![]()
AX7 ![]() คู่มือผู้ใช้โมดูลซีพียูซีรีส์
คู่มือผู้ใช้โมดูลซีพียูซีรีส์
โมดูลซีพียูซีรีส์ AX7
ขอขอบคุณที่เลือกใช้คอนโทรลเลอร์ที่ตั้งโปรแกรมได้ซีรีส์ AX (เรียกสั้นๆ ว่าคอนโทรลเลอร์ที่ตั้งโปรแกรมได้)
ตัวควบคุมโปรแกรมได้ที่ใช้แพลตฟอร์ม Invtmatic Studio รองรับระบบการเขียนโปรแกรม IEC61131-3, ฟิลด์บัสแบบเรียลไทม์ EtherCAT, ฟิลด์บัส CANopen และพอร์ตความเร็วสูง และยังมีฟังก์ชันแคมอิเล็กทรอนิกส์ เกียร์อิเล็กทรอนิกส์ และอินเทอร์โพเลชั่นอีกด้วย
คู่มือนี้อธิบายคุณลักษณะ ฟีเจอร์ การเดินสาย และวิธีใช้โมดูล CPU ของตัวควบคุมโปรแกรมเป็นหลัก เพื่อให้แน่ใจว่าคุณใช้ผลิตภัณฑ์ได้อย่างปลอดภัยและถูกต้อง และใช้งานได้เต็มที่ โปรดอ่านคู่มืออย่างละเอียดก่อนทำการติดตั้ง สำหรับรายละเอียดเกี่ยวกับสภาพแวดล้อมการพัฒนาโปรแกรมของผู้ใช้และวิธีการออกแบบโปรแกรมของผู้ใช้ โปรดดูคู่มือผู้ใช้ฮาร์ดแวร์ตัวควบคุมโปรแกรมซีรีส์ AX และคู่มือผู้ใช้ซอฟต์แวร์ตัวควบคุมโปรแกรมซีรีส์ AX ที่เราออกให้
คู่มืออาจเปลี่ยนแปลงได้โดยไม่ต้องแจ้งให้ทราบล่วงหน้า กรุณาเยี่ยมชม http://www.invt.com เพื่อดาวน์โหลดเวอร์ชันคู่มือล่าสุด
ข้อควรระวังเพื่อความปลอดภัย
คำเตือน
| เครื่องหมาย | ชื่อ | คำอธิบาย | คำย่อ |
| อันตราย |
อันตราย | การบาดเจ็บสาหัสหรือถึงขั้นเสียชีวิตอาจเกิดขึ้นได้หากไม่ปฏิบัติตามข้อกำหนดที่เกี่ยวข้อง | |
| คำเตือน |
คำเตือน | การบาดเจ็บส่วนบุคคลหรืออุปกรณ์เสียหายอาจเกิดขึ้นได้หากไม่ปฏิบัติตามข้อกำหนดที่เกี่ยวข้อง |
การจัดส่งและการติดตั้ง
| • เฉพาะผู้เชี่ยวชาญที่ผ่านการฝึกอบรมและผ่านการรับรองเท่านั้นที่ได้รับอนุญาตให้ดำเนินการติดตั้ง เดินสายไฟ บำรุงรักษา และตรวจสอบ • อย่าติดตั้งโปรแกรมควบคุมบนวัตถุไวไฟ นอกจากนี้ ป้องกันไม่ให้ตัวควบคุมที่ตั้งโปรแกรมได้สัมผัสกับสารไวไฟ • ติดตั้งโปรแกรมควบคุมในตู้ควบคุมที่ล็อคได้อย่างน้อย IP20 ซึ่งจะป้องกันไม่ให้บุคลากรที่ไม่มีความรู้เรื่องอุปกรณ์ไฟฟ้าสัมผัสโดยไม่ได้ตั้งใจ เนื่องจากความผิดพลาดอาจทำให้อุปกรณ์เสียหายหรือไฟฟ้าช็อตได้ เฉพาะบุคลากรที่ได้รับความรู้ด้านไฟฟ้าที่เกี่ยวข้องและการฝึกอบรมการใช้งานอุปกรณ์เท่านั้นที่สามารถใช้งานตู้ควบคุมได้ • อย่าเรียกใช้ตัวควบคุมแบบตั้งโปรแกรมได้หากเกิดความเสียหายหรือไม่สมบูรณ์ • อย่าติดต่อกับตัวควบคุมที่ตั้งโปรแกรมได้กับงamp วัตถุหรือส่วนต่างๆ ของร่างกาย มิฉะนั้นอาจเกิดไฟฟ้าช็อตได้ |
การเลือกใช้สายเคเบิล
| • เฉพาะผู้เชี่ยวชาญที่ผ่านการฝึกอบรมและผ่านการรับรองเท่านั้นที่ได้รับอนุญาตให้ดำเนินการติดตั้ง เดินสายไฟ บำรุงรักษา และตรวจสอบ • ทำความเข้าใจประเภทอินเทอร์เฟซ ข้อมูลจำเพาะ และข้อกำหนดที่เกี่ยวข้องอย่างถ่องแท้ก่อนการเดินสาย มิฉะนั้นจะทำให้การเดินสายไฟไม่ถูกต้อง วิ่งผิดปกติ. • ตัดแหล่งจ่ายไฟทั้งหมดที่เชื่อมต่อกับตัวควบคุมแบบตั้งโปรแกรมได้ก่อนดำเนินการเดินสาย • ก่อนเปิดเครื่องเพื่อใช้งาน โปรดตรวจสอบให้แน่ใจว่าได้ติดตั้งฝาครอบขั้วต่อโมดูลแต่ละอันอย่างถูกต้องหลังจากติดตั้งและเดินสายเรียบร้อยแล้ว เพื่อป้องกันไม่ให้ขั้วต่อที่มีไฟถูกสัมผัส มิฉะนั้น อาจส่งผลให้เกิดการบาดเจ็บทางร่างกาย อุปกรณ์เกิดความผิดพลาด หรือทำงานผิดปกติได้ • ติดตั้งส่วนประกอบหรืออุปกรณ์ป้องกันที่เหมาะสมเมื่อใช้แหล่งจ่ายไฟภายนอกสำหรับตัวควบคุมแบบตั้งโปรแกรมได้ ซึ่งจะช่วยป้องกันไม่ให้ตัวควบคุมแบบตั้งโปรแกรมได้รับความเสียหายอันเนื่องมาจากความผิดพลาดของแหล่งจ่ายไฟภายนอก แรงดันไฟฟ้าเกินtage, กระแสไฟเกิน หรือข้อยกเว้นอื่นๆ |
การว่าจ้างและการทำงาน
