![]()
AX7 ![]() Instrukcja obsługi modułu CPU serii
Instrukcja obsługi modułu CPU serii
Moduł procesora serii AX7
Dziękujemy za wybór sterownika programowalnego serii AX (w skrócie sterownik programowalny).
Programowalny sterownik oparty na platformie Invtmatic Studio w pełni obsługuje systemy programowania IEC61131-3, magistralę polową czasu rzeczywistego EtherCAT, magistralę polową CANopen i porty dużej prędkości, a także oferuje funkcje krzywki elektronicznej, przekładni elektronicznej i interpolacji.
W instrukcji opisano głównie specyfikacje, funkcje, okablowanie i metody użytkowania modułu CPU programowalnego sterownika. Aby mieć pewność, że używasz produktu bezpiecznie i prawidłowo oraz w pełni go wykorzystasz, przeczytaj instrukcję uważnie przed instalacją. Aby uzyskać szczegółowe informacje na temat środowisk programistycznych i metod projektowania programów użytkownika, zapoznaj się z podręcznikiem użytkownika sprzętu programowalnego sterownika serii AX oraz podręcznikiem użytkownika oprogramowania programowalnego sterownika serii AX, które wydajemy.
Instrukcja może ulec zmianie bez wcześniejszego powiadomienia. Proszę odwiedź http://www.invt.com aby pobrać najnowszą wersję instrukcji.
Środki ostrożności
Ostrzeżenie
| Symbol | Nazwa | Opis | Skrót |
| Niebezpieczeństwo |
Niebezpieczeństwo | Nieprzestrzeganie odpowiednich wymagań może spowodować poważne obrażenia ciała lub nawet śmierć. | |
| Ostrzeżenie |
Ostrzeżenie | Nieprzestrzeganie odpowiednich wymagań może spowodować obrażenia ciała lub uszkodzenie sprzętu. |
Dostawa i montaż
| • Tylko przeszkoleni i wykwalifikowani specjaliści mogą przeprowadzać instalację, okablowanie, konserwację i kontrolę. • Nie instaluj sterownika programowalnego na materiałach łatwopalnych. Ponadto należy chronić sterownik programowalny przed kontaktem lub przyleganiem do materiałów łatwopalnych. • Zainstalować sterownik programowalny w zamykanej szafie sterowniczej o stopniu ochrony co najmniej IP20, co zapobiega przypadkowemu dotknięciu przez osoby nieposiadające wiedzy w zakresie urządzeń elektrycznych, gdyż pomyłka może spowodować uszkodzenie sprzętu lub porażenie prądem. Szafę sterowniczą może obsługiwać wyłącznie personel, który przeszedł odpowiednie szkolenie z zakresu elektryki i obsługi sprzętu. • Nie uruchamiaj sterownika programowalnego, jeśli jest uszkodzony lub niekompletny. • Nie stykać się ze sterownikiem programowalnym za pomocą damp przedmiotów lub części ciała. W przeciwnym razie może dojść do porażenia prądem. |
Wybór kabla
| • Tylko przeszkoleni i wykwalifikowani specjaliści mogą przeprowadzać instalację, okablowanie, konserwację i kontrolę. • W pełni zapoznaj się z typami interfejsów, specyfikacjami i związanymi z nimi wymaganiami przed okablowaniem. W przeciwnym razie spowoduje to nieprawidłowe okablowanie nienormalne bieganie. • Odciąć wszystkie źródła zasilania podłączone do sterownika programowalnego przed wykonaniem okablowania. • Przed włączeniem zasilania w celu uruchomienia należy upewnić się, że każda osłona zacisków modułu jest prawidłowo zainstalowana na swoim miejscu po zakończeniu instalacji i okablowania. Zapobiega to dotknięciu zacisku pod napięciem. W przeciwnym razie może dojść do obrażeń ciała, awarii sprzętu lub awarii. • Zainstaluj odpowiednie komponenty lub urządzenia zabezpieczające podczas korzystania z zewnętrznych zasilaczy dla programowalnego sterownika. Zapobiega to uszkodzeniu programowalnego sterownika z powodu usterek zewnętrznego zasilacza, przepięćtage, przetężenie lub inne wyjątki. |
Uruchomienie i uruchomienie
| • Przed włączeniem zasilania należy upewnić się, że środowisko pracy sterownika programowalnego spełnia wymagania, okablowanie jest prawidłowe, specyfikacje zasilania wejściowego spełniają wymagania oraz że obwód zabezpieczający został zaprojektowany w celu ochrony sterownika programowalnego, tak aby programowalny sterownik może działać bezpiecznie nawet w przypadku awarii urządzenia zewnętrznego. • W przypadku modułów lub terminali wymagających zewnętrznego zasilania należy skonfigurować zewnętrzne urządzenia zabezpieczające, takie jak bezpieczniki lub wyłączniki automatyczne, aby zapobiec uszkodzeniom spowodowanym przez zewnętrzne zasilanie lub usterki urządzenia. |
Konserwacja i wymiana podzespołów
| • Tylko przeszkoleni i wykwalifikowani profesjonaliści mogą przeprowadzać konserwację, przeglądy i wymianę części urządzenia programowalny sterownik. • Odciąć wszystkie źródła zasilania podłączone do sterownika programowalnego przed okablowaniem zacisków. • Podczas konserwacji i wymiany komponentów należy podjąć środki zapobiegające wpadnięciu śrub, kabli i innych materiałów przewodzących do wnętrza sterownika programowalnego. |
Sprzedaż
| Sterownik programowalny zawiera metale ciężkie. Utylizować zużyty sterownik programowalny jako odpad przemysłowy. | |
| Zutylizuj odpady oddzielnie w odpowiednim punkcie zbiórki, ale nie umieszczaj ich w normalnym strumieniu odpadów. |
Wprowadzenie do produktu
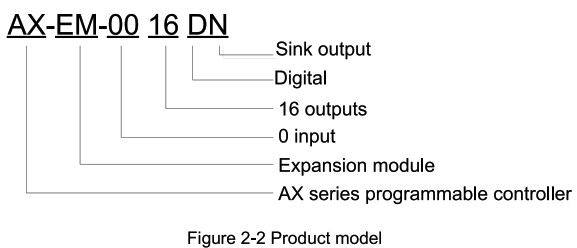
Model i tabliczka znamionowa
Funkcja ponadview
Jako główny moduł sterujący sterownika programowalnego, moduł CPU [AX7J-C-1608L] (w skrócie moduł CPU) ma następujące funkcje:
- Realizuje kontrolę, monitorowanie, przetwarzanie danych i komunikację sieciową w celu zapewnienia działania systemu.
- Obsługuje języki programowania IL, ST, FBD, LD, CFC i SFC zgodne ze standardami IEC61131-3 dzięki wykorzystaniu platformy Invtmatic Studio, którą INVT uruchomiło do programowania.
- Obsługuje 16 lokalnych modułów rozszerzeń (takich jak moduły I/O, temperatury i moduły analogowe).
- Wykorzystuje otwartą magistralę Ether CAT lub CAN do podłączania modułów podrzędnych, z których każdy obsługuje 16 modułów rozszerzeń (takich jak moduły I/O, temperatury i moduły analogowe).
- Obsługuje protokół Modbus TCP master/slave.
- Integruje dwa interfejsy RS485, obsługując protokół Modbus RTU master/slave.
- Obsługuje szybkie wejścia/wyjścia, 16 szybkich wejść i 8 szybkich wyjść.
- Obsługuje sterowanie ruchem za pomocą magistrali EtherCAT z czasem synchronizacji 1 ms, 2 ms, 4 ms lub 8 ms.
