![]()
AX7 ![]() Manuale dell'utente del modulo CPU della serie
Manuale dell'utente del modulo CPU della serie
Modulo CPU serie AX7
Grazie per aver scelto il controllore programmabile della serie AX (controllore programmabile in breve).
Basato sulla piattaforma Invtmatic Studio, il controllore programmabile supporta completamente i sistemi di programmazione IEC61131-3, bus di campo in tempo reale EtherCAT, bus di campo CANopen e porte ad alta velocità e fornisce funzioni di camma elettronica, ingranaggio elettronico e interpolazione.
Il manuale descrive principalmente le specifiche, le caratteristiche, il cablaggio e i metodi di utilizzo del modulo CPU del controllore programmabile. Per assicurarti di utilizzare il prodotto in modo sicuro e corretto e di metterlo in gioco, leggi attentamente il manuale prima dell'installazione. Per i dettagli sugli ambienti di sviluppo del programma utente e sui metodi di progettazione del programma utente, consultare il Manuale dell'utente dell'hardware del controller programmabile serie AX e il Manuale dell'utente del software del controller programmabile serie AX che pubblichiamo.
Il manuale è soggetto a modifiche senza preavviso. Per favore visita http://www.invt.com per scaricare l'ultima versione del manuale.
Precauzioni di sicurezza
Avvertimento
| Simbolo | Nome | Descrizione | Abbreviazione |
| Pericolo |
Pericolo | Se non vengono rispettati i relativi requisiti, possono verificarsi gravi lesioni personali o addirittura la morte. | |
| Avvertimento |
Avvertimento | Se non vengono seguiti i relativi requisiti, possono verificarsi lesioni personali o danni alle apparecchiature. |
Consegna e installazione
| • Solo professionisti addestrati e qualificati possono eseguire l'installazione, il cablaggio, la manutenzione e l'ispezione. • Non installare il controllore programmabile su materiali infiammabili. Inoltre, evitare che il controllore programmabile entri in contatto o aderisca a materiali infiammabili. • Installare il controllore programmabile in un armadio di controllo con serratura di almeno IP20, che impedisca al personale senza conoscenze relative alle apparecchiature elettriche di toccarlo per errore, poiché l'errore potrebbe causare danni all'apparecchiatura o scosse elettriche. Solo il personale che ha ricevuto le relative conoscenze elettriche e la formazione sul funzionamento delle apparecchiature può utilizzare l'armadio di controllo. • Non far funzionare il controllore programmabile se è danneggiato o incompleto. • Non contattare il controllore programmabile con damp oggetti o parti del corpo. In caso contrario, potrebbero verificarsi scosse elettriche. |
Selezione del cavo
| • Solo professionisti addestrati e qualificati possono eseguire l'installazione, il cablaggio, la manutenzione e l'ispezione. • Comprendere appieno i tipi di interfaccia, le specifiche ei relativi requisiti prima del cablaggio. In caso contrario, causerà un cablaggio errato marcia anomala. • Interrompere tutte le alimentazioni collegate al controllore programmabile prima di eseguire il cablaggio. • Prima dell'accensione per il funzionamento, assicurarsi che ogni copriterminale del modulo sia installato correttamente in posizione dopo che l'installazione e il cablaggio sono stati completati. Ciò impedisce che un terminale attivo venga toccato. In caso contrario, potrebbero verificarsi lesioni fisiche, guasti alle apparecchiature o malfunzionamenti. • Installare componenti o dispositivi di protezione adeguati quando si utilizzano alimentatori esterni per il controllore programmabile. Ciò impedisce che il controllore programmabile venga danneggiato a causa di guasti dell'alimentazione esterna, overvoltage, sovracorrente o altre eccezioni. |
Messa in servizio e funzionamento
| • Prima dell'accensione per il funzionamento, assicurarsi che l'ambiente di lavoro del controllore programmabile soddisfi i requisiti, il cablaggio sia corretto, le specifiche dell'alimentazione in ingresso soddisfino i requisiti e che sia stato progettato un circuito di protezione per proteggere il controllore programmabile in modo che il controllore programmabile il controller può funzionare in sicurezza anche se si verifica un guasto del dispositivo esterno. • Per i moduli oi terminali che richiedono un'alimentazione esterna, configurare dispositivi di sicurezza esterni come fusibili o interruttori automatici per evitare danni causati dall'alimentazione esterna o da guasti del dispositivo. |
Manutenzione e sostituzione componenti
| • Solo professionisti addestrati e qualificati possono eseguire la manutenzione, l'ispezione e la sostituzione dei componenti per il controllore programmabile. • Interrompere tutte le alimentazioni collegate al controllore programmabile prima del cablaggio dei terminali. • Durante la manutenzione e la sostituzione dei componenti, adottare misure per evitare che viti, cavi e altri materiali conduttivi cadano all'interno del controllore programmabile. |
Disposizione
| Il controller programmabile contiene metalli pesanti. Smaltire un controller programmabile di scarto come rifiuto industriale. | |
| Smaltire un prodotto di scarto separatamente in un punto di raccolta appropriato ma non collocarlo nel normale flusso dei rifiuti. |
Introduzione al prodotto
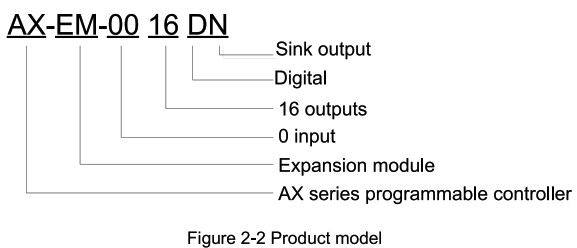
Modello e targa
Funzione finitaview
Come modulo di controllo principale del controllore programmabile, il modulo CPU AX7J-C-1608L] (modulo CPU in breve) ha le seguenti funzioni:
- Realizza il controllo, il monitoraggio, l'elaborazione dei dati e la comunicazione di rete per il sistema in esecuzione.
- Supporta i linguaggi di programmazione IL, ST, FBD, LD, CFC e SFC conformi agli standard IEC61131-3 utilizzando la piattaforma Invtmatic Studio che INVT ha lanciato per la programmazione.
- Supporta 16 moduli di espansione locali (come I/O, temperatura e moduli analogici).
- Utilizza Ether CAT o CAN open bus per collegare i moduli slave, ognuno dei quali supporta 16 moduli di espansione (come I/O, temperatura e moduli analogici).
- Supporta il protocollo master/slave Modbus TCP.
- Integra due interfacce RS485, supportando il protocollo Modbus RTU master/slave.
- Supporta I/O ad alta velocità, 16 ingressi ad alta velocità e 8 uscite ad alta velocità.
- Supporta il controllo del movimento del bus di campo EtherCAT con tempo di sincronizzazione di 1 ms, 2 ms, 4 ms o 8 ms.
- Supporta il controllo del movimento ad asse singolo o multiplo basato su impulsi, inclusa l'interpolazione lineare a 2-4 assi e l'interpolazione ad arco a 2 assi.
- Supporta l'orologio in tempo reale.
- Supporta la protezione dei dati in caso di interruzione di corrente.