| • ก่อนเปิดเครื่องสำหรับการทำงาน ตรวจสอบให้แน่ใจว่าสภาพแวดล้อมการทำงานของคอนโทรลเลอร์ที่ตั้งโปรแกรมได้ตรงตามข้อกำหนด การเดินสายไฟถูกต้อง ข้อมูลจำเพาะด้านพลังงานอินพุตตรงตามข้อกำหนด และวงจรป้องกันได้รับการออกแบบมาเพื่อป้องกันคอนโทรลเลอร์ที่ตั้งโปรแกรมได้ เพื่อให้โปรแกรมที่ตั้งโปรแกรมได้ คอนโทรลเลอร์สามารถทำงานได้อย่างปลอดภัยแม้ว่าจะเกิดข้อผิดพลาดจากอุปกรณ์ภายนอกก็ตาม • สำหรับโมดูลหรือเทอร์มินัลที่ต้องการแหล่งจ่ายไฟภายนอก ให้กำหนดค่าอุปกรณ์ความปลอดภัยภายนอก เช่น ฟิวส์หรือเซอร์กิตเบรกเกอร์ เพื่อป้องกันความเสียหายที่เกิดจากแหล่งจ่ายไฟภายนอกหรือความผิดพลาดของอุปกรณ์ |
การบำรุงรักษาและการเปลี่ยนส่วนประกอบ
| • เฉพาะผู้เชี่ยวชาญที่ผ่านการฝึกอบรมและผ่านการรับรองเท่านั้นที่ได้รับอนุญาตให้ดำเนินการบำรุงรักษา ตรวจสอบ และเปลี่ยนส่วนประกอบสำหรับ โปรแกรมควบคุม • ตัดแหล่งจ่ายไฟทั้งหมดที่เชื่อมต่อกับตัวควบคุมแบบตั้งโปรแกรมได้ก่อนเดินสายขั้วต่อ • ในระหว่างการบำรุงรักษาและการเปลี่ยนส่วนประกอบ ให้ใช้มาตรการเพื่อป้องกันไม่ให้สกรู สายเคเบิล และวัสดุนำไฟฟ้าอื่นๆ ตกลงไปภายในตัวควบคุมแบบตั้งโปรแกรมได้ |
การกำจัด
| โปรแกรมควบคุมประกอบด้วยโลหะหนัก ทิ้งเศษซากคอนโทรลเลอร์ที่ตั้งโปรแกรมได้ให้เป็นของเสียจากอุตสาหกรรม | |
| ทิ้งเศษผลิตภัณฑ์แยกจากกันที่จุดรวบรวมที่เหมาะสม แต่ห้ามทิ้งในกระแสขยะปกติ |
การแนะนำสินค้า
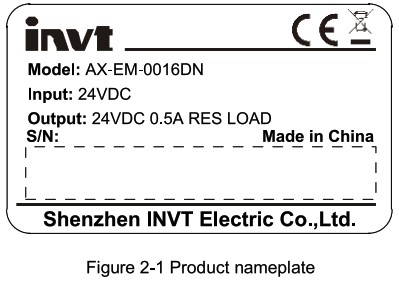
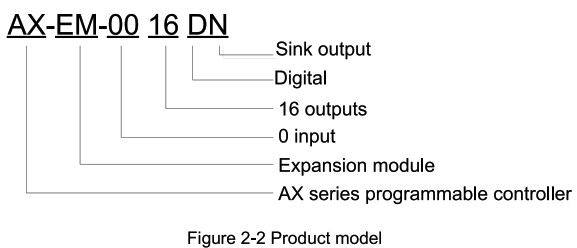
รุ่นและป้าย
ฟังก์ชั่นเหนือview
เนื่องจากเป็นโมดูลควบคุมหลักของตัวควบคุมโปรแกรมได้ โมดูล CPU AX7J-C-1608L (หรือเรียกสั้นๆ ว่า โมดูล CPU) จึงมีฟังก์ชันดังต่อไปนี้:
- ดำเนินการควบคุม การตรวจสอบ การประมวลผลข้อมูลและการสื่อสารเครือข่ายให้กับระบบที่กำลังทำงาน
- รองรับภาษาการเขียนโปรแกรม IL, ST, FBD, LD, CFC และ SFC ที่สอดคล้องกับมาตรฐาน IEC61131-3 โดยใช้แพลตฟอร์ม Invtmatic Studio ที่ INVT เปิดตัวเพื่อการเขียนโปรแกรม
- รองรับโมดูลขยายท้องถิ่น 16 โมดูล (เช่น โมดูล I/O อุณหภูมิ และอนาล็อก)
- ใช้ Ether CAT หรือ CAN open bus เพื่อเชื่อมต่อโมดูลสเลฟ ซึ่งแต่ละตัวรองรับโมดูลขยาย 16 โมดูล (เช่น I/O อุณหภูมิ และโมดูลอนาล็อก)
- รองรับโปรโตคอล Modbus TCP master/slave
- รวมอินเทอร์เฟซ RS485 สองตัว รองรับโปรโตคอล master/slave ของ Modbus RTU
- รองรับ I/O ความเร็วสูง อินพุตความเร็วสูง 16 รายการ และเอาต์พุตความเร็วสูง 8 รายการ
- รองรับการควบคุมการเคลื่อนไหวฟิลด์บัส EtherCAT โดยมีเวลาการซิงโครไนซ์ 1 มิลลิวินาที, 2 มิลลิวินาที, 4 มิลลิวินาที หรือ 8 มิลลิวินาที
- รองรับการควบคุมการเคลื่อนที่แบบแกนเดียวหรือหลายแกนที่ใช้พัลส์ รวมถึงการแทรกสอดเชิงเส้น 2-4 แกนและการแทรกสอดส่วนโค้ง 2 แกน
- รองรับนาฬิกาแบบเรียลไทม์
- รองรับการป้องกันข้อมูลเมื่อไฟฟ้าดับ
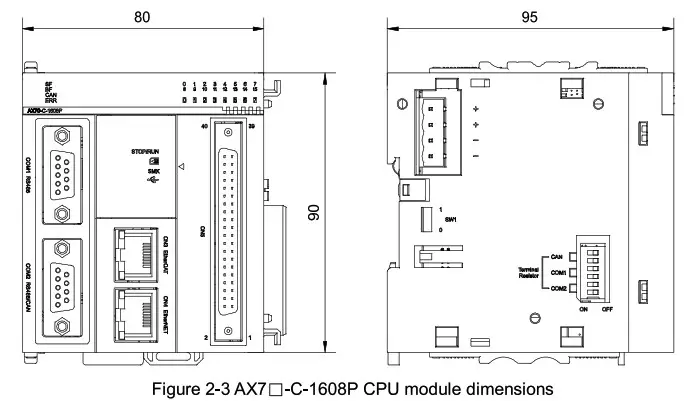
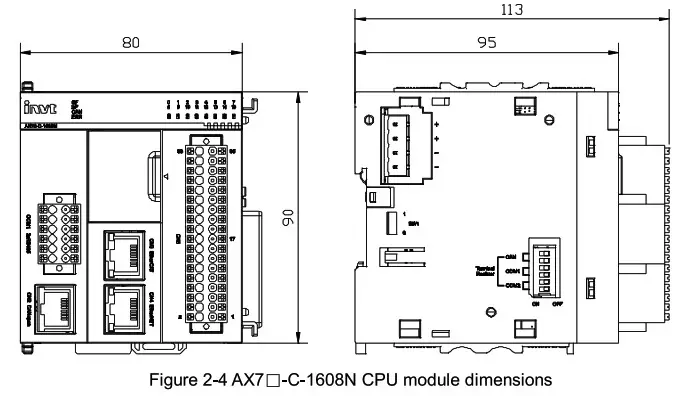
ขนาดโครงสร้าง
ขนาดโครงสร้าง (หน่วย: มม.) แสดงดังรูปต่อไปนี้
อินเทอร์เฟซ
คำอธิบายอินเทอร์เฟซ
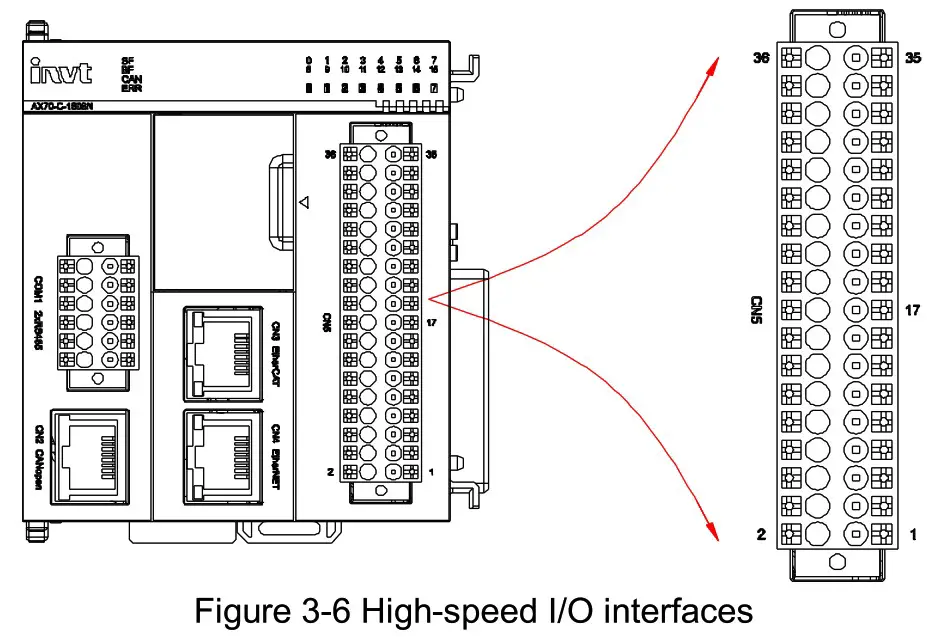
การกระจายอินเทอร์เฟซ
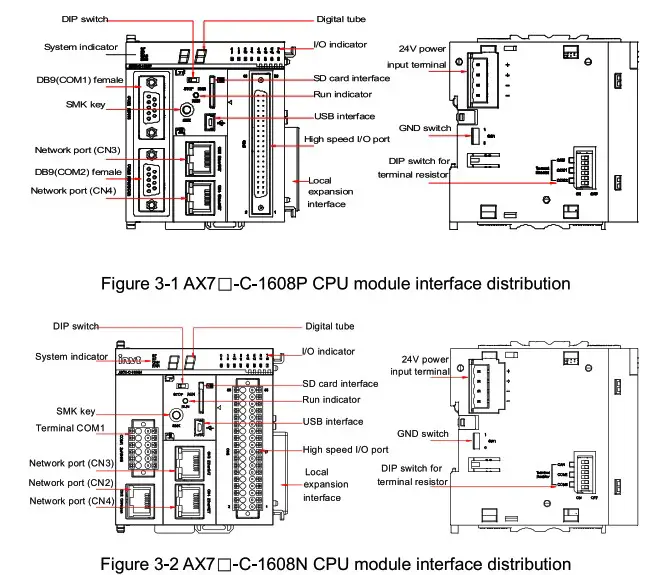
รูปที่ 3-1 และรูปที่ 3-2 แสดงการกระจายอินเทอร์เฟซโมดูลซีพียู สำหรับแต่ละอินเทอร์เฟซ จะมีคำอธิบายแบบซิลค์สกรีนอยู่ใกล้ๆ ซึ่งจะช่วยให้การเดินสาย การทำงาน และการตรวจสอบสะดวกยิ่งขึ้น
| อินเทอร์เฟซ | การทำงาน | |
| สวิตช์ DIP | สวิตช์ DIP RUN/STOP | |
| ตัวบ่งชี้ระบบ | SF: ไฟแสดงความผิดพลาดของระบบ BF: ไฟแสดงความผิดพลาดของบัส CAN: ไฟแสดงความผิดพลาดของบัส CAN ERR: ไฟแสดงความผิดพลาดของโมดูล |
|
| กุญแจ SMK | สมาร์ทคีย์ SMK | |
| วอ-ซี-1608พี | คอม1 (DB9) เพศหญิง |
อินเทอร์เฟซ RS485 หนึ่งตัว รองรับ Modbus RTU โปรโตคอลมาสเตอร์/สเลฟ |
| คอม2 (DB9) เพศหญิง |
อินเทอร์เฟซ RS485 หนึ่งตัวและอินเทอร์เฟซ CAN อีกหนึ่งตัว อินเทอร์เฟซ RS485 รองรับโปรโตคอลมาสเตอร์/สเลฟของ Modbus RTU และอินเทอร์เฟซ CAN อื่นรองรับโปรโตคอลมาสเตอร์/สเลฟ CANopen |
|
