![]()
AX7 ![]() Manuel d'utilisation du module CPU série
Manuel d'utilisation du module CPU série
Module CPU série AX7
Merci d'avoir choisi le contrôleur programmable de la série AX (contrôleur programmable en abrégé).
Basé sur la plate-forme Invtmatic Studio, le contrôleur programmable prend entièrement en charge les systèmes de programmation IEC61131-3, le bus de terrain en temps réel EtherCAT, le bus de terrain CANopen et les ports haute vitesse, et fournit des fonctions de came électronique, d'engrenage électronique et d'interpolation.
Le manuel décrit principalement les spécifications, les fonctionnalités, le câblage et les méthodes d'utilisation du module CPU de l'automate programmable. Pour vous assurer que vous utilisez le produit en toute sécurité et correctement et que vous le tirez pleinement parti, lisez attentivement le manuel avant l'installation. Pour plus de détails sur les environnements de développement de programme utilisateur et les méthodes de conception de programme utilisateur, consultez le manuel d'utilisation du matériel de l'automate programmable série AX et le manuel d'utilisation du logiciel de l'automate programmable série AX que nous publions.
Le manuel peut être modifié sans préavis. Veuillez visiter http://www.invt.com pour télécharger la dernière version du manuel.
Précautions de sécurité
Avertissement
| Symbole | Nom | Description | Abréviation |
| Danger |
Danger | Des blessures graves ou même la mort peuvent survenir si les exigences connexes ne sont pas respectées. | |
| Avertissement |
Avertissement | Des blessures corporelles ou des dommages matériels peuvent survenir si les exigences connexes ne sont pas respectées. |
Livraison et installation
| • Seuls des professionnels formés et qualifiés sont autorisés à effectuer l'installation, le câblage, la maintenance et l'inspection. • N'installez pas le contrôleur programmable sur des produits inflammables. De plus, évitez que l'automate programmable n'entre en contact avec des matières inflammables ou n'y adhère. • Installez l'automate programmable dans une armoire de commande verrouillable d'au moins IP20, ce qui empêche le personnel sans connaissance de l'équipement électrique de toucher par erreur, car l'erreur peut entraîner des dommages matériels ou un choc électrique. Seul le personnel ayant reçu des connaissances électriques et une formation sur le fonctionnement de l'équipement peut faire fonctionner l'armoire de commande. • Ne faites pas fonctionner l'automate programmable s'il est endommagé ou incomplet. • Ne pas contacter l'automate programmable avec damp des objets ou des parties du corps. Sinon, un choc électrique peut en résulter. |
Sélection de câbles
| • Seuls des professionnels formés et qualifiés sont autorisés à effectuer l'installation, le câblage, la maintenance et l'inspection. • Bien comprendre les types d'interface, les spécifications et les exigences associées avant le câblage. Sinon, un câblage incorrect entraînera fonctionnement anormal. • Couper toutes les alimentations connectées à l'automate programmable avant d'effectuer le câblage. • Avant la mise sous tension pour le fonctionnement, assurez-vous que chaque couvercle de borne de module est correctement installé en place une fois l'installation et le câblage terminés. Cela empêche qu'un terminal sous tension soit touché. Sinon, des blessures corporelles, une défaillance de l'équipement ou un dysfonctionnement peuvent en résulter. • Installez les composants ou dispositifs de protection appropriés lors de l'utilisation d'alimentations externes pour l'automate programmable. Cela empêche l'automate programmable d'être endommagé en raison de défauts d'alimentation externe, de survoltage, surintensité ou autres exceptions. |
Mise en service et fonctionnement
| • Avant la mise sous tension pour le fonctionnement, assurez-vous que l'environnement de travail de l'automate programmable répond aux exigences, que le câblage est correct, que les spécifications d'alimentation d'entrée répondent aux exigences et qu'un circuit de protection a été conçu pour protéger l'automate programmable afin que l'automate programmable contrôleur peut fonctionner en toute sécurité même en cas de défaillance d'un périphérique externe. • Pour les modules ou les terminaux nécessitant une alimentation externe, configurez les dispositifs de sécurité externes tels que les fusibles ou les disjoncteurs pour éviter les dommages causés par l'alimentation externe ou les défauts de l'appareil. |
Entretien et remplacement de composants
| • Seuls des professionnels formés et qualifiés sont autorisés à effectuer l'entretien, l'inspection et le remplacement des composants du contrôleur programmable. • Couper toutes les alimentations connectées à l'automate programmable avant le câblage des bornes. • Pendant l'entretien et le remplacement des composants, prenez des mesures pour empêcher les vis, câbles et autres matériaux conducteurs de tomber à l'intérieur de l'automate programmable. |
Élimination
| Le contrôleur programmable contient des métaux lourds. Éliminer un automate programmable mis au rebut comme un déchet industriel. | |
| Jetez un produit de rebut séparément dans un point de collecte approprié, mais ne le placez pas dans le flux de déchets normal. |
Présentation du produit
Modèle et plaque signalétique
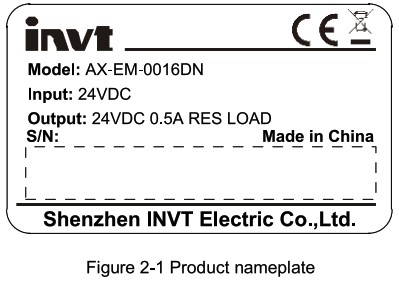
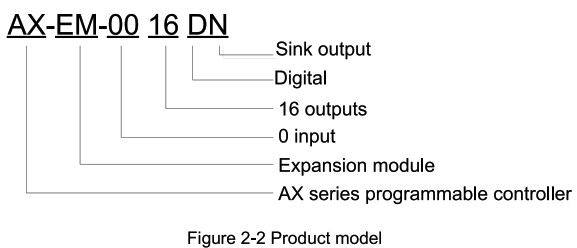
Fonction surview
En tant que module de contrôle principal de l'automate programmable, le module CPU AX7J-C-1608L] (module CPU en abrégé) a les fonctions suivantes :
- Réalise le contrôle, la surveillance, le traitement des données et la communication en réseau pour le système en cours d'exécution.
- Prend en charge les langages de programmation IL, ST, FBD, LD, CFC et SFC conformes aux normes IEC61131-3 en utilisant la plate-forme Invtmatic Studio lancée par INVT pour la programmation.
- Prend en charge 16 modules d'extension locaux (tels que les modules d'E/S, de température et analogiques).
- Utilise Ether CAT ou CAN open bus pour connecter des modules esclaves, chacun prenant en charge 16 modules d'extension (tels que les modules d'E/S, de température et analogiques).
- Prend en charge le protocole maître/esclave Modbus TCP.
- Intègre deux interfaces RS485, prenant en charge le protocole maître/esclave Modbus RTU.
- Prend en charge les E/S haute vitesse, 16 entrées haute vitesse et 8 sorties haute vitesse.
- Prend en charge le contrôle de mouvement du bus de terrain EtherCAT avec un temps de synchronisation de 1 ms, 2 ms, 4 ms ou 8 ms.
- Prend en charge le contrôle de mouvement à un ou plusieurs axes basé sur des impulsions, y compris l'interpolation linéaire 2-4 axes et l'interpolation d'arc 2 axes.
