgende tabel viser benene.
Tabel 3-4 Højhastigheds I/O-ben
Note:
- Alle 16 indgangskanaler på AX7
 -C-1608P CPU-modul tillader højhastighedsinput, men de første 6 kanaler understøtter 24V single-end eller differential input, og de sidste 10 kanaler understøtter 24V single-end input.
-C-1608P CPU-modul tillader højhastighedsinput, men de første 6 kanaler understøtter 24V single-end eller differential input, og de sidste 10 kanaler understøtter 24V single-end input. - Alle 16 indgangskanaler på AX7-C-1608N CPU-modul tillader højhastighedsinput, men de første 4 kanaler understøtter differentiel input, og de sidste 12 kanaler understøtter 24V single-end input.
- Hvert I/O-punkt er isoleret fra det interne kredsløb.
- Den samlede længde af højhastigheds I/O-portforbindelseskablet må ikke overstige 3 meter.
- Bøj ikke kablerne, når kablerne fastgøres.
- Under kabelføring skal du adskille tilslutningskablerne fra højeffektkabler, der forårsager stærk interferens, men som ikke binder forbindelseskablerne med sidstnævnte sammen. Undgå desuden langdistance parallel routing.
Modul installation
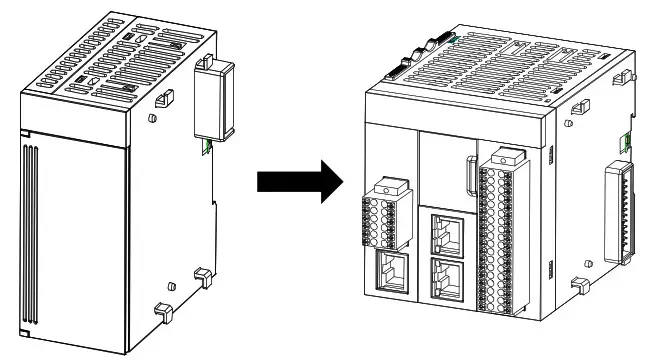
Ved hjælp af modulært design er den programmerbare controller nem at installere og vedligeholde. Hvad angår CPU-modulet, er hovedforbindelsesobjekterne strømforsyningen og udvidelsesmodulerne.
Modulerne forbindes ved hjælp af de modulleverede tilslutningsgrænseflader og snappas.
Monteringsproceduren er som følger:
| Trin 1 Skub snappasningen på CPU-modulet i retningen vist i følgende figur (ved hjælp af strømmodulet forbindelse til example). |
Trin 2 Juster CPU-modulet med strømmodulstikket til sammenlåsning. |
 |
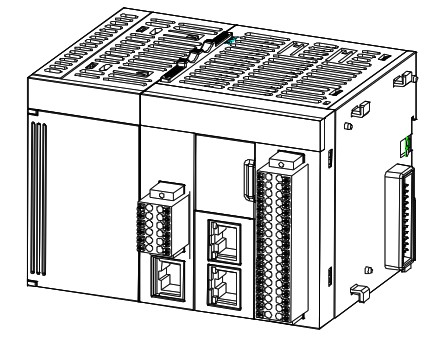 |
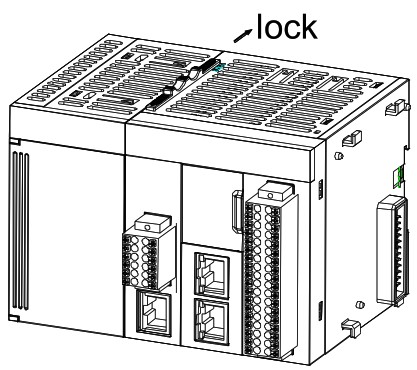
| Trin 3 Skub snap-pasningen på CPU-modulet i retningen vist i følgende figur for at forbinde og låse de to moduler. | Trin 4 Som for standard DIN-skinneinstallation, hægtes det respektive modul ind i standardinstallationsskinnen, indtil snappasningen klikker på plads. |