| AX70-C-1608N | COM1&COM2 (ขั้วต่อแบบกดเข้า) | อินเทอร์เฟซ RS485 สองอินเทอร์เฟซ รองรับ Modbus RTU โปรโตคอลมาสเตอร์/สเลฟ |
| ซีเอ็น2 (RJ45) | อินเทอร์เฟซ CAN รองรับโปรโตคอลเปิดมาสเตอร์/สเลฟ CAN | |
| ซีเอ็น3 (RJ45) | อินเทอร์เฟซอีเธอร์ CAT | |
| ซีเอ็น4 (RJ45) | 1.โปรโตคอล Modbus TCP 2.ฟังก์ชั่นอีเทอร์เน็ตมาตรฐาน 3.ดาวน์โหลดและแก้ไขโปรแกรมของผู้ใช้ (เฉพาะ IPv4) |
|
| หลอดดิจิตอล | แสดงสัญญาณเตือนและตอบกลับเมื่อกดปุ่ม SMK | |
| ตัวบ่งชี้ไอ/โอ | ระบุว่าสัญญาณจากอินพุต 16 ตัวและเอาต์พุต 8 ตัวถูกต้องหรือไม่ | |
| อินเตอร์เฟซการ์ด SD | ใช้สำหรับเก็บโปรแกรมและข้อมูลของผู้ใช้ | |
| ตัวบ่งชี้การวิ่ง | ระบุว่าโมดูล CPU กำลังทำงานอยู่หรือไม่ | |
| อินเทอร์เฟซ USB | ใช้เพื่อดาวน์โหลดและแก้ไขโปรแกรม | |
| I/O ความเร็วสูง | อินพุตความเร็วสูง 16 ช่องและเอาต์พุตความเร็วสูง 8 ช่อง | |
| อินเทอร์เฟซการขยายท้องถิ่น | รองรับการขยายโมดูล I/O จำนวน 16 โมดูล ไม่อนุญาตให้สลับเปลี่ยนขณะร้อน | |
| อินเทอร์เฟซพลังงาน 24V | DC 24V โวลtagอินพุตอิเล็กทรอนิกส์ | |
| สวิตช์กราวด์ | สวิตช์การเชื่อมต่อระหว่างกราวด์ดิจิทัลภายในระบบและกราวด์ตัวเรือน สวิตช์นี้จะถูกตัดการเชื่อมต่อตามค่าเริ่มต้น (SW1 ตั้งค่าเป็น 0) สวิตช์นี้ใช้เฉพาะในสถานการณ์พิเศษที่ใช้กราวด์ดิจิทัลภายในระบบเป็นระนาบอ้างอิงเท่านั้น โปรดใช้ความระมัดระวังก่อนใช้งาน มิฉะนั้น ความเสถียรของระบบจะได้รับผลกระทบ | |
| สวิตช์ DIP ของตัวต้านทานขั้ว | เปิด หมายถึงการเชื่อมต่อตัวต้านทานขั้ว (โดยค่าเริ่มต้นจะเป็นปิด) COM1 สอดคล้องกับ RS485-1, COM2 สอดคล้องกับ RS485-2 และ CAN สอดคล้องกับ CAN | |
กุญแจ SMK
คีย์ SMK ใช้เพื่อรีเซ็ตที่อยู่ IP ของโมดูล CPU (rP) และล้างโปรแกรมแอปพลิเคชัน (cA) ที่อยู่โมดูล CPU เริ่มต้นคือ 192.168.1.10 หากคุณต้องการคืนค่าที่อยู่เริ่มต้นจากที่อยู่ IP ที่แก้ไข คุณสามารถคืนค่าที่อยู่เริ่มต้นได้โดยใช้คีย์ SMK วิธีการมีดังนี้:
- ตั้งค่าโมดูล CPU เป็นสถานะ STOP กดปุ่ม SMK เมื่อหลอดดิจิตอลแสดง “rP” ให้กดปุ่ม SMK ค้างไว้ จากนั้นหลอดดิจิตอลจะแสดง “rP” และปิดสลับกัน แสดงว่ากำลังรีเซ็ตที่อยู่ IP การรีเซ็ตจะสำเร็จเมื่อหลอดดิจิตอลปิดอยู่ หากคุณปล่อยปุ่ม SMK ในตอนนี้ หลอดดิจิตอลจะแสดง “rP” กดปุ่ม SMK ค้างไว้จนกระทั่งหลอดแสดง “00” (rP—cA—rU-rP)
- ถ้าคุณปล่อยปุ่ม SMK ในระหว่างกระบวนการที่หลอดดิจิทัลแสดง “rP” และปิดสลับกัน การดำเนินการรีเซ็ตที่อยู่ IP จะถูกยกเลิกและหลอดดิจิทัลจะแสดง “rP”
หากต้องการล้างโปรแกรมออกจากโมดูล CPU ให้ทำดังต่อไปนี้:
กดปุ่ม SMK เมื่อหลอดดิจิตอลแสดง “cA” ให้กดปุ่ม SMK ค้างไว้ จากนั้นหลอดดิจิตอลจะแสดง “rP” และปิดสลับกัน แสดงว่าโปรแกรมกำลังถูกเคลียร์ เมื่อหลอดดิจิตอลปิดอยู่ ให้รีสตาร์ทโมดูล CPU โปรแกรมจะถูกเคลียร์สำเร็จ
คำอธิบายหลอดดิจิตอล
- หากโปรแกรมไม่มีข้อผิดพลาดหลังจากดาวน์โหลด หลอดดิจิตอลของโมดูล CPU จะแสดง “00” อย่างต่อเนื่อง
- หากโปรแกรมมีข้อผิดพลาด หลอดดิจิตอลจะแสดงข้อมูลข้อผิดพลาดโดยการกะพริบ
- เช่นampหากเกิดข้อผิดพลาด 19 ขึ้นเท่านั้น หลอดดิจิตอลจะแสดง “19” และปิดสลับกัน หากเกิดข้อผิดพลาด 19 และข้อผิดพลาด 29 พร้อมกัน หลอดดิจิตอลจะแสดง “19” ปิด แสดง “29” และปิดสลับกัน หากเกิดข้อผิดพลาดพร้อมกันหลายรายการ วิธีการแสดงจะคล้ายกัน
คำจำกัดความของเทอร์มินัล
AX7![]() -คำจำกัดความของเทอร์มินัลการสื่อสาร COM1608/COM1 C-2P
-คำจำกัดความของเทอร์มินัลการสื่อสาร COM1608/COM1 C-2P
สำหรับโมดูล CPU AX7LJ-C-1608P นั้น COM1 คือเทอร์มินัลการสื่อสาร RS485 และ COM2 คือเทอร์มินัลการสื่อสาร RS485/CAN ซึ่งทั้งสองใช้ขั้วต่อ DB9 สำหรับการส่งข้อมูล อินเทอร์เฟซและพินมีรายละเอียดดังต่อไปนี้
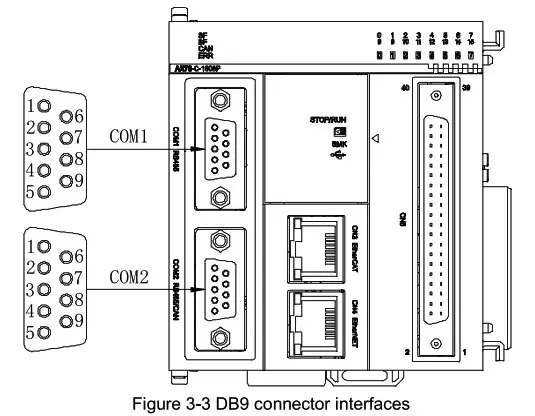
ตาราง 3-1 พินตัวเชื่อมต่อ COM1/COM2 DB39
