![]()
AX7 ![]() Manual d'usuari del mòdul CPU de la sèrie
Manual d'usuari del mòdul CPU de la sèrie
Mòdul CPU de la sèrie AX7
Gràcies per triar el controlador programable de la sèrie AX (controlador programable abreujat).
Basat en la plataforma Invtmatic Studio, el controlador programable és totalment compatible amb els sistemes de programació IEC61131-3, bus de camp en temps real EtherCAT, bus de camp CANopen i ports d'alta velocitat, i proporciona lleves electròniques, engranatges electrònics i funcions d'interpolació.
El manual descriu principalment les especificacions, les característiques, el cablejat i els mètodes d'ús del mòdul CPU del controlador programable. Per assegurar-vos que feu servir el producte de manera segura i correcta i que el poseu en funcionament, llegiu atentament el manual abans d'instal·lar-lo. Per obtenir més informació sobre els entorns de desenvolupament de programes d'usuari i els mètodes de disseny de programes d'usuari, consulteu el Manual d'usuari del maquinari del controlador programable de la sèrie AX i el Manual d'usuari del programari del controlador programable de la sèrie AX que publiquem.
El manual està subjecte a canvis sense previ avís. Si us plau, visiteu http://www.invt.com per descarregar l'última versió del manual.
Precaucions de seguretat
Avís
| Símbol | Nom | Descripció | Abreviatura |
| Perill |
Perill | Es poden produir lesions personals greus o fins i tot la mort si no es compleixen els requisits relacionats. | |
| Avís |
Avís | Es poden produir lesions personals o danys a l'equip si no es compleixen els requisits relacionats. |
Entrega i instal·lació
| • Només professionals formats i qualificats poden realitzar la instal·lació, el cablejat, el manteniment i la inspecció. • No instal·leu el controlador programable en inflamables. A més, eviteu que el controlador programable entri en contacte o s'adhereixi als inflamables. • Instal·leu el controlador programable en un gabinet de control amb clau d'IP20 com a mínim, la qual cosa evita que el personal sense coneixements relacionats amb l'equip elèctric es toqui per error, ja que l'error pot provocar danys en l'equip o descàrrega elèctrica. Només el personal que hagi rebut coneixements elèctrics relacionats i formació en funcionament d'equips pot operar l'armari de control. • No feu funcionar el controlador programable si està danyat o incomplet. • No contacteu el controlador programable amb damp objectes o parts del cos. En cas contrari, es podria produir una descàrrega elèctrica. |
Selecció de cables
| • Només professionals formats i qualificats poden realitzar la instal·lació, el cablejat, el manteniment i la inspecció. • Entendre completament els tipus d'interfície, les especificacions i els requisits relacionats abans del cablejat. En cas contrari, provocarà un cablejat incorrecte córrer anormal. • Talleu totes les fonts d'alimentació connectades al controlador programable abans de realitzar el cablejat. • Abans d'engegar-lo per funcionar, assegureu-vos que cada coberta de terminals del mòdul estigui instal·lada correctament al seu lloc un cop finalitzada la instal·lació i el cablejat. Això evita que es toqui un terminal en directe. En cas contrari, es poden produir lesions físiques, fallades de l'equip o mal funcionament. • Instal·leu components o dispositius de protecció adequats quan utilitzeu fonts d'alimentació externes per al controlador programable. Això evita que el controlador programable es faci malbé a causa de fallades de la font d'alimentació externa, sobrevoltage, sobreintensitat o altres excepcions. |
Posada en marxa i funcionament
| • Abans d'engegar-lo, assegureu-vos que l'entorn de treball del controlador programable compleix els requisits, que el cablejat és correcte, que les especificacions de potència d'entrada compleixen els requisits i que s'ha dissenyat un circuit de protecció per protegir el controlador programable de manera que el programable El controlador pot funcionar de manera segura fins i tot si es produeix una fallada en un dispositiu extern. • Per als mòduls o terminals que requereixen una font d'alimentació externa, configureu dispositius de seguretat externs com ara fusibles o interruptors automàtics per evitar danys causats per avaries de l'alimentació externa o del dispositiu. |
Manteniment i substitució de components
| • Només professionals formats i qualificats poden dur a terme el manteniment, la inspecció i la substitució de components del controlador programable. • Talleu totes les fonts d'alimentació connectades al controlador programable abans del cablejat del terminal. • Durant el manteniment i la substitució de components, preneu mesures per evitar que els cargols, cables i altres materials conductors caiguin a l'interior del controlador programable. |
Eliminació
| El controlador programable conté metalls pesants. Eliminar un controlador programable de ferralla com a residu industrial. | |
| Llenceu un producte de ferralla per separat en un punt de recollida adequat però no el col·loqueu al corrent de residus normal. |
Presentació del producte
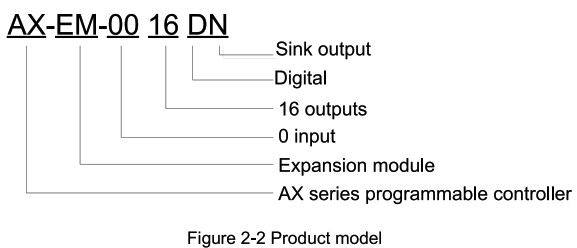
Model i placa identificativa
S'ha acabat la funcióview
Com a mòdul de control principal del controlador programable, el mòdul CPU AX7J-C-1608L] (abreviament mòdul CPU) té les funcions següents:
- Realitza el control, la supervisió, el processament de dades i la comunicació en xarxa per al sistema en funcionament.
- Admet els llenguatges de programació IL, ST, FBD, LD, CFC i SFC que compleixen els estàndards IEC61131-3 mitjançant la plataforma Invtmatic Studio que INVT ha llançat per a la programació.
- Admet 16 mòduls d'expansió locals (com ara els mòduls d'E/S, de temperatura i analògics).
- Utilitza un bus obert Ether CAT o CAN per connectar mòduls esclaus, cadascun dels quals admet 16 mòduls d'expansió (com ara els mòduls d'E/S, de temperatura i analògics).
- Admet el protocol Modbus TCP mestre/esclau.
- Integra dues interfícies RS485, compatibles amb el protocol mestre/esclau Modbus RTU.
- Admet E/S d'alta velocitat, 16 entrades d'alta velocitat i 8 sortides d'alta velocitat.
- Admet el control de moviment del bus de camp EtherCAT amb un temps de sincronització d'1 ms, 2 ms, 4 ms o 8 ms.
- Admet el control de moviment basat en polsos d'un eix o múltiples, inclosa la interpolació lineal de 2-4 eixos i la interpolació d'arc de 2 eixos.
- Admet el rellotge en temps real.
- Admet la protecció de dades per fallada d'alimentació.