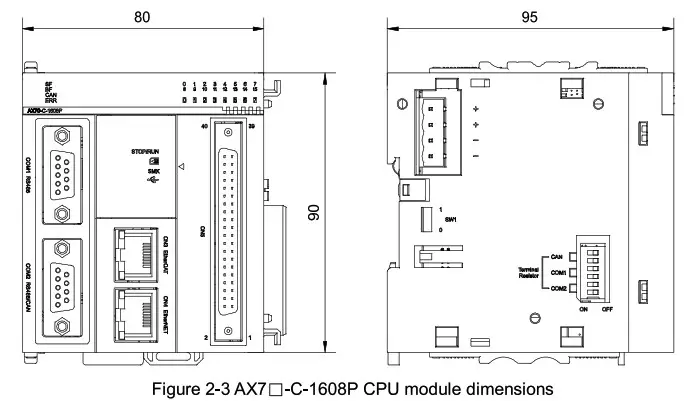
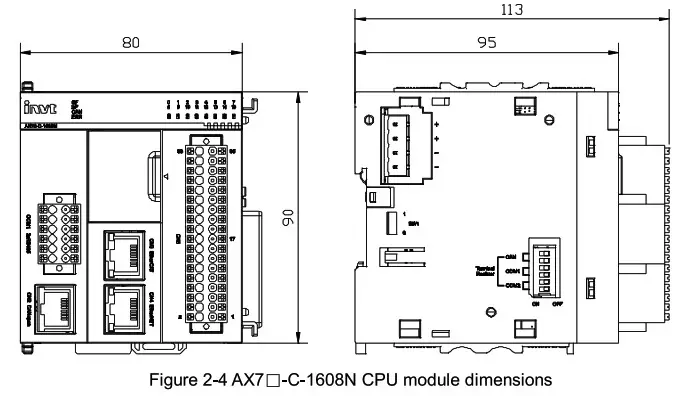
Dimensioni strutturali
Le dimensioni strutturali (unità: mm) sono mostrate nella figura seguente.
Interfaccia
Descrizione dell'interfaccia
Distribuzione dell'interfaccia
La Figura 3-1 e la Figura 3-2 mostrano la distribuzione dell'interfaccia del modulo CPU. Per ogni interfaccia è fornita accanto una rispettiva serigrafia descrittiva, che facilita il cablaggio, il funzionamento e il controllo.
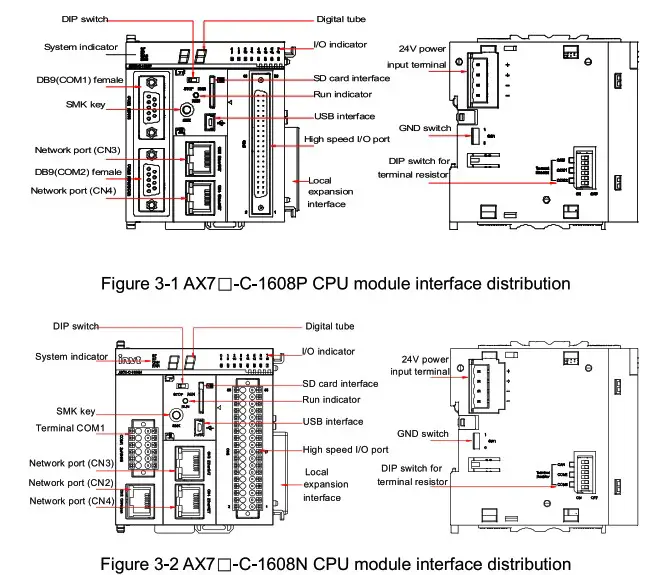
| Interfaccia | Funzione | |
| Interruttore DIP | DIP switch MARCIA/ARRESTO. | |
| Indicatore di sistema | SF: Indicatore di guasto del sistema. BF: Indicatore di guasto bus. CAN: Indicatore di errore del bus CAN. ERR: Indicatore di guasto del modulo. |
|
| Chiave SMK | Chiave intelligente SMK. | |
| WO-C-1608P | COM1 (DB9) femmina |
Un'interfaccia RS485, che supporta Modbus RTU protocollo master/slave. |
| COM2 (DB9) femmina |
Un'interfaccia RS485 e l'altra interfaccia CAN L'interfaccia RS485 supporta il protocollo master/slave Modbus RTU e l'altra interfaccia CAN supporta il protocollo master/slave CANopen. |
|
| AX70-C-1608N | COM1 e COM2 (terminale push-in n) | Due interfacce RS485, che supportano Modbus RTU protocollo master/slave. |
| CN2 (RJ45) | Interfaccia CAN, che supporta il protocollo CAN open master/slave. | |
| CN3 (RJ45) | Interfaccia Ether CAT | |
| CN4 (RJ45) | 1. Protocollo Modbus TCP 2. Funzioni Ethernet standard 3.Download e debug del programma utente (solo con IPv4) |
|
| Tubo digitale | Visualizza gli allarmi e le risposte alla pressione del tasto SMK. | |
| Indicatore I/O | Indica se i segnali di 16 ingressi e 8 uscite sono validi. | |
| Interfaccia SD card | Utilizzato per memorizzare programmi utente e dati. | |
| Indicatore di corsa | Indica se il modulo CPU è in esecuzione. | |
| Interfaccia USB | Utilizzato per scaricare ed eseguire il debug dei programmi. | |
| I/O ad alta velocità | 16 ingressi ad alta velocità e 8 uscite ad alta velocità. | |
| Interfaccia di espansione locale | Supporta l'espansione di 16 moduli I/O, non consentendo l'hot swapping. | |
| Interfaccia di alimentazione 24V | DC 24V volumetage ingresso | |
| Interruttore di messa a terra | Interruttore di collegamento tra la terra digitale interna del sistema e la terra dell'alloggiamento. Di default è disconnesso (SW1 è impostato su 0). Viene utilizzato solo in scenari speciali in cui la terra digitale interna del sistema viene presa come piano di riferimento. Prestare attenzione prima di utilizzarlo. In caso contrario, la stabilità del sistema ne risente. | |
| DIP switch della resistenza terminale | ON indica il collegamento del resistore terminale (è OFF per impostazione predefinita). COM1 corrisponde a RS485-1, COM2 corrisponde a RS485-2 e CAN corrisponde a CAN. | |
Chiave SMK
La chiave SMK viene utilizzata principalmente per reimpostare l'indirizzo IP del modulo CPU (rP) e cancellare i programmi applicativi (cA). L'indirizzo predefinito del modulo CPU è 192.168.1.10. Se desideri ripristinare l'indirizzo predefinito da un indirizzo IP modificato, puoi ripristinare l'indirizzo predefinito tramite la chiave SMK. Il metodo è il seguente:
- Portare il modulo CPU nello stato STOP. Premere il tasto SMK. Quando il tubo digitale visualizza "rP", tenere premuto il tasto SMK. Quindi il tubo digitale visualizza "rP" e si spegne alternativamente, indicando che è in corso il ripristino dell'indirizzo IP. L'operazione di ripristino ha esito positivo quando il tubo digitale è spento. Se si rilascia il tasto SMK in questo momento, il tubo digitale visualizza "rP". Tenere premuto il tasto SMK fino a quando il tubo visualizza "00" (rP—cA—rU-rP).