| อินเทอร์เฟซ | การกระจาย | เข็มหมุด | คำนิยาม | การทำงาน |
| คอม1 (อาร์เอส485) |
1 | / | / | |
| 2 | / | / | ||
| 3 | / | / | ||
| 4 | RS485A | RS485 สัญญาณดิฟเฟอเรนเชียล + | ||
| 5 | RS485B | สัญญาณดิฟเฟอเรนเชียล RS485 – | ||
| 6 | / | / | ||
| 7 | / | / | ||
| 8 | / | / | ||
| 9 | GND_RS485 | สายดินไฟฟ้า RS485 | ||
| คอม2 (RS485/แคนาดา) |
1 | / | / | |
| 2 | สามารถ _L | สัญญาณที่แตกต่างกัน CAN – | ||
| 3 | / | / | ||
| 4 | RS485A | RS485 สัญญาณดิฟเฟอเรนเชียล + | ||
| 5 | RS485B | สัญญาณดิฟเฟอเรนเชียล RS485 – | ||
| 6 | GND_แคน | สามารถต่อสายดินได้ | ||
| 7 | สามารถ _H | สัญญาณต่าง CAN+ | ||
| 8 | / | / | ||
| 9 | GND_RS485 | สายดินไฟฟ้า RS485 |
AX7![]() -C-1608P คำจำกัดความของเทอร์มินัล I/O ความเร็วสูง
-C-1608P คำจำกัดความของเทอร์มินัล I/O ความเร็วสูง
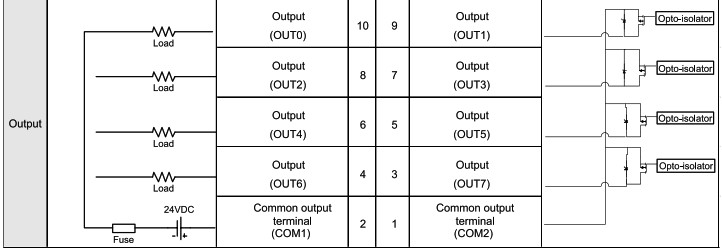
AX7![]() โมดูล CPU รุ่น C-1608P มีอินพุตความเร็วสูง 16 ตัวและเอาต์พุตความเร็วสูง 8 ตัว อินเทอร์เฟซและพินมีรายละเอียดดังต่อไปนี้
โมดูล CPU รุ่น C-1608P มีอินพุตความเร็วสูง 16 ตัวและเอาต์พุตความเร็วสูง 8 ตัว อินเทอร์เฟซและพินมีรายละเอียดดังต่อไปนี้
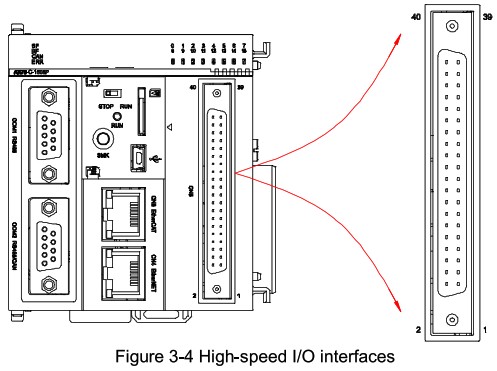
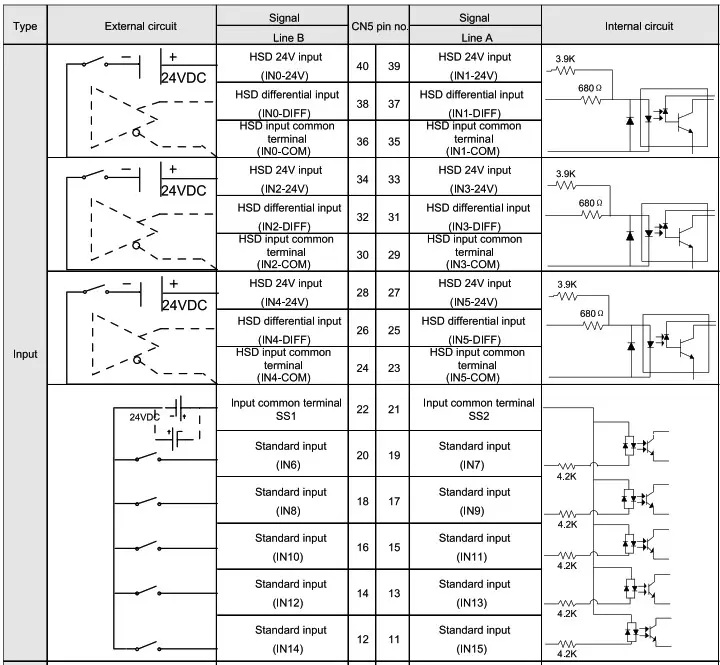
ตาราง 3-2 พิน I/O ความเร็วสูง
AX7![]() -คำจำกัดความของเทอร์มินัลการสื่อสาร COM1608/CN1 C-2N
-คำจำกัดความของเทอร์มินัลการสื่อสาร COM1608/CN1 C-2N
สำหรับ AX7![]() โมดูล CPU C-1608N, COM1 เป็นเทอร์มินัลการสื่อสาร RS485 สองช่องสัญญาณ โดยใช้ขั้วต่อแบบกดเข้า 12 พินสำหรับการส่งข้อมูล CN2 เป็นเทอร์มินัลการสื่อสาร CAN ที่ใช้ขั้วต่อ RJ45 สำหรับการส่งข้อมูล อินเทอร์เฟซและพินต่างๆ มีรายละเอียดดังต่อไปนี้
โมดูล CPU C-1608N, COM1 เป็นเทอร์มินัลการสื่อสาร RS485 สองช่องสัญญาณ โดยใช้ขั้วต่อแบบกดเข้า 12 พินสำหรับการส่งข้อมูล CN2 เป็นเทอร์มินัลการสื่อสาร CAN ที่ใช้ขั้วต่อ RJ45 สำหรับการส่งข้อมูล อินเทอร์เฟซและพินต่างๆ มีรายละเอียดดังต่อไปนี้

ตาราง 3-3 พินเชื่อมต่อ COM1/ CN2
| ฟังก์ชันเทอร์มินัลแบบกดของ COM1 | ||||
| คำนิยาม | การทำงาน | เข็มหมุด | ||
| COM1 RS485 | A | สัญญาณที่แตกต่างกัน RS485 + |
12 | |
| B | สัญญาณดิฟเฟอเรนเชียล RS485 – | 10 | ||
| ก.ย.ด. | ชิป RS485 _1 กำลังไฟ พื้น |
8 | ||
| PE | โล่กราวด์ | 6 | ||
| COM2 RS485 | A | สัญญาณที่แตกต่างกัน RS485 + |
11 | |
| B | สัญญาณดิฟเฟอเรนเชียล RS485 – | 9 | ||
| ก.ย.ด. | ชิป RS485_2 มีพลัง พื้น |
7 | ||
| PE | โล่กราวด์ | 5 | ||
| หมายเหตุ: พิน 1-4 ไม่ถูกใช้ | ||||
| ฟังก์ชันพินของ CN2 | ||||
| คำนิยาม | การทำงาน | เข็มหมุด | ||
| สามารถเปิด | ก.ย.ด. | สามารถต่อสายดินได้ | 1 | |
| CAN_L | สัญญาณที่แตกต่างกัน CAN – | 7 | ||
| สามารถ_H | สัญญาณต่าง CAN+ | 8 | ||
| หมายเหตุ: พิน 2-6 ไม่ถูกใช้ | ||||
AX7![]() -C-1608N คำจำกัดความของเทอร์มินัล I/O ความเร็วสูง
-C-1608N คำจำกัดความของเทอร์มินัล I/O ความเร็วสูง
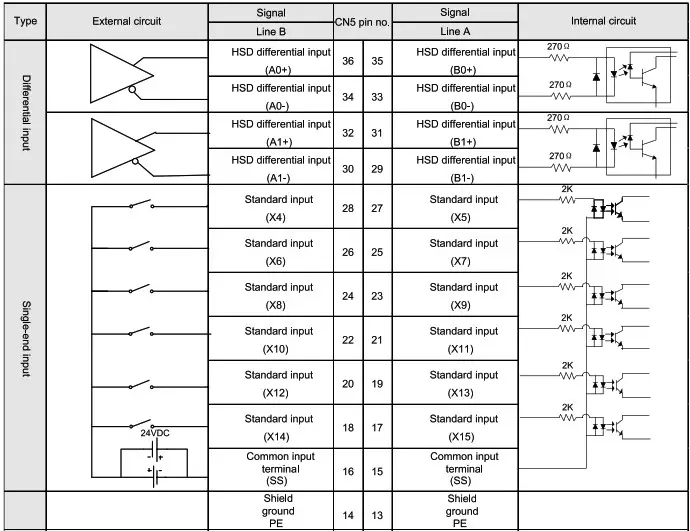
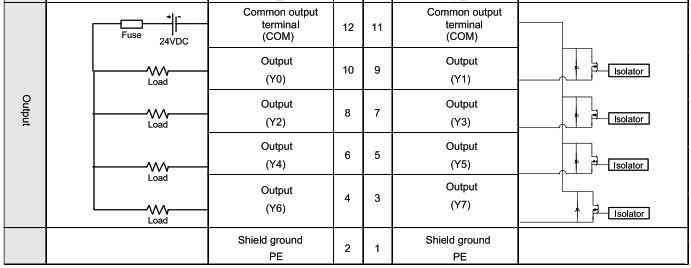
AX7![]() โมดูล CPU 1-C-1608N มีอินพุตความเร็วสูง 16 ตัวและเอาต์พุตความเร็วสูง 8 ตัว รูปภาพต่อไปนี้แสดงการกระจายของขั้วต่อและตารางต่อไปนี้แสดงรายการพิน
โมดูล CPU 1-C-1608N มีอินพุตความเร็วสูง 16 ตัวและเอาต์พุตความเร็วสูง 8 ตัว รูปภาพต่อไปนี้แสดงการกระจายของขั้วต่อและตารางต่อไปนี้แสดงรายการพิน
ตาราง 3-4 พิน I/O ความเร็วสูง
บันทึก:
- ช่องอินพุตทั้งหมด 16 ช่องของ AX7
 -โมดูล CPU C-1608P อนุญาตให้มีอินพุตความเร็วสูง แต่ 6 ช่องแรกรองรับอินพุตแบบ single-end หรือ differential 24V และ 10 ช่องสุดท้ายรองรับอินพุตแบบ single-end 24V