 |
 |
Kabeltilslutning og specifikationer
Ether CAT-busforbindelse
Ether CAT bus specifikationer
| Punkt | Beskrivelse |
| Kommunikationsprotokol | Ether CAT |
| Understøttet tjeneste | COE (BOB/SDO) |
| Min. synkroniseringsinterval | 1ms/4 akser (typisk værdi) |
| Synkroniseringsmetode | DC til sync/DC ubrugt |
| Fysisk lag | 100BASE-TX |
| Duplex-tilstand | Fuld duplex |
| Topologi struktur | Seriel forbindelse |
| Transmissionsmedium | Netværkskabel (se afsnittet "Kabelvalg") |
| Transmissionsafstand | Mindre end 100 m mellem to knudepunkter |
| Antal slaveknuder | Op til 125 |
| Ether CAT rammelængde | 44 bytes - 1498 bytes |
| Behandle data | Op til 1486 bytes indeholdt i en enkelt frame |
Kabelvalg
CPU-modulet kan implementere Ether CAT-buskommunikation gennem CN3-porten. INVT standardkabler anbefales. Hvis du laver kommunikationskablerne selv, skal du sikre dig, at kablerne opfylder følgende krav:
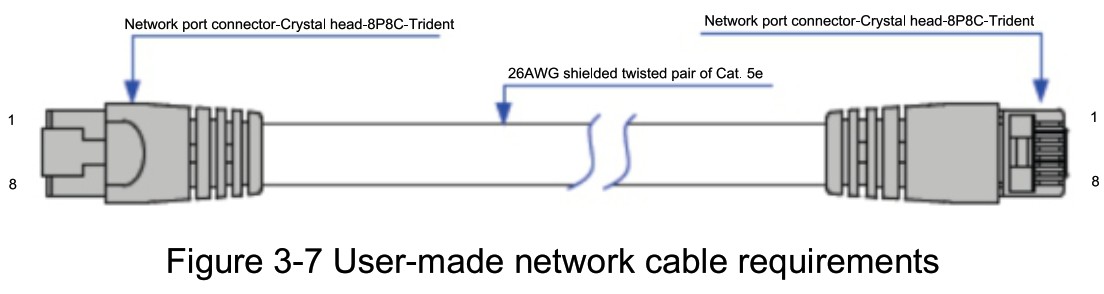
Note:
- Kommunikationskablerne du bruger skal bestå konduktivitetstesten 100 %, uden kortslutning, åbnet kredsløb, dislokation eller dårlig kontakt.
- For at sikre kommunikationskvaliteten må EtherCAT-kommunikationskablets længde ikke overstige 100 meter.
- Det anbefales at lave kommunikationskablerne ved at bruge de skærmede parsnoede kabler i kategori 5e, som er i overensstemmelse med EIA/TIA568A, EN50173, ISO/IEC11801, EIA/TIA bulletin TSB og EIA/TIA SB40-A&TSB36.
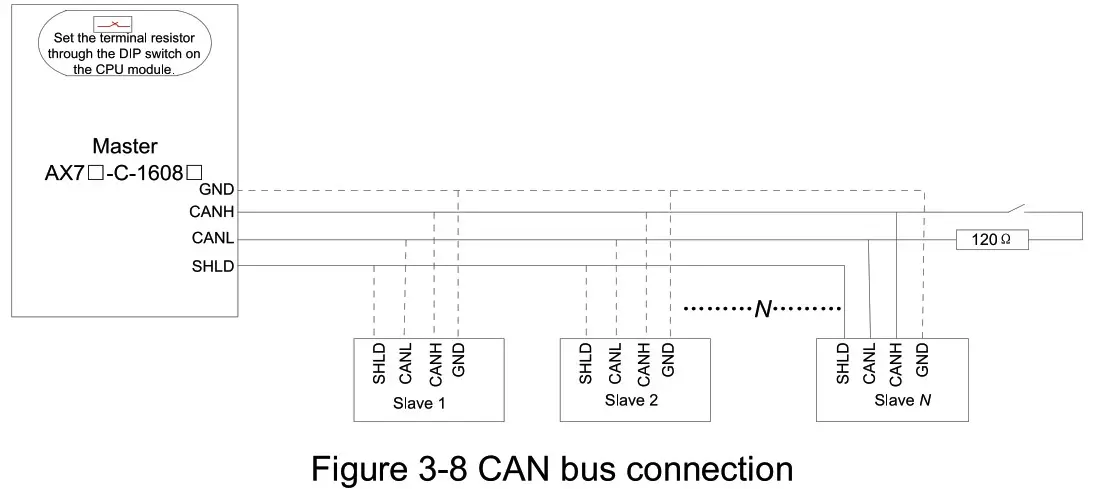
KAN åbne kabelforbindelse
Netværk
CAN-busforbindelsestopologistrukturen er vist i følgende figur. Det anbefales, at det skærmede snoede par bruges til CAN-busforbindelse. Hver ende af CAN-bussen forbindes til en 1200 terminal modstand for at forhindre signalrefleksion. I de fleste tilfælde bruger skærmlaget enkeltpunktsjording.