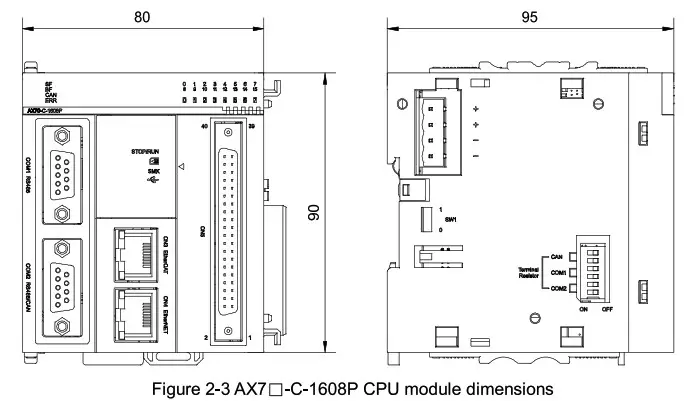
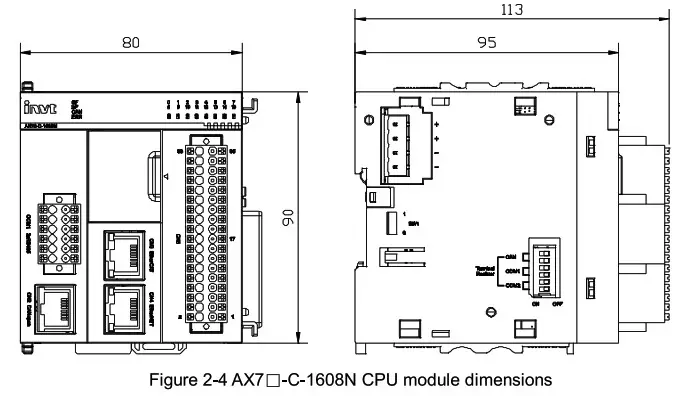
Dimensions estructurals
Les dimensions estructurals (unitat: mm) es mostren a la figura següent.
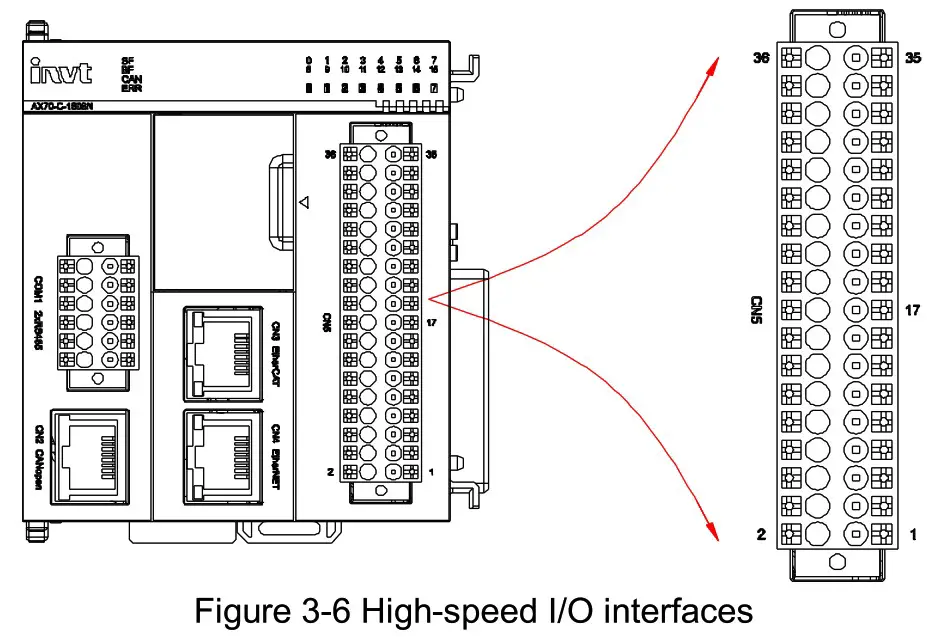
Interfície
Descripció de la interfície
Distribució de la interfície
La figura 3-1 i la figura 3-2 mostren la distribució de la interfície del mòdul de la CPU. Per a cada interfície, es proporciona una descripció de pantalla de seda respectiva a prop, que facilita el cablejat, el funcionament i la comprovació.
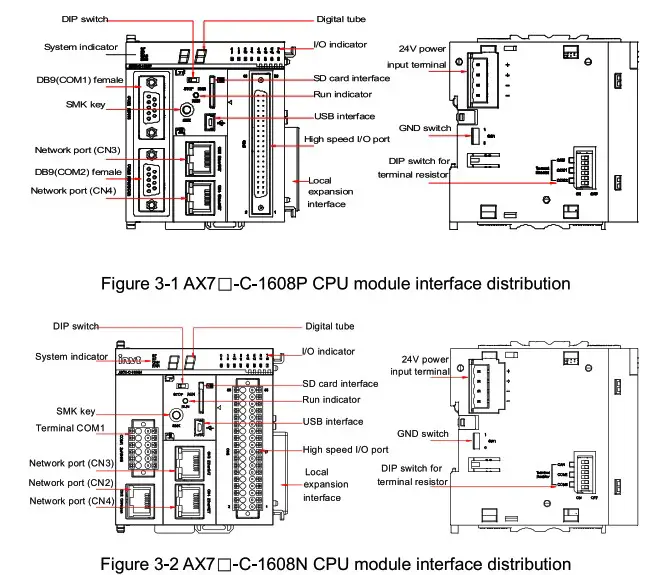
| Interfície | Funció | |
| Interruptor DIP | Interruptor DIP RUN/STOP. | |
| Indicador del sistema | SF: indicador d'error del sistema. BF: indicador d'error del bus. CAN: indicador d'error del bus CAN. ERR: indicador d'error del mòdul. |
|
| Clau SMK | Clau intel·ligent SMK. | |
| WO-C-1608P | COM1 (DB9) femella |
Una interfície RS485, compatible amb Modbus RTU protocol mestre/esclau. |
| COM2 (DB9) femella |
Una interfície RS485 i l'altra interfície CAN La interfície RS485 admet el protocol mestre/esclau Modbus RTU i l'altra interfície CAN admet el protocol mestre/esclau CANopen. |
|
| AX70-C-1608N | COM1&COM2 (terminal d'entrada n) | Dues interfícies RS485, compatibles amb Modbus RTU protocol mestre/esclau. |
| CN2 (RJ45) | Interfície CAN, compatible amb el protocol mestre/esclau CAN obert. | |
| CN3 (RJ45) | Interfície Ether CAT | |
| CN4 (RJ45) | 1.Protocol Modbus TCP 2.Funcions Ethernet estàndard 3.Descàrrega i depuració del programa d'usuari (només amb IPv4) |
|
| Tub digital | Mostra alarmes i respostes a la pressió de la tecla SMK. | |
| Indicador d'E/S | Indica si els senyals de 16 entrades i 8 sortides són vàlids. | |
| Interfície de la targeta SD | S'utilitza per emmagatzemar programes i dades d'usuari. | |
| Indicador d'execució | Indica si el mòdul de la CPU s'està executant. | |
| Interfície USB | S'utilitza per descarregar i depurar programes. | |
| E/S d'alta velocitat | 16 entrades d'alta velocitat i 8 sortides d'alta velocitat. | |
| Interfície d'expansió local | Admet l'expansió de 16 mòduls d'E/S, no permetent l'intercanvi en calent. | |
| Interfície d'alimentació de 24 V | DC 24V voltage entrada | |
| Interruptor de presa de terra | Interruptor de connexió entre la terra digital interna del sistema i la terra de l'habitatge. Està desconnectat per defecte (SW1 està configurat en 0). Només s'utilitza en escenaris especials on la terra digital interna del sistema es pren com a pla de referència. Aneu amb compte abans d'utilitzar-lo. En cas contrari, l'estabilitat del sistema es veu afectada. | |
| Interruptor DIP de la resistència terminal | ON indica la connexió de la resistència del terminal (està OFF per defecte). COM1 correspon a RS485-1, COM2 correspon a RS485-2 i CAN correspon a CAN. | |
Clau SMK
La clau SMK s'utilitza principalment per restablir l'adreça IP del mòdul de la CPU (rP) i esborrar els programes d'aplicació (cA). L'adreça predeterminada del mòdul de la CPU és 192.168.1.10. Si voleu restaurar l'adreça per defecte des d'una adreça IP modificada, podeu restaurar l'adreça per defecte mitjançant la clau SMK. El mètode és el següent:
- Establiu el mòdul de la CPU a l'estat STOP. Premeu la tecla SMK. Quan el tub digital mostri "rP", premeu i manteniu premuda la tecla SMK. A continuació, el tub digital mostra "rP" i s'apaga alternativament, indicant que s'està realitzant el restabliment de l'adreça IP. L'operació de restabliment té èxit quan el tub digital està apagat constantment. Si deixeu anar la tecla SMK en aquest moment, el tub digital mostra "rP". Manteniu premuda la tecla SMK fins que el tub mostri "00" (rP—cA—rU-rP).