- Se si rilascia il tasto SMK durante il processo in cui il tubo digitale visualizza "rP" e si spegne alternativamente, l'operazione di reimpostazione dell'indirizzo IP viene annullata e il tubo digitale visualizza "rP".
Per cancellare un programma dal modulo CPU, procedere come segue:
Premere il tasto SMK. Quando il tubo digitale visualizza "cA", tenere premuto il tasto SMK. Quindi il tubo digitale visualizza "rP" e si spegne alternativamente, indicando che il programma viene cancellato. Quando il tubo digitale è spento, riavviare il modulo CPU. Il programma è stato cancellato correttamente.
Descrizione del tubo digitale
- Se i programmi non presentano errori dopo il download, il tubo digitale del modulo CPU visualizza "00" costantemente.
- Se un programma presenta un errore, il tubo digitale visualizza le informazioni sull'errore in modo lampeggiante.
- Per esempioample, se si verifica solo l'errore 19, il tubo digitale visualizza "19" e si spegne alternativamente. Se l'errore 19 e l'errore 29 si verificano contemporaneamente, il tubo digitale visualizza "19", si spegne, visualizza "29" e si spegne alternativamente. Se si verificano più guasti contemporaneamente, la modalità di visualizzazione è simile.
Definizione terminale
AX7![]() -C-1608P Definizione terminale di comunicazione COM1/COM2
-C-1608P Definizione terminale di comunicazione COM1/COM2
Per il modulo CPU AX7LJ-C-1608P, COM1 è il terminale di comunicazione RS485 e COM2 è il terminale di comunicazione RS485/CAN, entrambi utilizzano un connettore DB9 per la trasmissione dei dati. Le interfacce e i pin sono descritti di seguito.
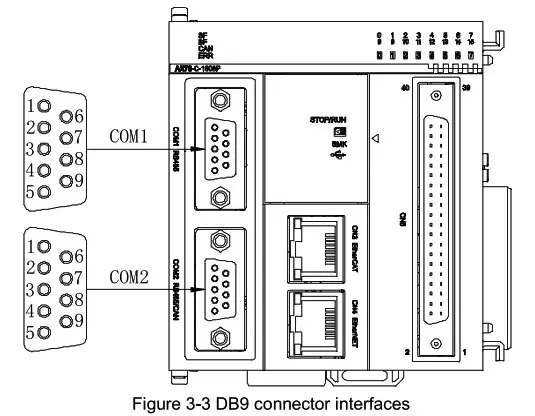
Tabella 3-1 Pin del connettore COM1/COM2 DB39
| Interfaccia | Distribuzione | Spillo | Definizione | Funzione |
| COM1 (RS485) |
1 | / | / | |
| 2 | / | / | ||
| 3 | / | / | ||
| 4 | RS485A | Segnale differenziale RS485 + | ||
| 5 | Modello RS485B | Segnale differenziale RS485 – | ||
| 6 | / | / | ||
| 7 | / | / | ||
| 8 | / | / | ||
| 9 | GND_RS485 | Massa alimentazione RS485 | ||
| COM2 (RS485/CAN) |
1 | / | / | |
| 2 | POSSO | Segnale differenziale CAN – | ||
| 3 | / | / | ||
| 4 | RS485A | Segnale differenziale RS485 + | ||
| 5 | Modello RS485B | Segnale differenziale RS485 – | ||
| 6 | GND_CAN | Messa a terra dell'alimentazione CAN | ||
| 7 | PU _H | Segnale differenziale CAN + | ||
| 8 | / | / | ||
| 9 | GND_RS485 | Massa alimentazione RS485 |
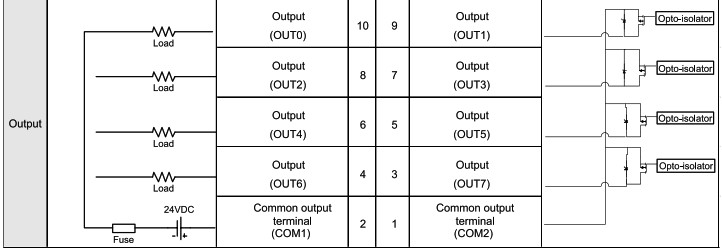
AX7![]() -Definizione terminale I/O ad alta velocità C-1608P
-Definizione terminale I/O ad alta velocità C-1608P
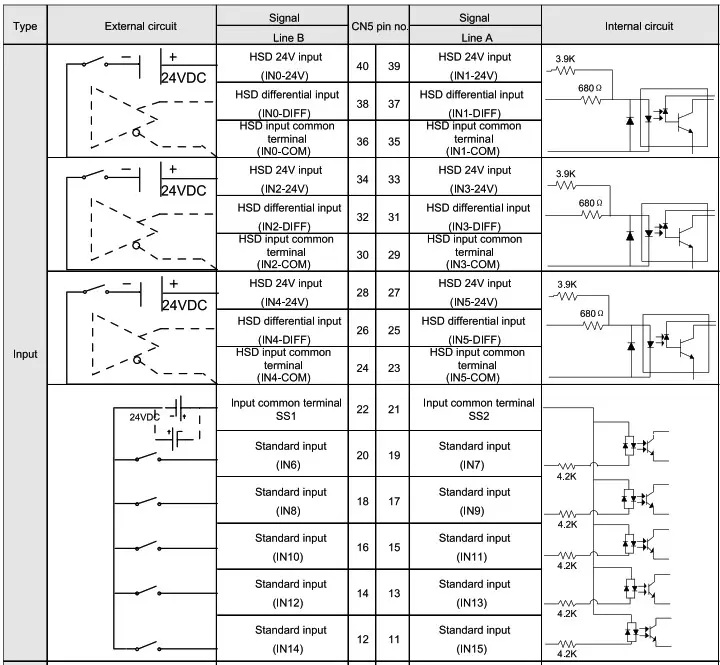
AX7![]() -Il modulo CPU C-1608P ha 16 ingressi ad alta velocità e 8 uscite ad alta velocità. Le interfacce e i pin sono descritti di seguito.
-Il modulo CPU C-1608P ha 16 ingressi ad alta velocità e 8 uscite ad alta velocità. Le interfacce e i pin sono descritti di seguito.
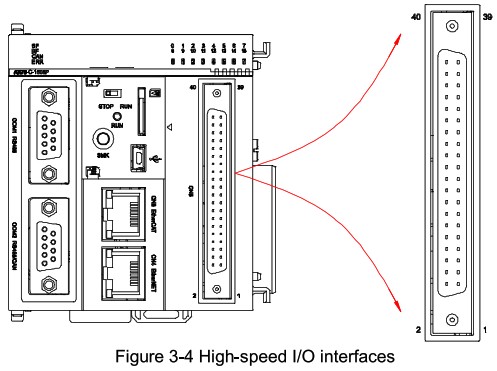
Tabella 3-2 Pin I/O ad alta velocità
AX7![]() -C-1608N Definizione terminale di comunicazione COM1/CN2
-C-1608N Definizione terminale di comunicazione COM1/CN2
Per AX7![]() -C-1608N Modulo CPU, COM1 è il terminale di comunicazione RS485 a due canali, che utilizza un connettore push-in a 12 pin per la trasmissione dei dati. CN2 è il terminale di comunicazione CAN, utilizza il connettore RJ45 per la trasmissione dei dati. Le interfacce e i pin sono descritti di seguito.