-โมดูล CPU C-1608P อนุญาตให้มีอินพุตความเร็วสูง แต่ 6 ช่องแรกรองรับอินพุตแบบ single-end หรือ differential 24V และ 10 ช่องสุดท้ายรองรับอินพุตแบบ single-end 24V - ช่องอินพุตทั้งหมด 16 ช่องของ AX7-โมดูล CPU C-1608N อนุญาตให้มีอินพุตความเร็วสูง แต่ 4 ช่องแรกรองรับอินพุตแบบดิฟเฟอเรนเชียล และ 12 ช่องสุดท้ายรองรับอินพุตแบบปลายเดียว 24V
- จุด I/O แต่ละจุดจะแยกออกจากวงจรภายใน
- ความยาวรวมของสายเคเบิลเชื่อมต่อพอร์ต I/O ความเร็วสูงต้องไม่เกิน 3 เมตร
- ห้ามดัดสายเคเบิลขณะยึดสายเคเบิล
- ระหว่างการเดินสาย ให้แยกสายเชื่อมต่อออกจากสายกำลังสูงที่ก่อให้เกิดการรบกวนอย่างรุนแรง แต่ไม่ควรผูกสายเชื่อมต่อกับสายกำลังสูงเข้าด้วยกัน นอกจากนี้ ควรหลีกเลี่ยงการเดินสายขนานในระยะไกล
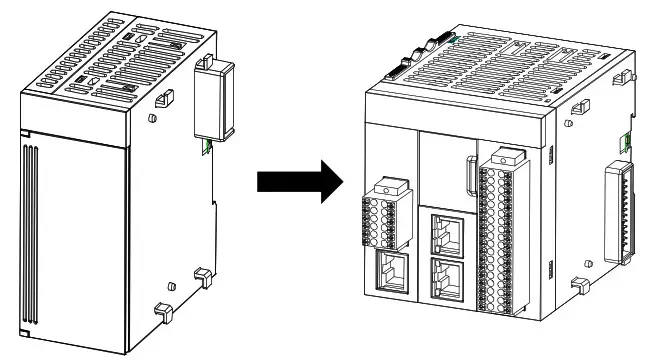
การติดตั้งโมดูล
การใช้การออกแบบแบบโมดูลาร์ทำให้ตัวควบคุมแบบตั้งโปรแกรมได้ติดตั้งและบำรุงรักษาได้ง่าย สำหรับโมดูลซีพียู วัตถุเชื่อมต่อหลักคือแหล่งจ่ายไฟและโมดูลขยาย
โมดูลเชื่อมต่อกันโดยใช้อินเตอร์เฟสการเชื่อมต่อที่โมดูลให้มาและสแน็ปอิน
ขั้นตอนการติดตั้งมีดังนี้:
| ขั้นตอนที่ 1 เลื่อนตัวล็อคเข้าที่โมดูล CPU ตามทิศทางที่แสดงในรูปต่อไปนี้ (โดยใช้โมดูลพลังงาน การเชื่อมต่อสำหรับอดีตample) |
ขั้นตอนที่ 2 จัดตำแหน่งโมดูล CPU ให้ตรงกับขั้วต่อโมดูลพลังงานเพื่อประสานกัน |
 |
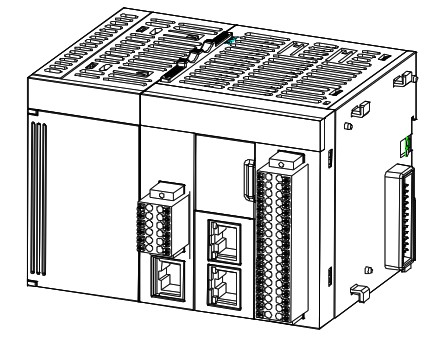 |
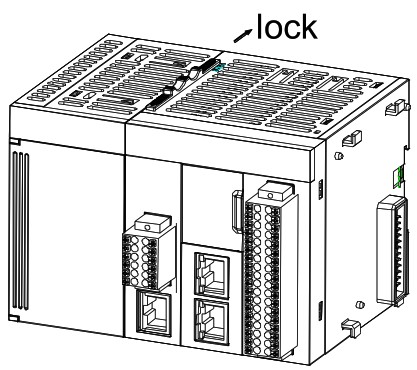
| ขั้นตอนที่ 3 เลื่อนตัวล็อคแบบสแน็ปบนโมดูล CPU ตามทิศทางที่แสดงในรูปต่อไปนี้เพื่อเชื่อมต่อและล็อคโมดูลทั้งสองตัว | ขั้นตอนที่ 4 สำหรับการติดตั้งรางปีกนกแบบมาตรฐาน ให้เกี่ยวโมดูลที่เกี่ยวข้องเข้ากับรางติดตั้งมาตรฐานจนกระทั่งตัวล็อกเข้าที่ |
 |
 |
การเชื่อมต่อสายเคเบิลและข้อมูลจำเพาะ
การเชื่อมต่อบัส CAT อีเธอร์
ข้อมูลจำเพาะบัส CAT อีเธอร์
| รายการ | คำอธิบาย |
| โปรโตคอลการสื่อสาร | อีเธอร์ CAT |
| บริการที่รองรับ | ใบรับรองแพทย์ (PDO/SDO) |
| ช่วงเวลาการซิงโครไนซ์ขั้นต่ำ | 1ms/4 แกน (ค่าทั่วไป) |
| วิธีการซิงโครไนซ์ | DC สำหรับการซิงค์/DC ไม่ได้ใช้ |
| ชั้นกายภาพ | 100BASE-TX |
| โหมดดูเพล็กซ์ | ฟูลดูเพล็กซ์ |
| โครงสร้างโทโพโลยี | การเชื่อมต่อแบบอนุกรม |
| สื่อส่งข้อมูล | สายเคเบิลเครือข่าย (ดูส่วน “การเลือกสายเคเบิล”) |
| ระยะการส่งข้อมูล | ระยะห่างระหว่างสองโหนดไม่เกิน 100 เมตร |
| จำนวนโหนดสเลฟ | สูงถึง 125 |
| ความยาวเฟรมอีเธอร์ CAT | 44 ไบต์-1498 ไบต์ |
| ประมวลผลข้อมูล | เฟรมเดียวมีข้อมูลสูงสุด 1486 ไบต์ |
การเลือกใช้สายเคเบิล
โมดูล CPU สามารถนำการสื่อสารผ่านบัส Ether CAT มาใช้ผ่านพอร์ต CN3 ได้ ขอแนะนำให้ใช้สายเคเบิลมาตรฐาน INVT หากคุณผลิตสายเคเบิลสื่อสารด้วยตัวเอง โปรดตรวจสอบว่าสายเคเบิลเป็นไปตามข้อกำหนดต่อไปนี้:
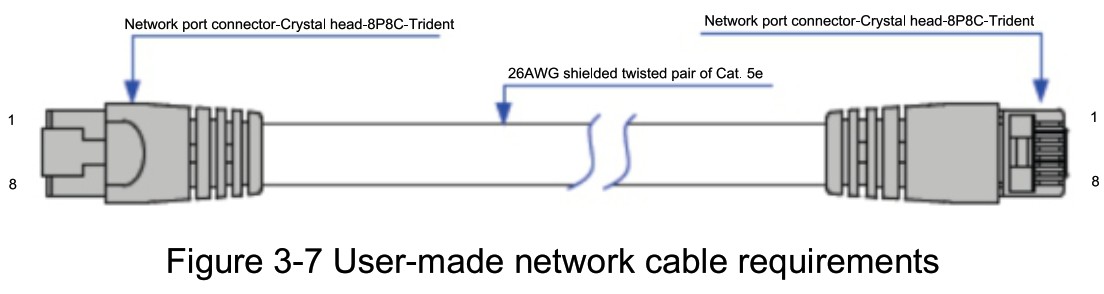
บันทึก:
- สายสื่อสารที่คุณใช้จะต้องผ่านการทดสอบการนำไฟฟ้า 100% โดยไม่เกิดไฟฟ้าลัดวงจร วงจรเปิด การเคลื่อนตัว หรือการสัมผัสที่ไม่ดี
- เพื่อให้แน่ใจถึงคุณภาพการสื่อสาร ความยาวสายเคเบิลสื่อสาร EtherCAT จะต้องไม่เกิน 100 เมตร
- เราขอแนะนำให้สร้างสายเคเบิลสื่อสารโดยใช้สายเคเบิลคู่บิดเกลียวพร้อมฉนวนป้องกันประเภท 5e ที่สอดคล้องกับมาตรฐาน EIA/TIA568A, EN50173, ISO/IEC11801, จดหมายข่าว EIA/TIA TSB และ EIA/TIA SB40-A&TSB36
สามารถเปิดการเชื่อมต่อสายเคเบิลได้
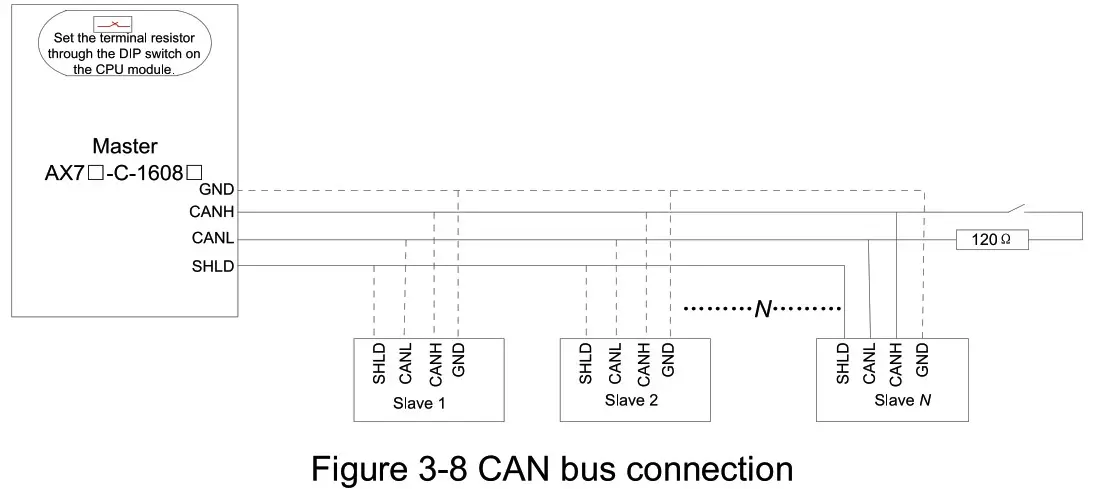
การสร้างเครือข่าย
โครงสร้างโทโพโลยีการเชื่อมต่อบัส CAN แสดงไว้ในรูปต่อไปนี้ ขอแนะนำให้ใช้สายคู่บิดหุ้มฉนวนสำหรับการเชื่อมต่อบัส CAN ปลายแต่ละด้านของบัส CAN เชื่อมต่อกับตัวต้านทานขั้ว 1200 เพื่อป้องกันการสะท้อนสัญญาณ ในกรณีส่วนใหญ่ ชั้นป้องกันจะใช้การต่อลงดินแบบจุดเดียว
การเลือกใช้สายเคเบิล