- Obsługuje impulsowe sterowanie ruchem jedno- lub wieloosiowym, w tym 2-4-osiową interpolację liniową i 2-osiową interpolację łukową.
- Obsługuje zegar czasu rzeczywistego.
- Zapewnia ochronę danych na wypadek zaniku zasilania.
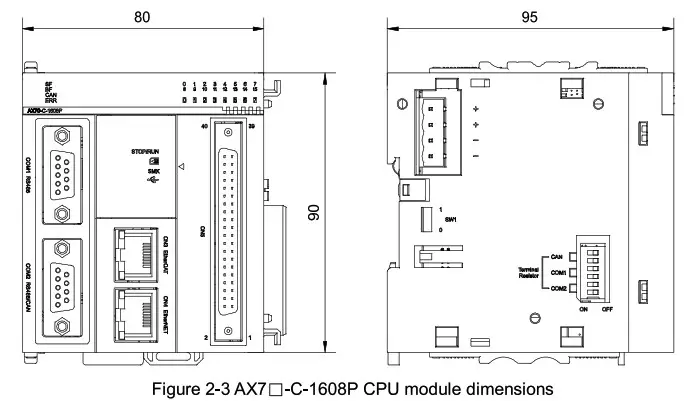
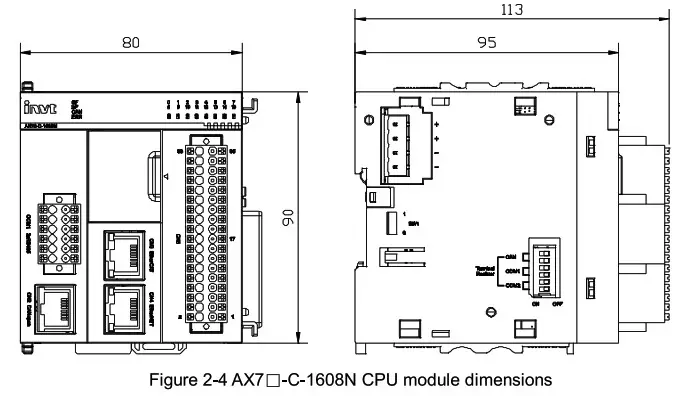
Wymiary konstrukcyjne
Wymiary konstrukcyjne (jednostka: mm) pokazano na poniższym rysunku.
Interfejs
Opis interfejsu
Dystrybucja interfejsów
Rysunek 3-1 i Rysunek 3-2 przedstawiają dystrybucję interfejsu modułu CPU. Dla każdego interfejsu w pobliżu znajduje się odpowiedni opis sitodrukowy, który ułatwia okablowanie, obsługę i sprawdzanie.
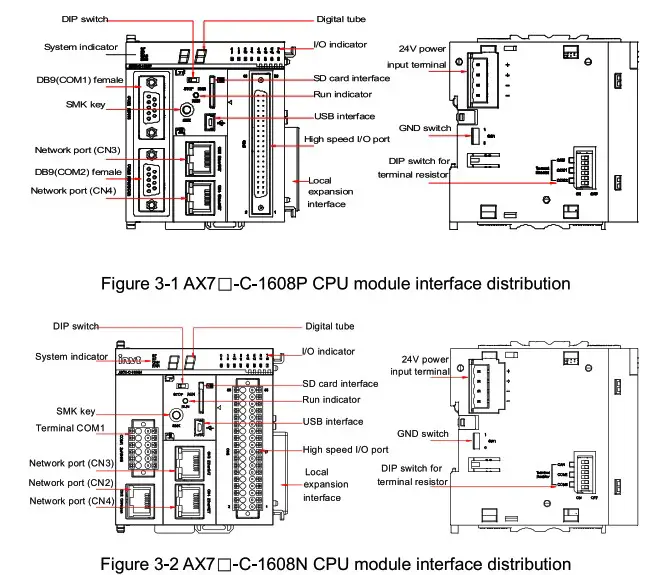
| Interfejs | Funkcjonować | |
| Przełącznik DIP | Przełącznik DIP RUN/STOP. | |
| Wskaźnik systemu | SF: Wskaźnik awarii systemu. BF: Wskaźnik awarii magistrali. CAN: Wskaźnik usterki magistrali CAN. ERR: Wskaźnik usterki modułu. |
|
| Klucz SMK | Inteligentny klucz SMK. | |
| WO-C-1608P | COM1 (DB9) kobieta |
Jeden interfejs RS485, obsługujący Modbus RTU protokół master/slave. |
| COM2 (DB9) kobieta |
Jeden interfejs RS485 i drugi interfejs CAN Interfejs RS485 obsługuje protokół Modbus RTU master/slave, a drugi interfejs CAN obsługuje protokół CANopen master/slave. |
|
| AX70-C-1608N | COM1 i COM2 (zacisk wtykowy n) | Dwa interfejsy RS485 obsługujące protokół Modbus RTU protokół master/slave. |
| CN2 (RJ45) | Interfejs CAN, obsługujący protokół CAN open master/slave. | |
| CN3 (RJ45) | Interfejs eterowy CAT | |
| CN4 (RJ45) | 1. Protokół Modbus TCP 2.Standardowe funkcje Ethernetu 3. Pobieranie i debugowanie programu użytkownika (tylko z IPv4) |
|
| Tuba cyfrowa | Wyświetla alarmy i odpowiedzi na naciśnięcie klawisza SMK. | |
| Wskaźnik wejścia/wyjścia | Określa, czy sygnały 16 wejść i 8 wyjść są prawidłowe. | |
| Interfejs karty SD | Służy do przechowywania programów użytkownika i danych. | |
| Wskaźnik uruchomienia | Wskazuje, czy moduł CPU jest uruchomiony. | |
| Interfejs USB | Służy do pobierania i debugowania programów. | |
| Szybkie wejścia/wyjścia | 16 szybkich wejść i 8 szybkich wyjść. | |
| Lokalny interfejs rozszerzający | Obsługuje rozbudowę do 16 modułów I/O, uniemożliwiając wymianę modułów na gorąco. | |
| Interfejs zasilania 24 V | DC 24V objtage wejście | |
| Przełącznik uziemiający | Przełącznik połączenia między wewnętrznym cyfrowym uziemieniem systemu a uziemieniem obudowy. Jest on domyślnie odłączony (SW1 jest ustawiony na 0). Jest używany tylko w szczególnych scenariuszach, w których wewnętrzne cyfrowe uziemienie systemu jest traktowane jako płaszczyzna odniesienia. Należy zachować ostrożność przed jego użyciem. W przeciwnym razie stabilność systemu zostanie naruszona. | |
| Przełącznik DIP rezystora końcowego | ON wskazuje na podłączenie rezystora końcowego (domyślnie jest wyłączone). COM1 odpowiada RS485-1, COM2 odpowiada RS485-2, a CAN odpowiada CAN. | |
Klucz SMK
Klucz SMK jest używany głównie do resetowania adresu IP modułu CPU (rP) i czyszczenia programów aplikacji (cA). Domyślny adres modułu CPU to 192.168.1.10. Jeśli chcesz przywrócić domyślny adres ze zmodyfikowanego adresu IP, możesz przywrócić domyślny adres za pomocą klucza SMK. Metoda jest następująca:
- Ustaw moduł CPU w stanie STOP. Naciśnij klawisz SMK. Gdy na wyświetlaczu cyfrowym pojawi się „rP”, naciśnij i przytrzymaj klawisz SMK. Następnie na wyświetlaczu cyfrowym pojawi się „rP” i naprzemiennie wyłączy się, wskazując, że wykonywany jest reset adresu IP. Operacja resetowania zakończy się powodzeniem, gdy wyświetlacz cyfrowy będzie stale wyłączony. Jeśli w tym momencie zwolnisz klawisz SMK, wyświetlacz cyfrowy wyświetli „rP”. Naciśnij i przytrzymaj klawisz SMK, aż wyświetlacz wyświetli „00” (rP—cA—rU-rP).