- Si deixeu anar la tecla SMK durant el procés en què el tub digital mostra "rP" i s'apaga alternativament, l'operació de restabliment de l'adreça IP es cancel·la i el tub digital mostra "rP".
Per esborrar un programa del mòdul de la CPU, feu el següent:
Premeu la tecla SMK. Quan el tub digital mostri "cA", premeu i manteniu premuda la tecla SMK. A continuació, el tub digital mostra "rP" i s'apaga alternativament, indicant que el programa s'està esborrant. Quan el tub digital estigui apagat constantment, reinicieu el mòdul de la CPU. El programa s'ha esborrat correctament.
Descripció del tub digital
- Si els programes no tenen cap error després de la descàrrega, el tub digital del mòdul de la CPU mostra "00" de manera constant.
- Si un programa té una fallada, el tub digital mostra la informació de la fallada de forma intermitent.
- Per exampSi només es produeix l'error 19, el tub digital mostra "19" i s'apaga alternativament. Si l'error 19 i l'error 29 es produeixen simultàniament, el tub digital mostra "19", s'apaga, mostra "29" i s'apaga alternativament. Si es produeixen més errors simultàniament, la forma de visualització és similar.
Definició de terminal
AX7![]() -Definició del terminal de comunicació C-1608P COM1/COM2
-Definició del terminal de comunicació C-1608P COM1/COM2
Per al mòdul CPU AX7LJ-C-1608P, COM1 és el terminal de comunicació RS485 i COM2 és el terminal de comunicació RS485/CAN, tots dos utilitzen un connector DB9 per a la transmissió de dades. Les interfícies i els pins es descriuen a continuació.
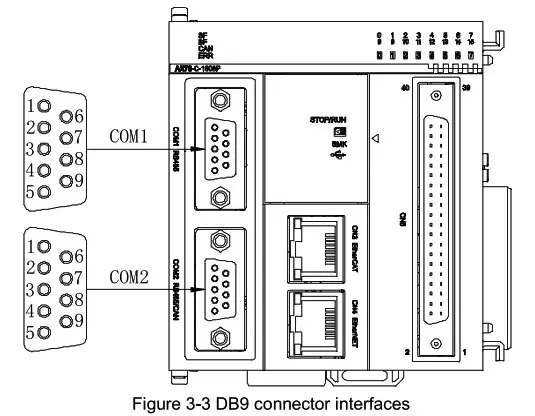
Taula 3-1 Pins del connector COM1/COM2 DB39
| Interfície | Distribució | Pin | Definició | Funció |
| COM1 (RS485) |
1 | / | / | |
| 2 | / | / | ||
| 3 | / | / | ||
| 4 | RS485A | Senyal diferencial RS485 + | ||
| 5 | RS485B | Senyal diferencial RS485 - | ||
| 6 | / | / | ||
| 7 | / | / | ||
| 8 | / | / | ||
| 9 | GND_RS485 | Terra d'alimentació RS485 | ||
| COM2 (RS485/CAN) |
1 | / | / | |
| 2 | CAN _L | senyal diferencial CAN - | ||
| 3 | / | / | ||
| 4 | RS485A | Senyal diferencial RS485 + | ||
| 5 | RS485B | Senyal diferencial RS485 - | ||
| 6 | GND_CAN | Terra d'alimentació CAN | ||
| 7 | CAN _H | senyal diferencial CAN + | ||
| 8 | / | / | ||
| 9 | GND_RS485 | Terra d'alimentació RS485 |
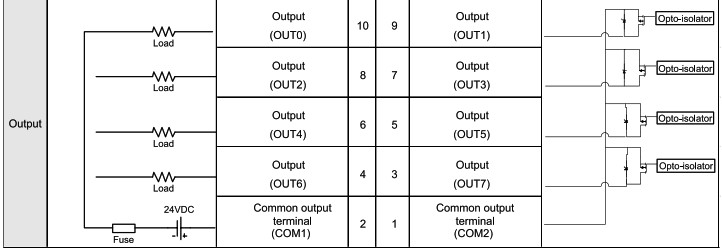
AX7![]() -Definició de terminal d'E/S d'alta velocitat C-1608P
-Definició de terminal d'E/S d'alta velocitat C-1608P
AX7![]() - El mòdul CPU C-1608P té 16 entrades d'alta velocitat i 8 sortides d'alta velocitat. Les interfícies i els pins es descriuen a continuació.
- El mòdul CPU C-1608P té 16 entrades d'alta velocitat i 8 sortides d'alta velocitat. Les interfícies i els pins es descriuen a continuació.