- สำหรับ AX7โมดูล CPU C-1608P ใช้ขั้วต่อเดียวกันสำหรับการสื่อสาร CANopen และการสื่อสาร RS485 โดยใช้ขั้วต่อ DB9 สำหรับการส่งข้อมูล พินในขั้วต่อ DB9 ได้รับการอธิบายไว้ก่อนหน้านี้
- สำหรับ AX7โมดูล CPU 1-C-1608N ขั้วต่อ RJ45 ใช้สำหรับการสื่อสาร CANopen สำหรับการส่งข้อมูล พินในขั้วต่อ RJ45 ได้รับการอธิบายไว้ก่อนหน้านี้
ขอแนะนำให้ใช้สายเคเบิลมาตรฐาน INVT หากคุณผลิตสายเคเบิลสื่อสารด้วยตัวเอง ให้ผลิตสายเคเบิลตามคำอธิบายของพินและตรวจสอบให้แน่ใจว่ากระบวนการผลิตและพารามิเตอร์ทางเทคนิคเป็นไปตามข้อกำหนดการสื่อสาร
บันทึก:
- เพื่อเพิ่มความสามารถในการป้องกันการรบกวนของสายเคเบิล เราขอแนะนำให้ใช้เทคนิคการป้องกันด้วยฟอยล์อะลูมิเนียมและการป้องกันด้วยการถักอะลูมิเนียมและแมกนีเซียมในการผลิตสายเคเบิล
- ใช้เทคนิคการพันสายคู่บิดเกลียวสำหรับสายเคเบิลแบบต่างกัน
การเชื่อมต่อการสื่อสารแบบอนุกรม RS485
โมดูล CPU รองรับช่องทางการสื่อสาร RS2 485 ช่อง
- สำหรับ AX7โมดูล CPU C-1608P พอร์ต COM1 และ COM2 ใช้ขั้วต่อ DB9 สำหรับการส่งข้อมูล พินในขั้วต่อ DB9 ได้รับการอธิบายไว้ก่อนหน้านี้
- สำหรับ AX7โมดูล CPU C-1608N พอร์ตใช้ขั้วต่อแบบกดเข้า 12 พินสำหรับการส่งข้อมูล พินในขั้วต่อเทอร์มินัลได้รับการอธิบายไว้ก่อนหน้านี้
ขอแนะนำให้ใช้สายเคเบิลมาตรฐาน INVT หากคุณผลิตสายเคเบิลสื่อสารด้วยตัวเอง ให้ผลิตสายเคเบิลตามคำอธิบายของพินและตรวจสอบให้แน่ใจว่ากระบวนการผลิตและพารามิเตอร์ทางเทคนิคเป็นไปตามข้อกำหนดการสื่อสาร
บันทึก:
- เพื่อเพิ่มความสามารถในการป้องกันการรบกวนของสายเคเบิล เราขอแนะนำให้ใช้เทคนิคการป้องกันด้วยฟอยล์อะลูมิเนียมและการป้องกันด้วยการถักอะลูมิเนียมและแมกนีเซียมในการผลิตสายเคเบิล
- ใช้เทคนิคการพันสายคู่บิดเกลียวสำหรับสายเคเบิลแบบต่างกัน
การเชื่อมต่ออีเทอร์เน็ต
การสร้างเครือข่าย
พอร์ตอีเทอร์เน็ตของโมดูล CPU คือ CN4 ซึ่งสามารถเชื่อมต่อกับอุปกรณ์อื่น เช่น คอมพิวเตอร์หรืออุปกรณ์ HMI โดยใช้สายเคเบิลเครือข่ายในโหมดจุดต่อจุด
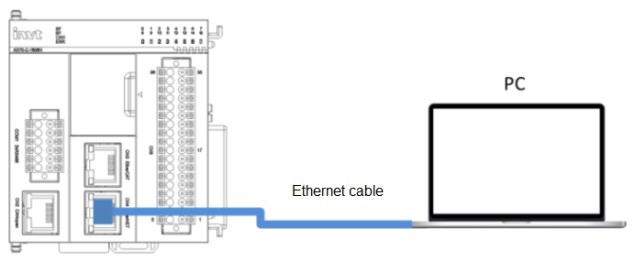
รูปที่ 3-9 การเชื่อมต่ออีเทอร์เน็ต
คุณยังสามารถเชื่อมต่อพอร์ตอีเทอร์เน็ตเข้ากับฮับหรือสวิตช์ได้โดยใช้สายเคเบิลเครือข่าย ซึ่งถือเป็นการเชื่อมต่อแบบหลายจุด

รูปที่ 3-10 เครือข่ายอีเธอร์เน็ต
การเลือกใช้สายเคเบิล
เพื่อปรับปรุงความน่าเชื่อถือของการสื่อสาร ให้ใช้สายเคเบิลคู่บิดเกลียวหุ้มฉนวนประเภท 5 ขึ้นไปเป็นสายเคเบิลอีเทอร์เน็ต แนะนำให้ใช้สายเคเบิลมาตรฐาน INVT
คำแนะนำการใช้งาน
พารามิเตอร์ทางเทคนิค
ข้อมูลจำเพาะทั่วไปของโมดูลซีพียู
| รายการ | คำอธิบาย | |||||
| ปริมาณอินพุตtage | 24VDC | |||||
| การใช้พลังงาน | < 15 วัตต์ | |||||
| ไฟฟ้าขัดข้อง เวลาคุ้มครอง |
300ms (ไม่มีการป้องกันภายใน 20 วินาทีหลังจากเปิดเครื่อง) | |||||
| แบตเตอรี่สำรองของ นาฬิกาตามเวลาจริง |
รองรับ | |||||
| กำลังไฟของบัสแบ็คเพลน จัดหา |
5V/2.5A | |||||
| วิธีการเขียนโปรแกรม | ภาษาการเขียนโปรแกรม IEC 61131-3 (LD, FBD, IL, ST, SFC, และซีเอฟซี) |
|||||
| การดำเนินการโปรแกรม วิธี |
ออนไลน์ท้องถิ่น | |||||
| การเก็บข้อมูลโปรแกรมของผู้ใช้ ช่องว่าง |
10MB | |||||
| พื้นที่หน่วยความจำแฟลช สำหรับไฟฟ้าดับ การป้องกัน |
512KB | |||||
| การ์ด SD ข้อมูลจำเพาะ |
ไมโครเอสดี 32G | |||||
| องค์ประกอบที่อ่อนนุ่มและ ลักษณะเฉพาะ |
||||||
| องค์ประกอบ | ชื่อ | นับ | ลักษณะการจัดเก็บ | |||
| ค่าเริ่มต้น | เขียนได้ | คำอธิบาย | ||||
| I | รีเลย์อินพุต | 64 กิโลวัตต์ | ไม่บันทึก | เลขที่ | X: 1 บิต B. 8 บิต W: 16 บิต D: 32 บิต L: 64 บิต | |
| Q | รีเลย์เอาต์พุต | 64 กิโลวัตต์ | ไม่บันทึก | เลขที่ | ||
| M | เอาท์พุตเสริม | 256 กิโลวัตต์ | บันทึก | ใช่ | ||
| การเก็บรักษาโปรแกรม วิธีการตามอำนาจ ความล้มเหลว |