Kabelvalg
- Til AX7-C-1608P CPU-modul, den samme terminal bruges til både CANopen-kommunikation og RS485-kommunikation, ved hjælp af et DB9-stik til datatransmission. Benene i DB9-stikket er blevet beskrevet tidligere.
- Til AX71-C-1608N CPU-modul, RJ45-terminalen bruges til CANopen-kommunikation til datatransmission. Benene i RJ45-stikket er blevet beskrevet tidligere.
INVT standardkabler anbefales. Hvis du laver kommunikationskablerne selv, skal du lave kablerne i henhold til pinbeskrivelsen og sikre, at fremstillingsprocessen og de tekniske parametre opfylder kommunikationskravene.
Note:
- For at forbedre kablets anti-interferensevne anbefales det at bruge aluminiumsfolieafskærmning og aluminium-magnesium fletningsafskærmningsteknikker, når du laver kablerne.
- Brug den snoede parviklingsteknik til differentialkabler.
RS485 seriel kommunikationsforbindelse
CPU-modulet understøtter 2 kanaler med RS485-kommunikation.
- Til AX7-C-1608P CPU-modul, portene COM1 og COM2 bruger DB9-stikket til datatransmission. Benene i DB9-stikket er blevet beskrevet tidligere.
- Til AX7-C-1608N CPU-modul, porten bruger det 12-benede push-in terminalstik til datatransmission. Stifterne i terminalstikket er blevet beskrevet tidligere.
INVT standardkabler anbefales. Hvis du laver kommunikationskablerne selv, skal du lave kablerne i henhold til pinbeskrivelsen og sikre, at fremstillingsprocessen og de tekniske parametre opfylder kommunikationskravene.
Note:
- For at forbedre kablets anti-interferensevne anbefales det at bruge aluminiumsfolieafskærmning og aluminium-magnesium fletningsafskærmningsteknikker, når du laver kablerne.
- Brug den snoede parviklingsteknik til differentialkabler.
Ethernet-forbindelse
Netværk
Ethernet-porten på CPU-modulet er CN4, som kan forbindes til en anden enhed såsom en computer eller HMI-enhed ved at bruge et netværkskabel i punkt-til-punkt-tilstand.
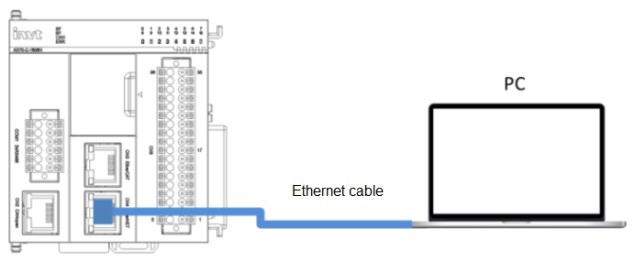
Figur 3-9 Ethernet-forbindelse
Du kan også tilslutte Ethernet-porten til en hub eller switch ved at bruge et netværkskabel, der implementerer multipunktsforbindelse.

Figur 3-10Ethernet-netværk
Kabelvalg
For at forbedre kommunikationssikkerheden skal du bruge skærmede parsnoede kabler af kategori 5 eller højere som Ethernet-kabler. INVT standardkabler anbefales.
