![]()
AX7 ![]() Manual do usuário do módulo da CPU da série
Manual do usuário do módulo da CPU da série
Módulo de CPU da Série AX7
Obrigado por escolher o controlador programável da série AX (controlador programável para abreviar).
Baseado na plataforma Invtmatic Studio, o controlador programável oferece suporte total aos sistemas de programação IEC61131-3, fieldbus em tempo real EtherCAT, fieldbus CANopen e portas de alta velocidade, além de fornecer came eletrônico, engrenagem eletrônica e funções de interpolação.
O manual descreve principalmente as especificações, recursos, fiação e métodos de uso do módulo de CPU do controlador programável. Para garantir que você use o produto de forma segura e adequada e o coloque em pleno funcionamento, leia o manual cuidadosamente antes de instalá-lo. Para obter detalhes sobre os ambientes de desenvolvimento do programa do usuário e os métodos de design do programa do usuário, consulte o Manual do usuário do hardware do controlador programável da série AX e o Manual do usuário do software do controlador programável da série AX que emitimos.
O manual está sujeito a alterações sem aviso prévio. Por favor visite http://www.invt.com para baixar a versão mais recente do manual.
Precauções de segurança
Aviso
| Símbolo | Nome | Descrição | Abreviação |
| Perigo |
Perigo | Lesões pessoais graves ou até mesmo a morte podem ocorrer se os requisitos relacionados não forem seguidos. | |
| Aviso |
Aviso | Lesões pessoais ou danos ao equipamento podem ocorrer se os requisitos relacionados não forem seguidos. |
Entrega e instalação
| • Apenas profissionais treinados e qualificados estão autorizados a realizar instalação, fiação, manutenção e inspeção. • Não instale o controlador programável em inflamáveis. Além disso, evite que o controlador programável entre em contato ou adira a materiais inflamáveis. • Instale o controlador programável em um gabinete de controle bloqueável de pelo menos IP20, o que evita que pessoas sem conhecimento relacionado a equipamentos elétricos toquem por engano, pois o erro pode resultar em danos ao equipamento ou choque elétrico. Apenas o pessoal que recebeu conhecimento elétrico relacionado e treinamento de operação do equipamento pode operar o gabinete de controle. • Não execute o controlador programável se estiver danificado ou incompleto. • Não entre em contato com o controlador programável com damp objetos ou partes do corpo. Caso contrário, pode ocorrer choque elétrico. |
Seleção de cabos
| • Apenas profissionais treinados e qualificados estão autorizados a realizar instalação, fiação, manutenção e inspeção. • Compreenda totalmente os tipos de interface, especificações e requisitos relacionados antes da fiação. Caso contrário, a fiação incorreta causará funcionamento anormal. • Corte todas as fontes de alimentação conectadas ao controlador programável antes de realizar a fiação. • Antes de ligar para operação, certifique-se de que cada tampa do terminal do módulo esteja instalada corretamente no lugar após a conclusão da instalação e fiação. Isso evita que um terminal ativo seja tocado. Caso contrário, podem ocorrer lesões físicas, falha do equipamento ou mau funcionamento. • Instale componentes ou dispositivos de proteção adequados ao usar fontes de alimentação externas para o controlador programável. Isso evita que o controlador programável seja danificado devido a falhas na fonte de alimentação externa, sobrevoltage, sobrecorrente ou outras exceções. |
Comissionamento e execução
| • Antes de ligar para funcionar, certifique-se de que o ambiente de trabalho do controlador programável atende aos requisitos, a fiação está correta, as especificações de energia de entrada atendem aos requisitos e um circuito de proteção foi projetado para proteger o controlador programável para que o o controlador pode funcionar com segurança mesmo se ocorrer uma falha de dispositivo externo. • Para módulos ou terminais que requerem fonte de alimentação externa, configure dispositivos de segurança externos, como fusíveis ou disjuntores, para evitar danos causados por fonte de alimentação externa ou falhas do dispositivo. |
Manutenção e substituição de componentes
| • Apenas profissionais treinados e qualificados estão autorizados a realizar manutenção, inspeção e substituição de componentes para o controlador programável. • Corte todas as fontes de alimentação conectadas ao controlador programável antes da fiação do terminal. • Durante a manutenção e substituição de componentes, tome medidas para evitar que parafusos, cabos e outros materiais condutores caiam no interior do controlador programável. |
Disposição
| O controlador programável contém metais pesados. Descarte um controlador programável de sucata como lixo industrial. | |
| Descarte um produto de sucata separadamente em um ponto de coleta apropriado, mas não o coloque no fluxo normal de resíduos. |
Introdução do produto
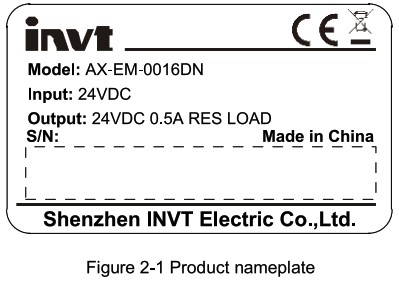
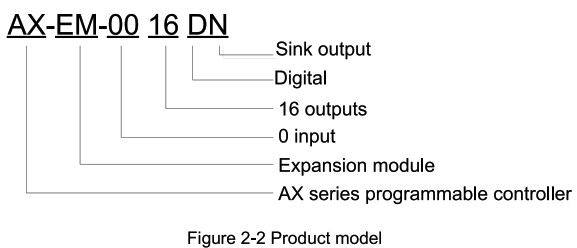
Modelo e placa de identificação
Função sobreview
Como módulo de controle principal do controlador programável, o módulo de CPU AX7J-C-1608L] (abreviação de módulo de CPU) tem as seguintes funções:
- Realiza o controle, monitoramento, processamento de dados e comunicação de rede para o sistema em execução.
- Suporta as linguagens de programação IL, ST, FBD, LD, CFC e SFC compatíveis com os padrões IEC61131-3 usando a plataforma Invtmatic Studio que a INVT lançou para programação.
- Suporta 16 módulos de expansão local (como módulos de E/S, temperatura e analógicos).
- Usa Ether CAT ou barramento aberto CAN para conectar módulos escravos, cada um dos quais suporta 16 módulos de expansão (como E/S, temperatura e módulos analógicos).
- Suporta o protocolo mestre/escravo Modbus TCP.
- Integra duas interfaces RS485, suportando o protocolo mestre/escravo Modbus RTU.
- Suporta E/S de alta velocidade, 16 entradas de alta velocidade e 8 saídas de alta velocidade.
- Suporta controle de movimento fieldbus EtherCAT com tempo de sincronização de 1ms, 2ms, 4ms ou 8ms.
- Suporta controle de movimento de eixo único ou multiaxial baseado em pulso, incluindo interpolação linear de 2-4 eixos e interpolação de arco de 2 eixos.
- Suporta relógio em tempo real.
- Suporta proteção de dados de falha de energia.