- Jeżeli zwolnisz klawisz SMK podczas wyświetlania przez wyświetlacz cyfrowy komunikatu „rP” i wyłączania, operacja resetowania adresu IP zostanie anulowana, a wyświetlacz cyfrowy wyświetli komunikat „rP”.
Aby usunąć program z modułu CPU, wykonaj następujące czynności:
Naciśnij klawisz SMK. Gdy na wyświetlaczu cyfrowym pojawi się „cA”, naciśnij i przytrzymaj klawisz SMK. Następnie na wyświetlaczu cyfrowym pojawi się „rP” i naprzemiennie wyłączy się, wskazując, że program jest czyszczony. Gdy wyświetlacz cyfrowy będzie stale wyłączony, uruchom ponownie moduł CPU. Program zostanie pomyślnie wyczyszczony.
Opis lampy cyfrowej
- Jeżeli po pobraniu programy nie wykazują błędów, na wyświetlaczu modułu CPU stale wyświetla się „00”.
- Jeżeli w programie występuje błąd, na wyświetlaczu cyfrowym miga informacja o błędzie.
- Na przykładample, jeśli wystąpi tylko błąd 19, lampa cyfrowa wyświetla „19” i wyłącza się naprzemiennie. Jeśli błąd 19 i błąd 29 wystąpią jednocześnie, lampa cyfrowa wyświetla „19”, wyłącza się, wyświetla „29” i wyłącza się naprzemiennie. Jeśli wystąpi więcej błędów jednocześnie, sposób wyświetlania jest podobny.
Definicja terminala
AX7![]() -C-1608P Definicja terminala komunikacyjnego COM1/COM2
-C-1608P Definicja terminala komunikacyjnego COM1/COM2
W przypadku modułu CPU AX7LJ-C-1608P COM1 to terminal komunikacyjny RS485, a COM2 to terminal komunikacyjny RS485/CAN, oba wykorzystują złącze DB9 do transmisji danych. Interfejsy i piny opisano poniżej.
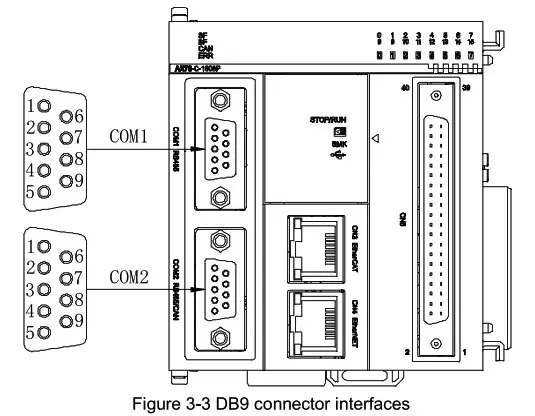
Tabela 3-1 Piny złącza COM1/COM2 DB39
| Interfejs | Dystrybucja | Szpilka | Definicja | Funkcjonować |
| COM1 (RS485) |
1 | / | / | |
| 2 | / | / | ||
| 3 | / | / | ||
| 4 | RS485A | Sygnał różnicowy RS485 + | ||
| 5 | RS485B | Sygnał różnicowy RS485 – | ||
| 6 | / | / | ||
| 7 | / | / | ||
| 8 | / | / | ||
| 9 | GND_RS485 | Masa zasilania RS485 | ||
| COM2 (RS485/CAN) |
1 | / | / | |
| 2 | CZY MOGĘ | Sygnał różnicowy CAN – | ||
| 3 | / | / | ||
| 4 | RS485A | Sygnał różnicowy RS485 + | ||
| 5 | RS485B | Sygnał różnicowy RS485 – | ||
| 6 | GND_CAN | CAN zasilanie uziemienie | ||
| 7 | MOŻE_H | Sygnał różnicowy CAN + | ||
| 8 | / | / | ||
| 9 | GND_RS485 | Masa zasilania RS485 |
AX7![]() -Definicja terminala szybkiego wejścia/wyjścia C-1608P
-Definicja terminala szybkiego wejścia/wyjścia C-1608P
AX7![]() -Moduł CPU C-1608P ma 16 szybkich wejść i 8 szybkich wyjść. Interfejsy i piny są opisane poniżej.
-Moduł CPU C-1608P ma 16 szybkich wejść i 8 szybkich wyjść. Interfejsy i piny są opisane poniżej.
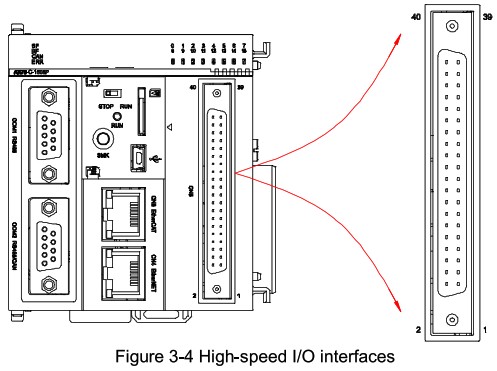
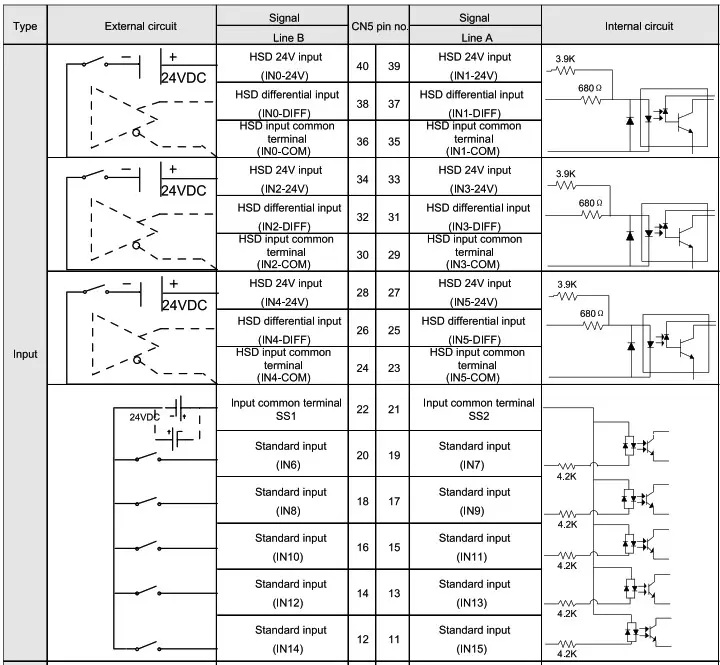
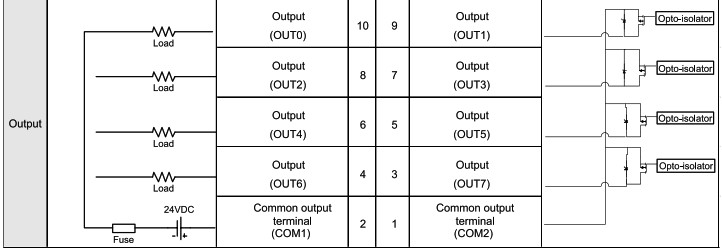
Tabela 3-2 Piny szybkiego wejścia/wyjścia
AX7![]() -C-1608N Definicja terminala komunikacyjnego COM1/CN2
-C-1608N Definicja terminala komunikacyjnego COM1/CN2
Dla AX7![]() -C-1608N Moduł CPU, COM1 to dwukanałowy terminal komunikacyjny RS485, wykorzystujący 12-pinowe złącze wtykowe do transmisji danych. CN2 to terminal komunikacyjny CAN, wykorzystujący złącze RJ45 do transmisji danych. Interfejsy i piny są opisane poniżej.