Brug instruktionerne
Tekniske parametre
CPU-modulets generelle specifikationer
| Punkt | Beskrivelse | |||||
| Input voltage | 24VDC | |||||
| Strømforbrug | < 15W | |||||
| Strømsvigt beskyttelsestid |
300ms (ingen beskyttelse inden for 20 sekunder efter tænding) | |||||
| Backup batteri af realtid ur |
Understøttet | |||||
| Backplane bus strøm levere |
5V/2.5A | |||||
| Programmeringsmetode | IEC 61131-3 programmeringssprog (LD, FBD, IL, ST, SFC, og CFC) |
|||||
| Program udførelse metode |
Lokal online | |||||
| Opbevaring af brugerprogram plads |
10 MB | |||||
| Flash-hukommelsesplads for strømsvigt beskyttelse |
512KB | |||||
| SD-kort specifikationer |
32G MicroSD | |||||
| Bløde elementer og egenskaber |
||||||
| Element | Navn | Tælle | Opbevaringsegenskaber | |||
| Misligholdelse | Skrivbar | Beskrivelse | ||||
| I | Indgangsrelæ | 64KWord | Ikke gem | Ingen | X: 1 bit B. 8 bit B: 16 bit D: 32 bit L: 64 bit | |
| Q | Udgangsrelæ | 64KWord | Ikke gem | Ingen | ||
| M | Hjælpeudgang | 256KWord | Spare | Ja | ||
| Programopbevaring metode på magt fiasko |
Fastholdelse af den interne blitz | |||||
| Afbrydelsestilstand | Højhastigheds-DI-signalet fra CPU-modulet kan indstilles som afbrydelsesinput, hvilket tillader op til otte inputpunkter, og afbrydelsestilstande for stigende flanke og faldende flanke kan indstilles. | |||||
Højhastigheds I/O-specifikationer
Højhastigheds input specifikationer
| Punkt | Specifcations | |
| Signalnavn | High-speed differential input | High-speed single-end input |
| Nominel input voltage |
2.5V | 24VDC (-15% — +20%, pulserende inden for 5 %) |
| Nominel input strøm |
6.8mA | 5.7mA (typisk værdi) (ved 24V DC) |
| ON nuværende | / | Mindre end 2mA |
| OFF strøm | / | Mindre end 1mA |
| Indgangsmodstand | 5400 | 2.2k0 |
| Maks. tæller hastighed |
800K pulser/s (2PH firedobbelt frekvens), 200kHz (enkelt kanal af input) | |
| 2PH input pligt forhold |
40 %. 60 % | |
| Fælles terminal | / | Der bruges én fælles terminal. |
Højhastighedsudgangsspecifikationer
| Punkt | Specifikationer |
| Signalnavn | Output (YO—Y7) |
| Output polaritet | AX7 AX7 |
| Styrekreds voltage | DC 5V-24V |
| Nominel belastningsstrøm | 100mA/punkt, 1A/COM |
| Maks. voltage drop ved ON | 0.2V (typisk værdi) |
| Lækstrøm ved OFF | Mindre end 0.1mA |
| Udgangsfrekvens | 200kHz (outputtet på 200kHz kræver, at den eksternt tilsluttede ækvivalente belastning skal være større end 12mA.) |
| Fælles terminal | Hvert ottende punkt bruger én fælles terminal. |
Note:
- Højhastigheds I/O-portene har begrænsninger på den tilladte frekvens. Hvis input- eller outputfrekvensen overstiger den tilladte værdi, kan kontrol og identifikation være unormal. Arranger I/O-portene korrekt.
- Højhastighedsdifferensindgangsgrænsefladen accepterer ikke differenstrykindgangsniveauet på mere end 7V. Ellers kan indgangskredsløbet blive beskadiget.
Programmeringssoftware introduktion og download
Introduktion til programmeringssoftware
INVTMATIC Studio er programmerbar controller-programmeringssoftware, som INVT udvikler. Det giver et åbent og fuldt integreret programmeringsudviklingsmiljø med avanceret teknologi og kraftfulde funktioner til projektudvikling, der er baseret på programmeringssprog i overensstemmelse med IEC 61131-3. Det er meget udbredt inden for energi, transport, kommunal, metallurgi, kemisk, farmaceutisk, fødevarer, tekstil, emballage, trykning, gummi og plast, værktøjsmaskiner og lignende industrier.
Løbende miljø og download
Du kan installere Invtmatic Studio på en stationær eller bærbar computer, hvoraf operativsystemet er mindst Windows 7, hukommelsesplads er mindst 2GB, ledig hardwareplads er mindst 10GB, og CPU-hovedfrekvensen er højere end 2GHz. Derefter kan du tilslutte din computer til CPU-modulet på den programmerbare controller gennem et netværkskabel og redigere brugerprogrammerne gennem Invtmatic Studio-softwaren, så du kan downloade og debugge brugerprogrammer.
