![]()
AX7 ![]() Series CPU Module ຄູ່ມືຜູ້ໃຊ້
Series CPU Module ຄູ່ມືຜູ້ໃຊ້
ໂມດູນ CPU AX7 Series
ຂໍຂອບໃຈທ່ານສໍາລັບການເລືອກ AX series programmable controller (ຕົວຄວບຄຸມ programmable ສໍາລັບສັ້ນ).
ອີງໃສ່ແພລະຕະຟອມ Invtmatic Studio, ຕົວຄວບຄຸມທີ່ສາມາດວາງແຜນໄດ້ຢ່າງເຕັມສ່ວນສະຫນັບສະຫນູນລະບົບການຂຽນໂປລແກລມ IEC61131-3, EtherCAT real-time fieldbus, CANopen fieldbus, ແລະພອດຄວາມໄວສູງ, ແລະສະຫນອງ cam ເອເລັກໂຕຣນິກ, ເຄື່ອງມືເອເລັກໂຕຣນິກ, ແລະຟັງຊັນ interpolation.
ຄູ່ມືສ່ວນໃຫຍ່ແມ່ນອະທິບາຍສະເພາະ, ຄຸນນະສົມບັດ, ສາຍໄຟ, ແລະວິທີການນໍາໃຊ້ຂອງໂມດູນ CPU ຂອງຕົວຄວບຄຸມໂຄງການ. ເພື່ອໃຫ້ແນ່ໃຈວ່າທ່ານໃຊ້ຜະລິດຕະພັນຢ່າງປອດໄພແລະຖືກຕ້ອງແລະນໍາມັນເຂົ້າໄປໃນການຫຼິ້ນຢ່າງເຕັມທີ່, ອ່ານຄູ່ມືຢ່າງລະອຽດກ່ອນທີ່ຈະຕິດຕັ້ງ. ສໍາລັບລາຍລະອຽດກ່ຽວກັບສະພາບແວດລ້ອມການພັດທະນາໂປຣແກຣມຜູ້ໃຊ້ ແລະວິທີການອອກແບບໂປຣແກຣມຜູ້ໃຊ້, ເບິ່ງ AX Series Programmable Controller Hardware User Manual ແລະ AX Series Programmable Controller Software Manual ທີ່ພວກເຮົາອອກ.
ຄູ່ມືແມ່ນມີການປ່ຽນແປງໂດຍບໍ່ມີການແຈ້ງລ່ວງຫນ້າ. ກະລຸນາໄປຢ້ຽມຢາມ http://www.invt.com ເພື່ອດາວໂຫລດເວີຊັນຄູ່ມືຫຼ້າສຸດ.
ລະມັດລະວັງຄວາມປອດໄພ
ຄຳເຕືອນ
| ສັນຍາລັກ | ຊື່ | ລາຍລະອຽດ | ຕົວຫຍໍ້ |
| ອັນຕະລາຍ | ອັນຕະລາຍ | ການບາດເຈັບສ່ວນບຸກຄົນຮ້າຍແຮງຫຼືແມ້ກະທັ້ງການເສຍຊີວິດສາມາດສົ່ງຜົນໃຫ້ຖ້າຫາກວ່າຂໍ້ກໍານົດທີ່ກ່ຽວຂ້ອງບໍ່ໄດ້ຖືກປະຕິບັດຕາມ. | |
| ຄຳເຕືອນ | ຄຳເຕືອນ | ການບາດເຈັບສ່ວນບຸກຄົນຫຼືຄວາມເສຍຫາຍອຸປະກອນສາມາດສົ່ງຜົນໃຫ້ຖ້າຫາກວ່າຂໍ້ກໍານົດທີ່ກ່ຽວຂ້ອງບໍ່ໄດ້ປະຕິບັດຕາມ. |
ການຈັດສົ່ງແລະການຕິດຕັ້ງ
| •ພຽງແຕ່ຜູ້ຊ່ຽວຊານດ້ານການຝຶກອົບຮົມແລະມີຄຸນວຸດທິໄດ້ຮັບອະນຸຍາດໃຫ້ປະຕິບັດການຕິດຕັ້ງ, ສາຍໄຟ, ບໍາລຸງຮັກສາ, ແລະການກວດກາ. • ຫ້າມຕິດຕັ້ງຕົວຄວບຄຸມໂປຣແກມທີ່ຕິດໄຟໄດ້. ນອກຈາກນັ້ນ, ປ້ອງກັນບໍ່ໃຫ້ຕົວຄວບຄຸມໂຄງການຕິດຕໍ່ຫຼືຕິດກັບການອັກເສບ. • ຕິດຕັ້ງຕົວຄວບຄຸມໂປຣແກຣມຢູ່ໃນຕູ້ຄວບຄຸມທີ່ສາມາດລັອກໄດ້ຢ່າງໜ້ອຍ IP20, ເຊິ່ງປ້ອງກັນບໍ່ໃຫ້ບຸກຄະລາກອນທີ່ບໍ່ມີຄວາມຮູ້ກ່ຽວກັບອຸປະກອນໄຟຟ້າຈາກການສໍາຜັດໂດຍຄວາມຜິດພາດ, ເນື່ອງຈາກຄວາມຜິດພາດອາດຈະເຮັດໃຫ້ອຸປະກອນເສຍຫາຍ ຫຼືໄຟຟ້າຊອດ. ພຽງແຕ່ບຸກຄະລາກອນທີ່ໄດ້ຮັບຄວາມຮູ້ກ່ຽວກັບໄຟຟ້າທີ່ກ່ຽວຂ້ອງແລະການຝຶກອົບຮົມການດໍາເນີນງານອຸປະກອນສາມາດປະຕິບັດງານຕູ້ຄວບຄຸມໄດ້. • ຫ້າມເປີດໃຊ້ຕົວຄວບຄຸມໂປຣແກຣມ ຖ້າມັນເສຍຫາຍ ຫຼື ບໍ່ສົມບູນ. • ຫ້າມຕິດຕໍ່ກັບຕົວຄວບຄຸມໂປຣແກຣມທີ່ມີ damp ວັດຖຸ ຫຼືພາກສ່ວນຂອງຮ່າງກາຍ. ຖ້າບໍ່ດັ່ງນັ້ນ, ໄຟຟ້າຊ໊ອກອາດຈະສົ່ງຜົນ. |
ການເລືອກສາຍ
| •ພຽງແຕ່ຜູ້ຊ່ຽວຊານດ້ານການຝຶກອົບຮົມແລະມີຄຸນວຸດທິໄດ້ຮັບອະນຸຍາດໃຫ້ປະຕິບັດການຕິດຕັ້ງ, ສາຍໄຟ, ບໍາລຸງຮັກສາ, ແລະການກວດກາ. •ເຂົ້າໃຈຢ່າງສົມບູນກ່ຽວກັບປະເພດການໂຕ້ຕອບ, ຂໍ້ມູນສະເພາະ, ແລະຄວາມຕ້ອງການທີ່ກ່ຽວຂ້ອງກ່ອນທີ່ຈະສາຍ. ຖ້າບໍ່ດັ່ງນັ້ນ, ສາຍໄຟທີ່ບໍ່ຖືກຕ້ອງຈະເຮັດໃຫ້ເກີດ ແລ່ນຜິດປົກກະຕິ. • ຕັດການສະຫນອງພະລັງງານທັງຫມົດທີ່ເຊື່ອມຕໍ່ກັບຕົວຄວບຄຸມທີ່ຕັ້ງໂປຣແກຣມໄດ້ກ່ອນທີ່ຈະດໍາເນີນການສາຍ. • ກ່ອນທີ່ຈະເປີດເຄື່ອງເພື່ອແລ່ນ, ໃຫ້ແນ່ໃຈວ່າຝາປິດແຕ່ລະໂມດູນຂອງແຕ່ລະໂມດູນຖືກຕິດຕັ້ງຢ່າງຖືກຕ້ອງຢູ່ບ່ອນ ຫຼັງຈາກການຕິດຕັ້ງ ແລະສາຍໄຟສຳເລັດແລ້ວ. ອັນນີ້ປ້ອງກັນບໍ່ໃຫ້ສະຖານີສົດຖືກແຕະຕ້ອງ. ຖ້າບໍ່ດັ່ງນັ້ນ, ການບາດເຈັບທາງຮ່າງກາຍ, ຄວາມຜິດຂອງອຸປະກອນຫຼືການຜິດປົກກະຕິອາດຈະສົ່ງຜົນ. • ຕິດຕັ້ງອົງປະກອບ ຫຼືອຸປະກອນປ້ອງກັນທີ່ເໝາະສົມເມື່ອໃຊ້ອຸປະກອນໄຟຟ້າພາຍນອກສຳລັບຕົວຄວບຄຸມທີ່ສາມາດຂຽນໂປຣແກຣມໄດ້. ນີ້ປ້ອງກັນບໍ່ໃຫ້ຕົວຄວບຄຸມໂຄງການຖືກທໍາລາຍເນື່ອງຈາກຄວາມຜິດຂອງການສະຫນອງພະລັງງານພາຍນອກ, overvoltage, overcurrent, ຫຼືຂໍ້ຍົກເວັ້ນອື່ນໆ. |
ການມອບໝາຍ ແລະແລ່ນ
| • ກ່ອນທີ່ຈະເປີດໄຟເພື່ອແລ່ນ, ໃຫ້ແນ່ໃຈວ່າສະພາບແວດລ້ອມການເຮັດວຽກຂອງຕົວຄວບຄຸມໂປຣແກຣມໄດ້ຕາມຄວາມຕ້ອງການ, ສາຍໄຟແມ່ນຖືກຕ້ອງ, ຂໍ້ມູນຈໍາເພາະຂອງພະລັງງານ input ຕອບສະຫນອງຄວາມຕ້ອງການ, ແລະວົງຈອນປ້ອງກັນໄດ້ຖືກອອກແບບເພື່ອປົກປ້ອງຕົວຄວບຄຸມທີ່ສາມາດຂຽນໂປຣແກຣມໄດ້. ການຄວບຄຸມສາມາດດໍາເນີນການໄດ້ຢ່າງປອດໄພເຖິງແມ່ນວ່າຄວາມຜິດຂອງອຸປະກອນພາຍນອກເກີດຂຶ້ນ. • ສໍາລັບໂມດູນ ຫຼື terminals ທີ່ຕ້ອງການການສະຫນອງພະລັງງານຈາກພາຍນອກ, ກໍານົດອຸປະກອນຄວາມປອດໄພພາຍນອກເຊັ່ນ: fuses ຫຼື breakers ວົງຈອນເພື່ອປ້ອງກັນຄວາມເສຍຫາຍທີ່ເກີດຈາກການສະຫນອງພະລັງງານພາຍນອກຫຼືຄວາມຜິດຂອງອຸປະກອນ. |
ການບໍາລຸງຮັກສາແລະການທົດແທນອົງປະກອບ
| •ພຽງແຕ່ຜູ້ຊ່ຽວຊານດ້ານການຝຶກອົບຮົມແລະມີຄຸນວຸດທິໄດ້ຮັບອະນຸຍາດໃຫ້ປະຕິບັດການບໍາລຸງຮັກສາ, ກວດກາ, ແລະທົດແທນອົງປະກອບສໍາລັບການ ຕົວຄວບຄຸມໂຄງການ. • ຕັດອຸປະກອນໄຟທັງໝົດທີ່ເຊື່ອມຕໍ່ກັບຕົວຄວບຄຸມທີ່ສາມາດຕັ້ງໂປຣແກຣມໄດ້ກ່ອນສາຍໄຟຢູ່ປາຍຍອດ. • ໃນລະຫວ່າງການບຳລຸງຮັກສາ ແລະ ການປ່ຽນອົງປະກອບ, ໃຫ້ໃຊ້ມາດຕະການເພື່ອປ້ອງກັນບໍ່ໃຫ້ສະກູ, ສາຍເຄເບີ້ນ ແລະ ສິ່ງນຳສົ່ງອື່ນໆ ຕົກຢູ່ໃນສ່ວນຂອງຕົວຄວບຄຸມທີ່ຕັ້ງໂປຣແກຣມໄດ້. |
ການຖິ້ມຂີ້ເຫຍື້ອ
| ຕົວຄວບຄຸມໂຄງການປະກອບດ້ວຍໂລຫະຫນັກ. ຖິ້ມເຄື່ອງຄວບຄຸມໂຄງການທີ່ຂູດເປັນສິ່ງເສດເຫຼືອອຸດສາຫະກໍາ. | |
| ຖິ້ມຂີ້ເຫຍື້ອອອກຈາກບ່ອນເກັບມ້ຽນທີ່ເໝາະສົມ ແຕ່ຢ່າວາງໄວ້ໃນກະແສຂີ້ເຫຍື້ອປົກກະຕິ. |
ການແນະນໍາຜະລິດຕະພັນ
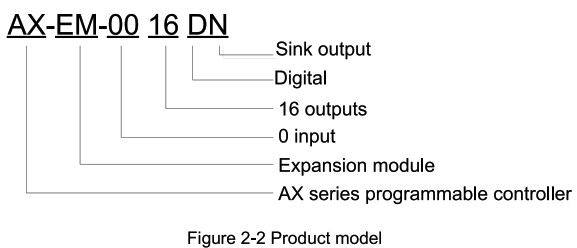
ຕົວແບບແລະປ້າຍຊື່
ຟັງຊັນແລ້ວview
ໃນຖານະເປັນໂມດູນຄວບຄຸມຕົ້ນຕໍຂອງຕົວຄວບຄຸມທີ່ສາມາດຂຽນໄດ້, AX7J-C-1608L] CPU module (CPU module ສໍາລັບສັ້ນ) ມີຫນ້າທີ່ດັ່ງຕໍ່ໄປນີ້:
- Realizes ການຄວບຄຸມ, ການຕິດຕາມ, ການປຸງແຕ່ງຂໍ້ມູນ, ແລະການສື່ສານເຄືອຂ່າຍສໍາລັບການແລ່ນລະບົບ.