การยึดเกาะด้วยแฟลชภายใน | |||||
| โหมดการขัดจังหวะ | สัญญาณ DI ความเร็วสูงของโมดูล CPU สามารถตั้งค่าให้เป็นอินพุตการขัดจังหวะได้ โดยให้อินพุตได้สูงสุด 8 จุด และสามารถตั้งค่าโหมดการขัดจังหวะขอบขึ้นและขอบลงได้ | |||||
ข้อมูลจำเพาะ I/O ความเร็วสูง
ข้อมูลจำเพาะอินพุตความเร็วสูง
| รายการ | Specifcations | |
| ชื่อสัญญาณ | อินพุตแบบเฟืองท้ายความเร็วสูง | อินพุตปลายเดียวความเร็วสูง |
| อินพุตที่ได้รับการจัดอันดับ เล่มtage |
2.5โวลต์ | 24VDC (-15% — +20%, เต้นเป็นจังหวะ ภายใน 5%) |
| อินพุตที่ได้รับการจัดอันดับ ปัจจุบัน |
6.8มิลลิแอมป์ | 5.7mA (ค่าทั่วไป) (ที่ 24V DC) |
| ในปัจจุบัน | / | น้อยกว่า 2mA |
| ปิดปัจจุบัน | / | น้อยกว่า 1mA |
| ความต้านทานอินพุต | 5400 | 2.2k0 |
| การนับสูงสุด ความเร็ว |
800K พัลส์/วินาที (ความถี่ 2PH สี่เท่า) 200kHz (ช่องอินพุตเดียว) | |
| หน้าที่อินพุต 2PH อัตราส่วน |
40%. 60% | |
| ขั้วต่อทั่วไป | / | ใช้ขั้วทั่วไปหนึ่งอัน |
ข้อมูลจำเพาะเอาต์พุตความเร็วสูง
| รายการ | ข้อมูลจำเพาะ |
| ชื่อสัญญาณ | เอาท์พุต (YO—Y7) |
| ขั้วเอาท์พุท | AX7 AX7 |
| วงจรควบคุมปริมาตรtage | กระแสตรง 5V-24V |
| กระแสโหลดที่กำหนด | 100mA/จุด, 1A/COM |
| แม็กซ์ ฉบับที่tagอีดรอปที่ออน | 0.2V (ค่าทั่วไป) |
| กระแสไฟรั่วที่ OFF | น้อยกว่า 0.1mA |
| ความถี่เอาท์พุต | 200kHz (เอาต์พุต 200kHz ต้องใช้โหลดเทียบเท่าที่เชื่อมต่อภายนอกมากกว่า 12mA) |
| ขั้วต่อทั่วไป | ทุกๆ 8 จุดใช้ขั้วต่อร่วมหนึ่งจุด |
บันทึก:
- พอร์ต I/O ความเร็วสูงมีข้อจำกัดเกี่ยวกับความถี่ที่อนุญาต หากความถี่อินพุตหรือเอาต์พุตเกินค่าที่อนุญาต การควบคุมและการระบุอาจผิดปกติ จัดเรียงพอร์ต I/O อย่างเหมาะสม
- อินเทอร์เฟซอินพุตแบบดิฟเฟอเรนเชียลความเร็วสูงไม่ยอมรับระดับอินพุตแรงดันดิฟเฟอเรนเชียลที่มากกว่า 7V มิฉะนั้น วงจรอินพุตอาจเสียหายได้
การแนะนำและดาวน์โหลดซอฟต์แวร์การเขียนโปรแกรม
การแนะนำซอฟต์แวร์การเขียนโปรแกรม
INVTMATIC Studio คือซอฟต์แวร์การเขียนโปรแกรมคอนโทรลเลอร์ที่ตั้งโปรแกรมได้ที่ INVT พัฒนาขึ้น ซอฟต์แวร์นี้มอบสภาพแวดล้อมการพัฒนาโปรแกรมที่เปิดกว้างและบูรณาการเต็มรูปแบบพร้อมเทคโนโลยีขั้นสูงและฟังก์ชันอันทรงพลังสำหรับการพัฒนาโครงการซึ่งใช้ภาษาการเขียนโปรแกรมที่สอดคล้องกับ IEC 61131-3 ซอฟต์แวร์นี้ใช้กันอย่างแพร่หลายในอุตสาหกรรมพลังงาน การขนส่ง เทศบาล โลหะวิทยา เคมีภัณฑ์ ยา อาหาร สิ่งทอ บรรจุภัณฑ์ การพิมพ์ ยางและพลาสติก เครื่องมือกล และอุตสาหกรรมที่คล้ายคลึงกัน
สภาพแวดล้อมการทำงานและการดาวน์โหลด
คุณสามารถติดตั้ง Invtmatic Studio บนเดสก์ท็อปหรือคอมพิวเตอร์พกพาที่มีระบบปฏิบัติการ Windows 7 ขึ้นไป พื้นที่หน่วยความจำอย่างน้อย 2GB พื้นที่ว่างฮาร์ดแวร์อย่างน้อย 10GB และความถี่หลักของ CPU สูงกว่า 2GHz จากนั้นคุณสามารถเชื่อมต่อคอมพิวเตอร์ของคุณกับโมดูล CPU ของตัวควบคุมโปรแกรมผ่านสายเคเบิลเครือข่ายและแก้ไขโปรแกรมของผู้ใช้ผ่านซอฟต์แวร์ Invtmatic Studio เพื่อให้คุณสามารถดาวน์โหลดและดีบักโปรแกรมของผู้ใช้ได้
ตัวอย่างการเขียนโปรแกรม
ต่อไปนี้จะอธิบายวิธีการเขียนโปรแกรมโดยใช้ exampเล (AX72-C-1608N)
ก่อนอื่น ให้เชื่อมต่อโมดูลฮาร์ดแวร์ทั้งหมดของตัวควบคุมโปรแกรมได้ รวมถึงเชื่อมต่อแหล่งจ่ายไฟกับโมดูล CPU เชื่อมต่อโมดูล CPU กับคอมพิวเตอร์ที่ติดตั้ง Invtmatic Studio และโมดูลขยายที่จำเป็น และเชื่อมต่อบัส EtherCAT กับไดรฟ์มอเตอร์ เริ่ม Invtmatic Studio เพื่อสร้างโปรเจ็กต์และกำหนดค่าการเขียนโปรแกรม
ขั้นตอนปฏิบัติมีดังต่อไปนี้:
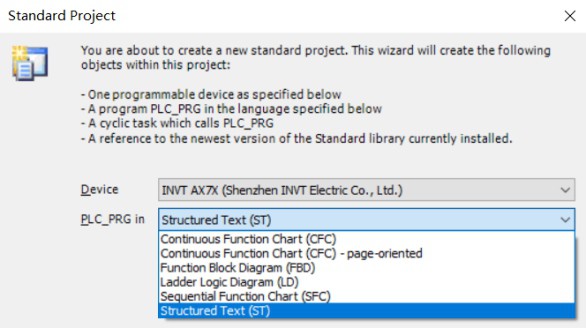
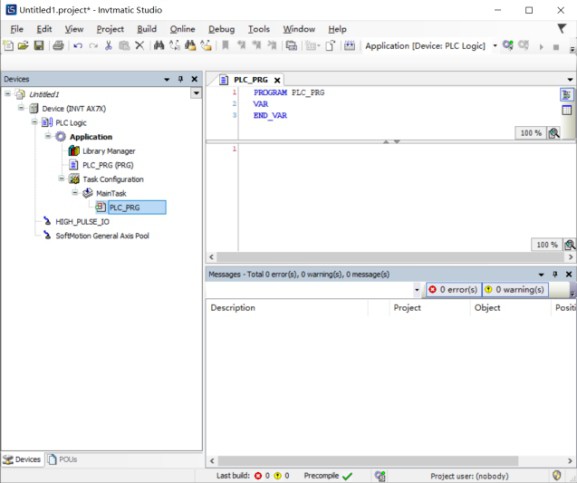
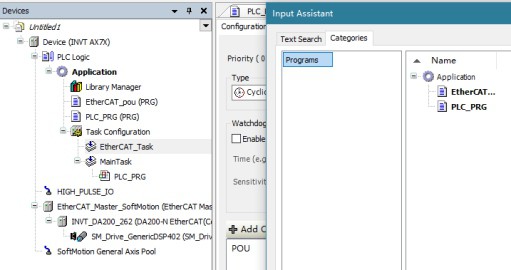