- Prend en charge l'horloge en temps réel.
- Prend en charge la protection des données en cas de panne de courant.
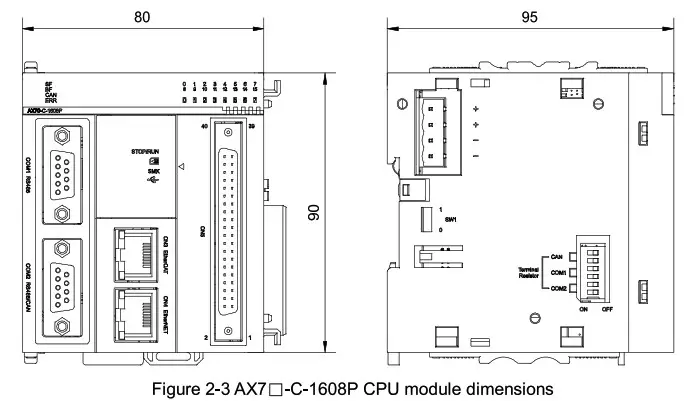
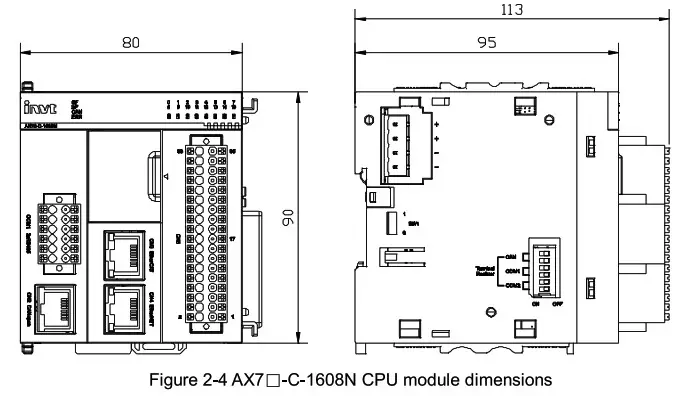
Dimensions structurelles
Les dimensions structurelles (unité : mm) sont indiquées dans la figure suivante.
Interface
Description de l'interface
Répartition des interfaces
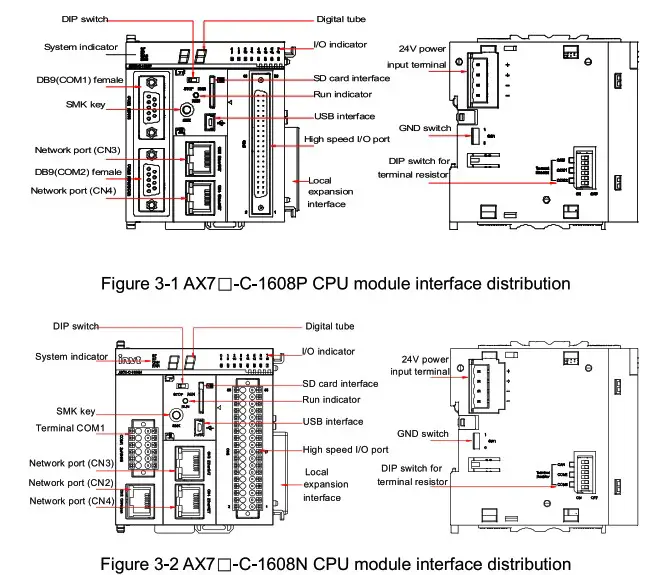
La Figure 3-1 et la Figure 3-2 montrent la distribution de l'interface du module CPU. Pour chaque interface, une description sérigraphique respective est fournie à proximité, ce qui facilite le câblage, l'exploitation et le contrôle.
| Interface | Fonction | |
| Commutateur DIP | Commutateur DIP MARCHE/ARRÊT. | |
| Indicateur système | SF : Indicateur de défaut système. BF : Indicateur de défaut du bus. CAN : Indicateur de défaut du bus CAN. ERR : Indicateur de défaut du module. |
|
| Clé SMK | Clé intelligente SMK. | |
| WO-C-1608P | COM1 (DB9) femelle |
Une interface RS485, prenant en charge Modbus RTU protocole maître/esclave. |
| COM2 (DB9) femelle |
Une interface RS485 et l'autre interface CAN L'interface RS485 prend en charge le protocole maître/esclave Modbus RTU et l'autre interface CAN prend en charge le protocole maître/esclave CANopen. |
|
| AX70-C-1608N | COM1 et COM2 (borne n enfichable) | Deux interfaces RS485, prenant en charge Modbus RTU protocole maître/esclave. |
| CN2 (RJ45) | Interface CAN, prenant en charge le protocole CAN open master/slave. | |
| CN3 (RJ45) | Interface éther CAT | |
| CN4 (RJ45) | 1.Protocole Modbus TCP 2.Fonctions Ethernet standard 3. Téléchargement et débogage du programme utilisateur (uniquement avec IPv4) |
|
| Tube numérique | Affiche les alarmes et répond à l'appui sur la touche SMK. | |
| Voyant E/S | Indique si les signaux de 16 entrées et 8 sorties sont valides. | |
| Interface de carte SD | Utilisé pour stocker des programmes et des données utilisateur. | |
| Indicateur de fonctionnement | Indique si le module CPU est en cours d'exécution. | |
| Interface USB | Utilisé pour télécharger et déboguer des programmes. | |
| E/S à grande vitesse | 16 entrées rapides et 8 sorties rapides. | |
| Interface d'extension locale | Prend en charge l'extension de 16 modules d'E/S, interdisant le remplacement à chaud. | |
| Interface d'alimentation 24V | Alimentation DC 24 Vtage entrée | |
| Interrupteur de mise à la terre | Commutateur de connexion entre la masse numérique interne du système et la masse du boîtier. Il est déconnecté par défaut (SW1 est réglé sur 0). Il n'est utilisé que dans des scénarios spéciaux où la masse numérique interne du système est prise comme plan de référence. Faites preuve de prudence avant de l'utiliser. Sinon, la stabilité du système est affectée. | |
| Commutateur DIP de la résistance terminale | ON indique la connexion de la résistance terminale (il est OFF par défaut). COM1 correspond à RS485-1, COM2 correspond à RS485-2 et CAN correspond à CAN. | |
Clé SMK
La clé SMK est principalement utilisée pour réinitialiser l'adresse IP du module CPU (rP) et effacer les programmes d'application (cA). L'adresse par défaut du module CPU est 192.168.1.10. Si vous souhaitez restaurer l'adresse par défaut à partir d'une adresse IP modifiée, vous pouvez restaurer l'adresse par défaut via la clé SMK. La méthode est la suivante :
- Mettez le module CPU à l'état STOP. Appuyez sur la touche SMK. Lorsque le tube numérique affiche "rP", appuyez et maintenez la touche SMK. Ensuite, le tube numérique affiche "rP" et s'éteint alternativement, indiquant que la réinitialisation de l'adresse IP est en cours. L'opération de réinitialisation réussit lorsque le tube numérique est éteint. Si vous relâchez la touche SMK à ce moment, le tube numérique affiche « rP ». Appuyez sur la touche SMK et maintenez-la enfoncée jusqu'à ce que le tube affiche « 00 » (rP—cA—rU-rP).