- ຮອງຮັບພາສາການຂຽນໂປຼແກຼມ IL, ST, FBD, LD, CFC ແລະ SFC ທີ່ສອດຄ່ອງກັບມາດຕະຖານ IEC61131-3 ໂດຍໃຊ້ແພລະຕະຟອມສະຕູດິໂອ Invtmatic ທີ່ INVT ໄດ້ເປີດຕົວສໍາລັບການຂຽນໂປຼແກຼມ.
- ຮອງຮັບ 16 ໂມດູນການຂະຫຍາຍທ້ອງຖິ່ນ (ເຊັ່ນ: I/O, ອຸນຫະພູມ, ແລະໂມດູນການປຽບທຽບ).
- ໃຊ້ Ether CAT ຫຼື CAN ເປີດລົດເມເພື່ອເຊື່ອມຕໍ່ໂມດູນສໍາລອງ, ແຕ່ລະຄົນສະຫນັບສະຫນູນ 16 ໂມດູນການຂະຫຍາຍ (ເຊັ່ນ: I/O, ອຸນຫະພູມ, ແລະໂມດູນອະນາລັອກ).
- ຮອງຮັບ Modbus TCP master/slave protocol.
- ຮວມສອງອິນເຕີເຟດ RS485, ຮອງຮັບ Modbus RTU master/slave protocol.
- ຮອງຮັບ I/O ຄວາມໄວສູງ, 16 ວັດສະດຸປ້ອນຄວາມໄວສູງ ແລະ 8 ຜົນຜະລິດຄວາມໄວສູງ.
- ຮອງຮັບການຄວບຄຸມການເຄື່ອນໄຫວຂອງ EtherCAT fieldbus ທີ່ມີເວລາ synchronization ຂອງ 1ms, 2ms, 4ms, ຫຼື 8ms.
- ຮອງຮັບການຄວບຄຸມການເຄື່ອນໄຫວຕາມແກນດຽວ ຫຼືຫຼາຍແກນ, ລວມທັງ 2-4 axis linear interpolation ແລະ 2-axis arc interpolation.
- ຮອງຮັບໂມງເວລາຈິງ.
- ຮອງຮັບການປົກປ້ອງຂໍ້ມູນການຂັດຂ້ອງຂອງພະລັງງານ.
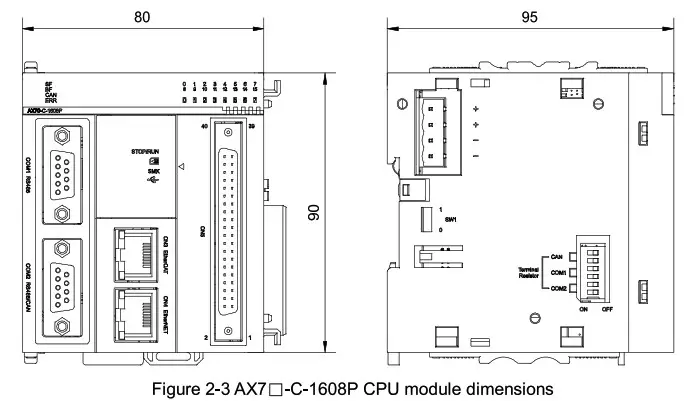
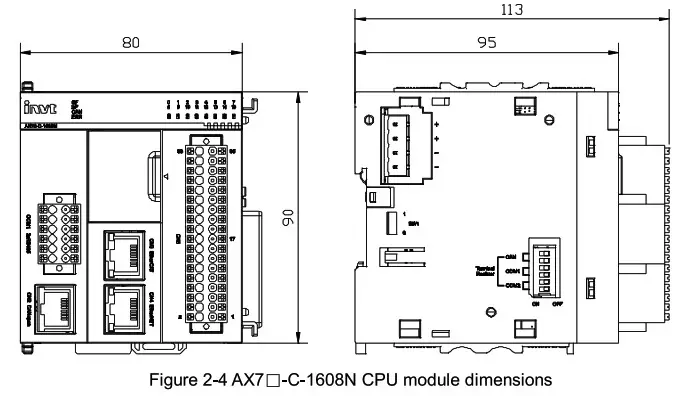
ຂະຫນາດໂຄງສ້າງ
ຂະຫນາດໂຄງສ້າງ (ຫນ່ວຍງານ: mm) ແມ່ນສະແດງຢູ່ໃນຮູບດັ່ງຕໍ່ໄປນີ້.
ການໂຕ້ຕອບ
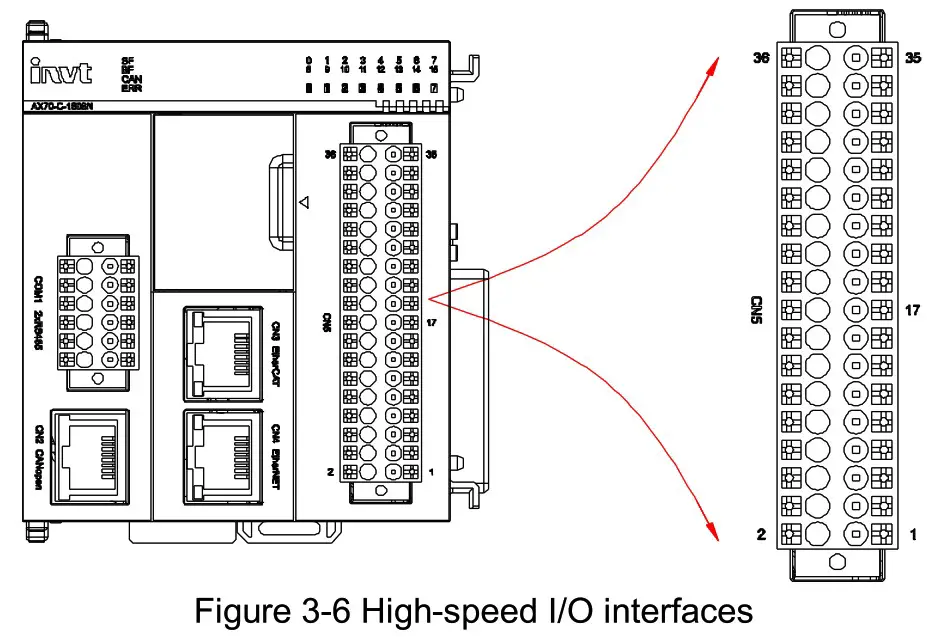
ລາຍລະອຽດໃນການໂຕ້ຕອບ
ການແຜ່ກະຈາຍໃນການໂຕ້ຕອບ
ຮູບ 3-1 ແລະຮູບ 3-2 ສະແດງໃຫ້ເຫັນການແຜ່ກະຈາຍຂອງການໂຕ້ຕອບຂອງໂມດູນ CPU. ສໍາລັບແຕ່ລະອິນເຕີເຟດ, ຄໍາອະທິບາຍຫນ້າຈໍຜ້າໄຫມຕາມລໍາດັບແມ່ນສະຫນອງໃຫ້ຢູ່ໃກ້ໆ, ເຊິ່ງອໍານວຍຄວາມສະດວກໃນສາຍ, ການດໍາເນີນງານ, ແລະການກວດສອບ.
