![]()
AX7 ![]() 系列CPU模組使用手冊
系列CPU模組使用手冊
AX7系列CPU模塊
感謝您選用 AX 系列可編程控制器(簡稱可編程控制器)。
此可程式控制器基於Invtmatic Studio平台,全面支援IEC61131-3編程系統、EtherCAT即時現場匯流排、CANopen現場匯流排和高速端口,並提供電子凸輪、電子齒輪和插補功能。
本手冊主要描述了可程式控制器 CPU 模組的規格、特性、接線和使用方法。為確保您安全、正確地使用本產品並充分發揮其性能,請在安裝前仔細閱讀本說明書。有關用戶程式開發環境和用戶程式設計方法的詳細信息,請參見我們發行的《AX 系列可編程控制器硬體用戶手冊》和《AX 系列可編程控制器軟體用戶手冊》。
本手冊如有更改,恕不另行通知。 請拜訪 http://www.invt.com 下載最新的手冊版本。
安全注意事項
警告
| 象徵 | 姓名 | 描述 | 縮寫 |
| 危險 |
危險 | 如果不遵守相關要求,可能會導致嚴重的人身傷害甚至死亡。 | |
| 警告 |
警告 | 如果不遵守相關要求,可能會導致人身傷害或設備損壞。 |
送貨及安裝
| • 只允許經過培訓的合格專業人員進行安裝、接線、維護和檢查。 • 不要將可編程控制器安裝在易燃物上。 另外,請防止可編程控制器接觸或附著易燃物。 • 將可編程控制器安裝在防護等級至少為IP20的可上鎖控制櫃內,防止不具備電氣設備相關知識的人員誤觸,誤觸可能導致設備損壞或觸電。 只有接受過相關電氣知識和設備操作培訓的人員才能操作控制櫃。 • 不要運行損壞或不完整的可編程控制器。 • 不要用 d 接觸可編程控制器amp 物體或身體部位。 否則,可能會導致觸電。 |
電纜選擇
| • 只允許經過培訓的合格專業人員進行安裝、接線、維護和檢查。 • 接線前充分了解接口類型、規格及相關要求。 否則,接線錯誤會導致 運行異常。 • 在進行接線之前,切斷所有連接到可編程控制器的電源。 • 安裝接線完成後,在上電運轉前,請確保各模組端子蓋均安裝到位。這可以防止帶電終端被觸摸。否則可能會導致人身傷害、設備故障或誤動作。 • 當可程式控制器使用外部電源時,請安裝適當的保護元件或裝置。這樣可以防止因外部電源故障、過壓等原因而損壞可程式控制器。tage、過流或其他異常。 |
調試運行
| • 上電運行前,確保可編程控制器的工作環境符合要求,接線正確,輸入電源規格符合要求,並設計了保護電路對可編程控制器進行保護,使可編程控制器工作正常。即使出現外部設備故障,控制器也能安全運行。 • 對於需要外接電源的模塊或終端,配置保險絲或斷路器等外接安全裝置,防止因外接電源或設備故障造成損壞。 |