- Si vous relâchez la touche SMK pendant le processus au cours duquel le tube numérique affiche « rP » et s'éteint alternativement, l'opération de réinitialisation de l'adresse IP est annulée et le tube numérique affiche « rP ».
Pour effacer un programme du module CPU, procédez comme suit :
Appuyez sur la touche SMK. Lorsque le tube numérique affiche "cA", appuyez et maintenez la touche SMK. Ensuite, le tube numérique affiche "rP" et s'éteint alternativement, indiquant que le programme est en cours d'effacement. Lorsque le tube numérique est éteint, redémarrez le module CPU. Le programme est effacé avec succès.
Description du tube numérique
- Si les programmes n'ont pas de défaut après le téléchargement, le tube numérique du module CPU affiche "00" en continu.
- Si un programme a un défaut, le tube numérique affiche les informations de défaut de manière clignotante.
- Par exempleample, si seul le défaut 19 se produit, le tube numérique affiche « 19 » et s'éteint alternativement. Si le défaut 19 et le défaut 29 se produisent simultanément, le tube numérique affiche "19", s'éteint, affiche "29" et s'éteint alternativement. Si plusieurs défauts se produisent simultanément, le mode d'affichage est similaire.
Définition des bornes
AX7![]() -C-1608P Définition du terminal de communication COM1/COM2
-C-1608P Définition du terminal de communication COM1/COM2
Pour le module CPU AX7LJ-C-1608P, COM1 est le terminal de communication RS485 et COM2 est le terminal de communication RS485/CAN, qui utilisent tous deux un connecteur DB9 pour la transmission de données. Les interfaces et les broches sont décrites ci-après.
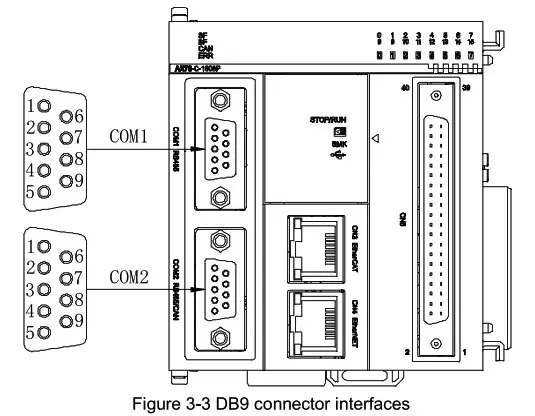
Tableau 3-1 Broches du connecteur COM1/COM2 DB39
| Interface | Distribution | Épingle | Définition | Fonction |
| COM1 (RS485) |
1 | / | / | |
| 2 | / | / | ||
| 3 | / | / | ||
| 4 | RS485A | Signal différentiel RS485 + | ||
| 5 | RS485B | Signal différentiel RS485 – | ||
| 6 | / | / | ||
| 7 | / | / | ||
| 8 | / | / | ||
| 9 | GND_RS485 | Masse d'alimentation RS485 | ||
| COM2 (RS485/CAN) |
1 | / | / | |
| 2 | PUIS-JE | Signal différentiel CAN – | ||
| 3 | / | / | ||
| 4 | RS485A | Signal différentiel RS485 + | ||
| 5 | RS485B | Signal différentiel RS485 – | ||
| 6 | GND_CAN | Mise à la terre de l'alimentation CAN | ||
| 7 | PEUT _H | Signal différentiel CAN + | ||
| 8 | / | / | ||
| 9 | GND_RS485 | Masse d'alimentation RS485 |
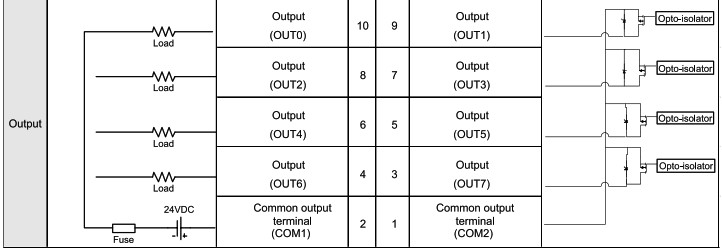
AX7![]() -C-1608P définition du terminal d'E/S haute vitesse
-C-1608P définition du terminal d'E/S haute vitesse
AX7![]() -Le module CPU C-1608P dispose de 16 entrées haute vitesse et de 8 sorties haute vitesse. Les interfaces et les broches sont décrites ci-après.
-Le module CPU C-1608P dispose de 16 entrées haute vitesse et de 8 sorties haute vitesse. Les interfaces et les broches sont décrites ci-après.
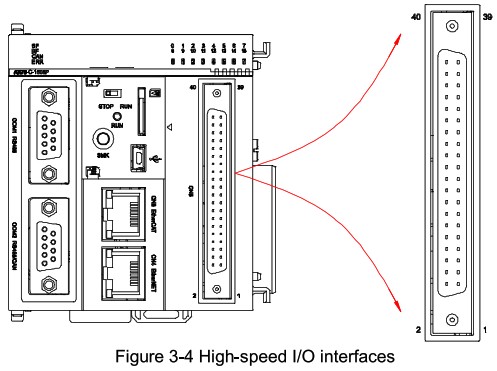
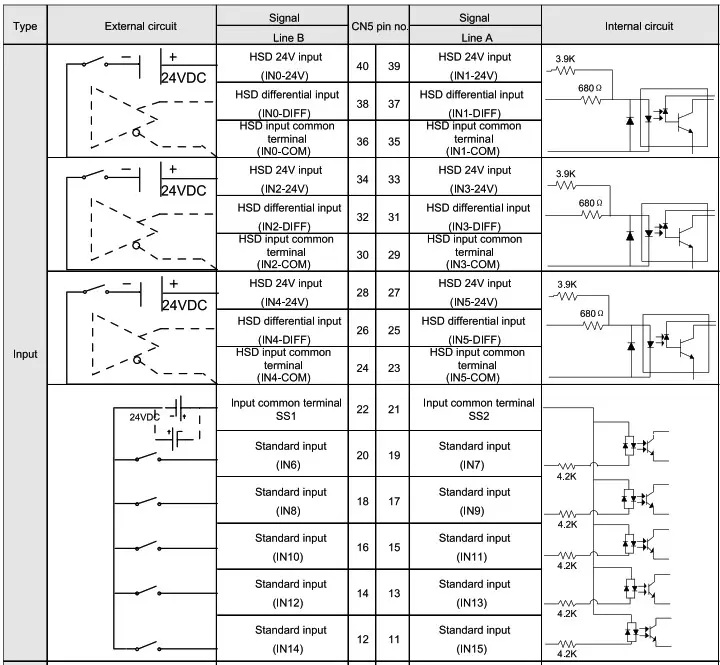
Tableau 3-2 Broches d'E/S à grande vitesse
AX7![]() -C-1608N Définition du terminal de communication COM1/CN2
-C-1608N Définition du terminal de communication COM1/CN2
Pour AX7![]() -Module CPU C-1608N, COM1 est le terminal de communication RS485 à deux canaux, utilisant un connecteur enfichable à 12 broches pour la transmission de données. CN2 est le terminal de communication CAN, utilisant le connecteur RJ45 pour la transmission des données. Les interfaces et les broches sont décrites ci-après.