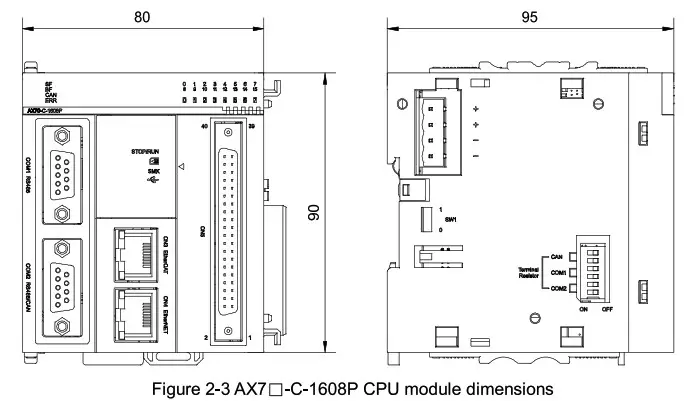
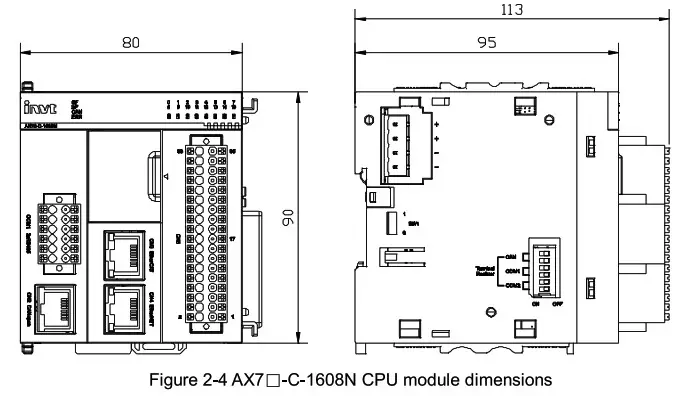
Dimensões estruturais
As dimensões estruturais (unidade: mm) são mostradas na figura a seguir.
Interface
Descrição da interface
Distribuição de interface
A Figura 3-1 e a Figura 3-2 mostram a distribuição da interface do módulo da CPU. Para cada interface, uma respectiva descrição de tela de seda é fornecida nas proximidades, o que facilita a fiação, a operação e a verificação.
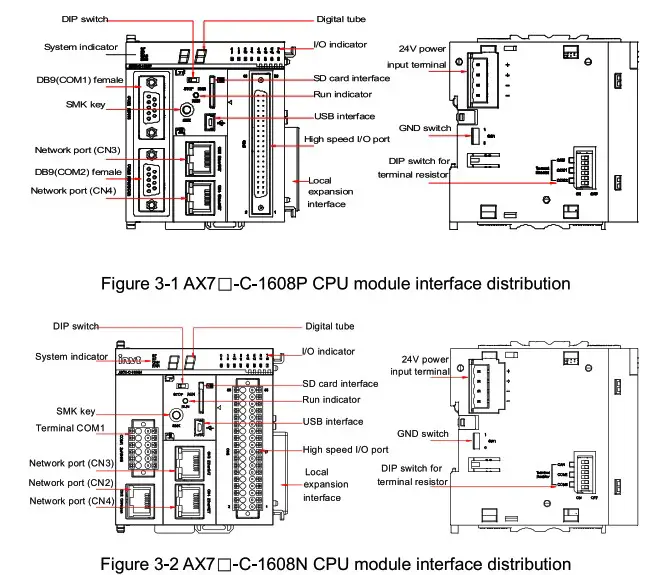
| Interface | Função | |
| Interruptor DIP | Interruptor DIP RUN/STOP. | |
| Indicador de sistema | SF: Indicador de falha do sistema. BF: Indicador de falha de barramento. CAN: Indicador de falha do barramento CAN. ERR: Indicador de falha do módulo. |
|
| chave SMK | Chave inteligente SMK. | |
| WO-C-1608P | COM1 (DB9) feminino |
Uma interface RS485, suportando Modbus RTU protocolo mestre/escravo. |
| COM2 (DB9) feminino |
Uma interface RS485 e a outra interface CAN A interface RS485 suporta o protocolo mestre/escravo Modbus RTU e a outra interface CAN suporta o protocolo mestre/escravo CANopen. |
|
| AX70-C-1608N | COM1&COM2 (Push-in n terminal) | Duas interfaces RS485, suportando Modbus RTU protocolo mestre/escravo. |
| CN2 (RJ45) | Interface CAN, suportando o protocolo mestre/escravo CAN aberto. | |
| CN3 (RJ45) | Interface de éter CAT | |
| CN4 (RJ45) | 1. Protocolo Modbus TCP 2.Funções Ethernet padrão 3. Download e depuração do programa do usuário (somente com IPv4) |
|
| Tubo digital | Exibe alarmes e responde ao pressionamento da tecla SMK. | |
| indicador de E/S | Indica se os sinais de 16 entradas e 8 saídas são válidos. | |
| Interface de cartão SD | Usado para armazenar programas e dados do usuário. | |
| Indicador de execução | Indica se o módulo da CPU está em execução. | |
| Interface USB | Usado para baixar e depurar programas. | |
| E/S de alta velocidade | 16 entradas de alta velocidade e 8 saídas de alta velocidade. | |
| Interface de expansão local | Suporta a expansão de 16 módulos de E/S, não permitindo hot swap. | |
| interface de alimentação 24V | CC 24V volumetage entrada | |
| Interruptor de aterramento | Interruptor de conexão entre o aterramento digital interno do sistema e o aterramento do invólucro. Ele é desconectado por padrão (SW1 é definido como 0). É usado apenas em cenários especiais onde o solo digital interno do sistema é tomado como plano de referência. Tenha cuidado antes de operá-lo. Caso contrário, a estabilidade do sistema é afetada. | |
| Chave DIP do resistor de terminal | ON indica a conexão do resistor terminal (é OFF por padrão). COM1 corresponde a RS485-1, COM2 corresponde a RS485-2 e CAN corresponde a CAN. | |
chave SMK
A chave SMK é usada principalmente para redefinir o endereço IP do módulo da CPU (rP) e limpar os programas aplicativos (cA). O endereço padrão do módulo da CPU é 192.168.1.10. Se você deseja restaurar o endereço padrão de um endereço IP modificado, pode restaurar o endereço padrão por meio da chave SMK. O método é o seguinte:
- Configure o módulo da CPU para o estado STOP. Pressione a tecla SMK. Quando o tubo digital exibir “rP”, pressione e segure a tecla SMK. Em seguida, o tubo digital exibe “rP” e desliga alternadamente, indicando que a redefinição do endereço IP está sendo executada. A operação de reinicialização é bem-sucedida quando o tubo digital está estável. Se você soltar a tecla SMK neste momento, o tubo digital exibirá “rP”. Pressione e segure a tecla SMK até que o tubo exiba “00” (rP—cA—rU-rP).
- Se você soltar a tecla SMK durante o processo em que o tubo digital exibe “rP” e desliga alternadamente, a operação de redefinição do endereço IP é cancelada e o tubo digital exibe “rP”.