維護和部件更換
| • 只有經過培訓的合格專業人員才可以對設備進行維護、檢查和部件更換。 可編程控制器。 • 在端子接線前,切斷所有連接到可編程控制器的電源。 • 在維護和更換部件時,應採取措施防止螺釘、電纜和其他導電物質掉入可編程控制器內部。 |
處理
| 可編程控制器含有重金屬。 報廢的可編程控制器作為工業廢棄物處理。 | |
| 在適當的收集點單獨處理廢品,但不要將其放入正常的廢物流中。 |
產品介紹
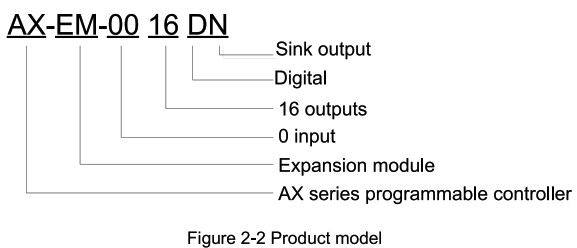
型號及銘牌
功能結束view
AX7J-C-1608L】CPU模組(簡稱CPU模組)作為可程式控制器的主控模組,具有以下功能:
- 實現系統運作的控制、監視、資料處理和網路通訊。
- 採用英威騰推出的Invtmatic Studio平台進行編程,支援符合IEC61131-3標準的IL、ST、FBD、LD、CFC、SFC程式語言。
- 支援16個本地擴展模組(如I/O、溫度、類比量模組)。
- 採用Ether CAT或CAN open匯流排連接從站模組,每個從站模組支援16個擴充模組(如I/O、溫度、類比量模組)。
- 支援Modbus TCP主/從協定。
- 整合485個RSXNUMX接口,支援Modbus RTU主/從協定。
- 支援高速I/O,16路高速輸入和8路高速輸出。
- 支援EtherCAT現場匯流排運動控制,同步時間為1ms、2ms、4ms、8ms。
- 支援基於脈衝的單軸或多軸運動控制,包括2-4軸直線插補和2軸圓弧插補。
- 支援實時時鐘。
- 支援掉電資料保護。
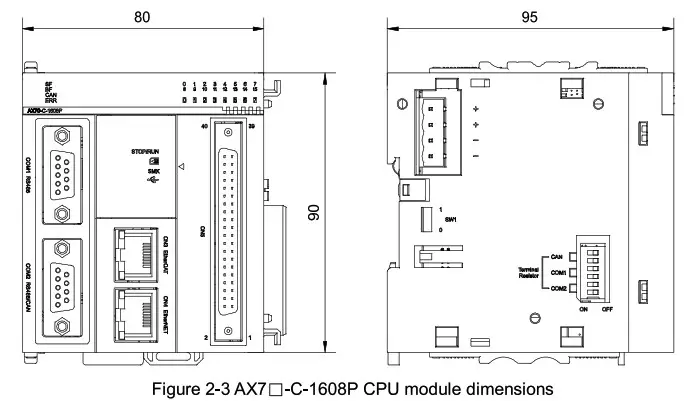
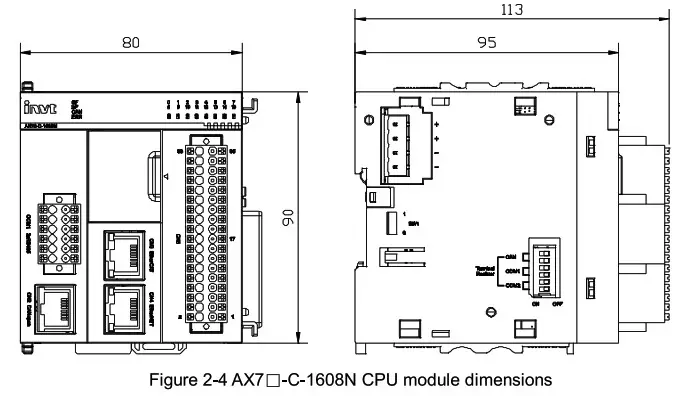
結構尺寸
結構尺寸(單位:mm)如下圖所示。
介面
介面說明
接口分佈
CPU 模組介面分佈如圖 3-1 及圖 3-2 所示。每個介面附近都有對應的絲網印刷說明,方便接線、操作和檢查。
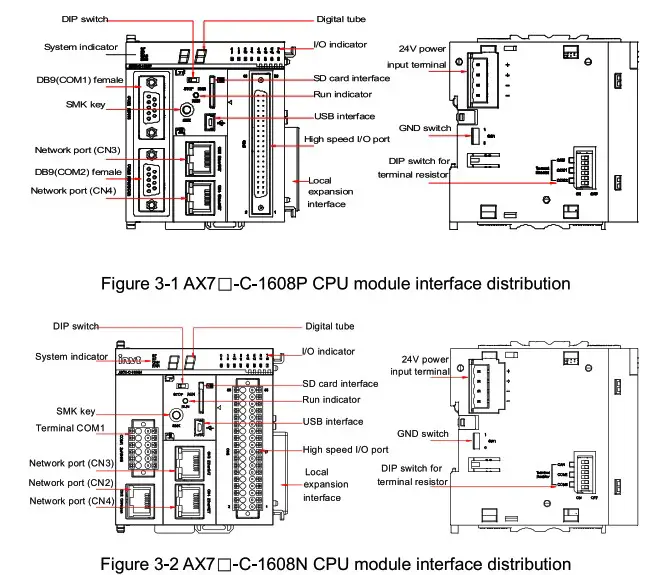
| 介面 | 功能 | |
| 撥碼開關 | 運轉/停止 DIP 開關。 | |
| 系統指示燈 | SF:系統故障指示燈。 BF:匯流排故障指示燈。 CAN:CAN總線故障指示燈。 ERR:模組故障指示燈。 |
|
| SMK金鑰 | SMK 智慧鑰匙。 | |