-Module CPU C-1608N, COM1 est le terminal de communication RS485 à deux canaux, utilisant un connecteur enfichable à 12 broches pour la transmission de données. CN2 est le terminal de communication CAN, utilisant le connecteur RJ45 pour la transmission des données. Les interfaces et les broches sont décrites ci-après.

Tableau 3-3 Broches du connecteur COM1/CN2
| Fonctions de borne enfichable de COM1 | ||||
| Définition | Fonction | Épingle | ||
| COM1RS485 | A | Signal différentiel RS485 + |
12 | |
| B | Signal différentiel RS485 – | 10 | ||
| Terre | Puissance de la puce RS485 _1 sol |
8 | ||
| PE | Blindage au sol | 6 | ||
| COM2RS485 | A | Signal différentiel RS485 + |
11 | |
| B | Signal différentiel RS485 – | 9 | ||
| Terre | Alimentation de la puce RS485_2 sol |
7 | ||
| PE | Blindage au sol | 5 | ||
| Remarque : les broches 1 à 4 ne sont pas utilisées. | ||||
| Fonctions des broches de CN2 | ||||
| Définition | Fonction | Épingle | ||
| CANopen | Terre | Mise à la terre de l'alimentation CAN | 1 | |
| PUIS-JE | Signal différentiel CAN – | 7 | ||
| CAN_H | Signal différentiel CAN + | 8 | ||
| Remarque : les broches 2 à 6 ne sont pas utilisées. | ||||
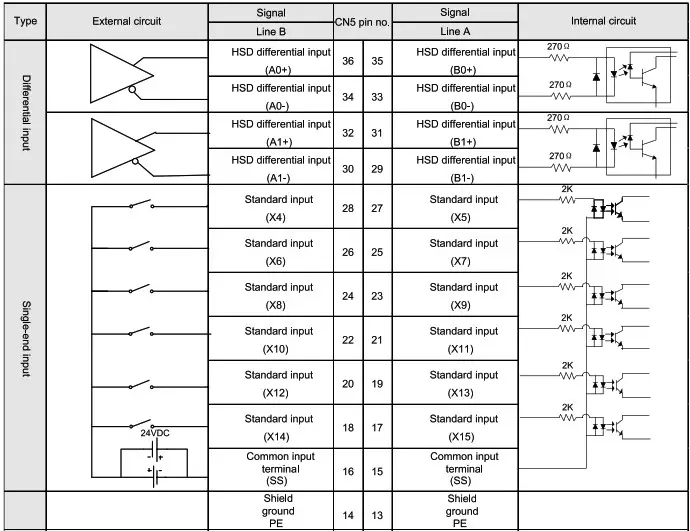
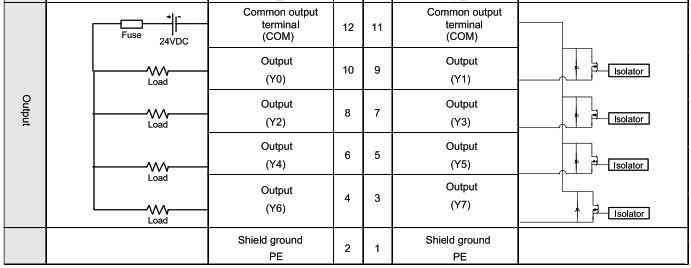
AX7![]() -C-1608N définition du terminal d'E/S haute vitesse
-C-1608N définition du terminal d'E/S haute vitesse
AX7![]() Le module CPU 1-C-1608N dispose de 16 entrées rapides et de 8 sorties rapides. La figure suivante montre la répartition des bornes et le tableau suivant répertorie les broches.
Le module CPU 1-C-1608N dispose de 16 entrées rapides et de 8 sorties rapides. La figure suivante montre la répartition des bornes et le tableau suivant répertorie les broches.
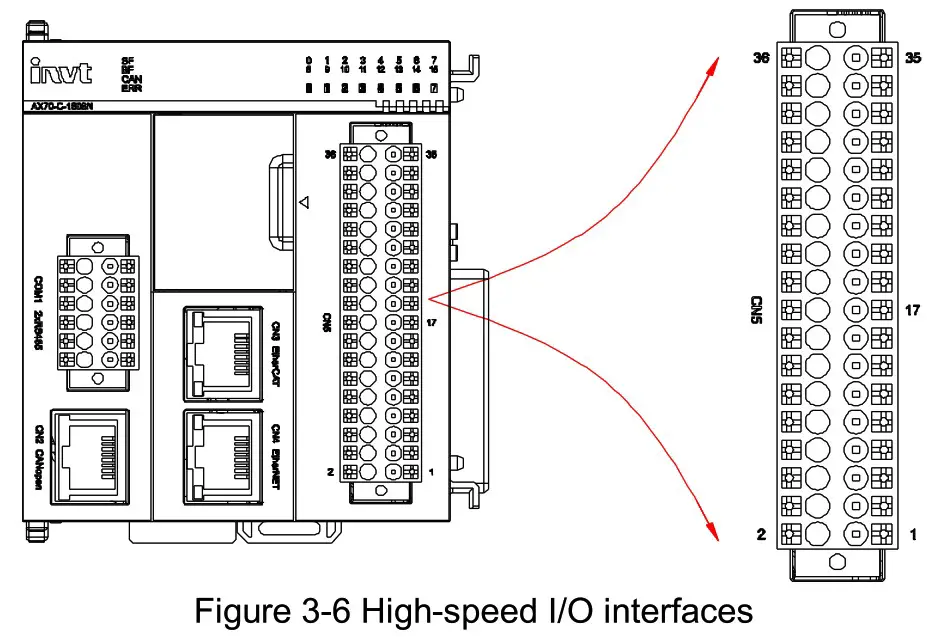
Tableau 3-4 Broches d'E/S à grande vitesse
Note:
- Tous les 16 canaux d'entrée de AX7
 -Le module CPU C-1608P permet une entrée haute vitesse, mais les 6 premiers canaux prennent en charge l'entrée 24V à extrémité unique ou différentielle, et les 10 derniers canaux prennent en charge l'entrée 24V à extrémité unique.
-Le module CPU C-1608P permet une entrée haute vitesse, mais les 6 premiers canaux prennent en charge l'entrée 24V à extrémité unique ou différentielle, et les 10 derniers canaux prennent en charge l'entrée 24V à extrémité unique. - Tous les 16 canaux d'entrée de AX7-Le module CPU C-1608N permet une entrée haute vitesse, mais les 4 premiers canaux prennent en charge l'entrée différentielle et les 12 derniers canaux prennent en charge l'entrée 24V à une extrémité.
- Chaque point d'E/S est isolé du circuit interne.
- La longueur totale du câble de connexion du port E/S haut débit ne peut pas dépasser 3 mètres.
- Ne pliez pas les câbles lors de la fixation des câbles.
- Lors de l'acheminement des câbles, séparez les câbles de connexion des câbles de forte puissance qui provoquent de fortes interférences mais ne liez pas les câbles de connexion avec ces derniers. De plus, évitez le routage parallèle longue distance.