-C-1608N Moduł CPU, COM1 to dwukanałowy terminal komunikacyjny RS485, wykorzystujący 12-pinowe złącze wtykowe do transmisji danych. CN2 to terminal komunikacyjny CAN, wykorzystujący złącze RJ45 do transmisji danych. Interfejsy i piny są opisane poniżej.

Tabela 3-3 Piny złącza COM1/CN2
| Funkcje zacisku push-in COM1 | ||||
| Definicja | Funkcjonować | Szpilka | ||
| COM1RS485 | A | Sygnał różnicowy RS485 + |
12 | |
| B | Sygnał różnicowy RS485 – | 10 | ||
| GND | RS485 _1 moc układu grunt |
8 | ||
| PE | Tarcza ziemi | 6 | ||
| COM2RS485 | A | Sygnał różnicowy RS485 + |
11 | |
| B | Sygnał różnicowy RS485 – | 9 | ||
| GND | Zasilanie układu RS485_2 grunt |
7 | ||
| PE | Tarcza ziemi | 5 | ||
| Uwaga: Piny 1-4 nie są używane. | ||||
| Funkcje pinów CN2 | ||||
| Definicja | Funkcjonować | Szpilka | ||
| Mogę otworzyć | GND | CAN zasilanie uziemienie | 1 | |
| CZY MOGĘ | Sygnał różnicowy CAN – | 7 | ||
| CAN_H | Sygnał różnicowy CAN + | 8 | ||
| Uwaga: Piny 2-6 nie są używane. | ||||
AX7![]() -Definicja terminala szybkiego wejścia/wyjścia C-1608N
-Definicja terminala szybkiego wejścia/wyjścia C-1608N
AX7![]() Moduł CPU 1-C-1608N ma 16 szybkich wejść i 8 szybkich wyjść. Na poniższym rysunku pokazano rozkład zacisków, a poniższa tabela zawiera listę pinów.
Moduł CPU 1-C-1608N ma 16 szybkich wejść i 8 szybkich wyjść. Na poniższym rysunku pokazano rozkład zacisków, a poniższa tabela zawiera listę pinów.
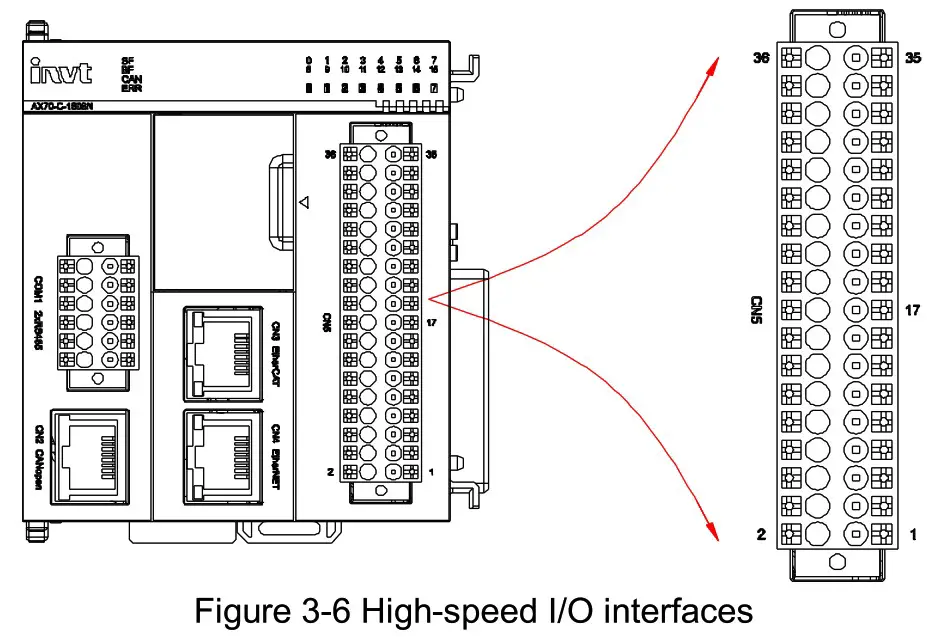
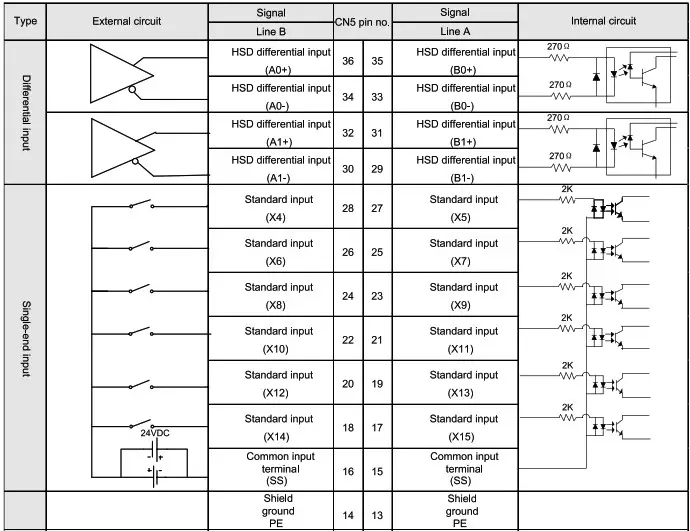
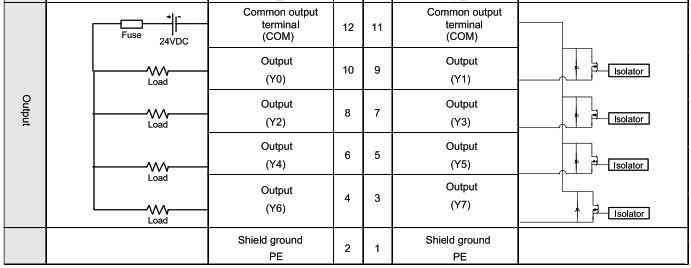
Tabela 3-4 Piny szybkiego wejścia/wyjścia
Notatka:
- Wszystkie 16 kanałów wejściowych AX7
 Moduł procesora -C-1608P umożliwia szybką transmisję danych, ale pierwsze 6 kanałów obsługuje wejście pojedyncze lub różnicowe 24 V, a ostatnie 10 kanałów obsługuje wejście pojedyncze 24 V.
Moduł procesora -C-1608P umożliwia szybką transmisję danych, ale pierwsze 6 kanałów obsługuje wejście pojedyncze lub różnicowe 24 V, a ostatnie 10 kanałów obsługuje wejście pojedyncze 24 V. - Wszystkie 16 kanałów wejściowych AX7Moduł CPU C-1608N pozwala na szybką transmisję danych, ale pierwsze 4 kanały obsługują wejście różnicowe, a ostatnie 12 kanałów obsługuje pojedyncze wejście 24 V.
- Każdy punkt wejścia/wyjścia jest odizolowany od obwodu wewnętrznego.
- Całkowita długość kabla połączeniowego portu I/O dużej prędkości nie może przekraczać 3 metrów.