| WO-C-1608P | 通訊口1 (DB9) 女 |
485個RSXNUMX接口,支援Modbus RTU 主/從協議。 |
| 通訊口2 (DB9) 女 |
485個RSXNUMX接口,XNUMX個CAN接口 RS485介面支援Modbus RTU主/從協議,另一個CAN介面支援CANopen主/從協議。 |
|
| AX70-C-1608N | COM1&COM2(直插式n端子) | 兩個RS485接口,支援Modbus RTU 主/從協議。 |
| CN2 (RJ45) | CAN接口,支援CAN open主/從協定。 | |
| CN3 (RJ45) | 乙太網路CAT介面 | |
| CN4 (RJ45) | 1.Modbus TCP協定 2.標準乙太網路功能 3.用戶程式下載與調試(僅限IPv4) |
|
| 數碼管 | 顯示警報並響應 SMK 按鍵。 | |
| 輸入輸出指示燈 | 指示16路輸入、8路輸出訊號是否有效。 | |
| SD卡接口 | 用於儲存用戶程式和資料。 | |
| 運行指示燈 | 指示CPU模組是否正在運作。 | |
| USB介面 | 用於下載和調試程式。 | |
| 高速輸入輸出 | 16 個高速輸入和 8 個高速輸出。 | |
| 本機擴充介面 | 支援擴充16個I/O模組,不可熱插拔。 | |
| 24V電源接口 | 直流 24V 音量tag輸入 | |
| 接地開關 | 系統內部數位地和外殼接地之間的連接開關。預設斷開(SW1 設定為 0)。僅用於以系統內部數位地為參考面的特殊場景。操作前請務必小心。否則會影響系統穩定性。 | |
| 終端電阻撥碼開關 | ON表示連接終端電阻(預設為OFF)。 COM1對應RS485-1,COM2對應RS485-2,CAN對應CAN。 | |
SMK金鑰
SMK 鍵主要用於CPU 模組IP 位址(rP) 的重設、應用程式(cA) 的清除。預設 CPU 模組位址為 192.168.1.10。如果您想將修改後的IP位址還原為預設位址,可以透過SMK金鑰恢復預設位址。方法如下:
- 將CPU模組設為STOP狀態。按 SMK 鍵。當數位管顯示“rP”時,按住SMK鍵。此時數碼管顯示「rP」並交替熄滅,表示正在進行IP 位址重設。當數碼管常滅時復歸操作成功。此時若放開SMK鍵,數位管顯示「rP」。按住 SMK 鍵至顯示管顯示「00」(rP—cA—rU-rP)。
- 如果在數位管顯示「rP」和熄滅的過程中放開SMK鍵,則取消IP位址重設操作,數位管顯示「rP」。
若要清除 CPU 模組中的程序,請執行下列操作:
按 SMK 鍵。當數碼管顯示“cA”時,按住SMK鍵。此時數碼管顯示「rP」並交替熄滅,表示程式正在清除。當數碼管常滅後,重新啟動CPU模組。程序清除成功。
數碼管說明
- 如果程式下載後沒有問題,則CPU模組的數位管穩定顯示「00」。
- 如果程式發生故障,數位管會閃爍顯示故障訊息。
- 對於前amp即,若僅出現19號故障,則數碼管顯示「19」並交替熄滅。若故障19和故障29同時出現,數碼管顯示「19」、熄滅、顯示「29」、熄滅,交替出現。如果同時出現多個故障,則顯示方式類似。
端子定義
AX7![]() -C-1608P COM1/COM2通訊端子定義
-C-1608P COM1/COM2通訊端子定義
對於AX7LJ-C-1608P CPU模組,COM1為RS485通訊端子,COM2為RS485/CAN通訊端子,兩者皆使用DB9連接器進行資料傳輸。下面介紹其介面和管腳。
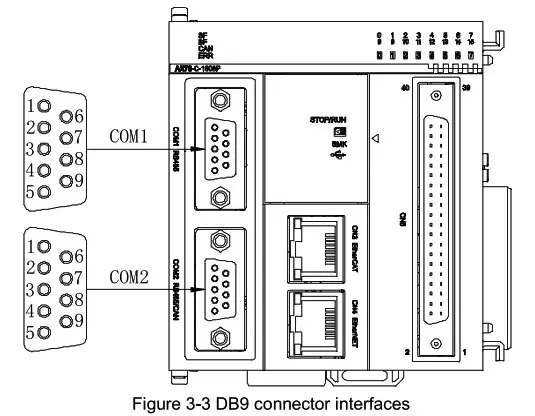
表 3-1 COM1/COM2 DB39 連接器接腳
| 介面 | 分配 | 別針 | 定義 | 功能 |
| 通訊口1 (RS485) |
1 | / | / | |
| 2 | / | / | ||
| 3 | / | / | ||
| 4 | RS485A | RS485差分信號+ | ||
| 5 | RS485B | RS485 差分信號 – | ||
| 6 | / | / | ||
| 7 | / | / | ||
| 8 | / | / | ||
| 9 | 地線_RS485 | RS485電源地 | ||
| 通訊口2 (RS485/CAN) |
1 | / | / | |
| 2 | 可以_L | CAN 差分訊號 – | ||
| 3 | / | / | ||
| 4 | RS485A | RS485差分信號+ | ||
| 5 | RS485B | RS485 差分信號 – | ||
| 6 | 地線_CAN | CAN電源地 | ||
| 7 | CAN_H | CAN差分訊號+ | ||
| 8 | / | / | ||
| 9 | 地線_RS485 | RS485電源地 |
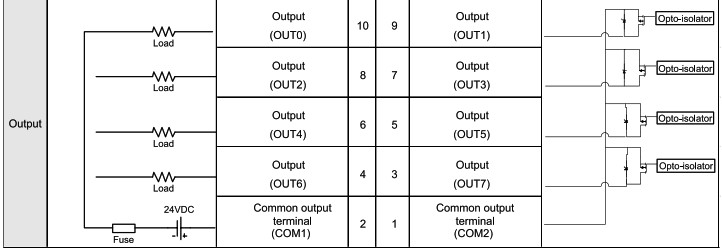
AX7![]() -C-1608P高速I/O端子定義
-C-1608P高速I/O端子定義
AX7![]() -C-1608P CPU模組具有16個高速輸入和8個高速輸出。下面介紹其介面和管腳。