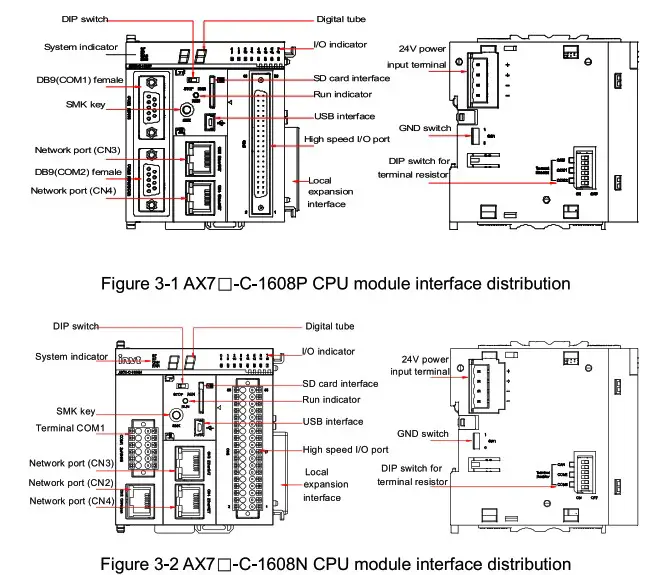
| ການໂຕ້ຕອບ | ຟັງຊັນ | |
| ປ່ຽນ DIP | ເປີດ/ຢຸດ DIP switch. | |
| ຕົວຊີ້ວັດລະບົບ | SF: ຕົວຊີ້ວັດຄວາມຜິດຂອງລະບົບ. BF: ຕົວຊີ້ວັດຄວາມຜິດຂອງລົດເມ. CAN: CAN ຕົວຊີ້ວັດຄວາມຜິດຂອງລົດເມ. ERR: ຕົວຊີ້ບອກຄວາມຜິດຂອງໂມດູນ. | |
| ກະແຈ SMK | ກະແຈອັດສະລິຍະ SMK. | |
| WO-C-1608P | COM1 (DB9) ເພດຍິງ | ຫນຶ່ງໃນການໂຕ້ຕອບ RS485, ສະຫນັບສະຫນູນ Modbus RTU ອະນຸສັນຍາຕົ້ນສະບັບ/ທາດ. |
| COM2 (DB9) ເພດຍິງ | ຫນຶ່ງໃນການໂຕ້ຕອບ RS485, ແລະການໂຕ້ຕອບ CAN ອື່ນໆ ການໂຕ້ຕອບ RS485 ສະຫນັບສະຫນູນ Modbus RTU master/slave protocol ແລະສ່ວນຕິດຕໍ່ CAN ອື່ນໆສະຫນັບສະຫນູນ CANopen master/slave protocol. | |
| AX70-C-1608N | COM1&COM2 (Push-in n terminal) | ສອງ RS485 ການໂຕ້ຕອບ, ສະຫນັບສະຫນູນ Modbus RTU ອະນຸສັນຍາຕົ້ນສະບັບ/ທາດ. |
| CN2 (RJ45) | ການໂຕ້ຕອບ CAN, ສະຫນັບສະຫນູນ CAN ເປີດ master / slave protocol. | |
| CN3 (RJ45) | ການໂຕ້ຕອບ Ether CAT | |
| CN4 (RJ45) | 1.Modbus TCP protocol 2.ຟັງຊັນອີເທີເນັດມາດຕະຖານ 3. ດາວໂຫຼດໂປຣແກຣມຜູ້ໃຊ້ ແລະດີບັກ (ສະເພາະກັບ IPv4) | |
| ທໍ່ດິຈິຕອນ | ສະແດງໂມງປຸກ ແລະຕອບກັບການກົດປຸ່ມ SMK. | |
| ຕົວຊີ້ບອກ I/O | ຊີ້ບອກວ່າສັນຍານຂອງ 16 inputs ແລະ 8 outputs ຖືກຕ້ອງຫຼືບໍ່. | |
| ການໂຕ້ຕອບບັດ SD | ໃຊ້ເພື່ອເກັບຮັກສາໂຄງການຜູ້ໃຊ້ແລະຂໍ້ມູນ. | |
| ແລ່ນຕົວຊີ້ວັດ | ຊີ້ບອກວ່າໂມດູນ CPU ເຮັດວຽກຢູ່. | |
| ການໂຕ້ຕອບ USB | ໃຊ້ເພື່ອດາວໂຫລດ ແລະແກ້ໄຂໂຄງການ. | |
| I/O ຄວາມໄວສູງ | 16 ວັດສະດຸປ້ອນຄວາມໄວສູງແລະ 8 ຜົນຜະລິດຄວາມໄວສູງ. | |
| ການໂຕ້ຕອບການຂະຫຍາຍທ້ອງຖິ່ນ | ຮອງຮັບການຂະຫຍາຍໂມດູນ I/O 16 ໂມດູນ, ບໍ່ອະນຸຍາດໃຫ້ແລກປ່ຽນຮ້ອນ. | |
| ການໂຕ້ຕອບພະລັງງານ 24V | DC 24V voltage ການປ້ອນຂໍ້ມູນ | |
| ສະຫຼັບດິນ | ສະຫຼັບການເຊື່ອມຕໍ່ລະຫວ່າງລະບົບພາຍໃນລະບົບດິຈິຕອນແລະພື້ນທີ່ທີ່ຢູ່ອາໄສ. ມັນຖືກຕັດການເຊື່ອມຕໍ່ໂດຍຄ່າເລີ່ມຕົ້ນ (SW1 ຖືກຕັ້ງເປັນ 0). ມັນຖືກນໍາໃຊ້ພຽງແຕ່ໃນສະຖານະການພິເສດທີ່ພື້ນທີ່ດິຈິຕອນພາຍໃນຂອງລະບົບຖືກປະຕິບັດເປັນຍົນອ້າງອີງ. ລະມັດລະວັງກ່ອນທີ່ຈະປະຕິບັດມັນ. ຖ້າບໍ່ດັ່ງນັ້ນ, ຄວາມຫມັ້ນຄົງຂອງລະບົບໄດ້ຮັບຜົນກະທົບ. | |
| DIP switch ຂອງ resistor terminal | ON ສະແດງເຖິງການເຊື່ອມຕໍ່ຕົວຕ້ານທານຢູ່ປາຍຍອດ (ມັນຖືກປິດໂດຍຄ່າເລີ່ມຕົ້ນ). COM1 ກົງກັບ RS485-1, COM2 ກົງກັບ RS485-2, ແລະ CAN ກົງກັບ CAN. | |
ກະແຈ SMK
ປຸ່ມ SMK ສ່ວນໃຫຍ່ແມ່ນໃຊ້ເພື່ອຣີເຊັດທີ່ຢູ່ IP ຂອງໂມດູນ CPU (rP), ແລະໂຄງການແອັບພລິເຄຊັນທີ່ຊັດເຈນ (cA). ທີ່ຢູ່ໂມດູນ CPU ເລີ່ມຕົ້ນແມ່ນ 192.168.1.10. ຖ້າທ່ານຕ້ອງການຟື້ນຟູທີ່ຢູ່ເລີ່ມຕົ້ນຈາກທີ່ຢູ່ IP ທີ່ຖືກດັດແປງ, ທ່ານສາມາດຟື້ນຟູທີ່ຢູ່ເລີ່ມຕົ້ນໄດ້ໂດຍຜ່ານລະຫັດ SMK. ວິທີການດັ່ງຕໍ່ໄປນີ້:
- ຕັ້ງໂມດູນ CPU ເປັນສະຖານະ STOP. ກົດປຸ່ມ SMK. ເມື່ອທໍ່ດິຈິຕອນສະແດງ “rP”, ໃຫ້ກົດປຸ່ມ SMK ຄ້າງໄວ້. ຫຼັງຈາກນັ້ນ, ທໍ່ດິຈິຕອນຈະສະແດງ "rP" ແລະປິດສະລັບກັນ, ສະແດງໃຫ້ເຫັນວ່າການປັບທີ່ຢູ່ IP ຈະຖືກປະຕິບັດ. ການປະຕິບັດການຣີເຊັດສຳເລັດເມື່ອທໍ່ດິຈິຕອລປິດສະໝໍ່າສະເໝີ. ຖ້າທ່ານປ່ອຍກະແຈ SMK ໃນເວລານີ້, ທໍ່ດິຈິຕອນຈະສະແດງ "rP". ກົດປຸ່ມ SMK ຄ້າງໄວ້ຈົນກວ່າທໍ່ຈະສະແດງ “00” (rP—cA—rU-rP).
- ຖ້າທ່ານປ່ອຍກະແຈ SMK ໃນລະຫວ່າງຂະບວນການທີ່ທໍ່ດິຈິຕອນສະແດງ "rP" ແລະປິດສະລັບກັນ, ການດໍາເນີນງານການປັບທີ່ຢູ່ IP ຈະຖືກຍົກເລີກ, ແລະທໍ່ດິຈິຕອນຈະສະແດງ "rP".
ເພື່ອລຶບໂຄງການອອກຈາກໂມດູນ CPU, ເຮັດດັ່ງຕໍ່ໄປນີ້:
ກົດປຸ່ມ SMK. ເມື່ອທໍ່ດິຈິຕອນສະແດງ “cA”, ໃຫ້ກົດປຸ່ມ SMK ຄ້າງໄວ້. ຫຼັງຈາກນັ້ນ, ທໍ່ດິຈິຕອນຈະສະແດງ "rP" ແລະປິດສະລັບກັນ, ສະແດງໃຫ້ເຫັນວ່າໂຄງການກໍາລັງຖືກລຶບລ້າງ. ເມື່ອທໍ່ດິຈິຕອລປິດສະໝໍ່າສະເໝີ, ຣີສະຕາດໂມດູນ CPU. ໂຄງການດັ່ງກ່າວໄດ້ຖືກລົບລ້າງສົບຜົນສໍາເລັດ.
ລາຍລະອຽດທໍ່ດິຈິຕອນ
- ຖ້າໂຄງການບໍ່ມີຄວາມຜິດພາດຫຼັງຈາກການດາວໂຫຼດ, ທໍ່ດິຈິຕອນຂອງໂມດູນ CPU ຈະສະແດງ "00" ຢ່າງຕໍ່ເນື່ອງ.
- ຖ້າໂຄງການມີຄວາມຜິດ, ທໍ່ດິຈິຕອນຈະສະແດງຂໍ້ມູນຄວາມຜິດໃນການກະພິບ.
- ຕົວຢ່າງampຖ້າຫາກວ່າຄວາມຜິດພາດ 19 ພຽງແຕ່ເກີດຂຶ້ນ, ທໍ່ດິຈິຕອນຈະສະແດງ "19" ແລະປິດສະລັບກັນ. ຖ້າຄວາມຜິດ 19 ແລະ ຄວາມຜິດ 29 ເກີດຂຶ້ນພ້ອມໆກັນ, ທໍ່ດິຈິຕອນຈະສະແດງ “19”, ປິດ, ສະແດງ “29”, ແລະປິດສະຫຼັບກັນ. ຖ້າຄວາມຜິດຫຼາຍເກີດຂື້ນພ້ອມໆກັນ, ວິທີການສະແດງແມ່ນຄ້າຍຄືກັນ.
ຄໍານິຍາມ Terminal
AX7![]() -C-1608P COM1/COM2 ຄໍານິຍາມຂອງສະຖານີການສື່ສານ
-C-1608P COM1/COM2 ຄໍານິຍາມຂອງສະຖານີການສື່ສານ
ສໍາລັບໂມດູນ CPU AX7LJ-C-1608P, COM1 ແມ່ນສະຖານີການສື່ສານ RS485 ແລະ COM2 ແມ່ນສະຖານີການສື່ສານ RS485/CAN, ທັງສອງໃຊ້ຕົວເຊື່ອມຕໍ່ DB9 ສໍາລັບການສົ່ງຂໍ້ມູນ. ການໂຕ້ຕອບແລະ pins ໄດ້ຖືກອະທິບາຍໃນດັ່ງຕໍ່ໄປນີ້.