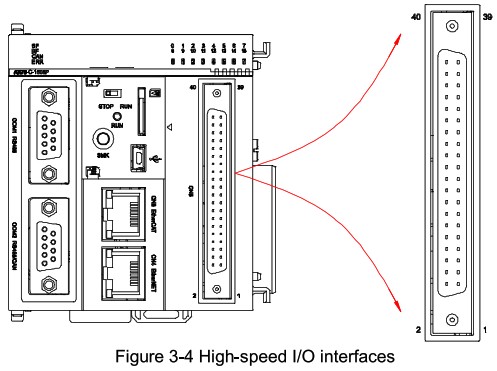
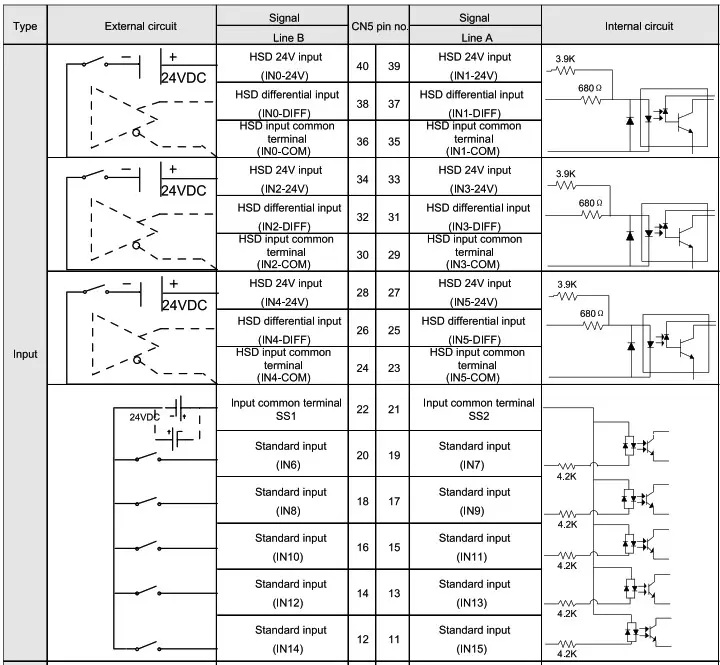
Taula 3-2 Pins d'E/S d'alta velocitat
AX7![]() -Definició del terminal de comunicació C-1608N COM1/CN2
-Definició del terminal de comunicació C-1608N COM1/CN2
Per a AX7![]() -Mòdul CPU C-1608N, COM1 és el terminal de comunicació RS485 de dos canals, que utilitza un connector push-in de 12 pins per a la transmissió de dades. CN2 és el terminal de comunicació CAN, que utilitza el connector RJ45 per a la transmissió de dades. Les interfícies i els pins es descriuen a continuació.
-Mòdul CPU C-1608N, COM1 és el terminal de comunicació RS485 de dos canals, que utilitza un connector push-in de 12 pins per a la transmissió de dades. CN2 és el terminal de comunicació CAN, que utilitza el connector RJ45 per a la transmissió de dades. Les interfícies i els pins es descriuen a continuació.

Taula 3-3 Pins del connector COM1/CN2
| Funcions del terminal push-in de COM1 | ||||
| Definició | Funció | Pin | ||
| COM1 RS485 | A | Senyal diferencial RS485 + |
12 | |
| B | Senyal diferencial RS485 - | 10 | ||
| GND | Potència del xip RS485_1 terra |
8 | ||
| PE | Escut a terra | 6 | ||
| COM2 RS485 | A | Senyal diferencial RS485 + |
11 | |
| B | Senyal diferencial RS485 - | 9 | ||
| GND | Potència del xip RS485_2 terra |
7 | ||
| PE | Escut a terra | 5 | ||
| Nota: els pins 1-4 no s'utilitzen. | ||||
| Funcions pin de CN2 | ||||
| Definició | Funció | Pin | ||
| CANopen | GND | Terra d'alimentació CAN | 1 | |
| CAN_L | senyal diferencial CAN - | 7 | ||
| CAN_H | senyal diferencial CAN + | 8 | ||
| Nota: els pins 2-6 no s'utilitzen. | ||||
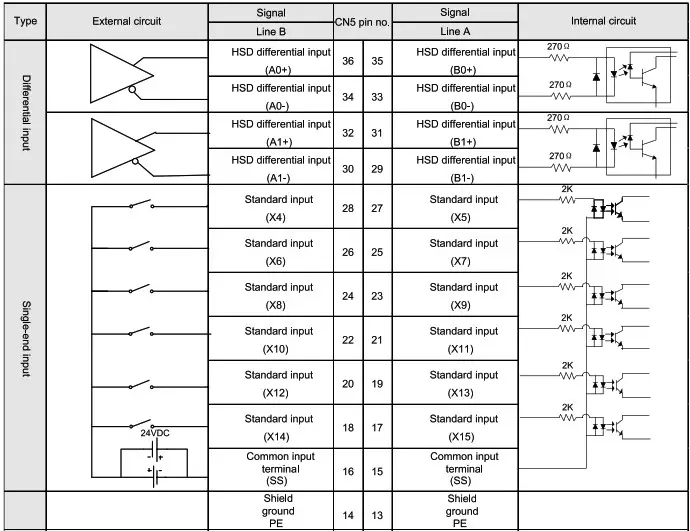
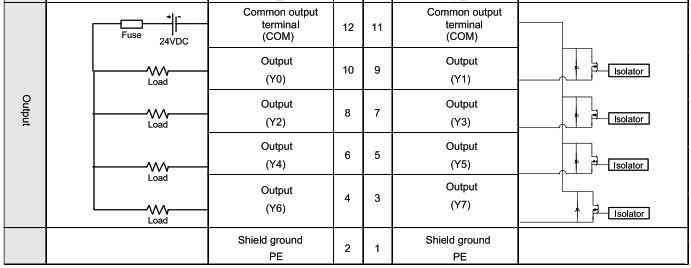
AX7![]() -Definició de terminal d'E/S d'alta velocitat C-1608N
-Definició de terminal d'E/S d'alta velocitat C-1608N
AX7![]() El mòdul CPU 1-C-1608N té 16 entrades d'alta velocitat i 8 sortides d'alta velocitat. La figura següent mostra la distribució del terminal i la taula següent enumera els pins.
El mòdul CPU 1-C-1608N té 16 entrades d'alta velocitat i 8 sortides d'alta velocitat. La figura següent mostra la distribució del terminal i la taula següent enumera els pins.
Taula 3-4 Pins d'E/S d'alta velocitat
Nota:
- Els 16 canals d'entrada de l'AX7
 -El mòdul de CPU C-1608P permet l'entrada d'alta velocitat, però els primers 6 canals admeten l'entrada única o diferencial de 24 V, i els darrers 10 canals admeten l'entrada d'un sol 24 V.
-El mòdul de CPU C-1608P permet l'entrada d'alta velocitat, però els primers 6 canals admeten l'entrada única o diferencial de 24 V, i els darrers 10 canals admeten l'entrada d'un sol 24 V. - Els 16 canals d'entrada de l'AX7-El mòdul CPU C-1608N permet l'entrada d'alta velocitat, però els primers 4 canals admeten l'entrada diferencial i els últims 12 canals admeten l'entrada d'un sol 24 V.
- Cada punt d'E/S està aïllat del circuit intern.
- La longitud total del cable de connexió del port d'E/S d'alta velocitat no pot superar els 3 metres.
- No doblegueu els cables quan els fixeu.
- Durant l'encaminament dels cables, separeu els cables de connexió dels cables d'alta potència que causen interferències fortes, però no uneixen els cables de connexió amb aquests últims. A més, eviteu l'encaminament paral·lel de llarga distància.
Instal·lació del mòdul
Amb un disseny modular, el controlador programable és fàcil d'instal·lar i mantenir. Pel que fa al mòdul CPU, els principals objectes de connexió són els mòduls d'alimentació i d'expansió.
Els mòduls es connecten mitjançant les interfícies de connexió i els ajustos a pressió proporcionats pel mòdul.