- Nie zginaj kabli podczas ich mocowania.
- Podczas układania kabli oddziel kable połączeniowe od kabli dużej mocy, które powodują silne zakłócenia, ale nie wiąż kabli połączeniowych z tymi ostatnimi. Ponadto unikaj układania równoległego na duże odległości.
Instalacja modułu
Dzięki modułowej konstrukcji programowalny sterownik jest łatwy w instalacji i konserwacji. Jeśli chodzi o moduł CPU, głównymi obiektami połączeń są zasilacz i moduły rozszerzeń.
Moduły są łączone za pomocą dostarczonych z modułem interfejsów połączeniowych i połączeń zatrzaskowych.
Procedura montażu jest następująca:
| Krok 1 Przesuń zatrzask na module procesora w kierunku pokazanym na poniższym rysunku (używając modułu zasilania) połączenie dla example). |
Krok 2 Wyrównaj moduł procesora ze złączem modułu zasilania, aby zapewnić wzajemne zablokowanie. |
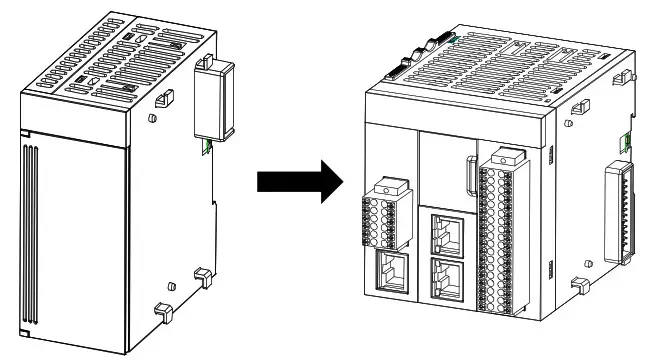 |
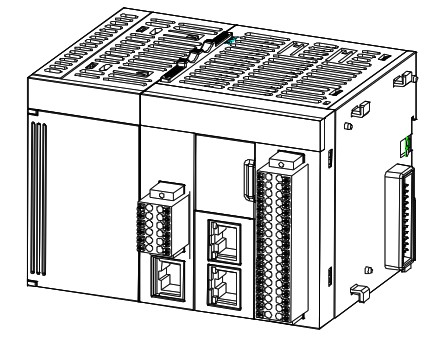 |
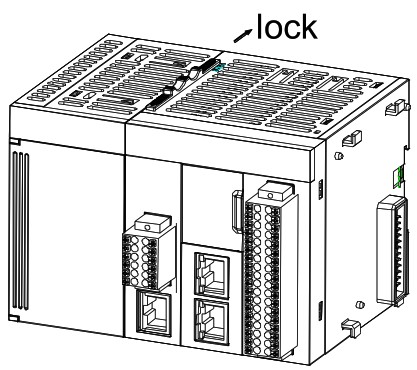
| Krok 3 Przesuń zatrzask na module procesora w kierunku pokazanym na poniższym rysunku, aby połączyć i zablokować oba moduły. | Krok 4 Podobnie jak w przypadku montażu na standardowej szynie DIN, zaczep odpowiedni moduł na standardowej szynie montażowej, aż zatrzask zatrzaśnie się na swoim miejscu. |
 |
 |
Podłączenie kabla i specyfikacje
Połączenie magistrali Ether CAT
Specyfikacje magistrali Ether CAT
| Przedmiot | Opis |
| Protokół komunikacyjny | Eterowy kot |
| Obsługiwana usługa | COE (PDO/SDO) |
| Minimalny interwał synchronizacji | 1ms/4 osie (wartość typowa) |
| Metoda synchronizacji | DC do synchronizacji/DC nieużywane |
| Warstwa fizyczna | 100BASE-TX |
| Tryb dwustronny | Pełny dupleks |
| Struktura topologii | Połączenie szeregowe |
| Medium transmisyjne | Kabel sieciowy (patrz rozdział „Dobór kabla”) |
| Odległość transmisji | Mniej niż 100 m między dwoma węzłami |
| Liczba węzłów podrzędnych | Do 125 |
| Długość ramki Ether CAT | 44 bajty-1498 bajtów |
| Przetwarzać dane | Do 1486 bajtów w jednej ramce |
Wybór kabla
Moduł CPU może implementować komunikację magistrali Ether CAT przez port CN3. Zalecane są standardowe kable INVT. Jeśli wykonujesz kable komunikacyjne samodzielnie, upewnij się, że spełniają one następujące wymagania:
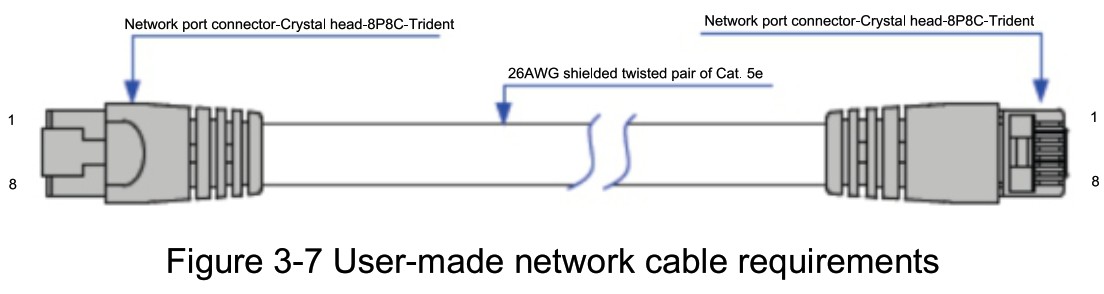
Notatka:
- Używane przez Ciebie kable komunikacyjne muszą przejść test przewodności w 100%, bez zwarć, przerw, przemieszczeń lub słabego styku.
- Aby zagwarantować odpowiednią jakość komunikacji, długość kabla komunikacyjnego EtherCAT nie może przekraczać 100 metrów.
- Zaleca się wykonanie kabli komunikacyjnych przy użyciu ekranowanych przewodów skrętkowych kategorii 5e zgodnych z normami EIA/TIA568A, EN50173, ISO/IEC11801, biuletynem EIA/TIA TSB oraz EIA/TIA SB40-A i TSB36.
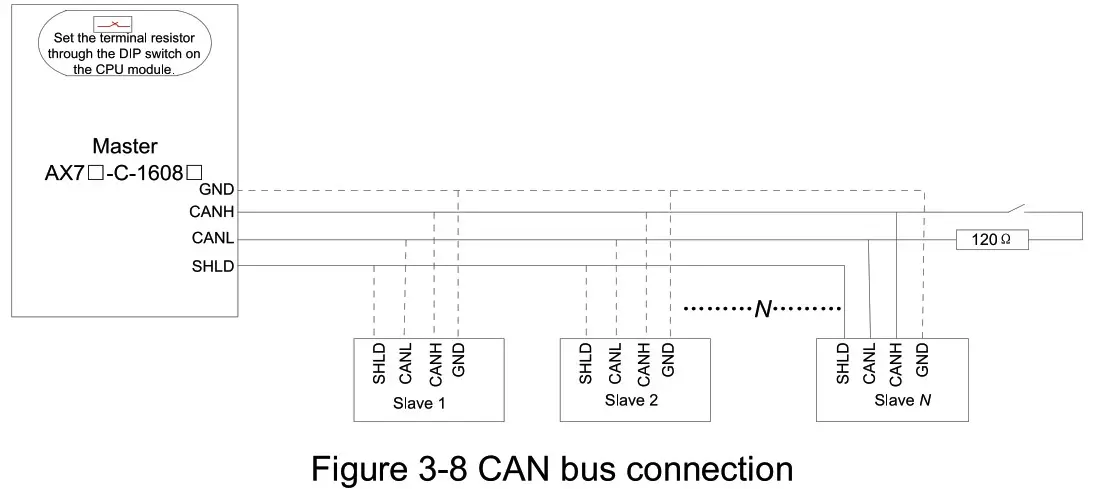
Połączenie kablowe CAN open
Sieciowanie
Struktura topologii połączenia magistrali CAN jest pokazana na poniższym rysunku. Zaleca się używanie ekranowanej skrętki do połączenia magistrali CAN. Każdy koniec magistrali CAN jest podłączony do rezystora zaciskowego 1200, aby zapobiec odbiciu sygnału. W większości przypadków warstwa ekranu wykorzystuje uziemienie jednopunktowe.