-C-1608N Modulo CPU, COM1 è il terminale di comunicazione RS485 a due canali, che utilizza un connettore push-in a 12 pin per la trasmissione dei dati. CN2 è il terminale di comunicazione CAN, utilizza il connettore RJ45 per la trasmissione dei dati. Le interfacce e i pin sono descritti di seguito.

Tabella 3-3 Pin del connettore COM1/CN2
| Funzioni del terminale push-in di COM1 | ||||
| Definizione | Funzione | Spillo | ||
| COM1RS485 | A | Segnale differenziale RS485 + |
12 | |
| B | Segnale differenziale RS485 – | 10 | ||
| Terra | Potenza del chip RS485 _1 terra |
8 | ||
| PE | Scudo a terra | 6 | ||
| COM2RS485 | A | Segnale differenziale RS485 + |
11 | |
| B | Segnale differenziale RS485 – | 9 | ||
| Terra | Potenza del chip RS485_2 terra |
7 | ||
| PE | Scudo a terra | 5 | ||
| Nota: i pin 1-4 non vengono utilizzati. | ||||
| Funzioni dei pin di CN2 | ||||
| Definizione | Funzione | Spillo | ||
| CANopen | Terra | Messa a terra dell'alimentazione CAN | 1 | |
| POSSO | Segnale differenziale CAN – | 7 | ||
| CAN_H | Segnale differenziale CAN + | 8 | ||
| Nota: i pin 2-6 non vengono utilizzati. | ||||
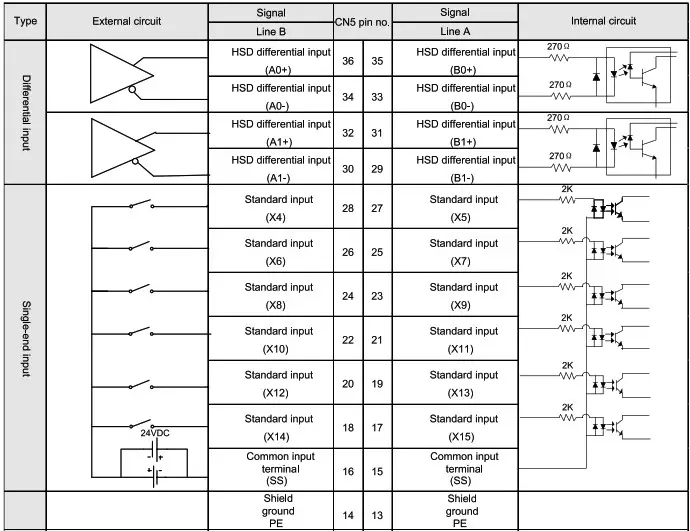
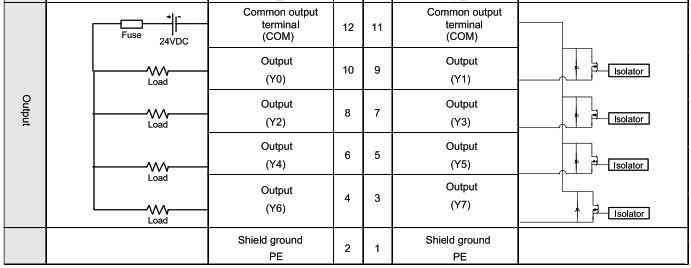
AX7![]() -C-1608N definizione terminale I/O ad alta velocità
-C-1608N definizione terminale I/O ad alta velocità
AX7![]() Il modulo CPU 1-C-1608N ha 16 ingressi ad alta velocità e 8 uscite ad alta velocità. La figura seguente mostra la distribuzione dei morsetti e la tabella seguente elenca i pin.
Il modulo CPU 1-C-1608N ha 16 ingressi ad alta velocità e 8 uscite ad alta velocità. La figura seguente mostra la distribuzione dei morsetti e la tabella seguente elenca i pin.
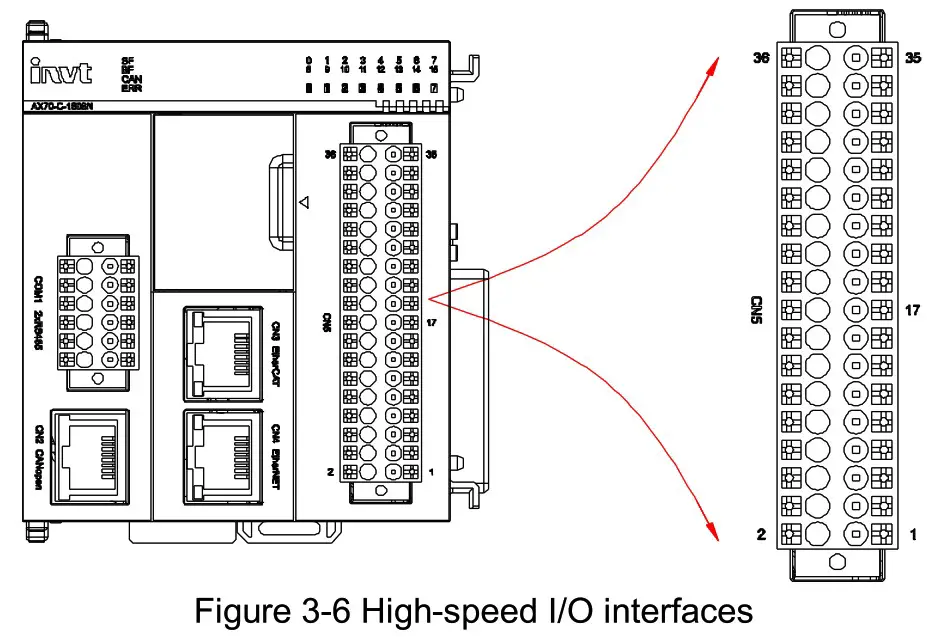
Tabella 3-4 Pin I/O ad alta velocità
Nota:
- Tutti i 16 canali di ingresso di AX7
 -Il modulo CPU C-1608P consente l'ingresso ad alta velocità, ma i primi 6 canali supportano l'ingresso single-end o differenziale a 24 V e gli ultimi 10 canali supportano l'ingresso single-end a 24 V.
-Il modulo CPU C-1608P consente l'ingresso ad alta velocità, ma i primi 6 canali supportano l'ingresso single-end o differenziale a 24 V e gli ultimi 10 canali supportano l'ingresso single-end a 24 V. - Tutti i 16 canali di ingresso di AX7Il modulo CPU -C-1608N consente l'ingresso ad alta velocità, ma i primi 4 canali supportano l'ingresso differenziale e gli ultimi 12 canali supportano l'ingresso single-end a 24 V.
- Ogni punto I/O è isolato dal circuito interno.
- La lunghezza totale del cavo di collegamento della porta I/O ad alta velocità non può superare i 3 metri.
- Non piegare i cavi durante il fissaggio dei cavi.
- Durante il passaggio dei cavi, separare i cavi di collegamento dai cavi di alta potenza che causano forti interferenze ma non legare tra loro i cavi di collegamento con questi ultimi. Inoltre, evitare l'instradamento parallelo a lunga distanza.