Programmeringsinstans
Det følgende beskriver, hvordan man udfører programmering ved at bruge et example (AX72-C-1608N).
Først og fremmest skal du tilslutte alle hardwaremodulerne på den programmerbare controller, inklusive tilslutning af strømforsyningen til CPU-modulet, tilslutning af CPU-modulet til computeren, hvor Invtmatic Studio er installeret og til det nødvendige udvidelsesmodul, og tilslutning af EtherCAT-bussen til motordrevet. Start Invtmatic Studio for at oprette et projekt og udføre programmeringskonfiguration.
Fremgangsmåden er som følger:
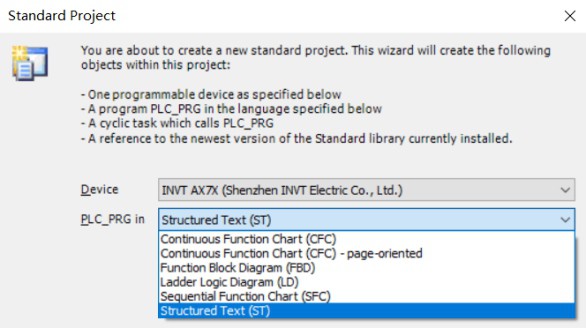
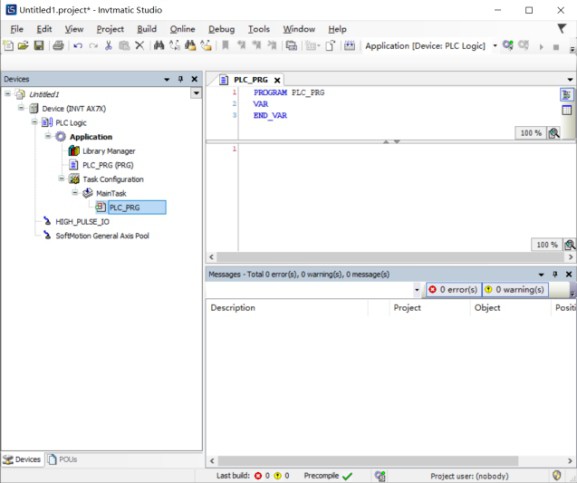
Trin 1 Vælg File > Nyt projekt, vælg standardprojekttypen, og indstil projektets gemmested og navn. Klik på OK. Vælg derefter INVT AX7X-enheden og programmeringssproget Structured Text (ST) i standardprojektkonfigurationsvinduet, der vises. CODESYS konfigurations- og programmeringsgrænsefladen vises.
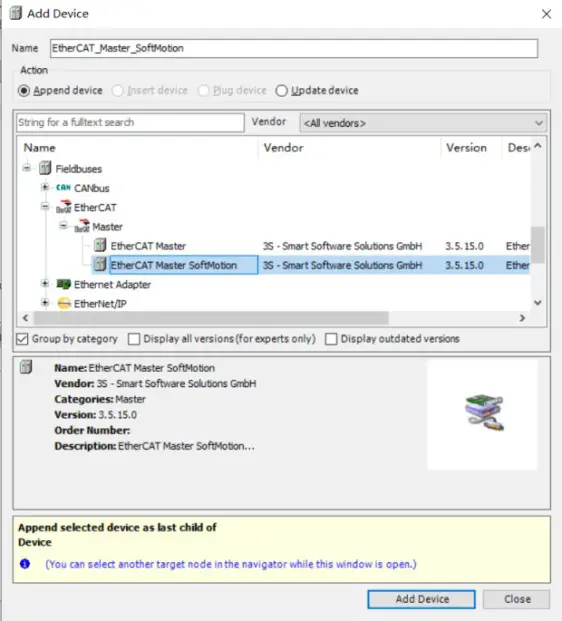
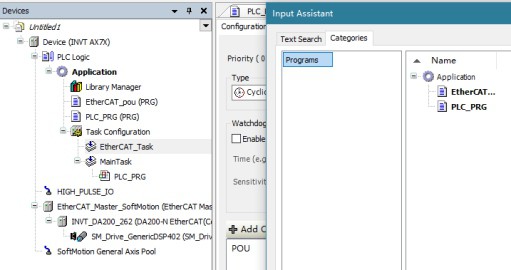
Trin 2 Højreklik på Enhedsnavigationstræet. Vælg derefter Tilføj enhed. Vælg Ether CAT Master Soft Motion.