ขั้นตอนที่ 1 เลือก File > สร้างโปรเจ็กต์ใหม่ เลือกประเภทโปรเจ็กต์มาตรฐาน และตั้งค่าตำแหน่งและชื่อในการบันทึกโปรเจ็กต์ คลิกตกลง จากนั้นเลือกอุปกรณ์ INVT AX7X และภาษาการเขียนโปรแกรม Structured Text (ST) ในหน้าต่างกำหนดค่าโปรเจ็กต์มาตรฐานที่ปรากฏขึ้น อินเทอร์เฟซการกำหนดค่าและการเขียนโปรแกรม CODESYS จะปรากฏขึ้น
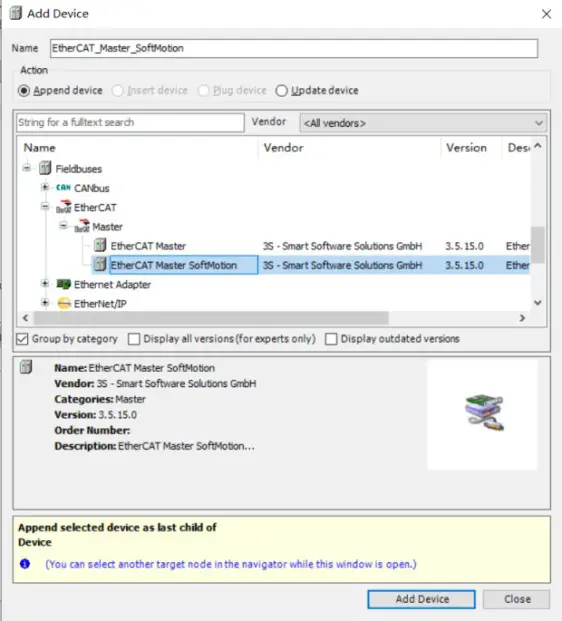
ขั้นตอนที่ 2 คลิกขวาที่แผนผังการนำทางอุปกรณ์ จากนั้นเลือก Add Device เลือก Ether CAT Master Soft Motion
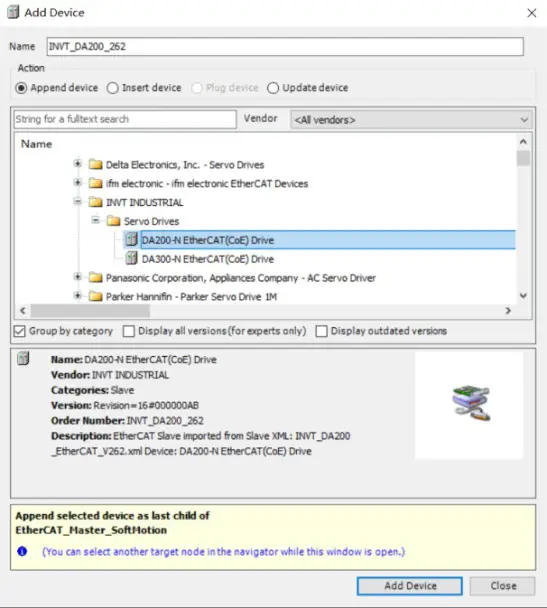
ขั้นตอนที่ 3 คลิกขวา อีเธอร์แคท_มาสเตอร์_ซอฟท์โมชั่น ในแผนผังการนำทางด้านซ้าย เลือก Add Device เลือก DA200-N Ether CAT(CoE) Drive ในหน้าต่างที่ปรากฏขึ้น
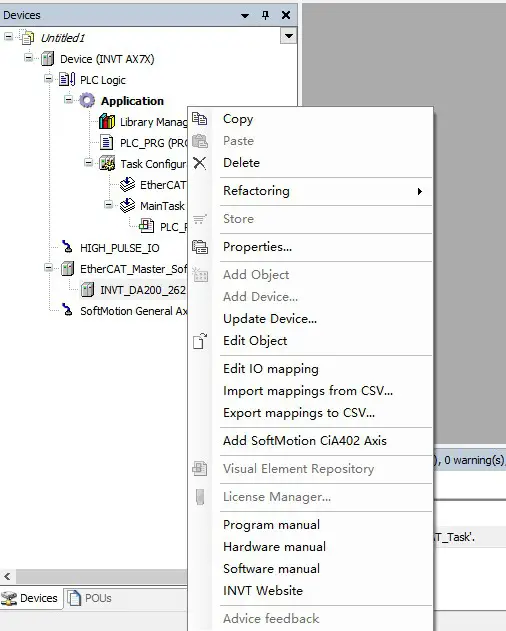
ขั้นตอนที่ 4 เลือก Add SoftMotion CiA402 Axis ในเมนูทางลัดที่ปรากฏขึ้น
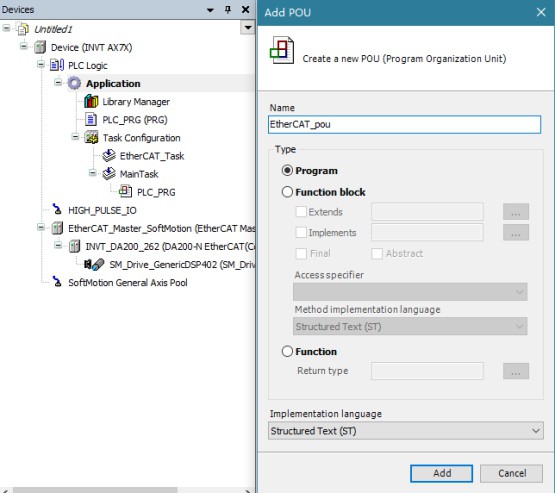
ขั้นตอนที่ 5 คลิกขวาที่แอปพลิเคชันบนแผนผังการนำทางด้านซ้าย และเลือกเพิ่ม EtherCAT POU คลิกสองครั้งที่ EtherCAT_Task ที่สร้างขึ้นโดยอัตโนมัติเพื่อเรียกใช้ เลือก EtherCAT_pou ที่สร้างขึ้น เขียนโปรแกรมแอปพลิเคชันตามกระบวนการควบคุมแอปพลิเคชัน
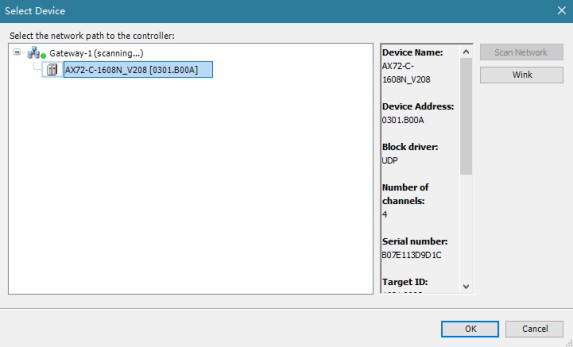
ขั้นตอนที่ 6 ดับเบิลคลิก Device navigation tree คลิก Scan Network เลือก AX72-C-1608N ตามที่แสดงในภาพต่อไปนี้ แล้วคลิก Wink จากนั้นคลิก OK เมื่อ
ไฟแสดงสถานะระบบ CPU จะกะพริบ
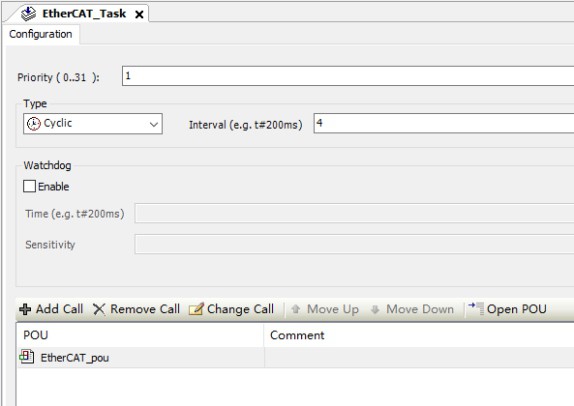
ขั้นตอนที่ 7 คลิกสองครั้งที่ EtherCAT_Task ภายใต้ Task Configuration ในบานหน้าต่างด้านซ้าย กำหนดลำดับความสำคัญของงานและช่วงเวลาการดำเนินการตามความต้องการแบบเรียลไทม์ของงาน
ใน Invtmatic Studio คุณสามารถคลิก ![]() ในการคอมไพล์โปรแกรม และคุณสามารถตรวจสอบข้อผิดพลาดตามบันทึกได้ หลังจากยืนยันว่าการคอมไพล์ถูกต้องสมบูรณ์แล้ว คุณสามารถคลิก
ในการคอมไพล์โปรแกรม และคุณสามารถตรวจสอบข้อผิดพลาดตามบันทึกได้ หลังจากยืนยันว่าการคอมไพล์ถูกต้องสมบูรณ์แล้ว คุณสามารถคลิก ![]() ในการเข้าสู่ระบบและดาวน์โหลดโปรแกรมของผู้ใช้ไปยังตัวควบคุมโปรแกรมและคุณสามารถดำเนินการแก้ไขข้อบกพร่องแบบจำลองได้
ในการเข้าสู่ระบบและดาวน์โหลดโปรแกรมของผู้ใช้ไปยังตัวควบคุมโปรแกรมและคุณสามารถดำเนินการแก้ไขข้อบกพร่องแบบจำลองได้
การตรวจสอบก่อนสตาร์ทและการบำรุงรักษาเชิงป้องกัน
ตรวจสอบก่อนเริ่มต้น
หากคุณเดินสายเสร็จแล้ว ให้ตรวจสอบสิ่งต่อไปนี้ก่อนเริ่มการทำงานของโมดูล:
- สายเคเบิลเอาต์พุตของโมดูลตรงตามข้อกำหนด
- อินเทอร์เฟซส่วนขยายในทุกระดับเชื่อมต่อได้อย่างน่าเชื่อถือ
- โปรแกรมแอปพลิเคชันใช้วิธีการทำงานและการตั้งค่าพารามิเตอร์ที่ถูกต้อง
การบำรุงรักษาเชิงป้องกัน
ดำเนินการบำรุงรักษาเชิงป้องกันดังนี้:
- ทำความสะอาดตัวควบคุมที่ตั้งโปรแกรมได้อย่างสม่ำเสมอ ป้องกันสิ่งแปลกปลอมตกลงไปในตัวควบคุม และตรวจสอบให้แน่ใจว่ามีสภาวะการระบายอากาศและการกระจายความร้อนที่ดีสำหรับตัวควบคุม
- กำหนดคำแนะนำในการบำรุงรักษาและทดสอบคอนโทรลเลอร์อย่างสม่ำเสมอ
- ตรวจสอบสายไฟและขั้วต่อเป็นประจำเพื่อให้แน่ใจว่ายึดแน่นดีแล้ว
ข้อมูลเพิ่มเติม
โปรดอย่าลังเลที่จะติดต่อเราสำหรับข้อมูลเพิ่มเติม โปรดระบุรุ่นผลิตภัณฑ์และหมายเลขซีเรียลเมื่อทำการสอบถาม
หากต้องการรับข้อมูลผลิตภัณฑ์หรือบริการที่เกี่ยวข้อง คุณสามารถ:
- ติดต่อสำนักงานท้องถิ่นของ INVT
- เยี่ยม www.invt.com.
- สแกนรหัส QR ต่อไปนี้

ศูนย์บริการลูกค้า เซินเจิ้น INVT Electric Co., Ltd.
ที่อยู่: INVT Guangming Technology Building, Songbai Road, Matian, Guangming District, Shenzhen, China
ลิขสิทธิ์ © INVT. สงวนลิขสิทธิ์. ข้อมูลคู่มืออาจเปลี่ยนแปลงได้โดยไม่ต้องแจ้งให้ทราบล่วงหน้า

202207 (V1.0)
เอกสาร / แหล่งข้อมูล
 |
โมดูลซีพียูซีรีส์ AX7 [พีดีเอฟ] คู่มือการใช้งาน โมดูลซีพียูซีรีส์ AX7, ซีรีส์ AX7, โมดูลซีพียู, โมดูล |