El procediment de muntatge és el següent:
| Pas 1 Feu lliscar l'enganxament del mòdul de la CPU en la direcció que es mostra a la figura següent (utilitzant el mòdul d'alimentació connexió per example). |
Pas 2 Alineeu el mòdul de la CPU amb el connector del mòdul d'alimentació per a l'enclavament. |
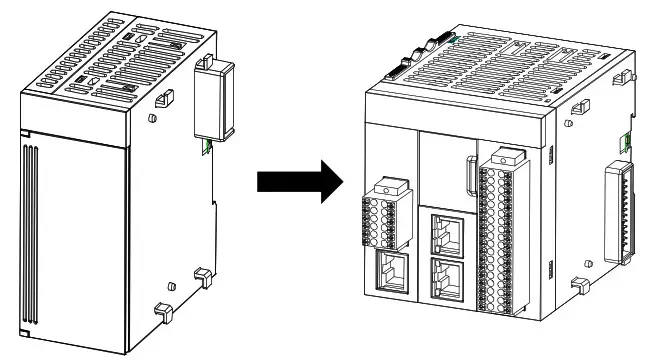 |
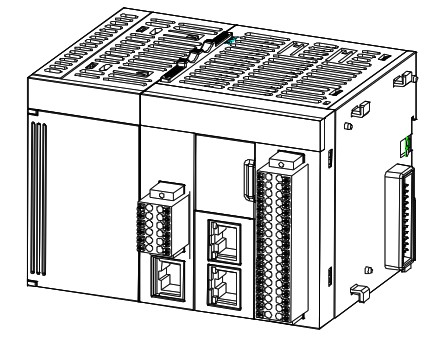 |
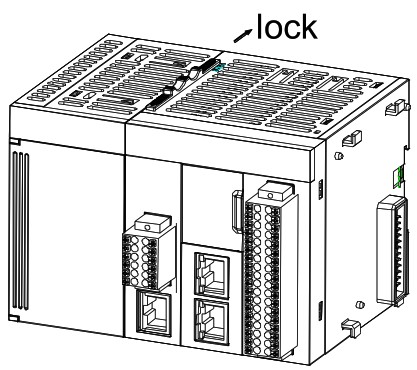
| Pas 3 Feu lliscar l'enganxament del mòdul de la CPU en la direcció que es mostra a la figura següent per connectar i bloquejar els dos mòduls. | Pas 4 Pel que fa a la instal·lació estàndard del carril DIN, enganxeu el mòdul respectiu al carril d'instal·lació estàndard fins que l'enganxament encaixi al seu lloc. |
 |
 |
Connexió del cable i especificacions
Connexió de bus Ether CAT
Especificacions del bus Ether CAT
| Item | Descripció |
| Protocol de comunicació | Èter CAT |
| Servei suportat | COE (DOP/SDO) |
| Min. interval de sincronització | 1 ms/4 eixos (valor típic) |
| Mètode de sincronització | DC per a sincronització/DC no utilitzat |
| Capa física | 100BASE-TX |
| Mode dúplex | Dúplex complet |
| Estructura de la topologia | Connexió en sèrie |
| Mitjà de transmissió | Cable de xarxa (vegeu la secció "Selecció del cable") |
| Distància de transmissió | Menys de 100 m entre dos nodes |
| Nombre de nodes esclaus | Fins a 125 |
| Longitud del fotograma Ether CAT | 44 bytes-1498 bytes |
| Dades del procés | Fins a 1486 bytes continguts en una única trama |
Selecció de cables
El mòdul CPU pot implementar la comunicació de bus Ether CAT a través del port CN3. Es recomanen cables estàndard INVT. Si feu els cables de comunicació vosaltres mateixos, assegureu-vos que compleixin els requisits següents:
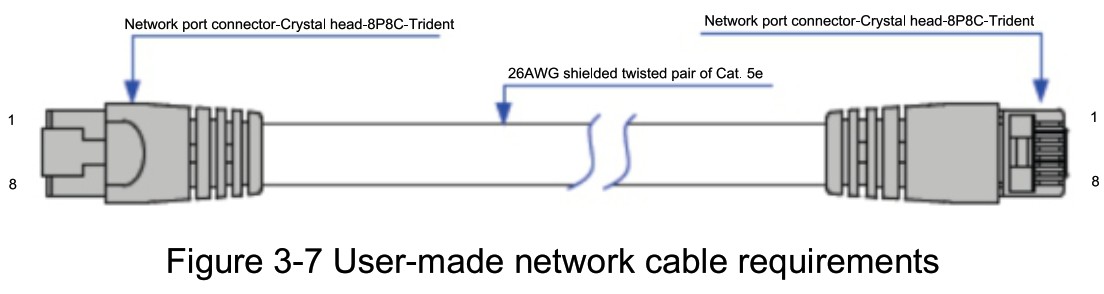
Nota:
- Els cables de comunicació que utilitzeu han de passar la prova de conductivitat al 100%, sense curtcircuit, circuit obert, dislocació o mal contacte.
- Per garantir la qualitat de la comunicació, la longitud del cable de comunicació EtherCAT no pot superar els 100 metres.
- Es recomana fer els cables de comunicació utilitzant cables de parell trenat apantallat de categoria 5e, compatibles amb EIA/TIA568A, EN50173, ISO/IEC11801, EIA/TIA butlletí TSB i EIA/TIA SB40-A&TSB36.
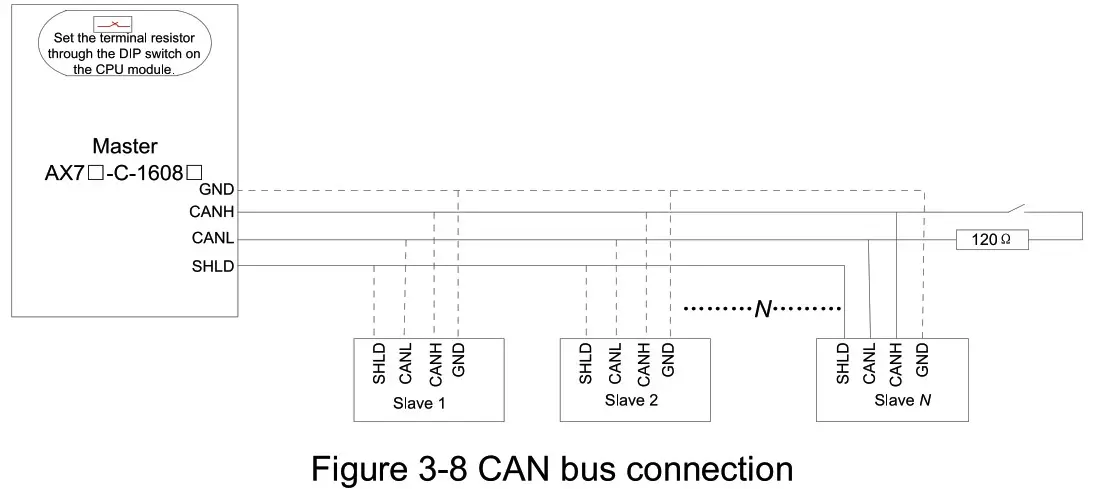
POT obrir la connexió del cable
Treball en xarxa
L'estructura de la topologia de connexió del bus CAN es mostra a la figura següent. Es recomana utilitzar el parell trenat blindat per a la connexió del bus CAN. Cada extrem del bus CAN es connecta a una resistència terminal de 1200 per evitar la reflexió del senyal. En la majoria dels casos, la capa d'escut utilitza una connexió a terra d'un sol punt.