Para limpar um programa do módulo da CPU, faça o seguinte:
Pressione a tecla SMK. Quando o tubo digital exibir “cA”, pressione e segure a tecla SMK. Em seguida, o tubo digital exibe “rP” e desliga alternadamente, indicando que o programa está sendo limpo. Quando o tubo digital estiver estável, reinicie o módulo da CPU. O programa foi limpo com sucesso.
Descrição do tubo digital
- Se os programas não apresentarem falhas após o download, o tubo digital do módulo da CPU exibirá “00” constantemente.
- Se um programa tiver uma falha, o tubo digital exibe as informações da falha de maneira intermitente.
- Por exemploample, se ocorrer apenas a falha 19, o tubo digital exibe “19” e desliga alternadamente. Se a falha 19 e a falha 29 ocorrerem simultaneamente, o tubo digital exibe “19”, desliga, exibe “29” e desliga alternadamente. Se ocorrerem mais falhas simultaneamente, o modo de exibição é semelhante.
Definição do terminal
AX7![]() -C-1608P Definição do terminal de comunicação COM1/COM2
-C-1608P Definição do terminal de comunicação COM1/COM2
Para o módulo de CPU AX7LJ-C-1608P, COM1 é o terminal de comunicação RS485 e COM2 é o terminal de comunicação RS485/CAN, ambos usam um conector DB9 para transmissão de dados. As interfaces e pinos são descritos a seguir.
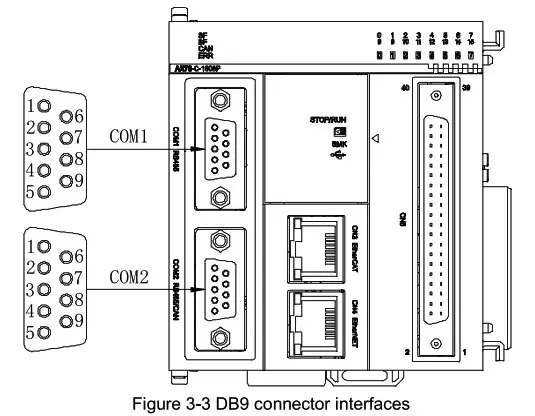
Tabela 3-1 Pinos do conector COM1/COM2 DB39
| Interface | Distribuição | Alfinete | Definição | Função |
| COM1 (RS485) |
1 | / | / | |
| 2 | / | / | ||
| 3 | / | / | ||
| 4 | RS485A | sinal diferencial RS485 + | ||
| 5 | RS485B | Sinal diferencial RS485 – | ||
| 6 | / | / | ||
| 7 | / | / | ||
| 8 | / | / | ||
| 9 | GND_RS485 | Terra de alimentação RS485 | ||
| COM2 (RS485/CAN) |
1 | / | / | |
| 2 | EU POSSO | CAN sinal diferencial - | ||
| 3 | / | / | ||
| 4 | RS485A | sinal diferencial RS485 + | ||
| 5 | RS485B | Sinal diferencial RS485 – | ||
| 6 | GND_CAN | aterramento de energia CAN | ||
| 7 | PODE _H | Sinal diferencial CAN + | ||
| 8 | / | / | ||
| 9 | GND_RS485 | Terra de alimentação RS485 |
AX7![]() -C-1608P definição de terminal de E/S de alta velocidade
-C-1608P definição de terminal de E/S de alta velocidade
AX7![]() O módulo de CPU -C-1608P possui 16 entradas de alta velocidade e 8 saídas de alta velocidade. As interfaces e pinos são descritos a seguir.
O módulo de CPU -C-1608P possui 16 entradas de alta velocidade e 8 saídas de alta velocidade. As interfaces e pinos são descritos a seguir.
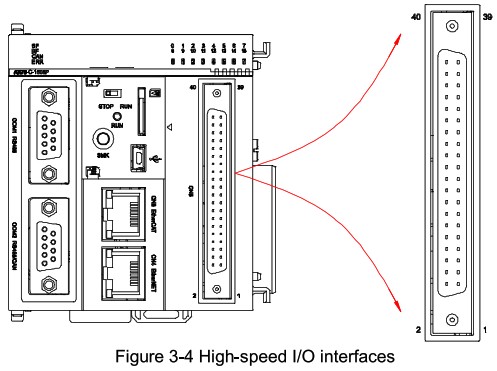
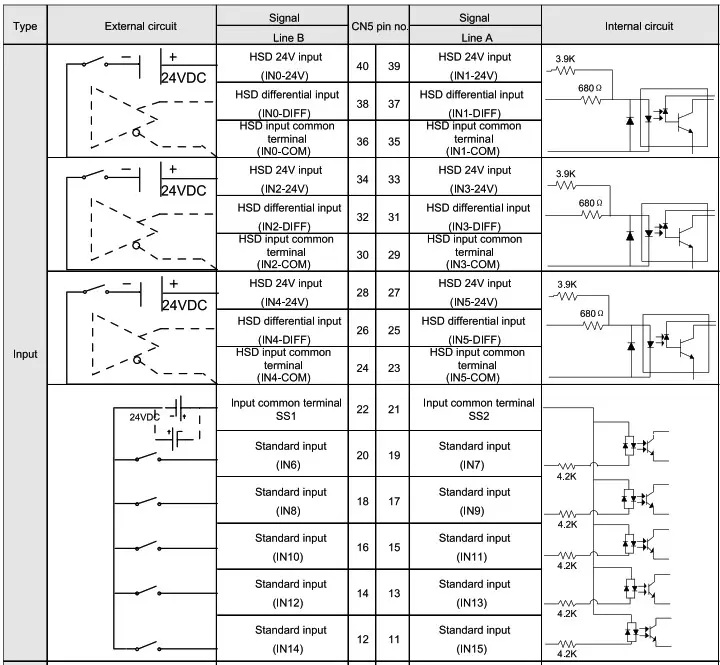
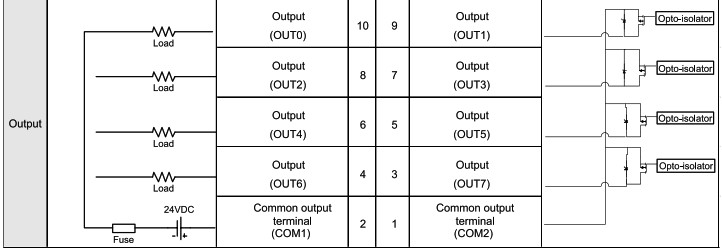
Tabela 3-2 Pinos de E/S de alta velocidade
AX7![]() -C-1608N Definição do terminal de comunicação COM1/CN2
-C-1608N Definição do terminal de comunicação COM1/CN2
Para AX7![]() Módulo de CPU -C-1608N, COM1 é o terminal de comunicação RS485 de dois canais, usando um conector push-in de 12 pinos para transmissão de dados. CN2 é o terminal de comunicação CAN, utilizando o conector RJ45 para transmissão de dados. As interfaces e pinos são descritos a seguir.