Installazione del modulo
Grazie al design modulare, il controllore programmabile è facile da installare e mantenere. Come per il modulo CPU, i principali oggetti di connessione sono i moduli di alimentazione e di espansione.
I moduli sono collegati utilizzando le interfacce di connessione fornite dal modulo e gli innesti a scatto.
La procedura di montaggio è la seguente:
| Passaggio 1 Far scorrere il fissaggio a scatto sul modulo CPU nella direzione mostrata nella figura seguente (utilizzando il modulo di alimentazione collegamento per esample). |
Passaggio 2 Allineare il modulo CPU con il connettore del modulo di alimentazione per l'interblocco. |
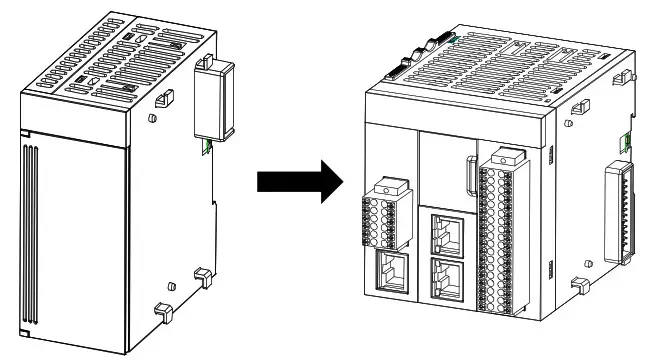 |
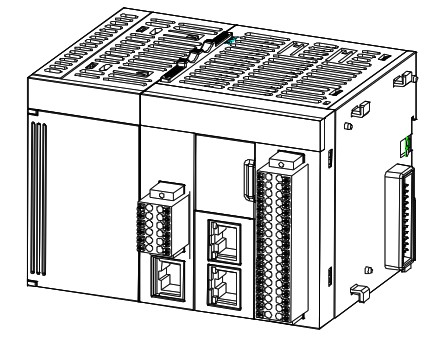 |
| Passaggio 3 Far scorrere la chiusura a scatto sul modulo CPU nella direzione mostrata nella figura seguente per collegare e bloccare i due moduli. | Passaggio 4 Come per l'installazione su guida DIN standard, agganciare il rispettivo modulo nella guida di installazione standard fino a quando l'innesto a scatto non scatta in posizione. |
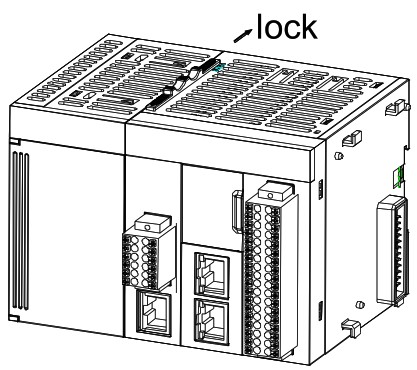 |
 |
Collegamento dei cavi e specifiche
Connessione bus CAT via etere
Specifiche del bus Ether CAT
| Articolo | Descrizione |
| Protocollo di comunicazione | Etere CAT |
| Servizio supportato | COE (DOP/SDO) |
| min. intervallo di sincronizzazione | 1 ms/4 assi (valore tipico) |
| Metodo di sincronizzazione | CC per sincronizzazione/CC inutilizzato |
| Strato fisico | 100BASE-TX |
| Modalità duplex | Doppio-duplex completo |
| Struttura della topologia | Collegamento seriale |
| Mezzo di trasmissione | Cavo di rete (vedere la sezione "Selezione del cavo") |
| Distanza di trasmissione | Meno di 100 m tra due nodi |
| Numero di nodi slave | Fino a 125 |
| Lunghezza del frame Ether CAT | 44 byte-1498 byte |
| Dati di processo | Fino a 1486 byte contenuti in un singolo frame |
Selezione del cavo
Il modulo CPU può implementare la comunicazione bus Ether CAT attraverso la porta CN3. Si consigliano cavi standard INVT. Se si realizzano autonomamente i cavi di comunicazione, verificare che i cavi soddisfino i seguenti requisiti:
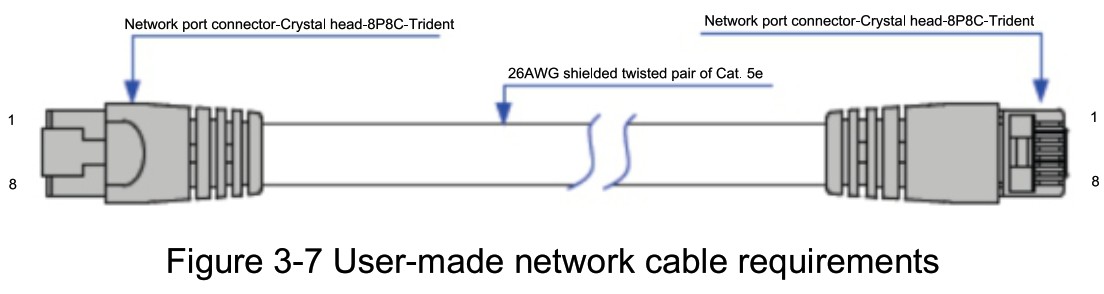
Nota:
- I cavi di comunicazione utilizzati devono superare il test di conducibilità al 100%, senza cortocircuito, circuito aperto, dislocazione o contatto scadente.
- Per garantire la qualità della comunicazione, la lunghezza del cavo di comunicazione EtherCAT non può superare i 100 metri.
- Si consiglia di realizzare i cavi di comunicazione utilizzando cavi schermati a doppino intrecciato di categoria 5e, conformi a EIA/TIA568A, EN50173, ISO/IEC11801, EIA/TIA bollettino TSB e EIA/TIA SB40-A&TSB36.
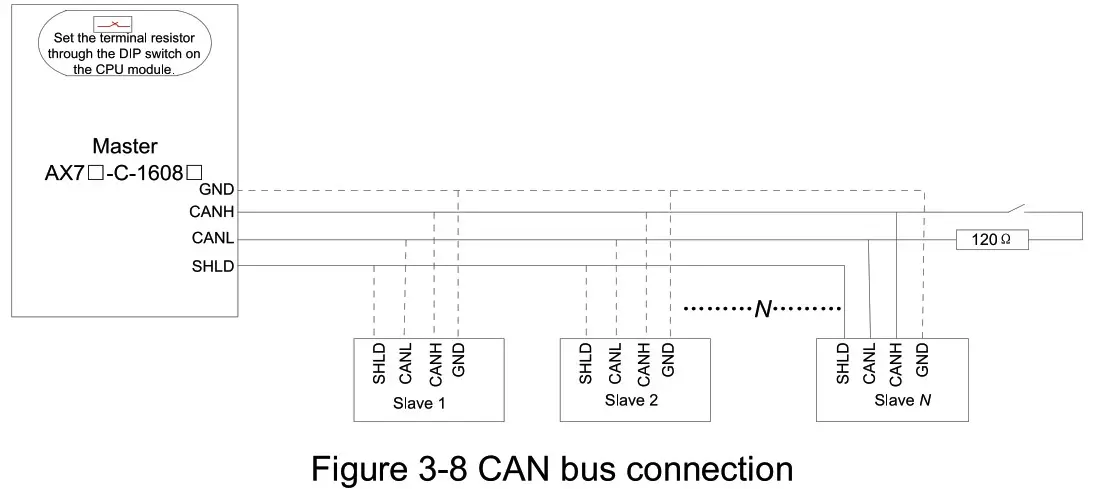
Connessione via cavo CAN open
Fare rete
La struttura della topologia di connessione del bus CAN è illustrata nella figura seguente. Si consiglia di utilizzare il doppino intrecciato schermato per la connessione del bus CAN. Ciascuna estremità del bus CAN si collega a un resistore terminale da 1200 per impedire la riflessione del segnale. Nella maggior parte dei casi, lo strato di schermatura utilizza la messa a terra a punto singolo.