Selecció de cables
- Per a AX7- Mòdul CPU C-1608P, el mateix terminal s'utilitza tant per a la comunicació CANopen com per a la comunicació RS485, utilitzant un connector DB9 per a la transmissió de dades. Els pins del connector DB9 s'han descrit anteriorment.
- Per a AX7Mòdul CPU 1-C-1608N, el terminal RJ45 s'utilitza per a la comunicació CANopen per a la transmissió de dades. Els pins del connector RJ45 s'han descrit anteriorment.
Es recomanen cables estàndard INVT. Si feu els cables de comunicació per vosaltres mateixos, feu els cables segons la descripció del pin i assegureu-vos que el procés de fabricació i els paràmetres tècnics compleixin els requisits de comunicació.
Nota:
- Per millorar la capacitat d'anti-interferència del cable, es recomana utilitzar tècniques de blindatge de paper d'alumini i blindatge de trenes d'alumini i magnesi a l'hora de fer els cables.
- Utilitzeu la tècnica de bobinat de parells trenats per als cables diferencials.
Connexió de comunicació sèrie RS485
El mòdul CPU admet 2 canals de comunicació RS485.
- Per a AX7-Mòdul CPU C-1608P, els ports COM1 i COM2 utilitzen el connector DB9 per a la transmissió de dades. Els pins del connector DB9 s'han descrit anteriorment.
- Per a AX7-Mòdul CPU C-1608N, el port utilitza el connector de terminal de 12 pins per a la transmissió de dades. Els pins del connector del terminal s'han descrit anteriorment.
Es recomanen cables estàndard INVT. Si feu els cables de comunicació per vosaltres mateixos, feu els cables segons la descripció del pin i assegureu-vos que el procés de fabricació i els paràmetres tècnics compleixin els requisits de comunicació.
Nota:
- Per millorar la capacitat d'anti-interferència del cable, es recomana utilitzar tècniques de blindatge de paper d'alumini i blindatge de trenes d'alumini i magnesi a l'hora de fer els cables.
- Utilitzeu la tècnica de bobinat de parells trenats per als cables diferencials.
Connexió Ethernet
Treball en xarxa
El port Ethernet del mòdul de la CPU és CN4, que es pot connectar a un altre dispositiu com un ordinador o un dispositiu HMI mitjançant un cable de xarxa en el mode punt a punt.
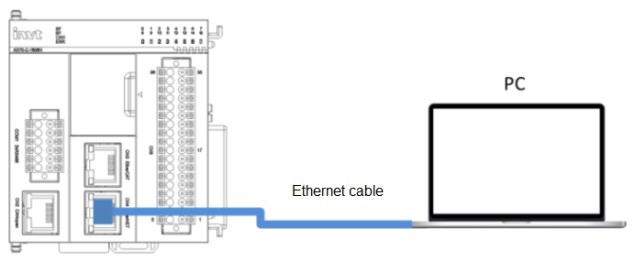
Figura 3-9 Connexió Ethernet
També podeu connectar el port Ethernet a un concentrador o commutador mitjançant un cable de xarxa, implementant una connexió multipunt.

Figura 3-10 Xarxa Ethernet
Selecció de cables
Per millorar la fiabilitat de la comunicació, utilitzeu cables de parell trenat apantallats de categoria 5 o superior com a cables Ethernet. Es recomanen cables estàndard INVT.
Utilitzeu instruccions
Paràmetres tècnics
Especificacions generals del mòdul CPU
| Item | Descripció | |||||
| Vol d’entradatage | 24VDC | |||||
| Consum d'energia | < 15 W | |||||
| Fallada d'alimentació temps de protecció |
300 ms (sense protecció en 20 segons després de l'encesa) | |||||
| Bateria de seguretat del rellotge en temps real |
Admet | |||||
| Potència del bus del pla posterior subministrament |
5V/2.5A | |||||
| Mètode de programació | Llenguatges de programació IEC 61131-3 (LD, FBD, IL, ST, SFC, i CFC) |
|||||
| Execució del programa mètode |
Local en línia | |||||
| Emmagatzematge de programes d'usuari espai |
10 MB | |||||
| Espai de memòria flaix per fallada elèctrica protecció |
512 KB | |||||
| Targeta SD especificacions |
MicroSD 32G | |||||
| Elements suaus i característiques |
||||||
| Element | Nom | Compte | Característiques d'emmagatzematge | |||
| Per defecte | Wrltable | Descripció | ||||
| I | Relé d'entrada | 64 Kword | No guardar | No | X: 1 bit B. 8 bits W: 16 bits D: 32 bits L: 64 bits | |
| Q | Relé de sortida | 64 Kword | No guardar | No | ||
| M | Sortida auxiliar | 256 Kword | Desa | Sí | ||
| Retenció del programa mètode sobre potència fracàs |
Retenció pel flaix intern | |||||
| Mode d'interrupció | El senyal DI d'alta velocitat del mòdul de la CPU es pot establir com a entrada d'interrupció, permetent fins a vuit punts d'entrada, i es poden configurar els modes d'interrupció del front ascendent i descendent. | |||||
Especificacions d'E/S d'alta velocitat
Especificacions d'entrada d'alta velocitat
| Item | Especificacions | |
| Nom del senyal | Entrada diferencial d'alta velocitat | Entrada d'un sol extrem d'alta velocitat |
| Entrada nominal voltage |
2.5 V | 24VDC (-15% — +20%, pulsant dins del 5%) |
| Entrada nominal actual |
6.8 mA | 5.7 mA (valor típic) (a 24 V CC) |
| corrent ON | / | Menys de 2 mA |
| corrent OFF | / | Menys de 1 mA |
| Resistència d'entrada | 5400 | 2.2k0 |
| Màx. comptant velocitat |
800K polsos/s (freqüència quatre vegades 2PH), 200kHz (un sol canal d'entrada) | |
| Servei d'entrada 2PH proporció |
40%. 60% | |
| Terminal comú | / | S'utilitza un terminal comú. |
Especificacions de sortida d'alta velocitat
| Item | Especificacions |
| Nom del senyal | Sortida (YO—Y7) |
| Polaritat de sortida | AX7 AX7 |
| Circuit de control voltage | DC 5V-24V |
| Corrent de càrrega nominal | 100 mA/punt, 1A/COM |
| Màx. voltage baixa a ON | 0.2 V (valor típic) |
| Corrent de fuga a OFF | Menys de 0.1 mA |
| Freqüència de sortida | 200 kHz (La sortida de 200 kHz requereix que la càrrega equivalent connectada externament sigui superior a 12 mA.) |
| Terminal comú | Cada vuit punts utilitzen un terminal comú. |
Nota:
- Els ports d'E/S d'alta velocitat tenen restriccions sobre la freqüència permesa. Si la freqüència d'entrada o sortida supera el valor permès, el control i la identificació poden ser anormals. Organitzeu correctament els ports d'E/S.