Módulo de CPU -C-1608N, COM1 é o terminal de comunicação RS485 de dois canais, usando um conector push-in de 12 pinos para transmissão de dados. CN2 é o terminal de comunicação CAN, utilizando o conector RJ45 para transmissão de dados. As interfaces e pinos são descritos a seguir.

Tabela 3-3 pinos do conector COM1/ CN2
| Funções do terminal push-in de COM1 | ||||
| Definição | Função | Alfinete | ||
| COM1 RS485 | A | Sinal diferencial RS485 + |
12 | |
| B | Sinal diferencial RS485 – | 10 | ||
| Terra | Potência do chip RS485 _1 chão |
8 | ||
| PE | Terra do escudo | 6 | ||
| COM2 RS485 | A | Sinal diferencial RS485 + |
11 | |
| B | Sinal diferencial RS485 – | 9 | ||
| Terra | Potência do chip RS485_2 chão |
7 | ||
| PE | Terra do escudo | 5 | ||
| Nota: Os pinos 1-4 não são usados. | ||||
| Funções dos pinos do CN2 | ||||
| Definição | Função | Alfinete | ||
| Pode abrir | Terra | aterramento de energia CAN | 1 | |
| EU POSSO | CAN sinal diferencial - | 7 | ||
| CAN_H | Sinal diferencial CAN + | 8 | ||
| Nota: Os pinos 2-6 não são usados. | ||||
AX7![]() -C-1608N definição de terminal de E/S de alta velocidade
-C-1608N definição de terminal de E/S de alta velocidade
AX7![]() O módulo de CPU 1-C-1608N possui 16 entradas de alta velocidade e 8 saídas de alta velocidade. A figura a seguir mostra a distribuição do terminal e a tabela a seguir lista os pinos.
O módulo de CPU 1-C-1608N possui 16 entradas de alta velocidade e 8 saídas de alta velocidade. A figura a seguir mostra a distribuição do terminal e a tabela a seguir lista os pinos.
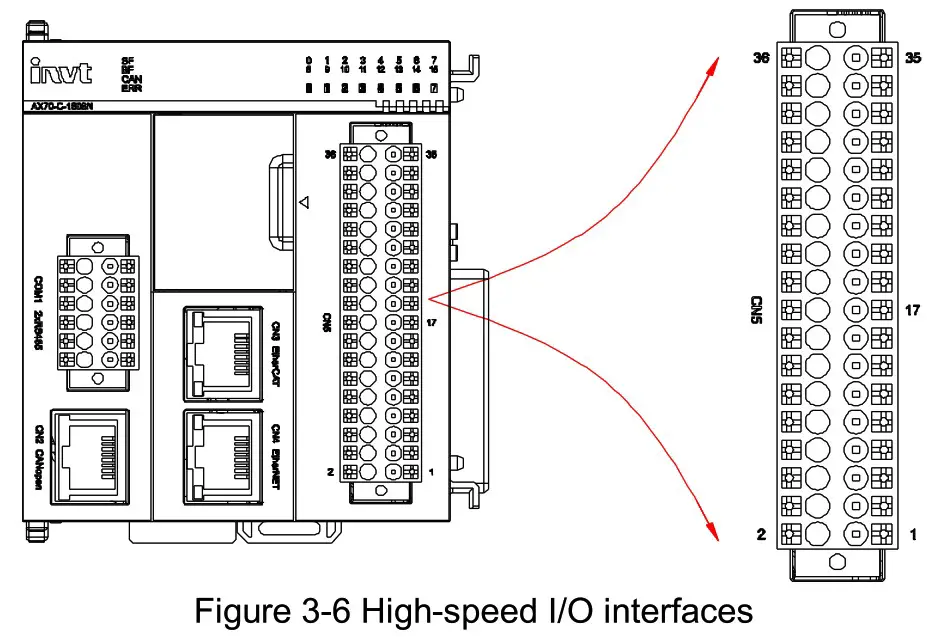
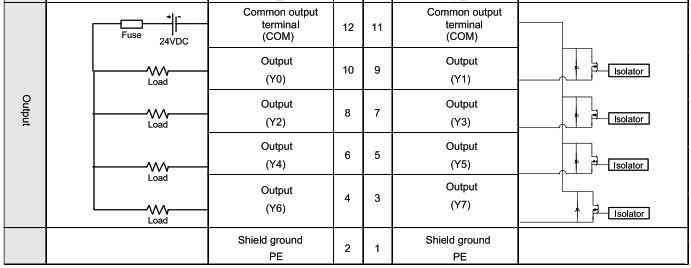
Tabela 3-4 Pinos de E/S de alta velocidade
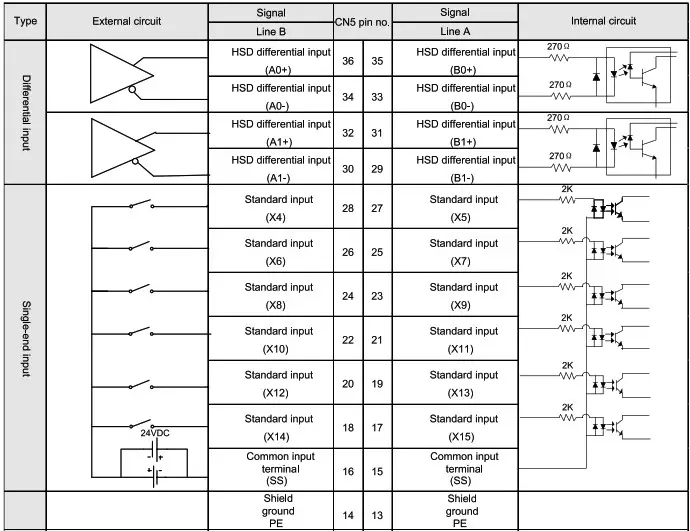
Observação:
- Todos os 16 canais de entrada do AX7
 O módulo de CPU -C-1608P permite entrada de alta velocidade, mas os primeiros 6 canais suportam entrada de extremidade única ou diferencial de 24 V, e os últimos 10 canais suportam entrada de extremidade única de 24 V.
O módulo de CPU -C-1608P permite entrada de alta velocidade, mas os primeiros 6 canais suportam entrada de extremidade única ou diferencial de 24 V, e os últimos 10 canais suportam entrada de extremidade única de 24 V. - Todos os 16 canais de entrada do AX7O módulo de CPU -C-1608N permite entrada de alta velocidade, mas os primeiros 4 canais suportam entrada diferencial e os últimos 12 canais suportam entrada de extremidade única de 24V.
- Cada ponto de E/S é isolado do circuito interno.
- O comprimento total do cabo de conexão da porta de E/S de alta velocidade não pode exceder 3 metros.
- Não dobre os cabos ao prendê-los.