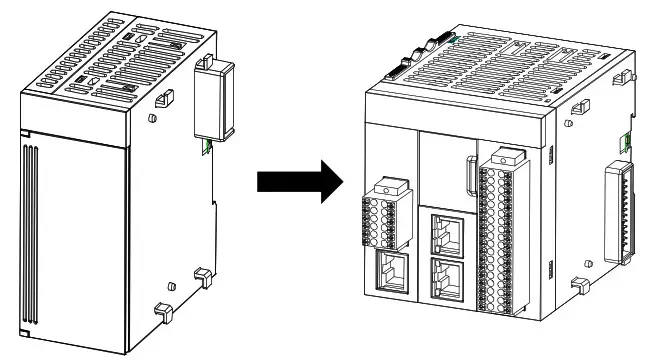
Mise en place des modules
Utilisant une conception modulaire, le contrôleur programmable est facile à installer et à entretenir. Comme pour le module CPU, les principaux objets de connexion sont les modules d'alimentation et d'extension.
Les modules sont connectés à l'aide des interfaces de connexion et des encliquetages fournis par le module.
La procédure de montage est la suivante :
| Étape 1 Faites glisser l'encliquetage sur le module CPU dans la direction indiquée dans la figure suivante (à l'aide du module d'alimentation connexion pour example). |
Étape 2 Alignez le module CPU avec le connecteur du module d'alimentation pour le verrouillage. |
 |
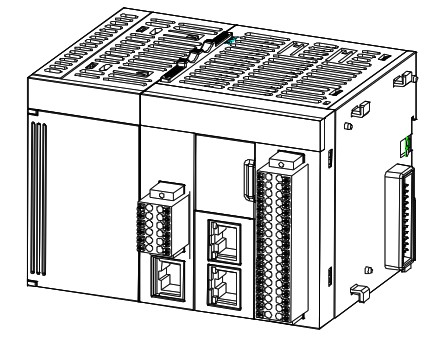 |
| Étape 3 Faites glisser l'encliquetage sur le module CPU dans la direction indiquée dans la figure suivante pour connecter et verrouiller les deux modules. | Étape 4 Comme pour l'installation sur rail DIN standard, accrochez le module respectif dans le rail d'installation standard jusqu'à ce que l'encliquetage s'enclenche. |
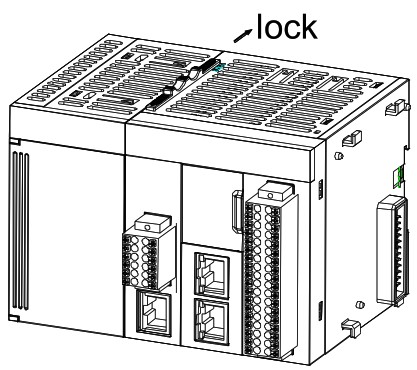 |
 |
Connexion des câbles et spécifications
Connexion au bus Ether CAT
Spécifications du bus Ether CAT
| Article | Description |
| Protocole de communication | Éther CAT |
| Services pris en charge | COE (AOP/SDO) |
| Min. intervalle de synchronisation | 1ms/4 axes (valeur typique) |
| Méthode de synchronisation | DC pour sync/DC inutilisé |
| Couche physique | 100BASE-TX |
| Mode duplex | Duplex intégral |
| Structure topologique | Connexion série |
| Support de transmission | Câble réseau (voir la section "Sélection du câble") |
| Distance de transmission | Moins de 100m entre deux nœuds |
| Nombre de nœuds esclaves | Jusqu'à 125 |
| Longueur de trame Ether CAT | 44 octets-1498 octets |
| Données de processus | Jusqu'à 1486 octets contenus dans une seule trame |
Sélection de câbles
Le module CPU peut implémenter la communication par bus Ether CAT via le port CN3. Les câbles standard INVT sont recommandés. Si vous fabriquez vous-même les câbles de communication, assurez-vous que les câbles répondent aux exigences suivantes :
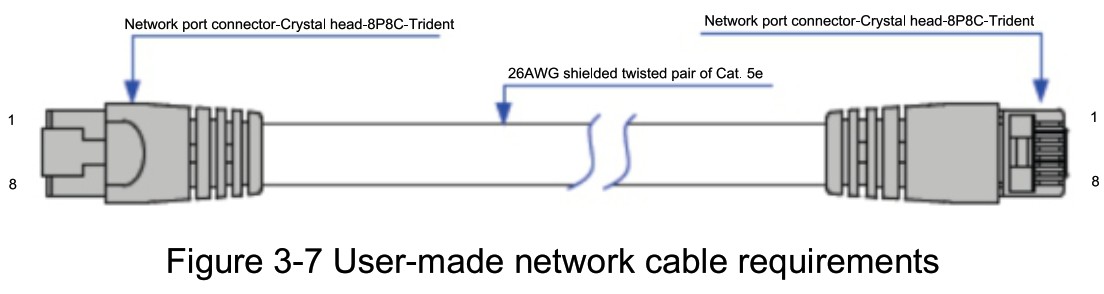
Note:
- Les câbles de communication que vous utilisez doivent réussir le test de conductivité à 100 %, sans court-circuit, circuit ouvert, dislocation ou mauvais contact.
- Pour assurer la qualité de la communication, la longueur du câble de communication EtherCAT ne peut pas dépasser 100 mètres.
- Il est recommandé de réaliser les câbles de communication en utilisant des câbles à paires torsadées blindées de catégorie 5e, conformes aux normes EIA/TIA568A, EN50173, ISO/IEC11801, EIA/TIA bulletin TSB et EIA/TIA SB40-A&TSB36.
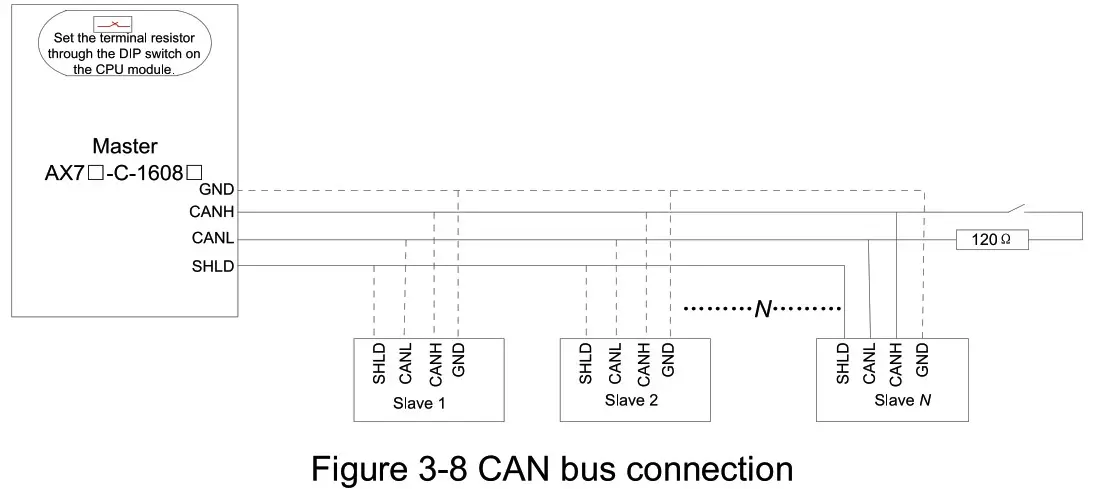
Connexion par câble ouvert CAN
Mise en réseau
La structure de la topologie de connexion du bus CAN est illustrée dans la figure suivante. Il est recommandé d'utiliser la paire torsadée blindée pour la connexion du bus CAN. Chaque extrémité du bus CAN se connecte à une résistance terminale 1200 pour empêcher la réflexion du signal. Dans la plupart des cas, la couche de blindage utilise une mise à la terre en un seul point.