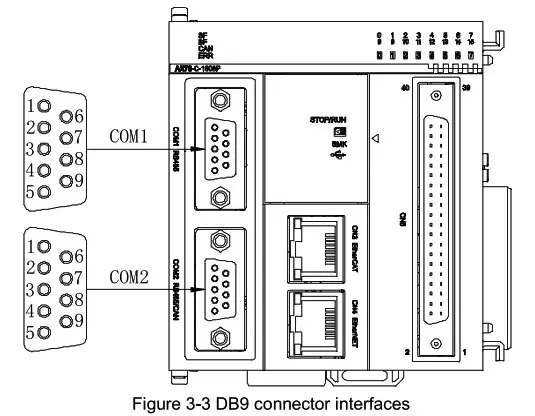
ຕາຕະລາງ 3-1 ເຂັມເຊື່ອມຕໍ່ COM1/COM2 DB39
| ການໂຕ້ຕອບ | ການແຜ່ກະຈາຍ | ປັກໝຸດ | ຄໍານິຍາມ | ຟັງຊັນ |
| COM1 (RS485) | 1 | / | / | |
| 2 | / | / | ||
| 3 | / | / | ||
| 4 | RS485A | RS485 ສັນຍານຄວາມແຕກຕ່າງ + | ||
| 5 | RS485B | RS485 ສັນຍານທີ່ແຕກຕ່າງກັນ – | ||
| 6 | / | / | ||
| 7 | / | / | ||
| 8 | / | / | ||
| 9 | GND_RS485 | ດິນໄຟຟ້າ RS485 | ||
| COM2 (RS485/CAN) | 1 | / | / | |
| 2 | CAN _L | ສາມາດສັນຍານທີ່ແຕກຕ່າງກັນ - | ||
| 3 | / | / | ||
| 4 | RS485A | RS485 ສັນຍານຄວາມແຕກຕ່າງ + | ||
| 5 | RS485B | RS485 ສັນຍານທີ່ແຕກຕ່າງກັນ – | ||
| 6 | GND_CAN | ສາມາດທີ່ດິນພະລັງງານ | ||
| 7 | ສາມາດ _H | CAN ສັນຍານຄວາມແຕກຕ່າງ + | ||
| 8 | / | / | ||
| 9 | GND_RS485 | ດິນໄຟຟ້າ RS485 |
AX7![]() -C-1608P ຄວາມໄວສູງ I/O terminal ຄໍານິຍາມ
-C-1608P ຄວາມໄວສູງ I/O terminal ຄໍານິຍາມ
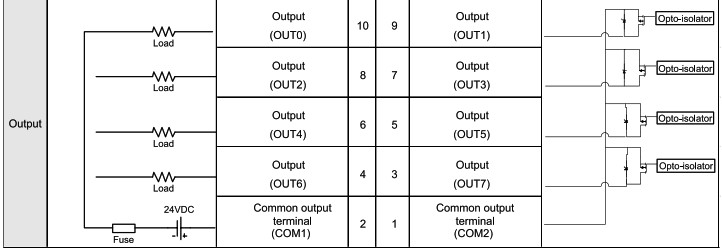
AX7![]() -C-1608P ໂມດູນ CPU ມີ 16 ວັດສະດຸປ້ອນຄວາມໄວສູງແລະ 8 ຜົນຜະລິດຄວາມໄວສູງ. ການໂຕ້ຕອບແລະ pins ໄດ້ຖືກອະທິບາຍໃນດັ່ງຕໍ່ໄປນີ້.
-C-1608P ໂມດູນ CPU ມີ 16 ວັດສະດຸປ້ອນຄວາມໄວສູງແລະ 8 ຜົນຜະລິດຄວາມໄວສູງ. ການໂຕ້ຕອບແລະ pins ໄດ້ຖືກອະທິບາຍໃນດັ່ງຕໍ່ໄປນີ້.
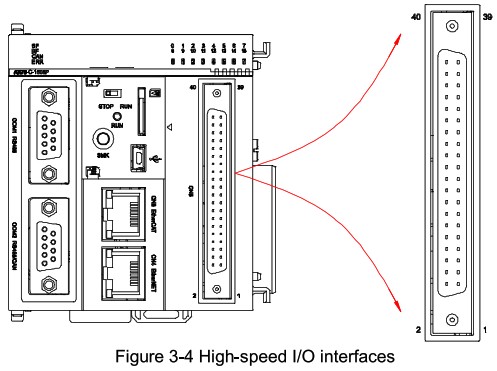
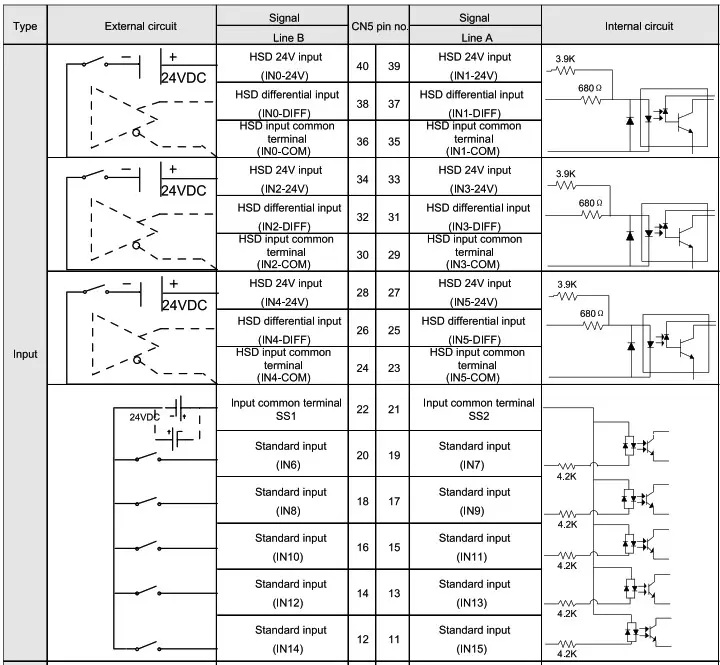
ຕາຕະລາງ 3-2 pin I/O ຄວາມໄວສູງ
AX7![]() -C-1608N COM1/CN2 ຄໍານິຍາມຂອງສະຖານີການສື່ສານ
-C-1608N COM1/CN2 ຄໍານິຍາມຂອງສະຖານີການສື່ສານ
ສໍາລັບ AX7![]() -C-1608N ໂມດູນ CPU, COM1 ເປັນສອງຊ່ອງສັນຍານ RS485 terminal ການສື່ສານ, ການນໍາໃຊ້ 12-pin Push-in connector ສໍາລັບການສົ່ງຂໍ້ມູນ. CN2 ແມ່ນສະຖານີການສື່ສານ CAN, ໃຊ້ຕົວເຊື່ອມຕໍ່ RJ45 ສໍາລັບການສົ່ງຂໍ້ມູນ. ການໂຕ້ຕອບແລະ pins ໄດ້ຖືກອະທິບາຍໃນດັ່ງຕໍ່ໄປນີ້.
-C-1608N ໂມດູນ CPU, COM1 ເປັນສອງຊ່ອງສັນຍານ RS485 terminal ການສື່ສານ, ການນໍາໃຊ້ 12-pin Push-in connector ສໍາລັບການສົ່ງຂໍ້ມູນ. CN2 ແມ່ນສະຖານີການສື່ສານ CAN, ໃຊ້ຕົວເຊື່ອມຕໍ່ RJ45 ສໍາລັບການສົ່ງຂໍ້ມູນ. ການໂຕ້ຕອບແລະ pins ໄດ້ຖືກອະທິບາຍໃນດັ່ງຕໍ່ໄປນີ້.

ຕາຕະລາງ 3-3 ເຂັມເຊື່ອມຕໍ່ COM1/CN2
| ຫນ້າທີ່ Push-in terminal ຂອງ COM1 | ||||
| ຄໍານິຍາມ | ຟັງຊັນ | ປັກໝຸດ | ||
| COM1 RS485 | A | ສັນຍານຄວາມແຕກຕ່າງ RS485 + | 12 | |
| B | RS485 ສັນຍານທີ່ແຕກຕ່າງກັນ – | 10 | ||
| GND | ພະລັງງານຊິບ RS485 _1 ດິນ | 8 | ||
| PE | ພື້ນທີ່ໄສ້ | 6 | ||
| COM2 RS485 | A | ສັນຍານຄວາມແຕກຕ່າງ RS485 + | 11 | |
| B | RS485 ສັນຍານທີ່ແຕກຕ່າງກັນ – | 9 | ||
| GND | ພະລັງງານຊິບ RS485_2 ດິນ | 7 | ||
| PE | ພື້ນທີ່ໄສ້ | 5 | ||
| ຫມາຍເຫດ: Pins 1-4 ບໍ່ໄດ້ຖືກນໍາໃຊ້. | ||||
| ປັກໝຸດຟັງຊັນຂອງ CN2 | ||||
| ຄໍານິຍາມ | ຟັງຊັນ | ປັກໝຸດ | ||
| ຄາໂນເປນ | GND | ສາມາດທີ່ດິນພະລັງງານ | 1 | |
| CAN_L | ສາມາດສັນຍານທີ່ແຕກຕ່າງກັນ - | 7 | ||
| CAN_H | CAN ສັນຍານຄວາມແຕກຕ່າງ + | 8 | ||
| ຫມາຍເຫດ: Pins 2-6 ບໍ່ໄດ້ຖືກນໍາໃຊ້. | ||||
AX7![]() -C-1608N ຄວາມໄວສູງ I/O terminal ຄໍານິຍາມ
-C-1608N ຄວາມໄວສູງ I/O terminal ຄໍານິຍາມ
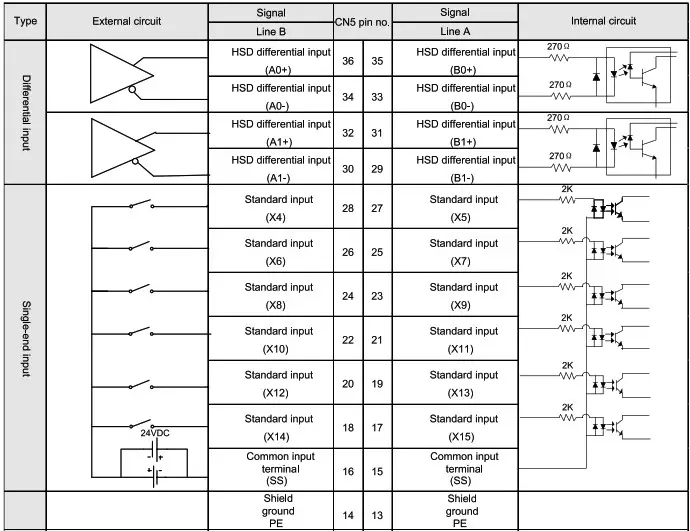
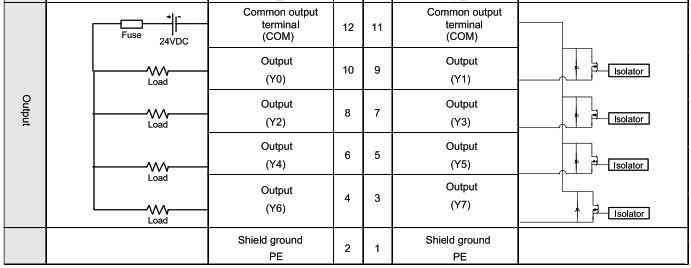
AX7![]() ໂມດູນ CPU 1-C-1608N ມີ 16 ວັດສະດຸປ້ອນຄວາມໄວສູງແລະ 8 ຜົນຜະລິດຄວາມໄວສູງ. ຕົວເລກຕໍ່ໄປນີ້ສະແດງໃຫ້ເຫັນການແຜ່ກະຈາຍຢູ່ປາຍຍອດແລະຕາຕະລາງຕໍ່ໄປນີ້ສະແດງລາຍການ pins.
ໂມດູນ CPU 1-C-1608N ມີ 16 ວັດສະດຸປ້ອນຄວາມໄວສູງແລະ 8 ຜົນຜະລິດຄວາມໄວສູງ. ຕົວເລກຕໍ່ໄປນີ້ສະແດງໃຫ້ເຫັນການແຜ່ກະຈາຍຢູ່ປາຍຍອດແລະຕາຕະລາງຕໍ່ໄປນີ້ສະແດງລາຍການ pins.
ຕາຕະລາງ 3-4 pin I/O ຄວາມໄວສູງ
ໝາຍເຫດ:
- ທັງໝົດ 16 ຊ່ອງປ້ອນຂໍ້ມູນຂອງ AX7
 ໂມດູນ CPU -C-1608P ອະນຸຍາດໃຫ້ປ້ອນຂໍ້ມູນດ້ວຍຄວາມໄວສູງ, ແຕ່ 6 ຊ່ອງທໍາອິດສະຫນັບສະຫນູນ 24V single-end ຫຼືການປ້ອນຂໍ້ມູນທີ່ແຕກຕ່າງກັນ, ແລະ 10 ຊ່ອງສຸດທ້າຍສະຫນັບສະຫນູນ 24V single-end input.