- Durante o roteamento de cabos, separe os cabos de conexão dos cabos de alta potência que causam forte interferência, mas não prenda os cabos de conexão com estes últimos. Além disso, evite roteamento paralelo de longa distância.
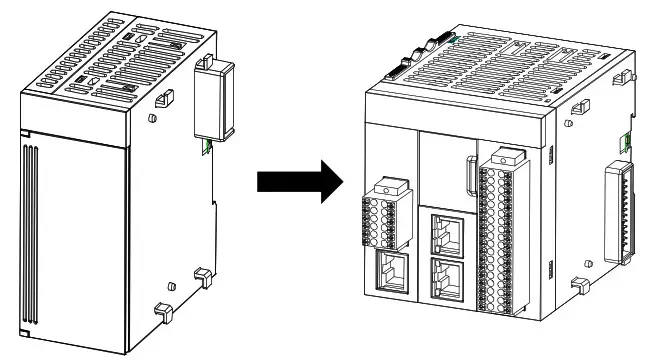
Instalação do módulo
Usando design modular, o controlador programável é fácil de instalar e manter. Quanto ao módulo da CPU, os principais objetos de conexão são os módulos de alimentação e expansão.
Os módulos são conectados usando as interfaces de conexão e encaixes fornecidos pelo módulo.
O procedimento de montagem é o seguinte:
| Etapa 1 Deslize o encaixe no módulo da CPU na direção mostrada na figura a seguir (usando o módulo de alimentação conexão para exampe). |
Etapa 2 Alinhe o módulo da CPU com o conector do módulo de alimentação para intertravamento. |
 |
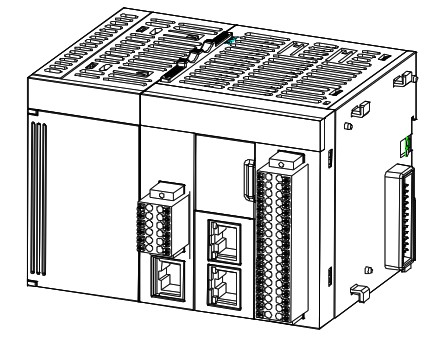 |
| Etapa 3 Deslize o encaixe no módulo da CPU na direção mostrada na figura a seguir para conectar e travar os dois módulos. | Etapa 4 Quanto à instalação em trilho DIN padrão, prenda o respectivo módulo no trilho de instalação padrão até que o encaixe encaixe no lugar. |
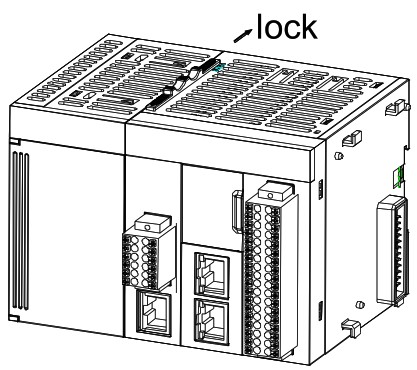 |
 |
Conexão de cabo e especificações
Conexão de barramento Ether CAT
Especificações do barramento Ether CAT
| Item | Descrição |
| Protocolo de comunicação | Éter CAT |
| Serviço suportado | COE (DOP/SDO) |
| mín. intervalo de sincronização | 1ms/4 eixos (valor típico) |
| Método de sincronização | DC para sincronização/DC não utilizado |
| Camada física | 100BASE-TX |
| Modo duplex | Duplex completo |
| Estrutura da topologia | Conexão serial |
| Transmissão média | Cabo de rede (consulte a seção “Seleção de cabo”) |
| Distância de transmissão | Menos de 100m entre dois nós |
| Número de nós escravos | Até 125 |
| Comprimento do quadro Ether CAT | 44 bytes-1498 bytes |
| Dados do processo | Até 1486 bytes contidos em um único quadro |
Seleção de cabos
O módulo de CPU pode implementar comunicação de barramento Ether CAT através da porta CN3. Cabos padrão INVT são recomendados. Se você mesmo fizer os cabos de comunicação, verifique se os cabos atendem aos seguintes requisitos:
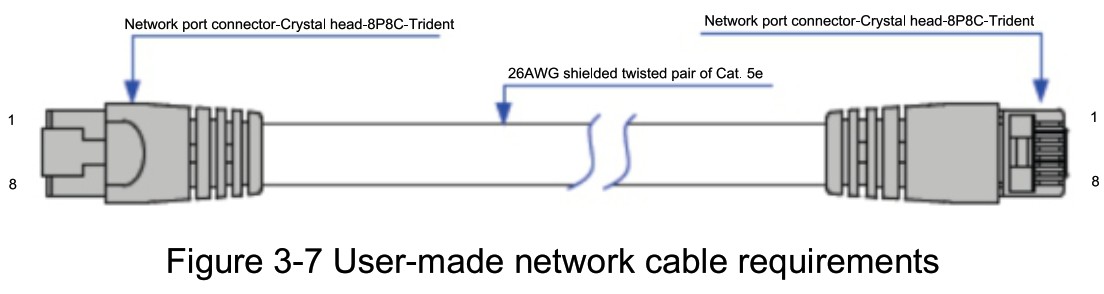
Observação:
- Os cabos de comunicação que você usa devem passar 100% no teste de condutividade, sem curto-circuito, circuito aberto, deslocamento ou mau contato.
- Para garantir a qualidade da comunicação, o comprimento do cabo de comunicação EtherCAT não pode ultrapassar 100 metros.
- Recomenda-se fazer os cabos de comunicação usando cabos blindados de par trançado da categoria 5e, em conformidade com EIA/TIA568A, EN50173, ISO/IEC11801, boletim EIA/TIA TSB e EIA/TIA SB40-A&TSB36.
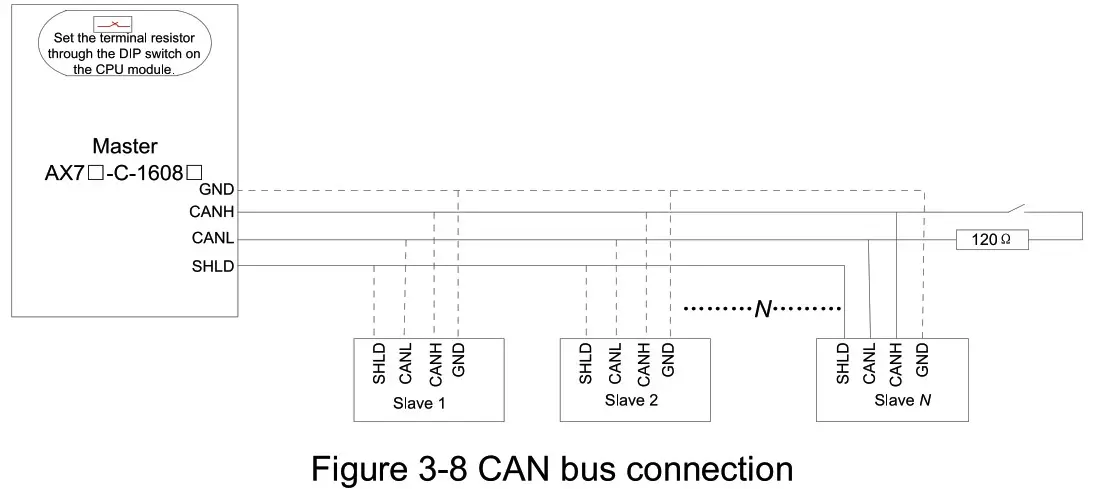
Conexão de cabo CAN aberto
Rede
A estrutura da topologia da conexão do barramento CAN é mostrada na figura a seguir. Recomenda-se que o par trançado blindado seja usado para conexão do barramento CAN. Cada extremidade do barramento CAN se conecta a um resistor de 1200 terminais para evitar a reflexão do sinal. Na maioria dos casos, a camada de blindagem usa aterramento de ponto único.