Wybór kabla
- Dla AX7-Moduł CPU C-1608P, ten sam terminal jest używany zarówno do komunikacji CANopen, jak i komunikacji RS485, używając złącza DB9 do transmisji danych. Piny w złączu DB9 zostały opisane wcześniej.
- Dla AX7Moduł CPU 1-C-1608N, terminal RJ45 służy do komunikacji CANopen w celu transmisji danych. Piny w złączu RJ45 zostały opisane wcześniej.
Zalecane są standardowe kable INVT. Jeśli wykonujesz kable komunikacyjne samodzielnie, wykonuj je zgodnie z opisem pinów i upewnij się, że proces produkcyjny i parametry techniczne spełniają wymagania komunikacyjne.
Notatka:
- Aby zwiększyć odporność kabla na zakłócenia, podczas jego produkcji zaleca się stosowanie ekranowania z folii aluminiowej oraz oplotu aluminiowo-magnezowego.
- W przypadku kabli różnicowych należy stosować technikę uzwojenia skrętką.
Połączenie komunikacji szeregowej RS485
Moduł CPU obsługuje 2 kanały komunikacji RS485.
- Dla AX7-Moduł CPU C-1608P, porty COM1 i COM2 wykorzystują złącze DB9 do transmisji danych. Piny w złączu DB9 zostały opisane wcześniej.
- Dla AX7-Moduł CPU C-1608N, port wykorzystuje 12-pinowe złącze zaciskowe typu push-in do transmisji danych. Piny w złączu zaciskowym zostały opisane wcześniej.
Zalecane są standardowe kable INVT. Jeśli wykonujesz kable komunikacyjne samodzielnie, wykonuj je zgodnie z opisem pinów i upewnij się, że proces produkcyjny i parametry techniczne spełniają wymagania komunikacyjne.
Notatka:
- Aby zwiększyć odporność kabla na zakłócenia, podczas jego produkcji zaleca się stosowanie ekranowania z folii aluminiowej oraz oplotu aluminiowo-magnezowego.
- W przypadku kabli różnicowych należy stosować technikę uzwojenia skrętką.
Połączenie Ethernetowe
Sieciowanie
Port Ethernet modułu CPU to CN4, który umożliwia połączenie z innym urządzeniem, takim jak komputer lub urządzenie HMI, za pomocą kabla sieciowego w trybie punkt-punkt.
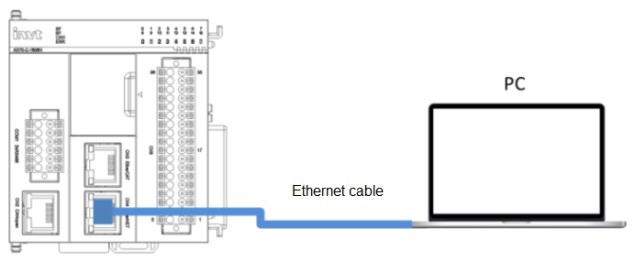
Rysunek 3-9 Połączenie Ethernet
Można również podłączyć port Ethernet do koncentratora lub przełącznika za pomocą kabla sieciowego, realizując w ten sposób połączenie wielopunktowe.

Rysunek 3-10Sieć Ethernet
Wybór kabla
Aby poprawić niezawodność komunikacji, użyj ekranowanych kabli skrętkowych kategorii 5 lub wyższej jako kabli Ethernet. Zalecane są standardowe kable INVT.
Instrukcje użytkowania
Parametry techniczne
Ogólne specyfikacje modułu CPU
| Przedmiot | Opis | |||||
| Objętość wejściowatage | 24 V prądu stałego | |||||
| Pobór mocy | < 15 W | |||||
| Brak energii czas ochrony |
300 ms (brak ochrony w ciągu 20 sekund od włączenia zasilania) | |||||
| Zapasowa bateria zegar czasu rzeczywistego |
Utrzymany | |||||
| Zasilanie magistrali backplane dostarczać |
5V/2.5A | |||||
| Metoda programowania | Języki programowania IEC 61131-3 (LD, FBD, IL, ST, SFC, i CFC) |
|||||
| Wykonanie programu metoda |
Lokalny online | |||||
| Pamięć programu użytkownika przestrzeń |
10MB | |||||
| Miejsce pamięci flash w przypadku awarii zasilania ochrona |
512 KB | |||||
| karta SD specyfikacje |
Karta microSD 32G | |||||
| Elementy miękkie i Charakterystyka |
||||||
| Element | Nazwa | Liczyć | Charakterystyka magazynowania | |||
| Domyślny | Można pisać | Opis | ||||
| I | Przekaźnik wejściowy | 64KSłów | Nie zapisz | NIE | X: 1 bit B. 8 bitów W: 16 bitów D: 32 bity L: 64 bity | |
| Q | Przekaźnik wyjściowy | 64KSłów | Nie zapisz | NIE | ||
| M | Wyjście pomocnicze | 256KSłów | Ratować | Tak | ||
| Utrzymanie programu metoda na potęgę awaria |
Retencja za pomocą wewnętrznej pamięci flash | |||||
| Tryb przerwania | Szybki sygnał DI modułu CPU można ustawić jako wejście przerwania, co pozwala na przyjęcie do ośmiu punktów wejściowych. Można także ustawić tryby przerwania zbocza narastającego i opadającego. | |||||
Specyfikacje szybkiego wejścia/wyjścia
Specyfikacje wejścia o dużej prędkości
| Przedmiot | Specyfiki | |
| Nazwa sygnału | Szybkie wejście różnicowe | Szybkie wejście jednostronne |
| Znamionowe wejście tomtage |
2.5 V | 24VDC (-15% — +20%, pulsujące w granicach 5%) |
| Znamionowe wejście aktualny |
6.8mA | 5.7 mA (wartość typowa) (przy 24 V DC) |
| Włączony prąd | / | Mniej niż 2mA |
| WYŁĄCZONY prąd | / | Mniej niż 1mA |
| Rezystancja wejściowa | 5400 | 2.2k0 |
| Maksymalna liczba prędkość |
800 tys. impulsów/s (częstotliwość czterokrotnie większa niż 2PH), 200 kHz (pojedynczy kanał wejściowy) | |
| 2PH wejście obowiązek stosunek |
40%. 60% | |
| Wspólny terminal | / | Używany jest jeden wspólny terminal. |
Specyfikacje wyjścia o dużej prędkości
| Przedmiot | Specyfikacje |
| Nazwa sygnału | Wyjście (YO—Y7) |
| Polaryzacja wyjściowa | AX7 AX7 |
| Obwód sterujący objtage | Prąd stały 5V-24V |
| Prąd znamionowy obciążenia | 100mA/punkt, 1A/COM |
| Maks. Tomtage drop w ON | 0.2 V (wartość typowa) |
| Prąd upływu przy WYŁĄCZENIU | Mniej niż 0.1mA |
| Częstotliwość wyjściowa | 200 kHz (Wyjście 200 kHz wymaga podłączonego zewnętrznie obciążenia równoważnego, które musi być większe niż 12 mA.) |
| Wspólny terminal | Każde osiem punktów korzysta z jednego wspólnego zacisku. |
Notatka:
- Szybkie porty I/O mają ograniczenia co do dozwolonej częstotliwości. Jeśli częstotliwość wejściowa lub wyjściowa przekracza dozwoloną wartość, sterowanie i identyfikacja mogą być nieprawidłowe. Ułóż porty I/O prawidłowo.