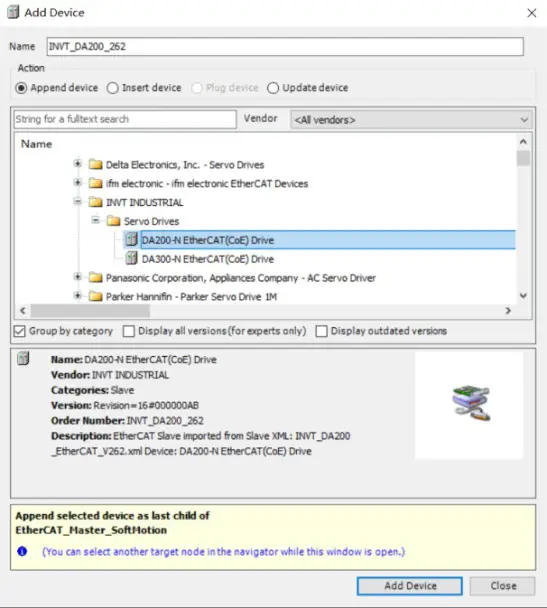
Trin 3 Højreklik EtherCAT_Master_SoftMotion i venstre navigationstræ. Vælg Tilføj enhed. Vælg DA200-N Ether CAT(CoE) Drive i det vindue, der vises.
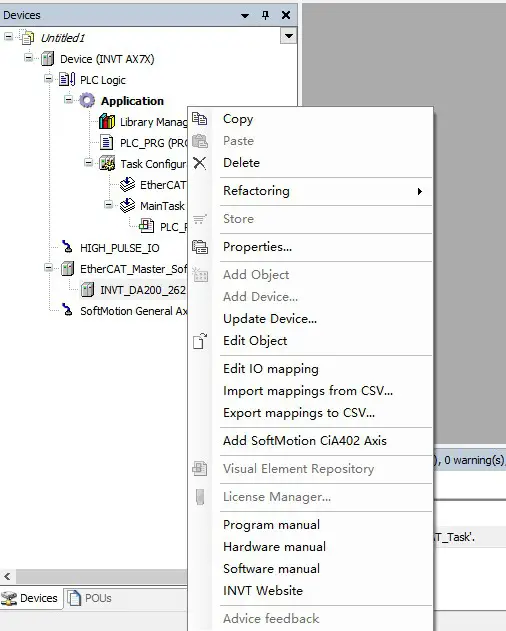
Trin 4 Vælg Tilføj SoftMotion CiA402 Axis i genvejsmenuen, der vises.
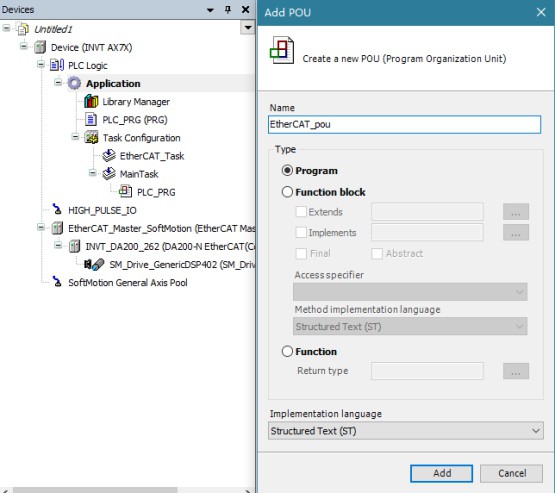
Trin 5 Højreklik på Application i venstre navigationstræ, og vælg at tilføje en EtherCAT POU. Dobbeltklik på den automatisk genererede EtherCAT_Task for at starte. Vælg den oprettede EtherCAT_pou. Skriv applikationsprogrammet baseret på applikationskontrolprocessen.