- La interfície d'entrada diferencial d'alta velocitat no accepta el nivell d'entrada de pressió diferencial superior a 7 V. En cas contrari, el circuit d'entrada es podria danyar.
Introducció i descàrrega del programari de programació
Introducció al programari de programació
INVTMATIC Studio és un programari de programació de controladors programables que desenvolupa INVT. Proporciona un entorn de desenvolupament de programació obert i totalment integrat amb tecnologia avançada i funcions potents per al desenvolupament de projectes que es basa en llenguatges de programació compatibles amb IEC 61131-3. S'utilitza àmpliament en energia, transport, municipal, metal·lúrgia, química, farmacèutica, alimentació, tèxtil, embalatge, impressió, cautxú i plàstics, màquines eina i indústries similars.
Entorn d'execució i descàrrega
Podeu instal·lar Invtmatic Studio en un ordinador d'escriptori o portàtil, del qual el sistema operatiu és almenys Windows 7, l'espai de memòria és d'almenys 2 GB, l'espai de maquinari lliure és d'almenys 10 GB i la freqüència principal de la CPU és superior a 2 GHz. A continuació, podeu connectar el vostre ordinador al mòdul de la CPU del controlador programable mitjançant un cable de xarxa i editar els programes d'usuari mitjançant el programari Invtmatic Studio perquè pugueu descarregar i depurar programes d'usuari.
Instància de programació
A continuació es descriu com realitzar la programació utilitzant un example (AX72-C-1608N).
En primer lloc, connecteu tots els mòduls de maquinari del controlador programable, inclosa la connexió de la font d'alimentació al mòdul de la CPU, la connexió del mòdul de la CPU a l'ordinador on s'ha instal·lat Invtmatic Studio i al mòdul d'expansió necessari, i la connexió del bus EtherCAT a la unitat del motor. Inicieu Invtmatic Studio per crear un projecte i realitzar la configuració de programació.
El procediment és el següent:
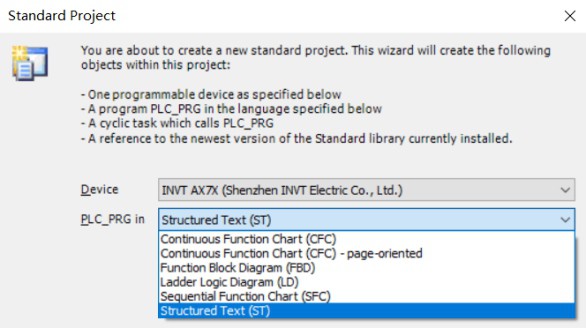
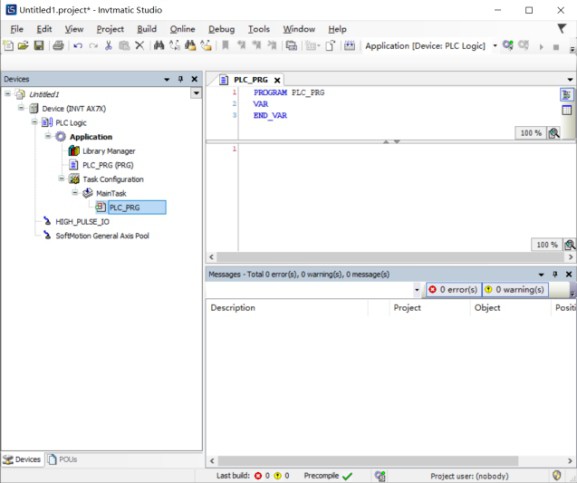
Pas 1 Trieu File > Projecte nou, seleccioneu el tipus de projecte estàndard i definiu la ubicació i el nom per desar el projecte. Feu clic a D'acord. A continuació, seleccioneu el dispositiu INVT AX7X i el llenguatge de programació de text estructurat (ST) a la finestra de configuració estàndard del projecte que apareix. Apareix la interfície de configuració i programació de CODESYS.
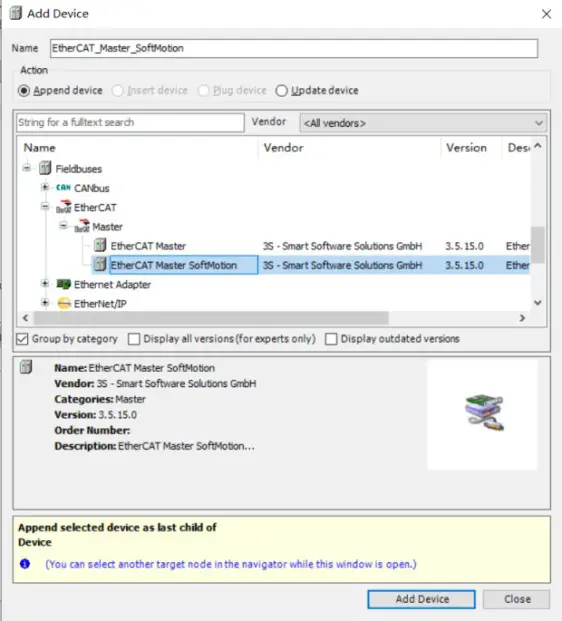
Pas 2 Feu clic amb el botó dret a l'arbre de navegació del dispositiu. A continuació, seleccioneu Afegeix un dispositiu. Trieu Ether CAT Master Soft Motion.
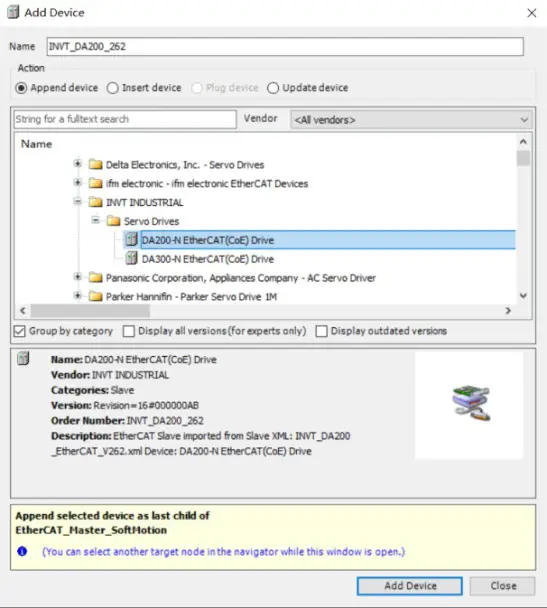
Pas 3 Feu clic amb el botó dret EtherCAT_Master_SoftMotion a l'arbre de navegació esquerre. Trieu Afegeix un dispositiu. Trieu la unitat DA200-N Ether CAT(CoE) a la finestra que apareix.