ໂມດູນ CPU -C-1608P ອະນຸຍາດໃຫ້ປ້ອນຂໍ້ມູນດ້ວຍຄວາມໄວສູງ, ແຕ່ 6 ຊ່ອງທໍາອິດສະຫນັບສະຫນູນ 24V single-end ຫຼືການປ້ອນຂໍ້ມູນທີ່ແຕກຕ່າງກັນ, ແລະ 10 ຊ່ອງສຸດທ້າຍສະຫນັບສະຫນູນ 24V single-end input. - ທັງໝົດ 16 ຊ່ອງປ້ອນຂໍ້ມູນຂອງ AX7ໂມດູນ CPU -C-1608N ອະນຸຍາດໃຫ້ປ້ອນຂໍ້ມູນຄວາມໄວສູງ, ແຕ່ 4 ຊ່ອງທໍາອິດສະຫນັບສະຫນູນການປ້ອນຂໍ້ມູນທີ່ແຕກຕ່າງກັນ, ແລະ 12 ຊ່ອງສຸດທ້າຍສະຫນັບສະຫນູນ 24V ຂາເຂົ້າດຽວ.
- ແຕ່ລະຈຸດ I/O ແມ່ນແຍກອອກຈາກວົງຈອນພາຍໃນ.
- ຄວາມຍາວທັງໝົດຂອງສາຍເຊື່ອມຕໍ່ພອດ I/O ຄວາມໄວສູງບໍ່ສາມາດເກີນ 3 ແມັດໄດ້.
- ຢ່າງໍສາຍເຄເບີ້ນໃນເວລາຍຶດສາຍ.
- ໃນລະຫວ່າງການກໍານົດເສັ້ນທາງສາຍ, ໃຫ້ແຍກສາຍເຊື່ອມຕໍ່ຈາກສາຍໄຟຟ້າສູງທີ່ເຮັດໃຫ້ເກີດການຂັດຂວາງທີ່ເຂັ້ມແຂງແຕ່ບໍ່ໄດ້ຜູກມັດສາຍເຊື່ອມຕໍ່ກັບສາຍຕໍ່ກັນ. ນອກຈາກນັ້ນ, ຫຼີກເວັ້ນການເສັ້ນທາງຂະຫນານທາງໄກ.
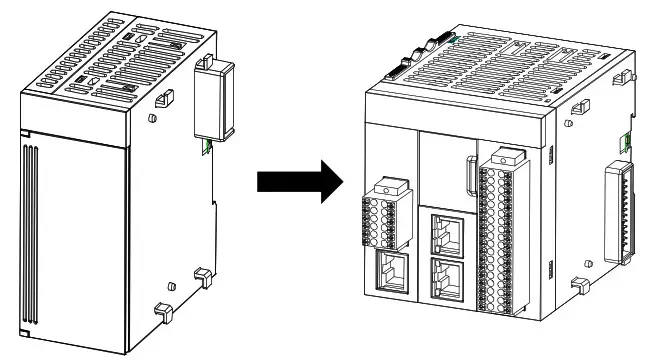
ການຕິດຕັ້ງໂມດູນ
ການນໍາໃຊ້ການອອກແບບ modular, ການຄວບຄຸມໂຄງການແມ່ນງ່າຍທີ່ຈະຕິດຕັ້ງແລະຮັກສາ. ສໍາລັບໂມດູນ CPU, ວັດຖຸເຊື່ອມຕໍ່ຕົ້ນຕໍແມ່ນໂມດູນການສະຫນອງພະລັງງານແລະການຂະຫຍາຍຕົວ.
ໂມດູນໄດ້ຖືກເຊື່ອມຕໍ່ໂດຍການນໍາໃຊ້ຕົວເຊື່ອມຕໍ່ທີ່ສະຫນອງໂດຍໂມດູນແລະ snap-fits.
ຂັ້ນຕອນການຕິດຕັ້ງແມ່ນດັ່ງຕໍ່ໄປນີ້:
| ຂັ້ນຕອນທີ 1 ເລື່ອນ snap-fit ໃນໂມດູນ CPU ໃນທິດທາງທີ່ສະແດງໃຫ້ເຫັນໃນຮູບຕໍ່ໄປນີ້ (ການນໍາໃຊ້ໂມດູນພະລັງງານ ການເຊື່ອມຕໍ່ສໍາລັບ exampເລ). | ຂັ້ນຕອນທີ 2 ຈັດຕັ້ງໂມດູນ CPU ກັບການເຊື່ອມຕໍ່ໂມດູນພະລັງງານສໍາລັບການ interlocking. |
 | 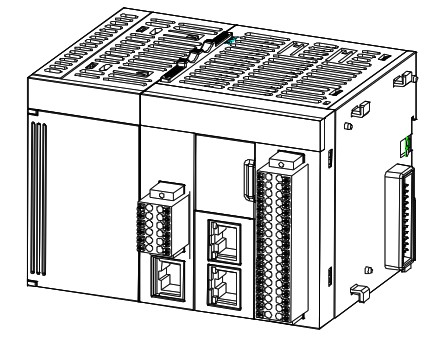 |
| ຂັ້ນຕອນທີ 3 ເລື່ອນ snap-fit ໃນໂມດູນ CPU ໃນທິດທາງທີ່ສະແດງໃຫ້ເຫັນໃນຮູບດັ່ງຕໍ່ໄປນີ້ເພື່ອເຊື່ອມຕໍ່ແລະລັອກສອງໂມດູນ. | ຂັ້ນຕອນທີ 4 ສໍາລັບການຕິດຕັ້ງລາງລົດໄຟ DIN ມາດຕະຖານ, ຕິດໂມດູນທີ່ກ່ຽວຂ້ອງເຂົ້າໄປໃນລາງລົດໄຟການຕິດຕັ້ງມາດຕະຖານຈົນກ່ວາ snap-fit ກົດເຂົ້າໄປໃນສະຖານທີ່. |
 |  |
ການເຊື່ອມຕໍ່ສາຍເຄເບີ້ນແລະຂໍ້ກໍາຫນົດ
ການເຊື່ອມຕໍ່ລົດເມ Ether CAT
ຂໍ້ມູນຈໍາເພາະລົດເມ Ether CAT
| ລາຍການ | ລາຍລະອຽດ |
| ອະນຸສັນຍາການສື່ສານ | Ether CAT |
| ການບໍລິການສະຫນັບສະຫນູນ | COE (PDO/SDO) |
| ຕ່ຳສຸດ ໄລຍະ synchronization | 1ms/4 ແກນ (ຄ່າປົກກະຕິ) |
| ວິທີການ synchronization | DC ສໍາລັບການຊິງຄ໌ / DC ບໍ່ໄດ້ໃຊ້ |
| ຊັ້ນທາງດ້ານຮ່າງກາຍ | 100BASE-TX |
| ໂໝດ Duplex | duplex ເຕັມ |
| ໂຄງສ້າງ topology | ການເຊື່ອມຕໍ່ Serial |
| ກາງສາຍສົ່ງ | ສາຍເຄເບີ້ນເຄືອຂ່າຍ (ເບິ່ງພາກ “ການເລືອກສາຍ”) |
| ໄລຍະການສົ່ງ | ຫນ້ອຍກວ່າ 100m ລະຫວ່າງສອງ nodes |
| ຈໍານວນຂອງຂໍ້ຂອງຂ້າໃຊ້ | ເຖິງ 125 |
| ຄວາມຍາວກອບ Ether CAT | 44 bytes-1498 bytes |
| ຂໍ້ມູນຂະບວນການ | ເຖິງ 1486 bytes ບັນຈຸຢູ່ໃນກອບດຽວ |
ການເລືອກສາຍ
ໂມດູນ CPU ສາມາດປະຕິບັດການສື່ສານລົດເມ Ether CAT ຜ່ານພອດ CN3. ສາຍມາດຕະຖານ INVT ແມ່ນແນະນໍາ. ຖ້າເຈົ້າເຮັດສາຍສື່ສານດ້ວຍຕົວທ່ານເອງ, ໃຫ້ແນ່ໃຈວ່າສາຍໄຟມີຄວາມຕ້ອງການດັ່ງຕໍ່ໄປນີ້:
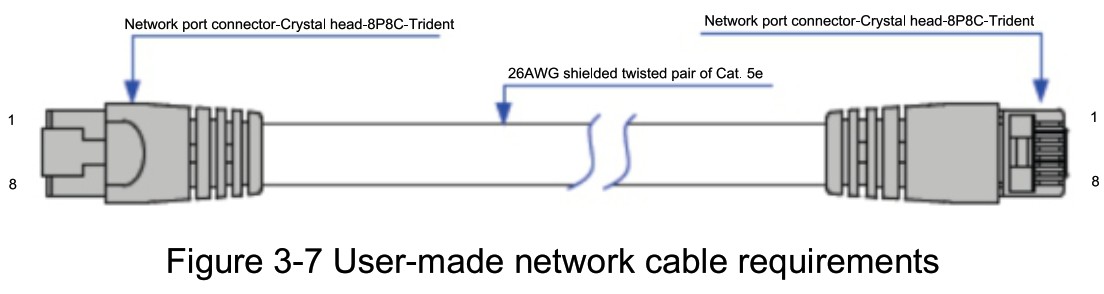
ໝາຍເຫດ:
- ສາຍການສື່ສານທີ່ທ່ານໃຊ້ຕ້ອງຜ່ານການທົດສອບການນໍາ 100%, ບໍ່ມີວົງຈອນສັ້ນ, ວົງຈອນເປີດ, dislocation ຫຼືການຕິດຕໍ່ທີ່ບໍ່ດີ.
- ເພື່ອຮັບປະກັນຄຸນນະພາບການສື່ສານ, ຄວາມຍາວຂອງສາຍການສື່ສານ EtherCAT ບໍ່ສາມາດເກີນ 100 ແມັດ.
- ທ່ານແນະນຳໃຫ້ເຮັດສາຍສື່ສານໂດຍການໃຊ້ສາຍຄູ່ບິດທີ່ປ້ອງກັນຂອງປະເພດ 5e, ສອດຄ່ອງກັບ EIA/TIA568A, EN50173, ISO/IEC11801, EIA/TIA bulletin TSB, ແລະ EIA/TIA SB40-A&TSB36.