- Szybki interfejs wejściowy różnicowy nie akceptuje poziomu wejściowego ciśnienia różnicowego większego niż 7 V. W przeciwnym razie obwód wejściowy może ulec uszkodzeniu.
Wprowadzenie do oprogramowania programistycznego i pobieranie
Wprowadzenie do programowania oprogramowania
INVTMATIC Studio to programowalne oprogramowanie do programowania sterowników, które rozwija INVT. Zapewnia otwarte i w pełni zintegrowane środowisko programistyczne z zaawansowaną technologią i potężnymi funkcjami do rozwoju projektów, które opiera się na językach programowania zgodnych z normą IEC 61131-3. Jest szeroko stosowane w energetyce, transporcie, gospodarce komunalnej, metalurgii, chemii, farmacji, żywności, tekstyliach, opakowaniach, drukarstwie, gumie i tworzywach sztucznych, obrabiarkach i podobnych branżach.
Środowisko uruchomieniowe i pobieranie
Możesz zainstalować Invtmatic Studio na komputerze stacjonarnym lub przenośnym, którego system operacyjny to co najmniej Windows 7, przestrzeń pamięci to co najmniej 2 GB, wolna przestrzeń sprzętowa to co najmniej 10 GB, a główna częstotliwość CPU jest wyższa niż 2 GHz. Następnie możesz podłączyć komputer do modułu CPU programowalnego sterownika za pomocą kabla sieciowego i edytować programy użytkownika za pomocą oprogramowania Invtmatic Studio, aby móc pobierać i debugować programy użytkownika.
Instancja programowania
Poniżej opisano sposób programowania przy użyciu byłegoamp(AX72-C-1608N).
Najpierw podłącz wszystkie moduły sprzętowe programowalnego sterownika, w tym podłącz zasilanie do modułu CPU, podłącz moduł CPU do komputera, na którym zainstalowano Invtmatic Studio i do wymaganego modułu rozszerzeń, a także podłącz magistralę EtherCAT do napędu silnika. Uruchom Invtmatic Studio, aby utworzyć projekt i wykonać konfigurację programowania.
Procedura wygląda następująco:
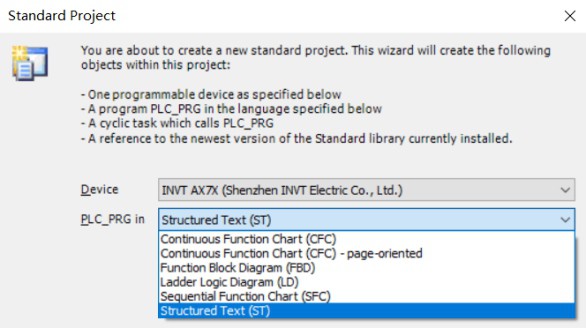
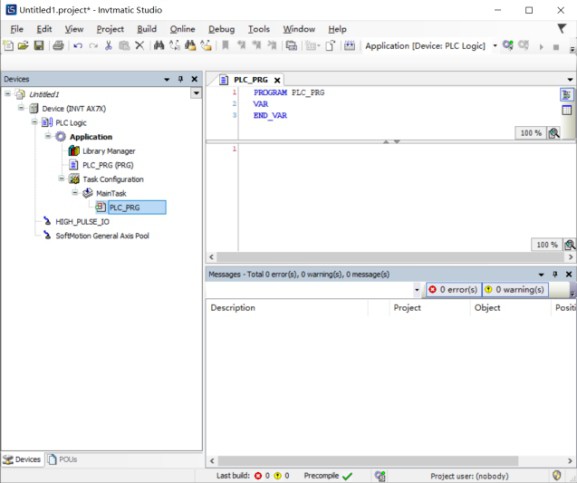
Krok 1 Wybierz File > Nowy projekt, wybierz standardowy typ projektu i ustaw lokalizację i nazwę zapisu projektu. Kliknij OK. Następnie wybierz urządzenie INVT AX7X i język programowania Structured Text (ST) w standardowym oknie konfiguracji projektu, które się pojawi. Pojawi się interfejs konfiguracji i programowania CODESYS.
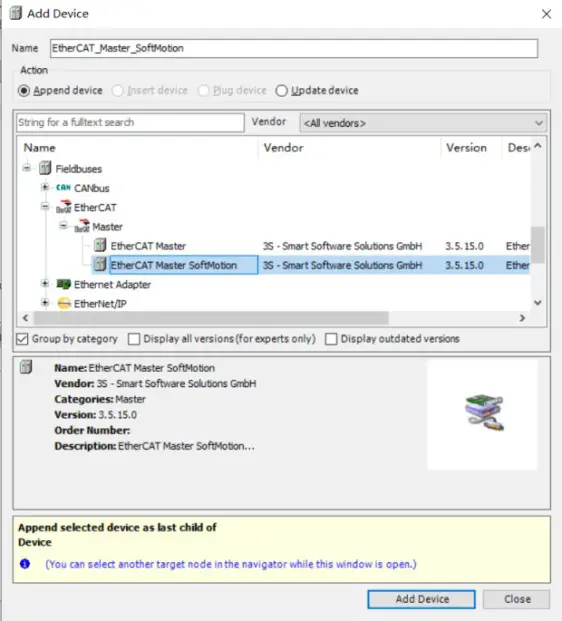
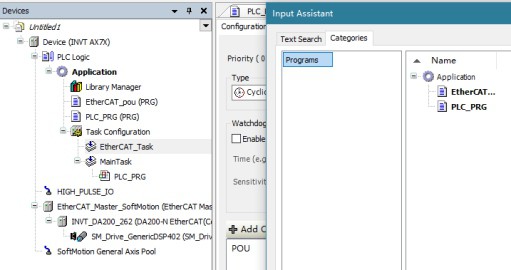
Krok 2 Kliknij prawym przyciskiem myszy na drzewie nawigacji Device. Następnie wybierz Add Device. Wybierz Ether CAT Master Soft Motion.
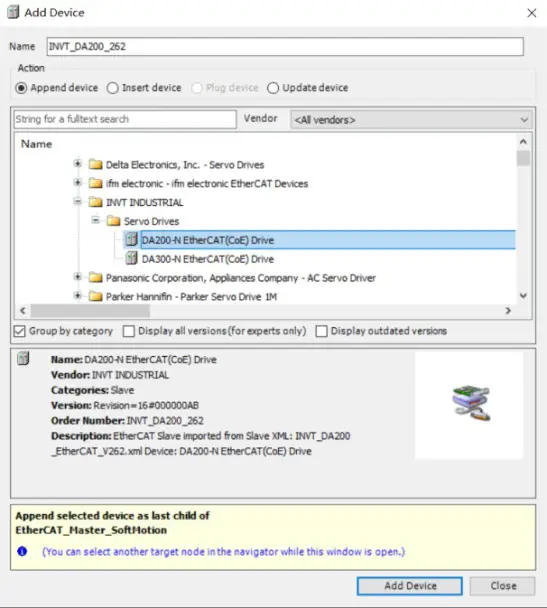
Krok 3 Kliknij prawym przyciskiem myszy EtherCAT_Master_SoftMotion na lewym drzewie nawigacyjnym. Wybierz Dodaj urządzenie. Wybierz DA200-N Ether CAT(CoE) Drive w wyświetlonym oknie.