Seleção de cabos
- Para AX7-C-1608P Módulo CPU, o mesmo terminal é utilizado tanto para comunicação CANopen quanto para comunicação RS485, utilizando um conector DB9 para transmissão de dados. Os pinos no conector DB9 foram descritos anteriormente.
- Para AX71-C-1608N Módulo CPU, o terminal RJ45 é utilizado para comunicação CANopen para transmissão de dados. Os pinos do conector RJ45 foram descritos anteriormente.
Cabos padrão INVT são recomendados. Se você mesmo fizer os cabos de comunicação, faça os cabos de acordo com a descrição do pino e certifique-se de que o processo de fabricação e os parâmetros técnicos atendam aos requisitos de comunicação.
Observação:
- Para aumentar a capacidade anti-interferência do cabo, recomenda-se o uso de blindagem de folha de alumínio e técnicas de blindagem trançada de alumínio-magnésio ao fazer os cabos.
- Use a técnica de enrolamento de par trançado para cabos diferenciais.
Conexão de comunicação serial RS485
O módulo de CPU suporta 2 canais de comunicação RS485.
- Para AX7-C-1608P Módulo de CPU, as portas COM1 e COM2 utilizam o conector DB9 para transmissão de dados. Os pinos no conector DB9 foram descritos anteriormente.
- Para AX7Módulo de CPU -C-1608N, a porta usa o conector de terminal push-in de 12 pinos para transmissão de dados. Os pinos no conector do terminal foram descritos anteriormente.
Cabos padrão INVT são recomendados. Se você mesmo fizer os cabos de comunicação, faça os cabos de acordo com a descrição do pino e certifique-se de que o processo de fabricação e os parâmetros técnicos atendam aos requisitos de comunicação.
Observação:
- Para aumentar a capacidade anti-interferência do cabo, recomenda-se o uso de blindagem de folha de alumínio e técnicas de blindagem trançada de alumínio-magnésio ao fazer os cabos.
- Use a técnica de enrolamento de par trançado para cabos diferenciais.
Conexão Ethernet
Rede
A porta Ethernet do módulo da CPU é CN4, que pode se conectar a outro dispositivo como um computador ou dispositivo HMI usando um cabo de rede no modo ponto a ponto.
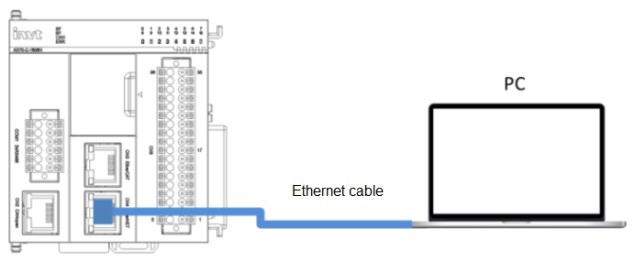
Figura 3-9 Conexão Ethernet
Você também pode conectar a porta Ethernet a um hub ou switch usando um cabo de rede, implementando conexão multiponto.

Figura 3-10 Rede Ethernet
Seleção de cabos
Para melhorar a confiabilidade da comunicação, use cabos blindados de par trançado de categoria 5 ou superior como cabos Ethernet. Cabos padrão INVT são recomendados.
Instruções de uso
Parâmetros técnicos
Especificações gerais do módulo de CPU
| Item | Descrição | |||||
| Vol de entradatage | 24 VCC | |||||
| Consumo de energia | < 15W | |||||
| Falha de energia tempo de proteção |
300ms (sem proteção dentro de 20 segundos após ligar) | |||||
| Bateria de reserva do relógio de tempo real |
Suportado | |||||
| Energia do barramento do backplane fornecer |
5V/2.5A | |||||
| Método de programação | Linguagens de programação IEC 61131-3 (LD, FBD, IL, ST, SFC, e CFC) |
|||||
| Execução do programa método |
Local on-line | |||||
| Armazenamento do programa do usuário espaço |
10MB | |||||
| Espaço de memória flash para falha de energia proteção |
512 KB | |||||
| Cartão SD especificações |
MicroSD 32G | |||||
| Elementos suaves e características |
||||||
| Elemento | Nome | Contar | Características de armazenamento | |||
| Padrão | gravável | Descrição | ||||
| I | relé de entrada | 64KWord | Não Salvo | Não | X: 1 bit B. 8 bits W: 16 bits D: 32 bits L: 64 bits | |
| Q | Relé de saída | 64KWord | Não Salvo | Não | ||
| M | Saída auxiliar | 256KWord | Salvar | Sim | ||
| Retenção do programa método sobre o poder falha |
Retenção pelo flash interno | |||||
| Modo de interrupção | O sinal DI de alta velocidade do módulo da CPU pode ser configurado como entrada de interrupção, permitindo até oito pontos de entrada, e os modos de interrupção de borda ascendente e de borda descendente podem ser configurados. | |||||
Especificações de E/S de alta velocidade
Especificações de entrada de alta velocidade
| Item | Especifcações | |
| Nome do sinal | Entrada diferencial de alta velocidade | Entrada single-end de alta velocidade |
| Entrada nominal volumetage |
2.5V | 24VDC (-15% — +20%, pulsante dentro de 5%) |
| Entrada nominal atual |
6.8mA | 5.7mA (valor típico) (a 24 Vcc) |
| corrente ON | / | Menos de 2mA |
| OFF atual | / | Menos de 1mA |
| Resistência de entrada | 5400 | 2.2k0 |
| máx. contando velocidade |
800K Pulsos/s (frequência quadruplicada 2PH), 200kHz (canal único de entrada) | |
| Serviço de entrada 2PH razão |
40%. 60% | |
| Terminal comum | / | Um terminal comum é usado. |
Especificações de saída de alta velocidade
| Item | Especificações |
| Nome do sinal | Saída (YO—Y7) |
| Polaridade de saída | AX7 AX7 |
| Circuito de controle voltage | Corrente contínua 5 V-24 V |
| Corrente de carga nominal | 100mA/ponto, 1A/COM |
| Máx. voltage soltar em ON | 0.2V (valor típico) |
| Corrente de fuga em OFF | Menos de 0.1mA |
| Frequência de saída | 200kHz (A saída de 200kHz requer que a carga equivalente conectada externamente seja maior que 12mA.) |
| Terminal comum | Cada oito pontos usam um terminal comum. |
Observação:
- As portas de E/S de alta velocidade têm restrições na frequência permitida. Se a frequência de entrada ou saída exceder o valor permitido, o controle e a identificação podem estar anormais. Organize as portas de E/S corretamente.