Sélection de câbles
- Pour AX7-Module CPU C-1608P, le même terminal est utilisé pour la communication CANopen et la communication RS485, en utilisant un connecteur DB9 pour la transmission de données. Les broches du connecteur DB9 ont été décrites précédemment.
- Pour AX7Module CPU 1-C-1608N, la borne RJ45 est utilisée pour la communication CANopen pour la transmission de données. Les broches du connecteur RJ45 ont été décrites précédemment.
Les câbles standard INVT sont recommandés. Si vous fabriquez vous-même les câbles de communication, fabriquez-les conformément à la description de la broche et assurez-vous que le processus de fabrication et les paramètres techniques répondent aux exigences de communication.
Note:
- Pour améliorer la capacité anti-interférence des câbles, il est recommandé d'utiliser des techniques de blindage en feuille d'aluminium et de tresse en aluminium-magnésium lors de la fabrication des câbles.
- Utilisez la technique d'enroulement à paire torsadée pour les câbles différentiels.
Connexion de communication série RS485
Le module CPU prend en charge 2 canaux de communication RS485.
- Pour AX7-Module CPU C-1608P, les ports COM1 et COM2 utilisent le connecteur DB9 pour la transmission de données. Les broches du connecteur DB9 ont été décrites précédemment.
- Pour AX7-Module CPU C-1608N, le port utilise le connecteur de terminal push-in à 12 broches pour la transmission de données. Les broches du connecteur de borne ont été décrites précédemment.
Les câbles standard INVT sont recommandés. Si vous fabriquez vous-même les câbles de communication, fabriquez-les conformément à la description de la broche et assurez-vous que le processus de fabrication et les paramètres techniques répondent aux exigences de communication.
Note:
- Pour améliorer la capacité anti-interférence des câbles, il est recommandé d'utiliser des techniques de blindage en feuille d'aluminium et de tresse en aluminium-magnésium lors de la fabrication des câbles.
- Utilisez la technique d'enroulement à paire torsadée pour les câbles différentiels.
Connexion Ethernet
Mise en réseau
Le port Ethernet du module CPU est CN4, qui peut se connecter à un autre périphérique tel qu'un ordinateur ou un périphérique IHM à l'aide d'un câble réseau en mode point à point.
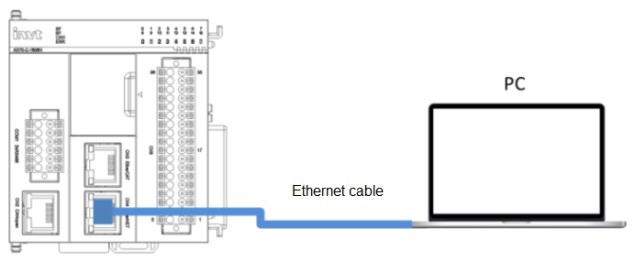
Figure 3-9 Connexion Ethernet
Vous pouvez également connecter le port Ethernet à un concentrateur ou à un commutateur à l'aide d'un câble réseau, mettant en œuvre une connexion multipoint.

Figure 3-10Mise en réseau Ethernet
Sélection de câbles
Pour améliorer la fiabilité de la communication, utilisez des câbles blindés à paires torsadées de catégorie 5 ou supérieure comme câbles Ethernet. Les câbles standard INVT sont recommandés.
Mode d'emploi
Paramètres techniques
Spécifications générales du module CPU
| Article | Description | |||||
| Vol d'entréetage | 24 V CC | |||||
| Consommation d'énergie | < 15 W | |||||
| Panne électrique temps de protection |
300 ms (pas de protection dans les 20 secondes après la mise sous tension) | |||||
| Batterie de secours du horloge temps réel |
Soutenu | |||||
| Alimentation du bus de fond de panier fournir |
5 V/2.5 A | |||||
| Méthode de programmation | Langages de programmation CEI 61131-3 (LD, FBD, IL, ST, SFC, et CFC) |
|||||
| Exécution du programme méthode |
Locale en ligne | |||||
| Stockage du programme utilisateur espace |
10 Mo | |||||
| Espace mémoire flash pour panne de courant protection |
512 Ko | |||||
| carte SD caractéristiques |
MicroSD 32G | |||||
| Éléments souples et caractéristiques |
||||||
| Élément | Nom | Compter | Caractéristiques de stockage | |||
| Défaut | Table de lecture | Description | ||||
| I | Relais d'entrée | 64KMot | Pas enregistrer | Non | X : 1 bit B. 8 bits W : 16 bits D : 32 bits L : 64 bits | |
| Q | Relais de sortie | 64KMot | Pas enregistrer | Non | ||
| M | Sortie auxiliaire | 256KMot | Sauvegarder | Oui | ||
| Rétention du programme méthode au pouvoir échec |
Rétention par le flash interne | |||||
| Mode interruption | Le signal DI haute vitesse du module CPU peut être défini comme entrée d'interruption, permettant jusqu'à huit points d'entrée, et les modes d'interruption de front montant et de front descendant peuvent être définis. | |||||
Spécifications d'E/S à grande vitesse
Spécifications d'entrée à grande vitesse
| Article | Spécifcations | |
| Nom du signal | Entrée différentielle à grande vitesse | Entrée à une extrémité à grande vitesse |
| Entrée nominale voltage |
2.5V | 24VDC (-15% — +20%, pulsé dans les 5 %) |
| Entrée nominale actuel |
6.8 mA | 5.7 mA (valeur typique) (à 24 V CC) |
| Courant ON | / | Moins de 2 mA |
| OFF courant | / | Moins de 1 mA |
| Résistance d'entrée | 5400 | 2.2k0 |
| Max. compte vitesse |
800K impulsions/s (fréquence quadruple 2PH), 200kHz (un seul canal d'entrée) | |
| Service d'entrée 2PH rapport |
40%. 60% | |
| Borne commune | / | Un terminal commun est utilisé. |
Spécifications de sortie à grande vitesse
| Article | Caractéristiques |
| Nom du signal | Sortie (YO—Y7) |
| Polarité de sortie | AX7 AX7 |
| Volume du circuit de commandetage | 5 V-24 V CC |
| Courant de charge nominal | 100 mA/point, 1A/COM |
| Max. volumetage goutte à ON | 0.2 V (valeur typique) |
| Courant de fuite à OFF | Moins de 0.1 mA |
| Fréquence de sortie | 200kHz (La sortie de 200kHz nécessite que la charge équivalente connectée en externe soit supérieure à 12mA.) |
| Borne commune | Tous les huit points utilisent un terminal commun. |
Note:
- Les ports d'E/S à grande vitesse ont des restrictions sur la fréquence autorisée. Si la fréquence d'entrée ou de sortie dépasse la valeur autorisée, le contrôle et l'identification peuvent être anormaux. Disposez correctement les ports d'E/S.