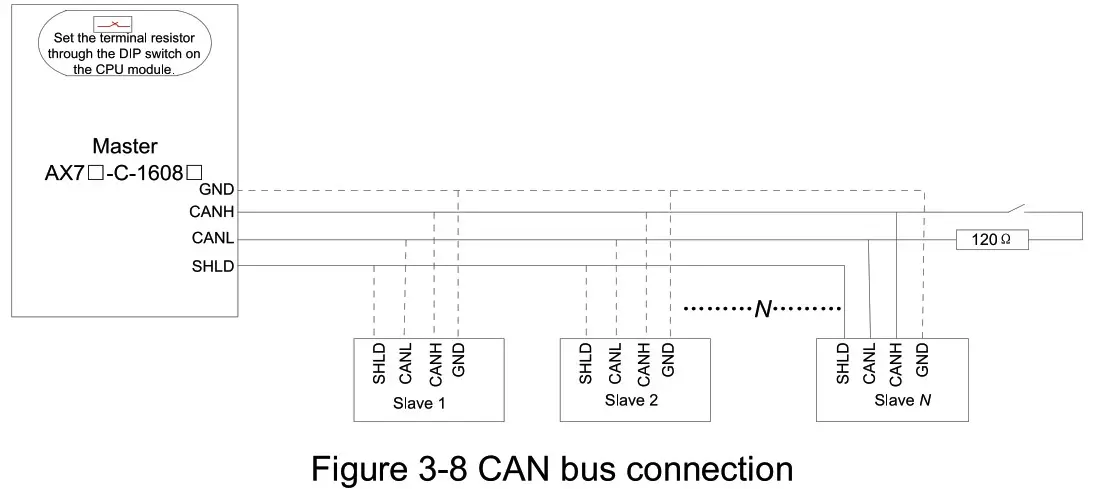
ສາມາດເປີດການເຊື່ອມຕໍ່ສາຍໄດ້
ເຄືອຂ່າຍ
ໂຄງສ້າງ topology ການເຊື່ອມຕໍ່ລົດເມ CAN ແມ່ນສະແດງຢູ່ໃນຮູບຕໍ່ໄປນີ້. ແນະນຳໃຫ້ໃຊ້ຄູ່ບິດທີ່ປ້ອງກັນໄວ້ເພື່ອເຊື່ອມຕໍ່ລົດເມ CAN. ແຕ່ລະປາຍຂອງລົດເມ CAN ເຊື່ອມຕໍ່ກັບ 1200 terminal resistor ເພື່ອປ້ອງກັນການສະທ້ອນຂອງສັນຍານ. ໃນກໍລະນີຫຼາຍທີ່ສຸດ, ຊັ້ນໄສ້ໃຊ້ຈຸດດຽວ.
ການເລືອກສາຍ
- ສໍາລັບ AX7-C-1608P ໂມດູນ CPU, terminal ດຽວກັນຖືກນໍາໃຊ້ສໍາລັບທັງສອງການສື່ສານ CANopen ແລະການສື່ສານ RS485, ການນໍາໃຊ້ DB9 connector ສໍາລັບການສົ່ງຂໍ້ມູນ. pins ໃນຕົວເຊື່ອມຕໍ່ DB9 ໄດ້ຖືກອະທິບາຍກ່ອນຫນ້ານີ້.
- ສໍາລັບ AX7ໂມດູນ CPU 1-C-1608N, terminal RJ45 ຖືກນໍາໃຊ້ສໍາລັບການສື່ສານ CANopen ສໍາລັບການສົ່ງຂໍ້ມູນ. pins ໃນ RJ45 connector ໄດ້ຖືກອະທິບາຍກ່ອນຫນ້ານີ້.
ສາຍມາດຕະຖານ INVT ແມ່ນແນະນໍາ. ຖ້າທ່ານເຮັດສາຍເຄເບີ້ນສື່ສານດ້ວຍຕົນເອງ, ເຮັດສາຍໄຟຕາມລາຍລະອຽດຂອງ pin ແລະຮັບປະກັນຂະບວນການຜະລິດແລະຕົວກໍານົດການດ້ານວິຊາການຕອບສະຫນອງຄວາມຕ້ອງການການສື່ສານ.
ໝາຍເຫດ:
- ເພື່ອເພີ່ມຄວາມສາມາດໃນການຕ້ານການລົບກວນຂອງສາຍເຄເບີນ, ທ່ານແນະນໍາໃຫ້ໃຊ້ແຜ່ນປ້ອງກັນແຜ່ນອາລູມິນຽມແລະເຕັກນິກການປ້ອງກັນສາຍອາລູມິນຽມ - ແມກນີຊຽມໃນເວລາທີ່ເຮັດສາຍ.
- ໃຊ້ເຕັກນິກການບິດຄູ່ສໍາລັບສາຍຕ່າງ.
RS485 ການເຊື່ອມຕໍ່ການສື່ສານ serial
ໂມດູນ CPU ຮອງຮັບ 2 ຊ່ອງທາງການສື່ສານ RS485.
- ສໍາລັບ AX7-C-1608P ໂມດູນ CPU, ພອດ COM1 ແລະ COM2 ໃຊ້ຕົວເຊື່ອມຕໍ່ DB9 ສໍາລັບການສົ່ງຂໍ້ມູນ. pins ໃນຕົວເຊື່ອມຕໍ່ DB9 ໄດ້ຖືກອະທິບາຍກ່ອນຫນ້ານີ້.
- ສໍາລັບ AX7-C-1608N ໂມດູນ CPU, ພອດໃຊ້ 12-pin push-in terminal connector ສໍາລັບການສົ່ງຂໍ້ມູນ. pins ໃນຕົວເຊື່ອມຕໍ່ terminal ໄດ້ຖືກອະທິບາຍກ່ອນຫນ້ານີ້.
ສາຍມາດຕະຖານ INVT ແມ່ນແນະນໍາ. ຖ້າທ່ານເຮັດສາຍເຄເບີ້ນສື່ສານດ້ວຍຕົນເອງ, ເຮັດສາຍໄຟຕາມລາຍລະອຽດຂອງ pin ແລະຮັບປະກັນຂະບວນການຜະລິດແລະຕົວກໍານົດການດ້ານວິຊາການຕອບສະຫນອງຄວາມຕ້ອງການການສື່ສານ.
ໝາຍເຫດ:
- ເພື່ອເພີ່ມຄວາມສາມາດໃນການຕ້ານການລົບກວນຂອງສາຍເຄເບີນ, ທ່ານແນະນໍາໃຫ້ໃຊ້ແຜ່ນປ້ອງກັນແຜ່ນອາລູມິນຽມແລະເຕັກນິກການປ້ອງກັນສາຍອາລູມິນຽມ - ແມກນີຊຽມໃນເວລາທີ່ເຮັດສາຍ.
- ໃຊ້ເຕັກນິກການບິດຄູ່ສໍາລັບສາຍຕ່າງ.
ການເຊື່ອມຕໍ່ອີເທີເນັດ
ເຄືອຂ່າຍ
ພອດອີເທີເນັດຂອງໂມດູນ CPU ແມ່ນ CN4, ເຊິ່ງສາມາດເຊື່ອມຕໍ່ກັບອຸປະກອນອື່ນເຊັ່ນຄອມພິວເຕີຫຼືອຸປະກອນ HMI ໂດຍໃຊ້ສາຍເຄືອຂ່າຍໃນໂຫມດຈຸດຕໍ່ຈຸດ.
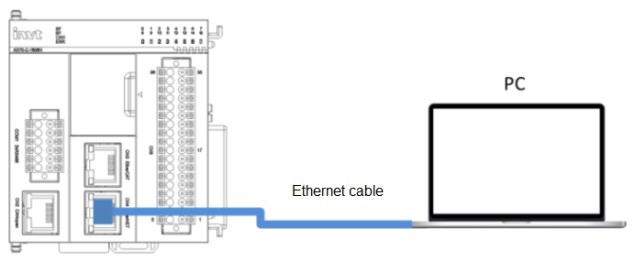
ຮູບທີ 3-9 ການເຊື່ອມຕໍ່ອີເທີເນັດ
ນອກນັ້ນທ່ານຍັງສາມາດເຊື່ອມຕໍ່ພອດ Ethernet ກັບ hub ຫຼືສະຫຼັບໂດຍການນໍາໃຊ້ສາຍເຄືອຂ່າຍ, ປະຕິບັດການເຊື່ອມຕໍ່ຫຼາຍຈຸດ.

ຮູບທີ 3-10 ເຄືອຂ່າຍອີເທີເນັດ
ການເລືອກສາຍ
ເພື່ອປັບປຸງຄວາມໜ້າເຊື່ອຖືໃນການສື່ສານ, ໃຫ້ໃຊ້ສາຍຄູ່ບິດທີ່ປ້ອງກັນປະເພດ 5 ຫຼືສູງກວ່າເປັນສາຍອີເທີເນັດ. ສາຍມາດຕະຖານ INVT ແມ່ນແນະນໍາ.
ໃຊ້ຄໍາແນະນໍາ
ຕົວກໍານົດການດ້ານວິຊາການ
ຂໍ້ມູນຈໍາເພາະທົ່ວໄປຂອງໂມດູນ CPU
| ລາຍການ | ລາຍລະອຽດ | |||||
| ການປ້ອນຂໍ້ມູນ voltage | 24VDC | |||||
| ການບໍລິໂພກພະລັງງານ | < 15W | |||||
| ພະລັງງານລົ້ມເຫຼວ ເວລາປົກປັກຮັກສາ | 300ms (ບໍ່ມີການປ້ອງກັນພາຍໃນ 20 ວິນາທີຫຼັງຈາກເປີດເຄື່ອງ) | |||||
| ຫມໍ້ໄຟສໍາຮອງຂໍ້ມູນຂອງ ໂມງຕາມເວລາຈິງ | ສະຫນັບສະຫນູນ | |||||
| ພະລັງງານລົດເມ backplane ການສະຫນອງ | 5V/2.5A | |||||
| ວິທີການຂຽນໂປແກຼມ | IEC 61131-3 ພາສາການຂຽນໂປຣແກຣມ (LD, FBD, IL, ST, SFC, ແລະ CFC) | |||||
| ການປະຕິບັດໂຄງການ ວິທີການ | ທ້ອງຖິ່ນອອນໄລນ໌ | |||||
| ການເກັບຮັກສາໂຄງການຜູ້ໃຊ້ ຊ່ອງ | 10MB | |||||
| ພື້ນທີ່ຄວາມຈຳ Flash ສໍາລັບຄວາມລົ້ມເຫຼວຂອງພະລັງງານ ການປົກປ້ອງ | 512KB | |||||
| SD ກາດ ຂໍ້ມູນສະເພາະ | 32G MicroSD | |||||
| ອົງປະກອບອ່ອນແລະ ລັກສະນະ | ||||||
| ອົງປະກອບ | ຊື່ | ນັບ | ຄຸນລັກສະນະການເກັບຮັກສາ | |||
| ຄ່າເລີ່ມຕົ້ນ | Wrltable | ລາຍລະອຽດ | ||||
| I | ການປ້ອນຂໍ້ມູນ Relay | 64KWord | ບໍ່ບັນທຶກ | ບໍ່ | X: 1 bits B. 8 bits W: 16 bits D: 32 bits L: 64 bits | |
| Q | ການຖ່າຍທອດສັນຍານອອກ | 64KWord | ບໍ່ບັນທຶກ | ບໍ່ | ||
| M | ຜົນຜະລິດຊ່ວຍເຫຼືອ | 256KWord | ບັນທຶກ | ແມ່ນແລ້ວ | ||
| ການຮັກສາໂຄງການ ວິທີອຳນາດ ຄວາມລົ້ມເຫຼວ | ການຮັກສາໄວ້ໂດຍແຟດພາຍໃນ | |||||
| ໂໝດຂັດຂວາງ | ສັນຍານ DI ຄວາມໄວສູງຂອງໂມດູນ CPU ສາມາດຖືກຕັ້ງເປັນການລົບກວນການປ້ອນຂໍ້ມູນ, ອະນຸຍາດໃຫ້ເຖິງແປດຈຸດຂອງການປ້ອນຂໍ້ມູນ, ແລະຮູບແບບການຂັດຂວາງຂອບແລະຫຼຸດລົງສາມາດຕັ້ງຄ່າໄດ້. | |||||
ຂໍ້ມູນສະເພາະ I/O ຄວາມໄວສູງ
ຂໍ້ມູນສະເພາະການປ້ອນຂໍ້ມູນຄວາມໄວສູງ
| ລາຍການ | ສະເພາະ | |
| ຊື່ສັນຍານ | ການປ້ອນຂໍ້ມູນຄວາມແຕກຕ່າງຄວາມໄວສູງ | ຄວາມໄວສູງສຸດດຽວ input |
| ການປ້ອນຂໍ້ມູນໃຫ້ຄະແນນ voltage | 2.5V | 24VDC (-15% — +20%, ແຮງດັນ ພາຍໃນ 5%) |
| ການປ້ອນຂໍ້ມູນໃຫ້ຄະແນນ ປະຈຸບັນ | 6.8mA | 5.7mA (ຄ່າປົກກະຕິ) (ທີ່ 24V DC) |
| ຢູ່ໃນປະຈຸບັນ | / | ໜ້ອຍກວ່າ 2mA |
| ປິດປັດຈຸບັນ | / | ໜ້ອຍກວ່າ 1mA |
| ການຕໍ່ຕ້ານການປ້ອນຂໍ້ມູນ | 5400 | 2.2k0 |
| ສູງສຸດ. ການນັບ ຄວາມໄວ | 800K Pulses/s (2PH ຄວາມຖີ່ສີ່ເທົ່າ), 200kHz (ຊ່ອງສຽບດຽວ) | |
| 2PH ຫນ້າທີ່ປ້ອນຂໍ້ມູນ ອັດຕາສ່ວນ | 40%. 60% | |
| ສະຖານີທົ່ວໄປ | / | ຫນຶ່ງ terminal ທົ່ວໄປຖືກນໍາໃຊ້. |
ສະເພາະຜົນຜະລິດຄວາມໄວສູງ
| ລາຍການ | ຂໍ້ມູນຈໍາເພາະ |
| ຊື່ສັນຍານ | ຜົນຜະລິດ (YO–Y7) |
| ຂົ້ວອອກ | AX7 AX7 |
| ວົງຈອນຄວບຄຸມ voltage | DC 5V-24V |
| ການຈັດອັນດັບປະຈຸບັນການໂຫຼດ | 100mA/ຈຸດ, 1A/COM |
| ສູງສຸດ. ສະບັບເລກທີtage ຫຼຸດລົງຢູ່ທີ່ ON | 0.2V (ຄ່າປົກກະຕິ) |
| ກະແສໄຟຟ້າຮົ່ວຢູ່ OFF | ໜ້ອຍກວ່າ 0.1mA |
| ຄວາມຖີ່ຂອງຜົນຜະລິດ | 200kHz (ຜົນຜະລິດຂອງ 200kHz ຕ້ອງການການໂຫຼດທຽບເທົ່າເຊື່ອມຕໍ່ພາຍນອກຈະຕ້ອງຫຼາຍກວ່າ 12mA. |
| ສະຖານີທົ່ວໄປ | ທຸກໆແປດຈຸດໃຊ້ຫນຶ່ງ terminal ທົ່ວໄປ. |
ໝາຍເຫດ:
- ພອດ I/O ຄວາມໄວສູງມີຂໍ້ຈໍາກັດກ່ຽວກັບຄວາມຖີ່ທີ່ອະນຸຍາດ. ຖ້າຄວາມຖີ່ຂອງການປ້ອນຂໍ້ມູນຫຼືຜົນຜະລິດເກີນຄ່າທີ່ອະນຸຍາດ, ການຄວບຄຸມແລະການກໍານົດອາດຈະຜິດປົກກະຕິ. ຈັດວາງພອດ I/O ຢ່າງຖືກຕ້ອງ.