- A interface de entrada diferencial de alta velocidade não aceita o nível de entrada de pressão diferencial superior a 7V. Caso contrário, o circuito de entrada pode ser danificado.
Introdução e download do software de programação
Introdução ao software de programação
O INVTMATIC Studio é um software de programação de controlador programável desenvolvido pela INVT. Ele fornece um ambiente de desenvolvimento de programação aberto e totalmente integrado com tecnologia avançada e funções poderosas para desenvolvimento de projetos com base em linguagens de programação compatíveis com IEC 61131-3. É amplamente utilizado em energia, transporte, municipal, metalurgia, química, farmacêutica, alimentícia, têxtil, embalagem, impressão, borracha e plásticos, máquinas-ferramentas e indústrias similares.
Ambiente de execução e download
Você pode instalar o Invtmatic Studio em um computador desktop ou portátil, no qual o sistema operacional seja pelo menos Windows 7, o espaço de memória seja de pelo menos 2 GB, o espaço livre de hardware seja de pelo menos 10 GB e a frequência principal da CPU seja superior a 2 GHz. Então você pode conectar seu computador ao módulo da CPU do controlador programável através de um cabo de rede e editar os programas do usuário através do software Invtmatic Studio para que você possa baixar e depurar os programas do usuário.
instância de programação
A seguir, descrevemos como executar a programação usando um examparquivo (AX72-C-1608N).
Antes de tudo, conecte todos os módulos de hardware do controlador programável, incluindo a conexão da fonte de alimentação ao módulo da CPU, a conexão do módulo da CPU ao computador onde o Invtmatic Studio foi instalado e ao módulo de expansão necessário e a conexão do barramento EtherCAT ao o acionamento motorizado. Inicie o Invtmatic Studio para criar um projeto e realizar a configuração da programação.
O procedimento é o seguinte:
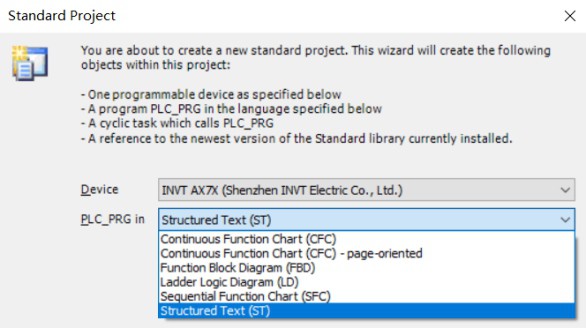
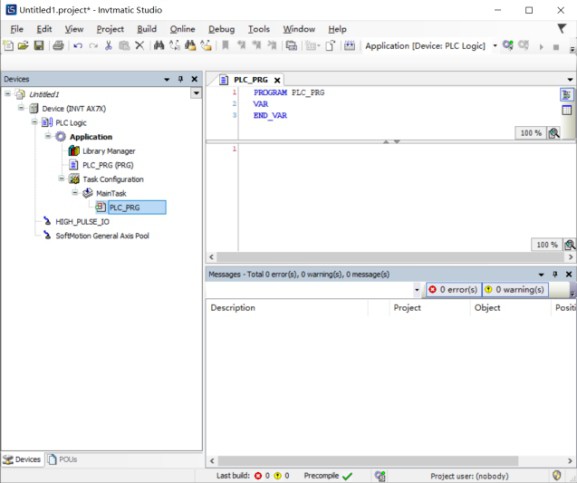
Etapa 1 Escolha File > Novo projeto, selecione o tipo de projeto padrão e defina o local e o nome para salvar o projeto. Clique OK. Em seguida, selecione o dispositivo INVT AX7X e a linguagem de programação Texto Estruturado (ST) na janela padrão de configuração do projeto que aparece. A interface de configuração e programação CODESYS aparece.
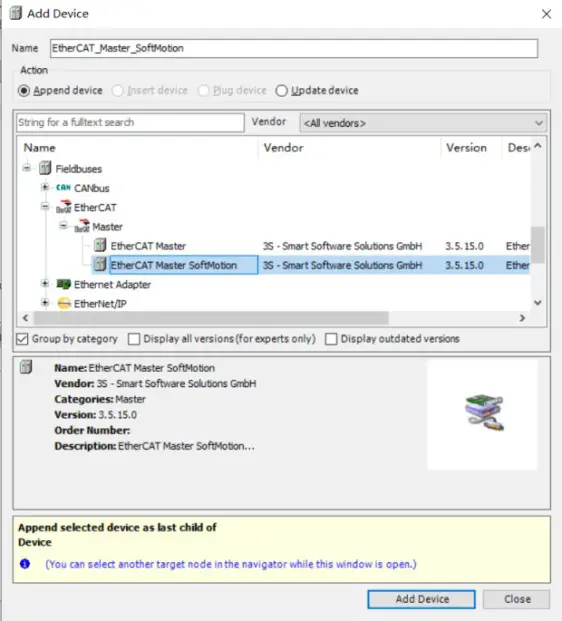
Etapa 2 Clique com o botão direito do mouse na árvore de navegação Dispositivo. Em seguida, escolha Adicionar dispositivo. Escolha Ether CAT Master Soft Motion.
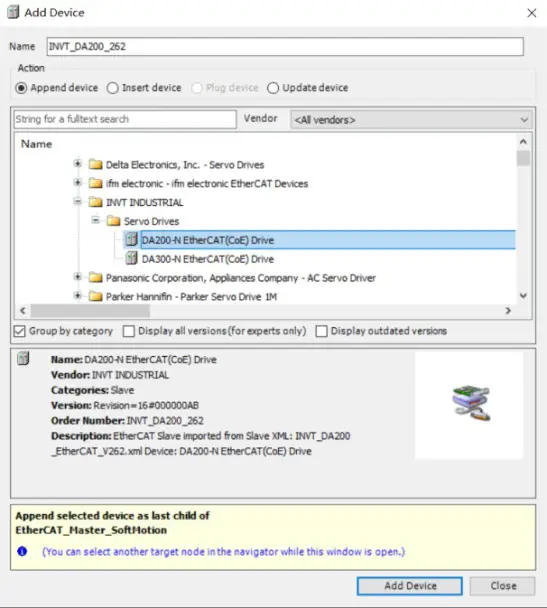
Passo 3 Clique com o botão direito EtherCAT_Master_SoftMotion na árvore de navegação à esquerda. Escolha Adicionar dispositivo. Escolha DA200-N Ether CAT(CoE) Drive na janela que aparece.
Passo 4 Escolha Add SoftMotion CiA402 Axis no menu de atalho que aparece.