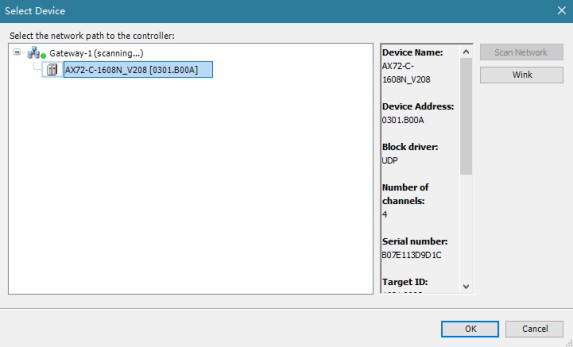
Trin 6 Dobbeltklik på enhedsnavigationstræet, klik på Scan netværk, vælg AX72-C-1608N vist i følgende figur, og klik på Wink. Klik derefter på OK hvornår
CPU-systemindikatoren blinker.
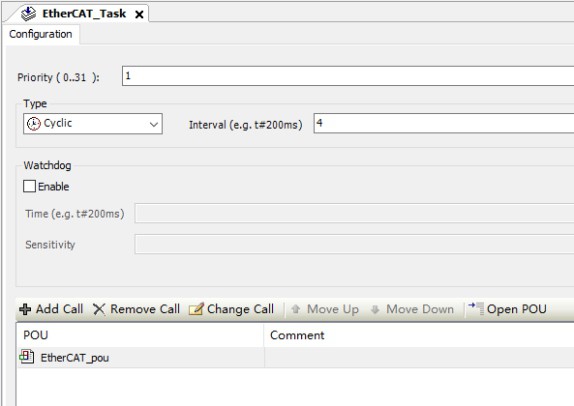
Trin 7 Dobbeltklik på EtherCAT_Task under Opgavekonfiguration i venstre rude. Indstil opgaveprioriteter og udførelsesintervaller baseret på opgavens realtidskrav.
I Invtmatic Studio kan du klikke ![]() at kompilere programmer, og du kan tjekke for fejl i henhold til logfiler. Efter at have bekræftet, at kompileringen er helt korrekt, kan du klikke
at kompilere programmer, og du kan tjekke for fejl i henhold til logfiler. Efter at have bekræftet, at kompileringen er helt korrekt, kan du klikke ![]() at logge ind og downloade brugerprogrammer til den programmerbare controller, og du kan udføre simuleringsfejlfinding.
at logge ind og downloade brugerprogrammer til den programmerbare controller, og du kan udføre simuleringsfejlfinding.
Kontrol før opstart og forebyggende vedligeholdelse
Kontrol før opstart
Hvis du har gennemført ledningsføringen, skal du sikre dig følgende, før du starter modulet til at fungere:
- Moduludgangskablerne opfylder kravene.
- Udvidelsesgrænseflader på alle niveauer er pålideligt forbundet.
- Applikationsprogrammerne bruger de korrekte betjeningsmetoder og parameterindstillinger.
Forebyggende vedligeholdelse
Udfør forebyggende vedligeholdelse som følger:
- Rengør den programmerbare controller regelmæssigt, undgå at fremmedlegemer falder ind i controlleren, og sørg for gode ventilations- og varmeafledningsforhold for controlleren.
- Formuler vedligeholdelsesinstruktioner og test regelmæssigt controlleren.
- Kontroller jævnligt ledninger og klemmer for at sikre, at de er forsvarligt fastgjort.
Yderligere information
Du er velkommen til at kontakte os for yderligere information. Angiv venligst produktmodel og serienummer, når du foretager en forespørgsel.
For at få relaterede produkt- eller serviceoplysninger kan du:
- Kontakt INVT lokalkontor.
- Besøg www.invt.com.
- Scan følgende QR -kode.

Kundeservicecenter, Shenzhen INVT Electric Co., Ltd.
Adresse: INVT Guangming Technology Building, Songbai Road, Matian, Guangming District, Shenzhen, Kina
Copyright © INVT. Alle rettigheder forbeholdes. Manuelle oplysninger kan ændres uden forudgående varsel.

202207 (V1.0)
Dokumenter/ressourcer
 |
invt AX7 Series CPU-modul [pdf] Brugsanvisning AX7-serien CPU-modul, AX7-serien, CPU-modul, modul |