Selezione del cavo
- Per AX7-C-1608P Modulo CPU, lo stesso terminale viene utilizzato sia per la comunicazione CANopen che per la comunicazione RS485, utilizzando un connettore DB9 per la trasmissione dei dati. I pin nel connettore DB9 sono stati descritti in precedenza.
- Per AX7Modulo CPU 1-C-1608N, il terminale RJ45 viene utilizzato per la comunicazione CANopen per la trasmissione dei dati. I pin nel connettore RJ45 sono stati descritti in precedenza.
Si consigliano cavi standard INVT. Se si realizzano i cavi di comunicazione da soli, realizzare i cavi in base alla descrizione dei pin e assicurarsi che il processo di produzione e i parametri tecnici soddisfino i requisiti di comunicazione.
Nota:
- Per migliorare la capacità anti-interferenza del cavo, si consiglia di utilizzare tecniche di schermatura con foglio di alluminio e treccia di alluminio-magnesio durante la realizzazione dei cavi.
- Utilizzare la tecnica dell'avvolgimento a doppino intrecciato per i cavi differenziali.
Connessione di comunicazione seriale RS485
Il modulo CPU supporta 2 canali di comunicazione RS485.
- Per AX7-C-1608P Modulo CPU, le porte COM1 e COM2 utilizzano il connettore DB9 per la trasmissione dei dati. I pin nel connettore DB9 sono stati descritti in precedenza.
- Per AX7-C-1608N Modulo CPU, la porta utilizza il connettore terminale push-in a 12 pin per la trasmissione dei dati. I pin nel connettore del terminale sono stati descritti in precedenza.
Si consigliano cavi standard INVT. Se si realizzano i cavi di comunicazione da soli, realizzare i cavi in base alla descrizione dei pin e assicurarsi che il processo di produzione e i parametri tecnici soddisfino i requisiti di comunicazione.
Nota:
- Per migliorare la capacità anti-interferenza del cavo, si consiglia di utilizzare tecniche di schermatura con foglio di alluminio e treccia di alluminio-magnesio durante la realizzazione dei cavi.
- Utilizzare la tecnica dell'avvolgimento a doppino intrecciato per i cavi differenziali.
Connessione Ethernet
Fare rete
La porta Ethernet del modulo CPU è CN4, che può connettersi a un altro dispositivo come un computer o un dispositivo HMI utilizzando un cavo di rete in modalità punto a punto.
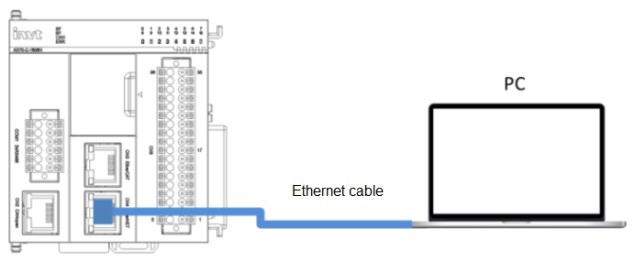
Figura 3-9 Connessione Ethernet
È inoltre possibile collegare la porta Ethernet a un hub o switch utilizzando un cavo di rete, implementando la connessione multipunto.

Figura 3-10Rete Ethernet
Selezione del cavo
Per migliorare l'affidabilità della comunicazione, utilizzare cavi schermati a doppino intrecciato di categoria 5 o superiore come cavi Ethernet. Si consigliano cavi standard INVT.
Istruzioni per l'uso
Parametri tecnici
Specifiche generali del modulo CPU
| Articolo | Descrizione | |||||
| Ingresso voltage | 24 V CC | |||||
| Consumo energetico | < 15W | |||||
| Mancanza di corrente tempo di protezione |
300 ms (nessuna protezione entro 20 secondi dall'accensione) | |||||
| Batteria tampone del orologio in tempo reale |
Supportato | |||||
| Alimentazione bus backplane fornitura |
5V/2.5A | |||||
| Metodo di programmazione | Linguaggi di programmazione IEC 61131-3 (LD, FBD, IL, ST, SFC, e CFC) |
|||||
| Esecuzione del programma metodo |
Locale in linea | |||||
| Memorizzazione del programma utente spazio |
10 MB | |||||
| Spazio di memoria flash per mancanza di corrente protezione |
512KB | |||||
| Scheda SD specifiche |
Micro SD da 32 GB | |||||
| Elementi morbidi e caratteristiche |
||||||
| Elemento | Nome | Contare | Caratteristiche di stoccaggio | |||
| Predefinito | Scrivibile | Descrizione | ||||
| I | Relè di ingresso | 64KParola | Non salvare | NO | X: 1 bit B. 8 bit W: 16 bit D: 32 bit L: 64 bit | |
| Q | Relè di uscita | 64KParola | Non salvare | NO | ||
| M | Uscita ausiliaria | 256KParola | Salva | SÌ | ||
| Conservazione del programma metodo al potere fallimento |
Ritenzione tramite il flash interno | |||||
| Modalità di interruzione | Il segnale DI ad alta velocità del modulo CPU può essere impostato come ingresso di interruzione, consentendo fino a otto punti di ingresso, ed è possibile impostare le modalità di interruzione del fronte di salita e del fronte di discesa. | |||||
Specifiche I/O ad alta velocità
Specifiche di ingresso ad alta velocità
| Articolo | Specifiche | |
| Nome del segnale | Ingresso differenziale ad alta velocità | Ingresso single-end ad alta velocità |
| Ingresso nominale volumetage |
2.5 V | 24VDC (-15% — +20%, pulsante entro il 5%) |
| Ingresso nominale attuale |
6.8mA | 5.7 mA (valore tipico) (a 24 V CC) |
| Corrente ON | / | Meno di 2 mA |
| OFF corrente | / | Meno di 1 mA |
| Resistenza di ingresso | 5400 | 2.2k0 |
| Massimo. conteggio velocità |
800K impulsi/s (frequenza quadrupla 2PH), 200kHz (singolo canale di ingresso) | |
| Servizio di ingresso 2PH rapporto |
40%. 60% | |
| Terminale comune | / | Viene utilizzato un terminale comune. |
Specifiche di uscita ad alta velocità
| Articolo | Specifiche |
| Nome del segnale | Uscita (YO—Y7) |
| Polarità di uscita | AX7 AX7 |
| Circuito di controllo voltage | CC 5V-24V |
| Corrente di carico nominale | 100mA/punto, 1A/COM |
| Massimo volumetage cadere su ON | 0.2 V (valore tipico) |
| Corrente di dispersione su OFF | Meno di 0.1 mA |
| Frequenza di uscita | 200kHz (L'uscita di 200kHz richiede che il carico equivalente collegato esternamente sia maggiore di 12mA.) |
| Terminale comune | Ogni otto punti usa un terminale comune. |
Nota:
- Le porte I/O ad alta velocità hanno restrizioni sulla frequenza consentita. Se la frequenza di ingresso o di uscita supera il valore consentito, il controllo e l'identificazione potrebbero risultare anomali. Disporre correttamente le porte I/O.