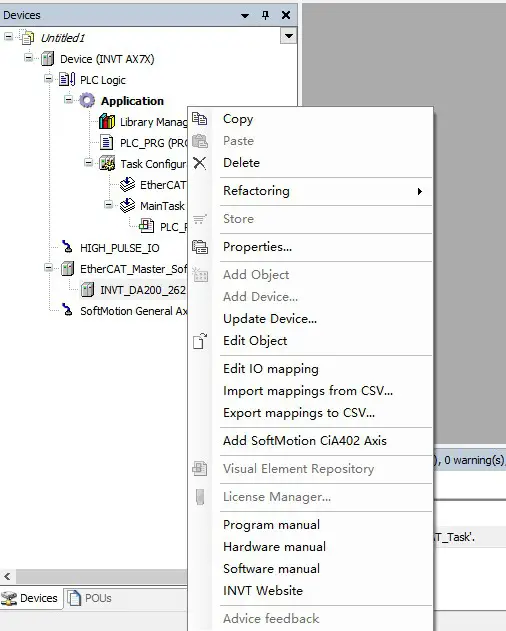
Krok 4 Z wyświetlonego menu skrótów wybierz opcję Dodaj oś SoftMotion CiA402.
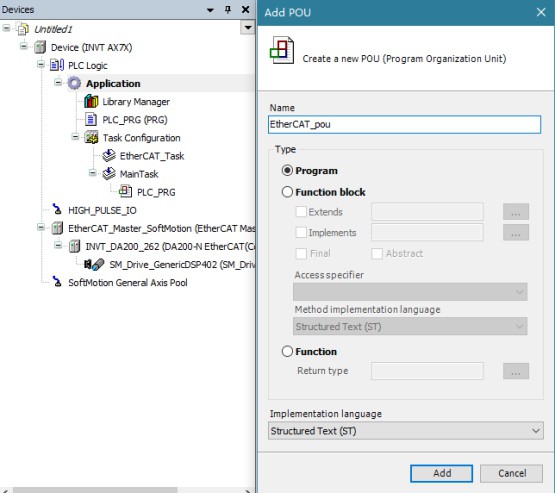
Krok 5 Kliknij prawym przyciskiem myszy Application na lewym drzewie nawigacyjnym i wybierz opcję dodania EtherCAT POU. Kliknij dwukrotnie automatycznie wygenerowany EtherCAT_Task, aby go wywołać. Wybierz utworzony EtherCAT_pou. Napisz program aplikacji na podstawie procesu kontroli aplikacji.
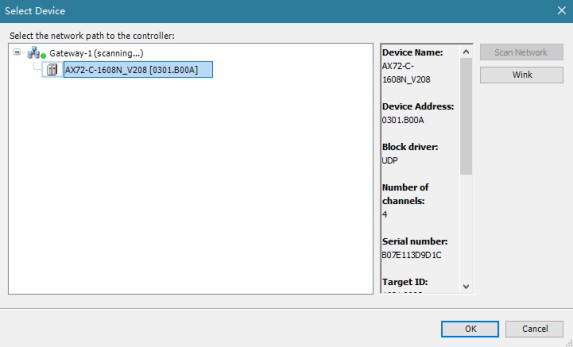
Krok 6 Kliknij dwukrotnie drzewo nawigacji urządzenia, kliknij opcję Skanuj sieć, wybierz AX72-C-1608N pokazany na poniższym rysunku i kliknij Wink. Następnie kliknij przycisk OK, gdy
Kontrolka systemowa CPU miga.
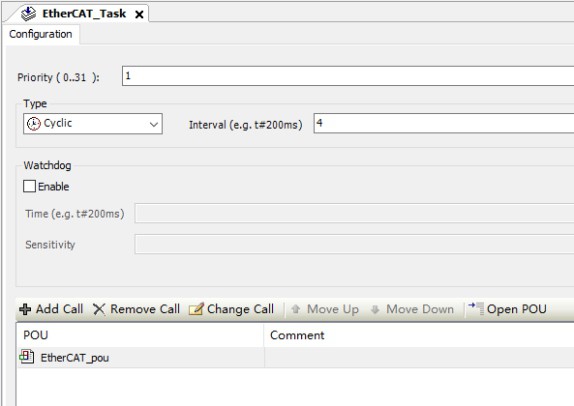
Krok 7 Kliknij dwukrotnie EtherCAT_Task w obszarze Task Configuration w lewym panelu. Ustaw priorytety zadań i interwały wykonywania na podstawie wymagań zadania w czasie rzeczywistym.
W Invtmatic Studio możesz kliknąć ![]() aby skompilować programy, a także możesz sprawdzić błędy według logów. Po potwierdzeniu, że kompilacja jest w pełni poprawna, możesz kliknąć
aby skompilować programy, a także możesz sprawdzić błędy według logów. Po potwierdzeniu, że kompilacja jest w pełni poprawna, możesz kliknąć ![]() aby zalogować się i pobrać programy użytkownika do programowalnego sterownika, a także przeprowadzić symulację debugowania.
aby zalogować się i pobrać programy użytkownika do programowalnego sterownika, a także przeprowadzić symulację debugowania.
Kontrola przed uruchomieniem i konserwacja zapobiegawcza
Kontrola przed uruchomieniem
Jeśli wykonałeś okablowanie, przed uruchomieniem modułu upewnij się, że:
- Kable wyjściowe modułu spełniają wymagania.
- Interfejsy rozszerzeń na wszystkich poziomach są niezawodnie połączone.
- Programy aplikacyjne wykorzystują prawidłowe metody działania i ustawienia parametrów.
Konserwacja zapobiegawcza
Wykonaj konserwację zapobiegawczą w następujący sposób:
- Kontroler programowalny należy regularnie czyścić, zapobiegać przedostawaniu się do niego ciał obcych oraz zapewnić dobrą wentylację i odprowadzanie ciepła z kontrolera.
- Sformułuj instrukcje konserwacji i regularnie testuj sterownik.
- Regularnie sprawdzaj okablowanie i zaciski, aby upewnić się, że są dobrze zamocowane.
Więcej informacji
Prosimy o kontakt w celu uzyskania dalszych informacji. Przy składaniu zapytania prosimy o podanie modelu produktu oraz numeru seryjnego.
Aby uzyskać powiązane informacje o produkcie lub usłudze, możesz:
- Skontaktuj się z lokalnym biurem INVT.
- Odwiedzać www.invt.com.
- Zeskanuj poniższy kod QR.

Centrum obsługi klienta, Shenzhen INVT Electric Co., Ltd.
Adres: INVT Guangming Technology Building, Songbai Road, Matian, Guangming District, Shenzhen, Chiny
Prawa autorskie © INVT. Wszelkie prawa zastrzeżone. Informacje zawarte w instrukcji mogą ulec zmianie bez wcześniejszego powiadomienia.

202207 (wersja 1.0)
Dokumenty / Zasoby
 |
Moduł CPU serii AX7 invt [plik PDF] Instrukcja obsługi Moduł CPU serii AX7, Seria AX7, Moduł CPU, Moduł |