- L'interface d'entrée différentielle à grande vitesse n'accepte pas le niveau d'entrée de pression différentielle supérieur à 7V. Sinon, le circuit d'entrée peut être endommagé.
Introduction et téléchargement du logiciel de programmation
Présentation du logiciel de programmation
INVTMATIC Studio est un logiciel de programmation d'automates programmables développé par INVT. Il fournit un environnement de développement de programmation ouvert et entièrement intégré avec une technologie avancée et des fonctions puissantes pour le développement de projets basés sur des langages de programmation conformes à la norme CEI 61131-3. Il est largement utilisé dans les secteurs de l'énergie, des transports, des municipalités, de la métallurgie, de la chimie, de la pharmacie, de l'alimentation, du textile, de l'emballage, de l'impression, du caoutchouc et des plastiques, des machines-outils et des industries similaires.
Environnement d'exécution et téléchargement
Vous pouvez installer Invtmatic Studio sur un ordinateur de bureau ou portable, dont le système d'exploitation est au moins Windows 7, l'espace mémoire est d'au moins 2 Go, l'espace matériel libre est d'au moins 10 Go et la fréquence principale du processeur est supérieure à 2 GHz. Ensuite, vous pouvez connecter votre ordinateur au module CPU de l'automate programmable via un câble réseau et éditer les programmes utilisateur via le logiciel Invtmatic Studio afin de pouvoir télécharger et déboguer les programmes utilisateur.
Instance de programmation
Ce qui suit décrit comment effectuer la programmation à l'aide d'un example (AX72-C-1608N).
Tout d'abord, connectez tous les modules matériels de l'automate programmable, y compris la connexion de l'alimentation au module CPU, la connexion du module CPU à l'ordinateur sur lequel Invtmatic Studio a été installé et au module d'extension requis, et la connexion du bus EtherCAT à la motorisation. Démarrez Invtmatic Studio pour créer un projet et effectuer la configuration de la programmation.
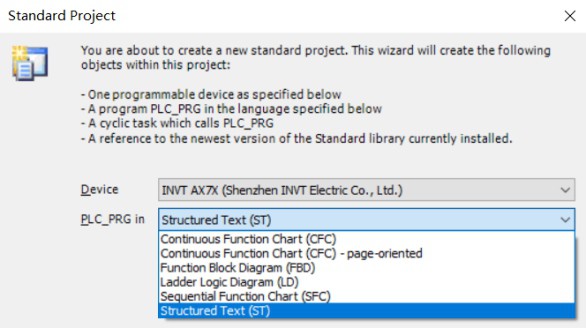
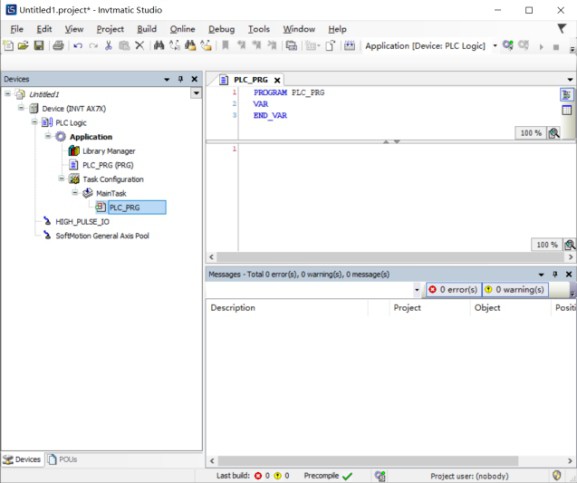
La procédure est la suivante :
Étape 1 Choisissez File > Nouveau projet, sélectionnez le type de projet standard et définissez l'emplacement et le nom d'enregistrement du projet. Cliquez sur OK. Sélectionnez ensuite l'appareil INVT AX7X et le langage de programmation de texte structuré (ST) dans la fenêtre de configuration de projet standard qui s'affiche. L'interface de configuration et de programmation CODESYS apparaît.
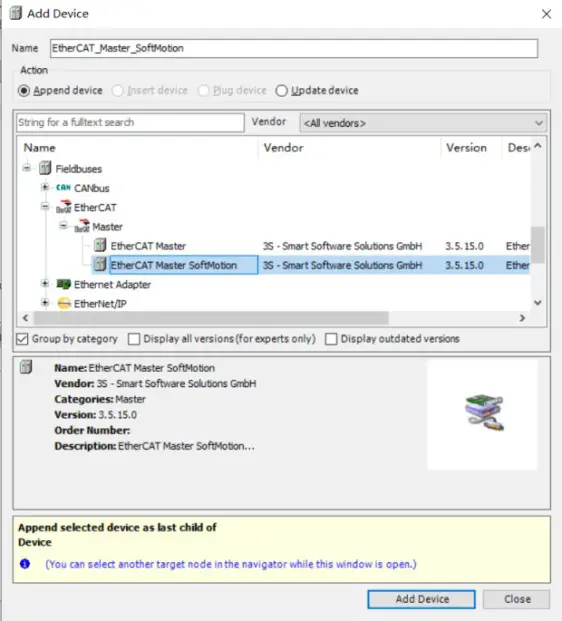
Étape 2 Cliquez avec le bouton droit sur l'arborescence de navigation des appareils. Choisissez ensuite Ajouter un appareil. Choisissez Ether CAT Master Soft Motion.
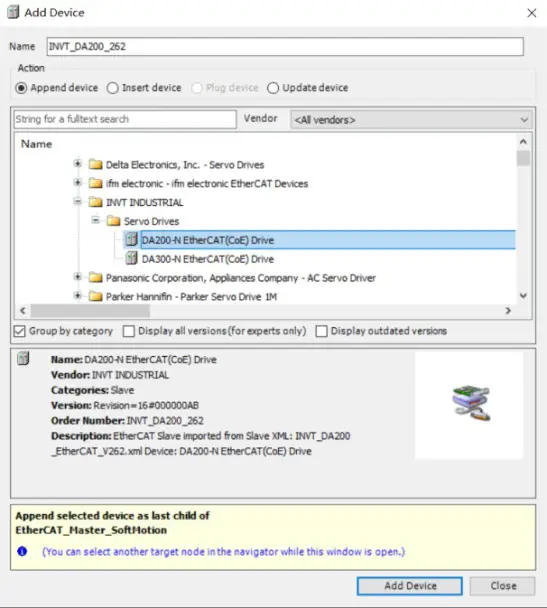
Étape 3 Faites un clic droit EtherCAT_Master_SoftMotion dans l'arborescence de navigation de gauche. Choisissez Ajouter un appareil. Choisissez DA200-N Ether CAT(CoE) Drive dans la fenêtre qui apparaît.
Étape 4 Choisissez Ajouter un axe SoftMotion CiA402 dans le menu contextuel qui s'affiche.