- ອິນເຕີເຟດການປ້ອນຂໍ້ມູນຄວາມແຕກຕ່າງຄວາມໄວສູງບໍ່ຍອມຮັບລະດັບການປ້ອນຂໍ້ມູນຄວາມດັນທີ່ສູງກວ່າ 7V. ຖ້າບໍ່ດັ່ງນັ້ນ, ວົງຈອນປ້ອນຂໍ້ມູນອາດຈະເສຍຫາຍ.
ການແນະນຳ ແລະ ດາວໂຫລດໂປຼແກຼມໂປຼແກຼມ
ການແນະນຳໂປຼແກຼມໂປຼແກຼມ
INVTMATIC Studio ແມ່ນຊອບແວຄວບຄຸມໂປຣແກຣມຄວບຄຸມທີ່ INVT ພັດທະນາ. ມັນສະຫນອງສະພາບແວດລ້ອມການພັດທະນາການຂຽນໂປລແກລມແບບເປີດແລະປະສົມປະສານຢ່າງເຕັມສ່ວນກັບເຕັກໂນໂລຢີທີ່ກ້າວຫນ້າແລະຫນ້າທີ່ທີ່ມີປະສິດທິພາບສໍາລັບການພັດທະນາໂຄງການທີ່ອີງໃສ່ພາສາການຂຽນໂປຼແກຼມທີ່ສອດຄ່ອງກັບ IEC 61131-3. ມັນຖືກນໍາໃຊ້ຢ່າງກວ້າງຂວາງໃນພະລັງງານ, ການຂົນສົ່ງ, ເທດສະບານ, ໂລຫະ, ເຄມີ, ຢາ, ອາຫານ, ແຜ່ນແພ, ການຫຸ້ມຫໍ່, ການພິມ, ຢາງແລະພາດສະຕິກ, ເຄື່ອງມືເຄື່ອງຈັກແລະອຸດສາຫະກໍາທີ່ຄ້າຍຄືກັນ.
ສະພາບແວດລ້ອມແລ່ນແລະດາວໂຫຼດ
ທ່ານສາມາດຕິດຕັ້ງ Invtmatic Studio ເທິງຄອມພິວເຕີຕັ້ງໂຕະ ຫຼືແບບເຄື່ອນທີ່, ເຊິ່ງໃນນັ້ນລະບົບປະຕິບັດການແມ່ນຢ່າງໜ້ອຍ Windows 7, ພື້ນທີ່ຄວາມຈຳຢ່າງໜ້ອຍ 2GB, ພື້ນທີ່ຮາດແວຟຣີແມ່ນຢ່າງໜ້ອຍ 10GB, ແລະ ຄວາມຖີ່ຫຼັກຂອງ CPU ແມ່ນສູງກວ່າ 2GHz. ຫຼັງຈາກນັ້ນ, ທ່ານສາມາດເຊື່ອມຕໍ່ຄອມພິວເຕີຂອງທ່ານກັບໂມດູນ CPU ຂອງຕົວຄວບຄຸມໂຄງການໂດຍຜ່ານສາຍເຄືອຂ່າຍແລະແກ້ໄຂບັນດາໂຄງການຜູ້ໃຊ້ໂດຍຜ່ານຊອບແວ Invtmatic Studio ເພື່ອໃຫ້ທ່ານສາມາດດາວໂຫລດແລະແກ້ໄຂບັນດາໂຄງການຜູ້ໃຊ້.
ຕົວຢ່າງການຂຽນໂປລແກລມ
ຕໍ່ໄປນີ້ອະທິບາຍວິທີການດໍາເນີນໂຄງການໂດຍໃຊ້ example (AX72-C-1608N).
ກ່ອນອື່ນ ໝົດ, ເຊື່ອມຕໍ່ທຸກໂມດູນຮາດແວຂອງຕົວຄວບຄຸມທີ່ສາມາດຂຽນໄດ້, ລວມທັງການເຊື່ອມຕໍ່ການສະຫນອງພະລັງງານກັບໂມດູນ CPU, ເຊື່ອມຕໍ່ໂມດູນ CPU ກັບຄອມພິວເຕີທີ່ Invtmatic Studio ໄດ້ຕິດຕັ້ງແລະກັບໂມດູນຂະຫຍາຍທີ່ຕ້ອງການ, ແລະເຊື່ອມຕໍ່ລົດເມ EtherCAT ກັບ. ຂັບ motor ໄດ້. ເລີ່ມ Invtmatic Studio ເພື່ອສ້າງໂປຣເຈັກ ແລະປະຕິບັດການກຳນົດຄ່າໂປຣແກຣມ.
ຂັ້ນຕອນການດັ່ງຕໍ່ໄປນີ້:
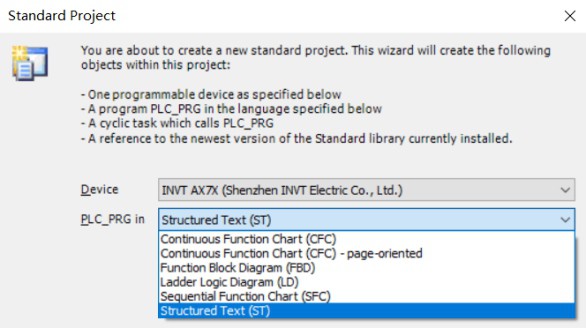
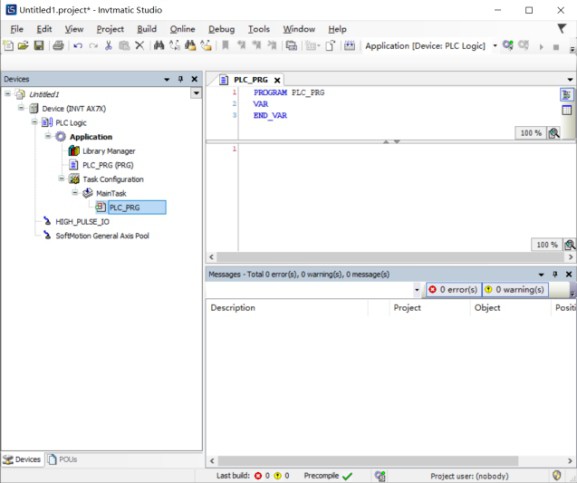
ຂັ້ນຕອນທີ 1 ເລືອກ File > ໂຄງການໃຫມ່, ເລືອກປະເພດໂຄງການມາດຕະຖານ, ແລະກໍານົດສະຖານທີ່ປະຫຍັດໂຄງການແລະຊື່. ກົດ OK. ຫຼັງຈາກນັ້ນ, ເລືອກອຸປະກອນ INVT AX7X ແລະພາສາການຂຽນໂປລແກລມໂຄງສ້າງ (ST) ຢູ່ໃນປ່ອງຢ້ຽມການຕັ້ງຄ່າໂຄງການມາດຕະຖານທີ່ປາກົດ. ການຕັ້ງຄ່າ CODESYS ແລະການໂຕ້ຕອບການຂຽນໂປລແກລມຈະປາກົດຂຶ້ນ.
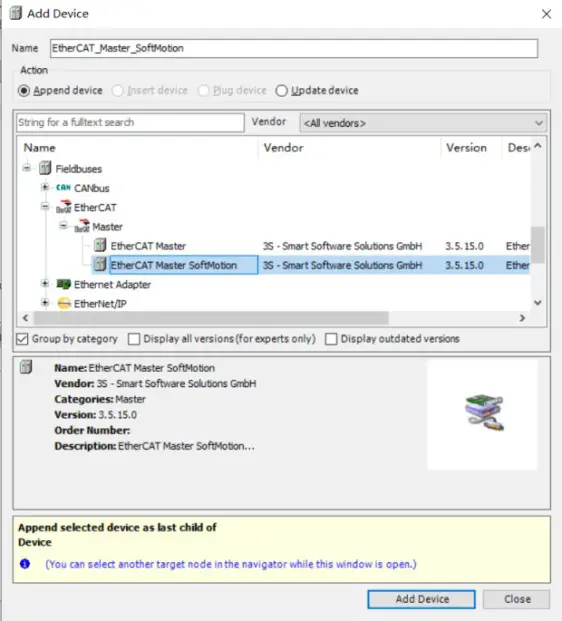
ຂັ້ນຕອນທີ 2 ສິດຄລິກໃສ່ຕົ້ນໄມ້ນໍາທິດອຸປະກອນ. ຈາກນັ້ນເລືອກເພີ່ມອຸປະກອນ. ເລືອກ Ether CAT Master Motion Soft.