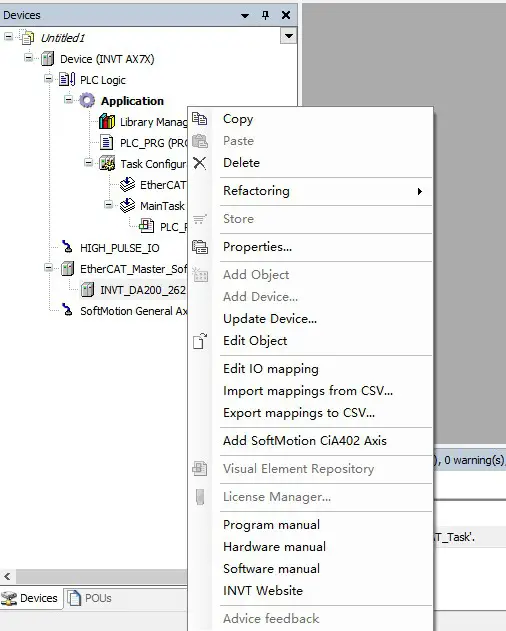
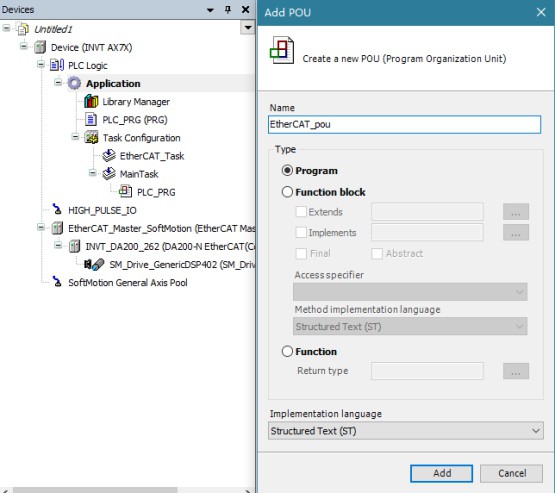
Etapa 5 Clique com o botão direito do mouse em Aplicativo na árvore de navegação à esquerda e escolha adicionar uma POU EtherCAT. Clique duas vezes no EtherCAT_Task gerado automaticamente para invocar. Escolha o EtherCAT_pou criado. Escreva o programa aplicativo com base no processo de controle do aplicativo.
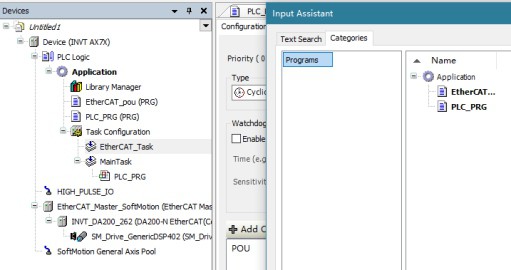
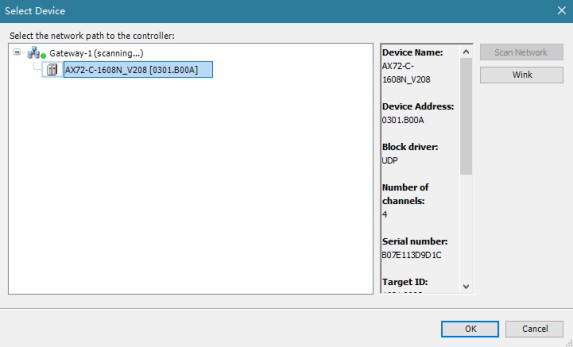
Etapa 6 Clique duas vezes na árvore de navegação Dispositivo, clique em Digitalizar rede, escolha AX72-C-1608N mostrado na figura a seguir e clique em Wink. Em seguida, clique em OK quando
o indicador do sistema da CPU pisca.
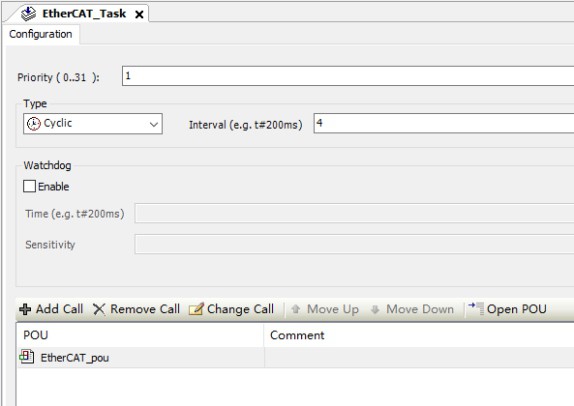
Etapa 7 Clique duas vezes em EtherCAT_Task em Task Configuration no painel esquerdo. Defina prioridades de tarefas e intervalos de execução com base nos requisitos de tempo real da tarefa.
No Invtmatic Studio, você pode clicar ![]() para compilar programas, e você pode verificar erros de acordo com os logs. Depois de confirmar que a compilação está totalmente correta, você pode clicar em
para compilar programas, e você pode verificar erros de acordo com os logs. Depois de confirmar que a compilação está totalmente correta, você pode clicar em ![]() para fazer login e baixar programas do usuário para o controlador programável e você pode executar a depuração de simulação.
para fazer login e baixar programas do usuário para o controlador programável e você pode executar a depuração de simulação.
Verificação pré-inicialização e manutenção preventiva
Verificação pré-inicialização
Se você completou a fiação, certifique-se do seguinte antes de colocar o módulo em funcionamento:
- Os cabos de saída do módulo atendem aos requisitos.
- As interfaces de expansão em qualquer nível são conectadas de forma confiável.
- Os programas aplicativos usam os métodos de operação e configurações de parâmetros corretos.
Manutenção preventiva
Faça a manutenção preventiva da seguinte forma:
- Limpe o controlador programável regularmente, evite que objetos estranhos caiam no controlador e garanta boas condições de ventilação e dissipação de calor para o controlador.
- Formule instruções de manutenção e teste regularmente o controlador.
- Verifique regularmente a fiação e os terminais para garantir que estejam bem presos.
Mais informações
Por favor sinta-se a vontade para nos contactar para maiores informações. Forneça o modelo do produto e o número de série ao fazer uma consulta.
Para obter informações relacionadas a produtos ou serviços, você pode:
- Entre em contato com o escritório local da INVT.
- Visita www.invt.com.
- Digitalize o seguinte código QR.

Centro de Atendimento ao Cliente, Shenzhen INVT Electric Co., Ltd.
Endereço: INVT Guangming Technology Building, Songbai Road, Matian, Guangming District, Shenzhen, China
Copyright © INVT. Todos os direitos reservados. As informações do manual podem estar sujeitas a alterações sem aviso prévio.

202207 (V1.0)
Documentos / Recursos
 |
invt Módulo de CPU da Série AX7 [pdf] Manual de Instruções Módulo de CPU da Série AX7, Série AX7, Módulo de CPU, Módulo |