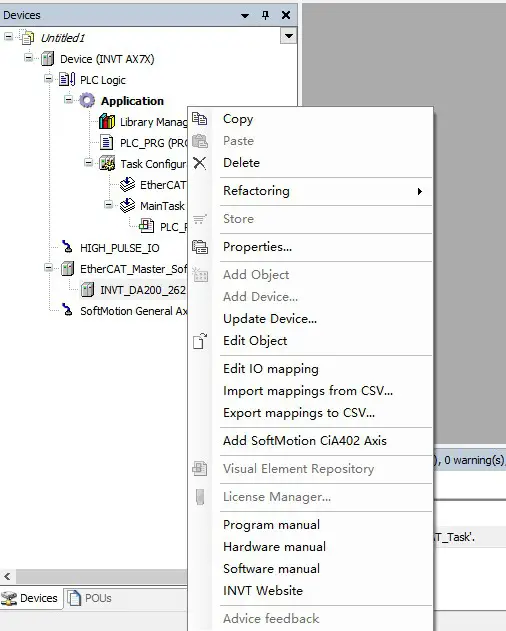
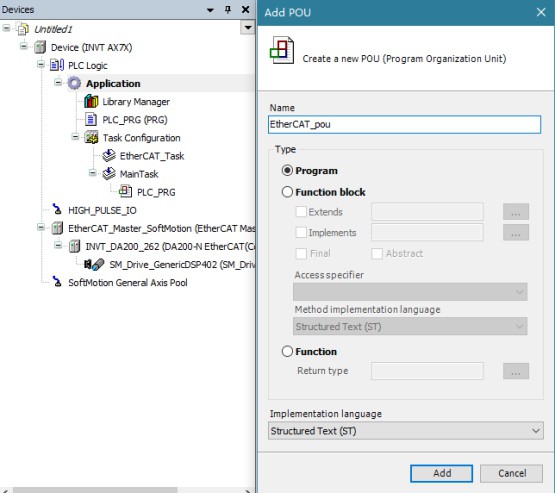
Étape 5 Cliquez avec le bouton droit sur Application dans l'arborescence de navigation de gauche et choisissez d'ajouter un POU EtherCAT. Double-cliquez sur la tâche EtherCAT_Task générée automatiquement pour l'appeler. Choisissez l'EtherCAT_pou créé. Écrivez le programme d'application en fonction du processus de contrôle d'application.
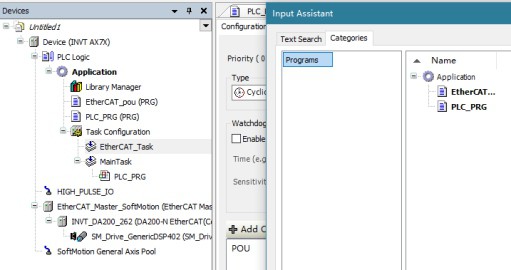
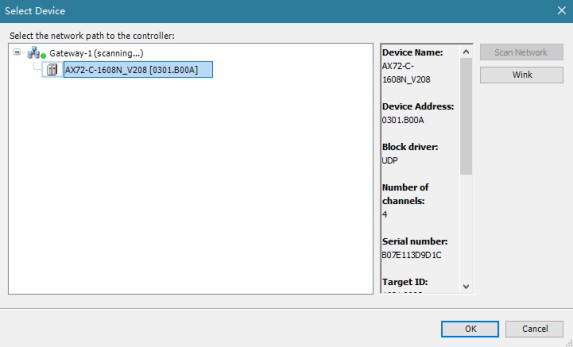
Étape 6 Double-cliquez sur l'arborescence de navigation Périphérique, cliquez sur Analyser le réseau, choisissez AX72-C-1608N illustré dans la figure suivante, puis cliquez sur Clin d'œil. Cliquez ensuite sur OK lorsque
l'indicateur de système CPU clignote.
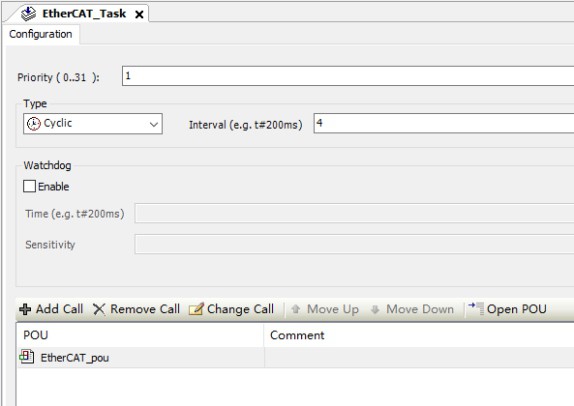
Étape 7 Double-cliquez sur EtherCAT_Task sous Task Configuration dans le volet de gauche. Définissez les priorités des tâches et les intervalles d'exécution en fonction des exigences en temps réel des tâches.
Dans Invtmatic Studio, vous pouvez cliquer sur ![]() pour compiler des programmes, et vous pouvez vérifier les erreurs en fonction des journaux. Après avoir confirmé que la compilation est entièrement correcte, vous pouvez cliquer sur
pour compiler des programmes, et vous pouvez vérifier les erreurs en fonction des journaux. Après avoir confirmé que la compilation est entièrement correcte, vous pouvez cliquer sur ![]() pour vous connecter et télécharger des programmes utilisateur sur l'automate programmable et vous pouvez effectuer un débogage de simulation.
pour vous connecter et télécharger des programmes utilisateur sur l'automate programmable et vous pouvez effectuer un débogage de simulation.
Vérification avant démarrage et maintenance préventive
Vérification avant démarrage
Si vous avez terminé le câblage, assurez-vous de ce qui suit avant de mettre le module en marche :
- Les câbles de sortie du module répondent aux exigences.
- Les interfaces d'extension à tous les niveaux sont connectées de manière fiable.
- Les programmes d'application utilisent les méthodes de fonctionnement et les réglages de paramètres corrects.
Maintenance préventive
Effectuez la maintenance préventive comme suit :
- Nettoyez régulièrement le contrôleur programmable, évitez que des corps étrangers ne tombent dans le contrôleur et assurez de bonnes conditions de ventilation et de dissipation de la chaleur pour le contrôleur.
- Formuler des instructions de maintenance et tester régulièrement le contrôleur.
- Vérifiez régulièrement le câblage et les bornes pour vous assurer qu'ils sont bien fixés.
Informations complémentaires
N'hésitez pas à nous contacter pour plus d'informations. Veuillez fournir le modèle et le numéro de série du produit lors de la demande.
Pour obtenir des informations sur les produits ou services associés, vous pouvez :
- Contactez le bureau local de l'INVT.
- Visite www.invt.com.
- Scannez le code QR suivant.

Centre de service client, Shenzhen INVT Electric Co., Ltd.
Adresse : INVT Guangming Technology Building, Songbai Road, Matian, Guangming District, Shenzhen, Chine
Droits d'auteur © INVT. Tous les droits sont réservés. Les informations du manuel peuvent être sujettes à modification sans préavis.

202207 (V1.0)
Documents / Ressources
 |
invt Module CPU série AX7 [pdf] Manuel d'instructions Module CPU série AX7, Série AX7, Module CPU, Module |