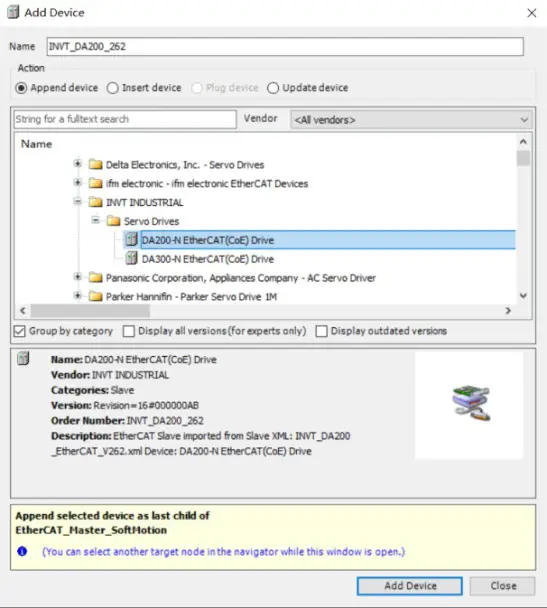
ຂັ້ນຕອນທີ 3 ຄລິກຂວາ EtherCAT_Master_SoftMotion ຢູ່ໃນຕົ້ນໄມ້ນໍາທາງຊ້າຍ. ເລືອກເພີ່ມອຸປະກອນ. ເລືອກ DA200-N Ether CAT(CoE) Drive ຢູ່ໃນປ່ອງຢ້ຽມທີ່ປາກົດ.
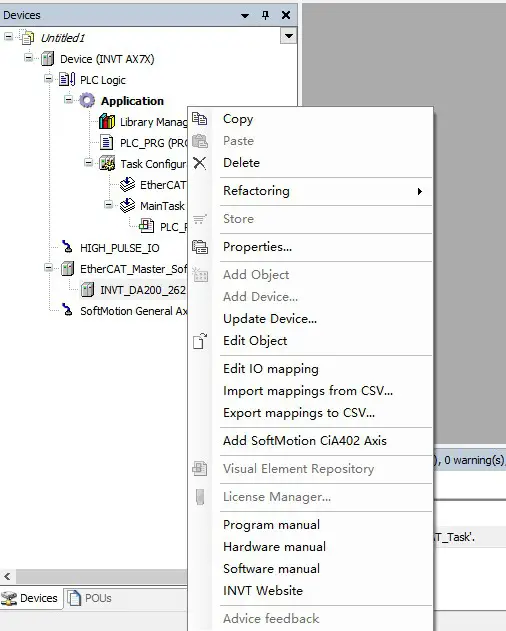
ຂັ້ນຕອນທີ 4 ເລືອກ Add SoftMotion CiA402 Axis ໃນເມນູທາງລັດທີ່ປາກົດ.
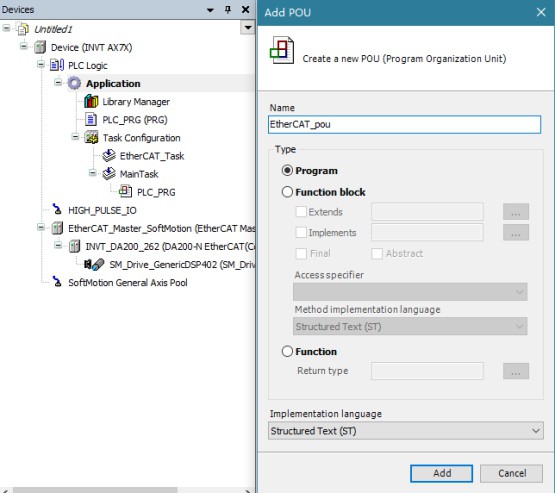
ຂັ້ນຕອນທີ 5 ຄລິກຂວາທີ່ຄໍາຮ້ອງສະຫມັກໃນຕົ້ນໄມ້ນໍາທາງຊ້າຍແລະເລືອກທີ່ຈະເພີ່ມ EtherCAT POU. ຄລິກສອງເທື່ອທີ່ EtherCAT_Task ທີ່ສ້າງຂຶ້ນໂດຍອັດຕະໂນມັດເພື່ອເອີ້ນໃຊ້. ເລືອກ EtherCAT_pou ທີ່ສ້າງຂຶ້ນ. ຂຽນໂຄງການຄໍາຮ້ອງສະຫມັກໂດຍອີງໃສ່ຂະບວນການຄວບຄຸມຄໍາຮ້ອງສະຫມັກ.
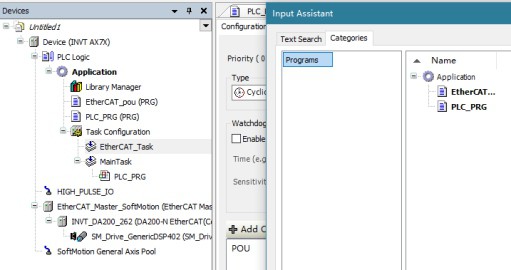
ຂັ້ນຕອນທີ 6 Double-click the Device navigation tree, click Scan Network, ເລືອກ AX72-C-1608N ທີ່ສະແດງໃນຮູບຕໍ່ໄປນີ້, ແລະຄລິກ Wink. ຫຼັງຈາກນັ້ນ, ໃຫ້ຄລິກໃສ່ OK ໃນເວລາທີ່
ຕົວຊີ້ບອກລະບົບ CPU ກະພິບ.
ຂັ້ນຕອນທີ 7 Double-click EtherCAT_Task ພາຍໃຕ້ Task Configuration ໃນແຖບດ້ານຊ້າຍ. ກໍານົດບູລິມະສິດຂອງວຽກງານແລະໄລຍະການປະຕິບັດໂດຍອີງໃສ່ຄວາມຕ້ອງການຂອງວຽກງານໃນເວລາທີ່ແທ້ຈິງ.
ໃນ Invtmatic Studio, ທ່ານສາມາດຄລິກໃສ່ ![]() ເພື່ອລວບລວມບັນດາໂຄງການ, ແລະທ່ານສາມາດກວດເບິ່ງຂໍ້ຜິດພາດຕາມບັນທຶກ. ຫຼັງຈາກການຢືນຢັນການສັງລວມແມ່ນຖືກຕ້ອງຢ່າງເຕັມທີ່, ທ່ານສາມາດຄລິກໃສ່
ເພື່ອລວບລວມບັນດາໂຄງການ, ແລະທ່ານສາມາດກວດເບິ່ງຂໍ້ຜິດພາດຕາມບັນທຶກ. ຫຼັງຈາກການຢືນຢັນການສັງລວມແມ່ນຖືກຕ້ອງຢ່າງເຕັມທີ່, ທ່ານສາມາດຄລິກໃສ່ ![]() ເພື່ອເຂົ້າສູ່ລະບົບແລະດາວໂຫລດໂປແກຼມຜູ້ໃຊ້ໃສ່ຕົວຄວບຄຸມທີ່ສາມາດຂຽນໄດ້ແລະທ່ານສາມາດປະຕິບັດການດີບັກ simulation.
ເພື່ອເຂົ້າສູ່ລະບົບແລະດາວໂຫລດໂປແກຼມຜູ້ໃຊ້ໃສ່ຕົວຄວບຄຸມທີ່ສາມາດຂຽນໄດ້ແລະທ່ານສາມາດປະຕິບັດການດີບັກ simulation.
ການກວດສອບກ່ອນການເລີ່ມຕົ້ນແລະການບໍາລຸງຮັກສາປ້ອງກັນ
ກວດເບິ່ງກ່ອນການເລີ່ມຕົ້ນ
ຖ້າທ່ານໄດ້ສໍາເລັດການສາຍໄຟ, ໃຫ້ແນ່ໃຈວ່າດັ່ງຕໍ່ໄປນີ້ກ່ອນທີ່ຈະເລີ່ມໂມດູນທີ່ຈະເຮັດວຽກ:
- ສາຍອອກຂອງໂມດູນຕອບສະຫນອງຄວາມຕ້ອງການ.
- ການໂຕ້ຕອບການຂະຫຍາຍຢູ່ໃນທຸກລະດັບແມ່ນເຊື່ອມຕໍ່ຢ່າງຫນ້າເຊື່ອຖື.
- ໂປລແກລມແອັບພລິເຄຊັນໃຊ້ວິທີການປະຕິບັດງານທີ່ຖືກຕ້ອງແລະການຕັ້ງຄ່າພາລາມິເຕີ.
ບໍາລຸງຮັກສາປ້ອງກັນ
ປະຕິບັດການບໍາລຸງຮັກສາການປ້ອງກັນດັ່ງຕໍ່ໄປນີ້:
- ອະນາໄມຕົວຄວບຄຸມທີ່ຕັ້ງໂປຣແກຣມໄດ້ເປັນປົກກະຕິ, ປ້ອງກັນສິ່ງແປກປະຫຼາດທີ່ຕົກຢູ່ໃນຕົວຄວບຄຸມ, ແລະຮັບປະກັນສະພາບລະບາຍອາກາດທີ່ດີ ແລະລະບາຍຄວາມຮ້ອນໃຫ້ກັບຕົວຄວບຄຸມ.
- ສ້າງຄໍາແນະນໍາການບໍາລຸງຮັກສາແລະທົດສອບຕົວຄວບຄຸມເປັນປົກກະຕິ.
- ກວດເບິ່ງສາຍໄຟ ແລະ terminals ເປັນປົກກະຕິເພື່ອຮັບປະກັນວ່າພວກມັນຖືກຍຶດຢ່າງປອດໄພ.
ຂໍ້ມູນເພີ່ມເຕີມ
ກະລຸນາຮູ້ສຶກວ່າບໍ່ເສຍຄ່າເພື່ອຕິດຕໍ່ພວກເຮົາສໍາລັບຂໍ້ມູນເພີ່ມເຕີມ. ກະລຸນາສະຫນອງຮູບແບບຜະລິດຕະພັນແລະຈໍານວນ serial ໃນເວລາທີ່ເຮັດໃຫ້ການສອບຖາມ.
ເພື່ອໃຫ້ໄດ້ຂໍ້ມູນຜະລິດຕະພັນ ຫຼືການບໍລິການທີ່ກ່ຽວຂ້ອງ, ທ່ານສາມາດ:
- ຕິດຕໍ່ຫ້ອງການທ້ອງຖິ່ນ INVT.
- ຢ້ຽມຢາມ www.invt.com.
- ສະແກນລະຫັດ QR ຕໍ່ໄປນີ້.

ສູນບໍລິການລູກຄ້າ, Shenzhen INVT Electric Co., Ltd.
ທີ່ຢູ່: INVT Guangming Technology Building, Songbai Road, Matian, Guangming District, Shenzhen, ຈີນ
ລິຂະສິດ © INVT. ສະຫງວນລິຂະສິດທັງໝົດ. ຂໍ້ມູນຄູ່ມືອາດຈະມີການປ່ຽນແປງໂດຍບໍ່ມີການແຈ້ງລ່ວງໜ້າ.

202207 (V1.0)
ເອກະສານ / ຊັບພະຍາກອນ
 | ໂມດູນ CPU invt AX7 Series [pdf] ຄູ່ມືການສອນ AX7 Series CPU Module, AX7 Series, CPU Module, ໂມດູນ |