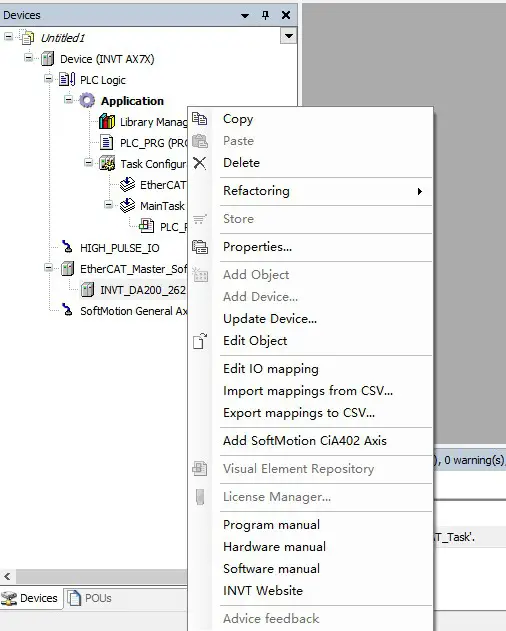
Pas 4 Trieu Afegeix l'eix SoftMotion CiA402 al menú de drecera que apareix.
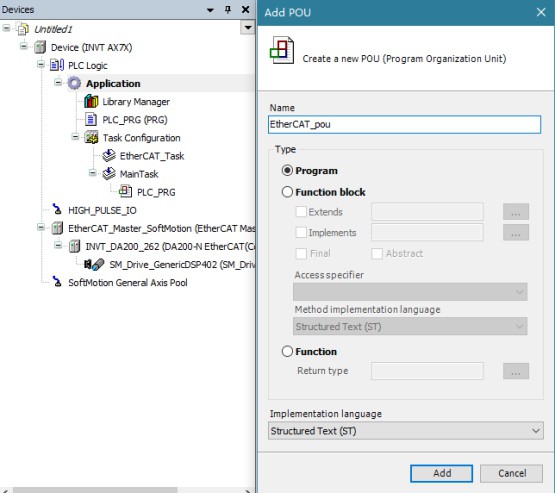
Pas 5 Feu clic amb el botó dret a Aplicació a l'arbre de navegació esquerre i trieu afegir un POU EtherCAT. Feu doble clic a l'EtherCAT_Task generat automàticament per invocar-lo. Trieu l'EtherCAT_pou creat. Escriu el programa d'aplicació en funció del procés de control de l'aplicació.
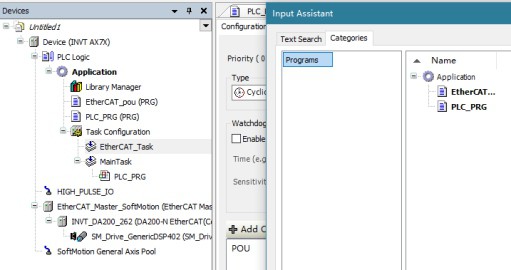
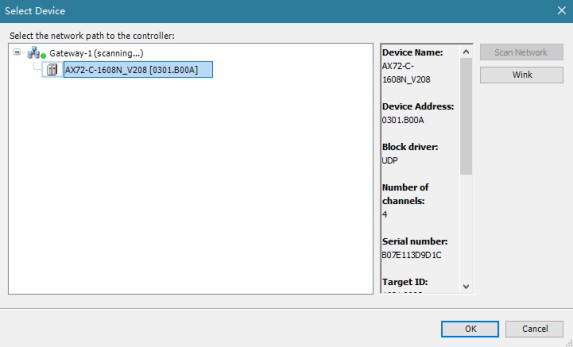
Pas 6 Feu doble clic a l'arbre de navegació del dispositiu, feu clic a Escaneja la xarxa, trieu AX72-C-1608N que es mostra a la figura següent i feu clic a l'ullet. A continuació, feu clic a D'acord quan
l'indicador del sistema de la CPU parpelleja.
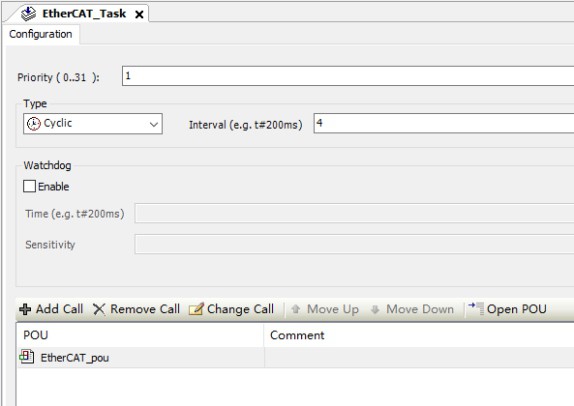
Pas 7 Feu doble clic a EtherCAT_Task a Configuració de la tasca al panell esquerre. Estableix les prioritats de les tasques i els intervals d'execució en funció dels requisits de la tasca en temps real.
A Invtmatic Studio, podeu fer clic ![]() per compilar programes, i podeu comprovar si hi ha errors segons els registres. Després de confirmar que la compilació és completament correcta, podeu fer clic
per compilar programes, i podeu comprovar si hi ha errors segons els registres. Després de confirmar que la compilació és completament correcta, podeu fer clic ![]() per iniciar sessió i descarregar programes d'usuari al controlador programable i podeu realitzar una depuració de simulació.
per iniciar sessió i descarregar programes d'usuari al controlador programable i podeu realitzar una depuració de simulació.
Comprovació prèvia a la posada en marxa i manteniment preventiu
Comprovació prèvia a la posada en marxa
Si heu completat el cablejat, assegureu-vos del següent abans de començar a treballar el mòdul:
- Els cables de sortida del mòdul compleixen els requisits.
- Les interfícies d'expansió a qualsevol nivell estan connectades de manera fiable.
- Els programes d'aplicació utilitzen els mètodes d'operació i la configuració de paràmetres correctes.
Manteniment preventiu
Realitzeu el manteniment preventiu de la següent manera:
- Netegeu el controlador programable regularment, eviteu que caiguin matèries estranyes al controlador i assegureu-vos unes bones condicions de ventilació i dissipació de calor per al controlador.
- Formular instruccions de manteniment i provar regularment el controlador.
- Comproveu regularment el cablejat i els terminals per assegurar-vos que estiguin ben fixats.
Més informació
Si us plau, no dubti en contactar amb nosaltres per obtenir més informació. Si us plau, proporcioneu el model i el número de sèrie del producte quan feu una consulta.
Per obtenir informació relacionada amb el producte o servei, podeu:
- Poseu-vos en contacte amb l'oficina local d'INVT.
- Visita www.invt.com.
- Escaneja el següent codi QR.

Centre d'atenció al client, Shenzhen INVT Electric Co., Ltd.
Adreça: INVT Guangming Technology Building, Songbai Road, Matian, Guangming District, Shenzhen, Xina
Copyright © INVT. Tots els drets reservats. La informació manual pot estar subjecta a canvis sense avís previ.

202207 (V1.0)
Documents/Recursos
 |
Mòdul CPU de la sèrie invt AX7 [pdfManual d'instruccions Mòdul de CPU de la sèrie AX7, sèrie AX7, mòdul de CPU, mòdul |