- L'interfaccia di ingresso differenziale ad alta velocità non accetta il livello di ingresso della pressione differenziale superiore a 7V. In caso contrario, il circuito di ingresso potrebbe essere danneggiato.
Introduzione e download del software di programmazione
Introduzione al software di programmazione
INVTMATIC Studio è un software di programmazione per controllori programmabili sviluppato da INVT. Fornisce un ambiente di sviluppo di programmazione aperto e completamente integrato con tecnologia avanzata e potenti funzioni per lo sviluppo di progetti basato su linguaggi di programmazione conformi a IEC 61131-3. È ampiamente utilizzato nei settori energetico, dei trasporti, municipale, metallurgico, chimico, farmaceutico, alimentare, tessile, degli imballaggi, della stampa, della gomma e della plastica, delle macchine utensili e simili.
Ambiente in esecuzione e download
Puoi installare Invtmatic Studio su un computer desktop o portatile, di cui il sistema operativo è almeno Windows 7, lo spazio di memoria è di almeno 2 GB, lo spazio hardware libero è di almeno 10 GB e la frequenza principale della CPU è superiore a 2 GHz. Quindi è possibile collegare il computer al modulo CPU del controllore programmabile tramite un cavo di rete e modificare i programmi utente tramite il software Invtmatic Studio in modo da poter scaricare ed eseguire il debug dei programmi utente.
Istanza di programmazione
Di seguito viene descritto come eseguire la programmazione utilizzando un example (AX72-C-1608N).
Prima di tutto, collegare tutti i moduli hardware del controllore programmabile, compreso il collegamento dell'alimentazione al modulo CPU, collegare il modulo CPU al computer su cui è stato installato Invtmatic Studio e al modulo di espansione richiesto e collegare il bus EtherCAT a l'azionamento del motore. Avvia Invtmatic Studio per creare un progetto ed eseguire la configurazione della programmazione.
La procedura è la seguente:
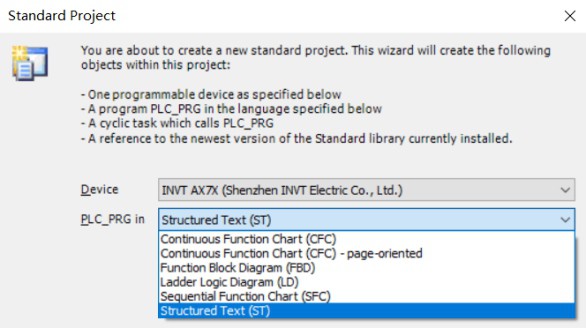
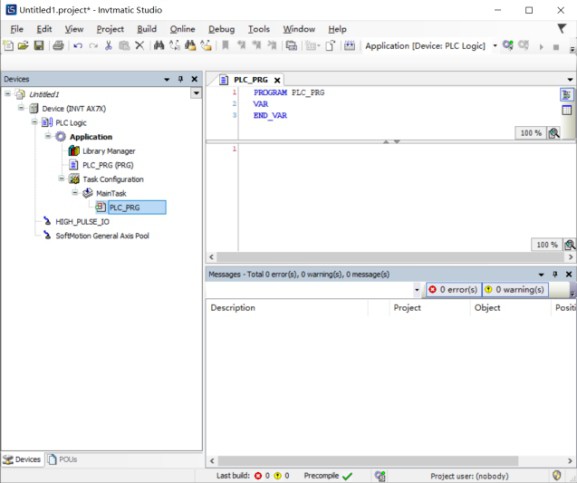
Passaggio 1 Scegli File > Nuovo progetto, selezionare il tipo di progetto standard e impostare la posizione e il nome di salvataggio del progetto. Fare clic su OK. Seleziona quindi il dispositivo INVT AX7X e il linguaggio di programmazione Structured Text (ST) nella finestra standard di configurazione del progetto che compare. Viene visualizzata l'interfaccia di configurazione e programmazione CODESYS.
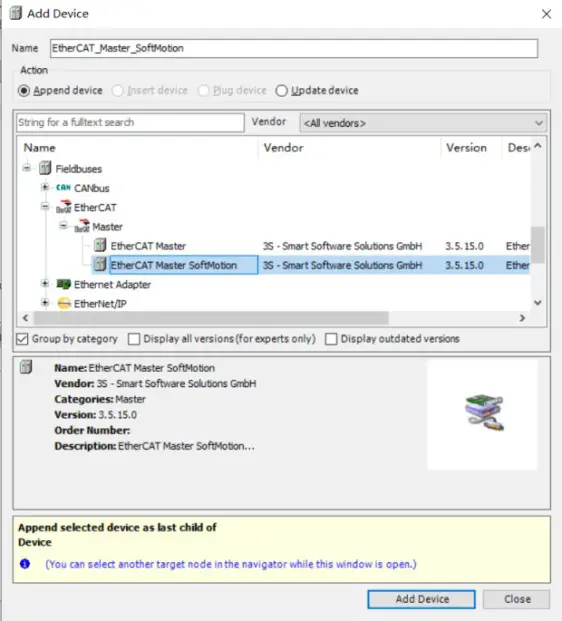
Passaggio 2 Fare clic con il pulsante destro del mouse sulla struttura di navigazione del dispositivo. Quindi scegli Aggiungi dispositivo. Scegli Ether CAT Master Soft Motion.
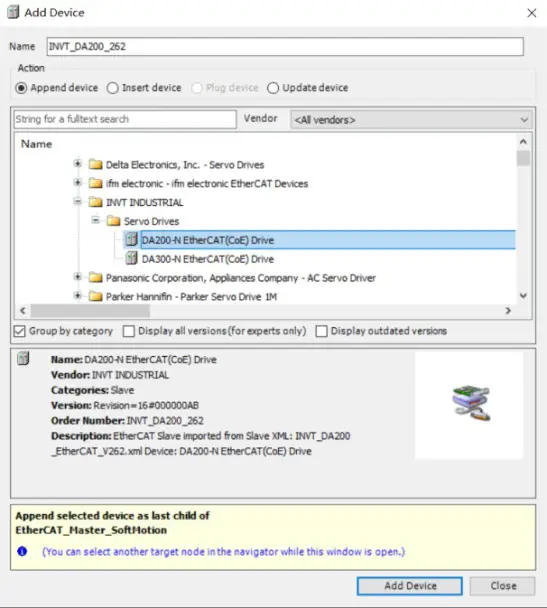
Passaggio 3 Fare clic con il pulsante destro del mouse EtherCAT_Master_SoftMotion nell'albero di navigazione a sinistra. Scegli Aggiungi dispositivo. Scegli DA200-N Ether CAT(CoE) Drive nella finestra che appare.
Passaggio 4 Scegliere Aggiungi asse SoftMotion CiA402 nel menu di scelta rapida visualizzato.
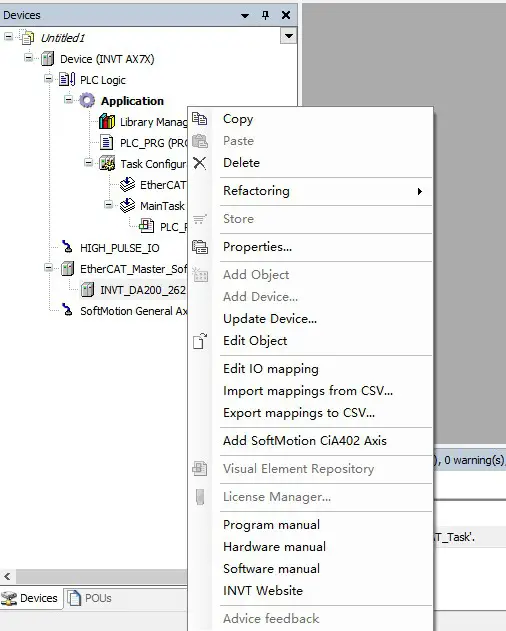
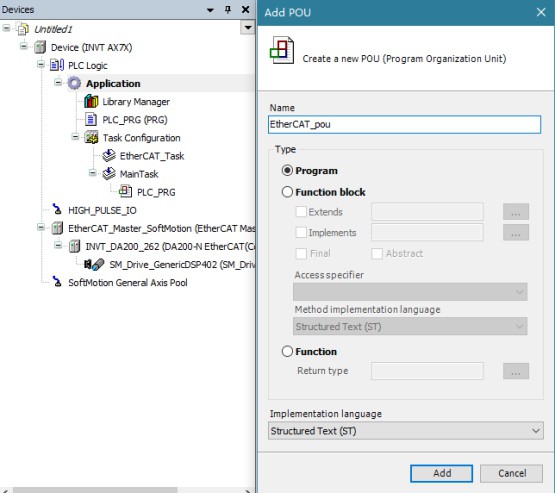
Passaggio 5 Fare clic con il pulsante destro del mouse su Application nella struttura di navigazione a sinistra e scegliere di aggiungere una POU EtherCAT. Fare doppio clic sull'EtherCAT_Task generato automaticamente da richiamare. Scegli il EtherCAT_pou creato. Scrivere il programma applicativo basato sul processo di controllo dell'applicazione.
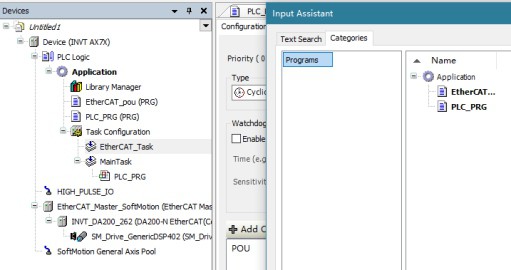
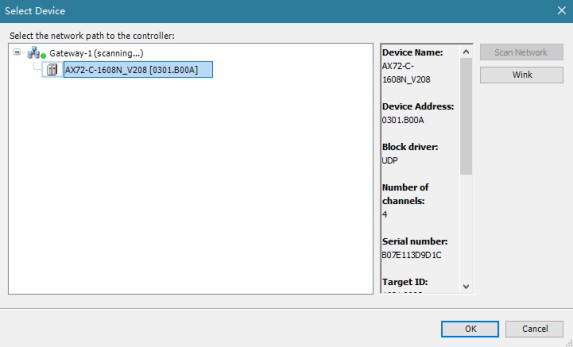
Passaggio 6 Fare doppio clic sulla struttura di navigazione del dispositivo, fare clic su Scan Network, scegliere AX72-C-1608N mostrato nella figura seguente e fare clic su Wink. Quindi fare clic su OK quando
l'indicatore di sistema della CPU lampeggia.
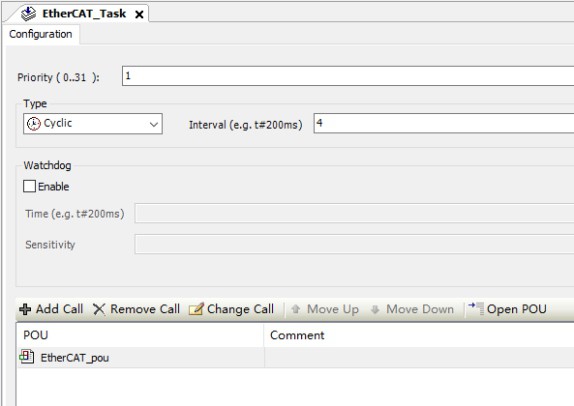
Passaggio 7 Fare doppio clic su EtherCAT_Task in Configurazione attività nel riquadro a sinistra. Imposta le priorità delle attività e gli intervalli di esecuzione in base ai requisiti in tempo reale delle attività.
In Invtmatic Studio, puoi fare clic ![]() per compilare programmi e puoi verificare la presenza di errori in base ai registri. Dopo aver confermato che la compilazione è completamente corretta, puoi fare clic
per compilare programmi e puoi verificare la presenza di errori in base ai registri. Dopo aver confermato che la compilazione è completamente corretta, puoi fare clic ![]() per accedere e scaricare i programmi utente nel controllore programmabile ed è possibile eseguire il debug della simulazione.
per accedere e scaricare i programmi utente nel controllore programmabile ed è possibile eseguire il debug della simulazione.
Controllo pre-avvio e manutenzione preventiva
Controllo pre-avvio
Se il cablaggio è stato completato, verificare quanto segue prima di far funzionare il modulo:
- I cavi di uscita del modulo soddisfano i requisiti.
- Le interfacce di espansione a qualsiasi livello sono collegate in modo affidabile.
- I programmi applicativi utilizzano i metodi operativi e le impostazioni dei parametri corretti.
Manutenzione preventiva
Eseguire la manutenzione preventiva come segue:
- Pulire regolarmente il controller programmabile, evitare che corpi estranei cadano nel controller e garantire buone condizioni di ventilazione e dissipazione del calore per il controller.
- Formulare le istruzioni per la manutenzione e testare regolarmente il controller.
- Controllare regolarmente il cablaggio e i terminali per assicurarsi che siano fissati saldamente.
Ulteriori informazioni
Non esitate a contattarci per ulteriori informazioni. Si prega di fornire il modello del prodotto e il numero di serie quando si effettua una richiesta.
Per ottenere informazioni su prodotti o servizi correlati, è possibile:
- Contattare l'ufficio locale INVT.
- Visita www.invt.com.
- Scansiona il seguente codice QR.

Centro assistenza clienti, Shenzhen INVT Electric Co., Ltd.
Indirizzo: INVT Guangming Technology Building, Songbai Road, Matian, distretto di Guangming, Shenzhen, Cina
Copyright © INVT. Tutti i diritti riservati. Le informazioni del manuale possono essere soggette a modifiche senza preavviso.

202207 (V1.0)
Documenti / Risorse
 |
invt Modulo CPU serie AX7 [pdf] Manuale di istruzioni Modulo CPU serie AX7, serie AX7, modulo CPU, modulo |