-C-1608P CPU模組具有16個高速輸入和8個高速輸出。下面介紹其介面和管腳。
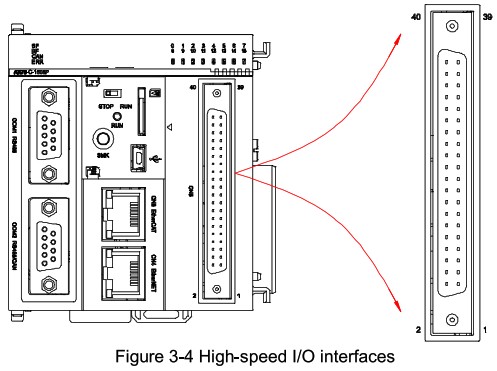
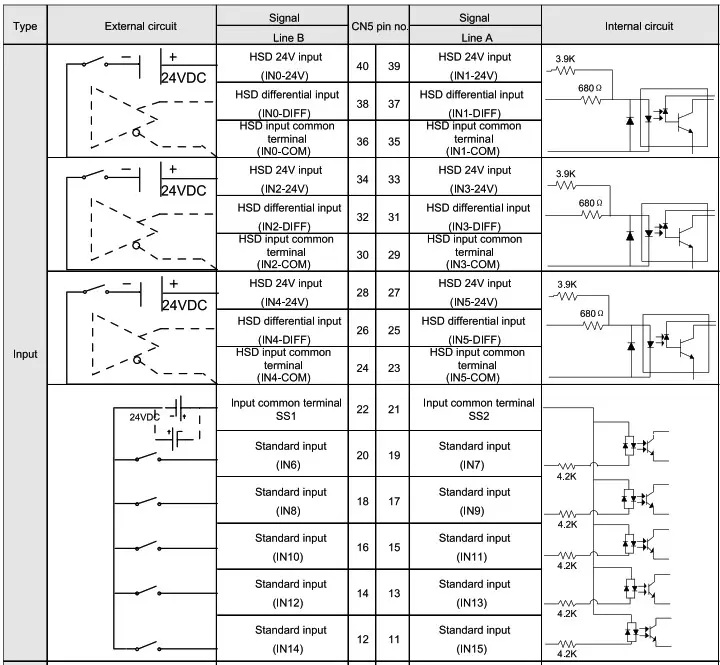
表 3-2 高速 I/O 接腳
AX7![]() -C-1608N COM1/CN2通訊端子定義
-C-1608N COM1/CN2通訊端子定義
適用於 AX7![]() -C-1608N CPU模組,COM1為兩路RS485通訊端子,採用12針推入式連接器進行資料傳輸。 CN2為CAN通訊端子,採用RJ45連接器進行資料傳輸。下面介紹其介面和管腳。
-C-1608N CPU模組,COM1為兩路RS485通訊端子,採用12針推入式連接器進行資料傳輸。 CN2為CAN通訊端子,採用RJ45連接器進行資料傳輸。下面介紹其介面和管腳。

表 3-3 COM1/CN2 連接器接腳
| COM1 的直插式端子功能 | ||||
| 定義 | 功能 | 別針 | ||
| 串口1 RS485 | A | RS485差分訊號 + |
12 | |
| B | RS485 差分信號 – | 10 | ||
| 接地 | RS485_1晶片電源 地面 |
8 | ||
| PE | 屏蔽接地 | 6 | ||
| 串口2 RS485 | A | RS485差分訊號 + |
11 | |
| B | RS485 差分信號 – | 9 | ||
| 接地 | RS485_2晶片電源 地面 |
7 | ||
| PE | 屏蔽接地 | 5 | ||
| 注意:引腳 1-4 未使用。 | ||||
| CN2腳位功能 | ||||
| 定義 | 功能 | 別針 | ||
| 的CANopen | 接地 | CAN電源地 | 1 | |
| CAN_L | CAN 差分訊號 – | 7 | ||
| CAN_H | CAN差分訊號+ | 8 | ||
| 注意:引腳 2-6 未使用。 | ||||
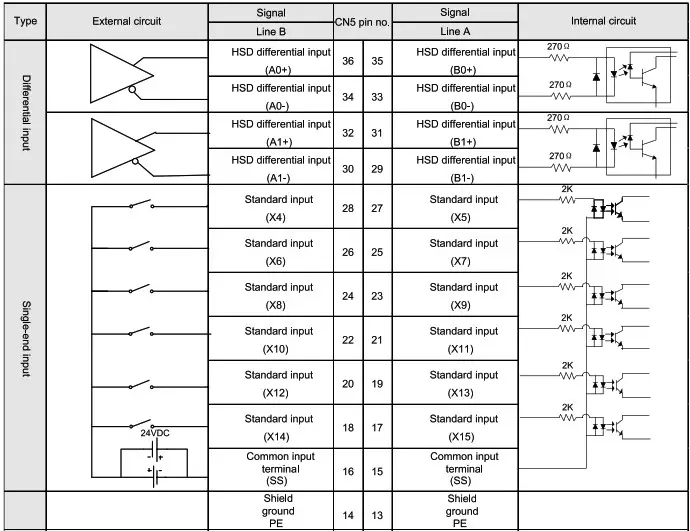
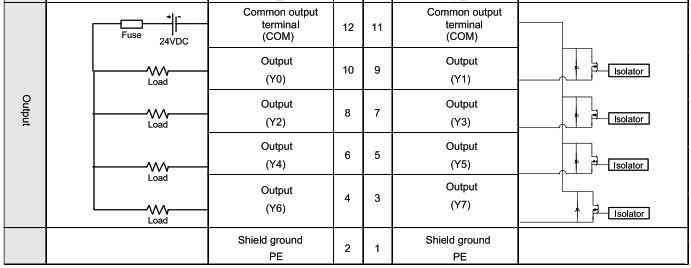
AX7![]() -C-1608N高速I/O端子定義
-C-1608N高速I/O端子定義
AX7![]() 1-C-1608N CPU模組具有16個高速輸入和8個高速輸出。端子分佈如下圖,腳位列表如下:
1-C-1608N CPU模組具有16個高速輸入和8個高速輸出。端子分佈如下圖,腳位列表如下:
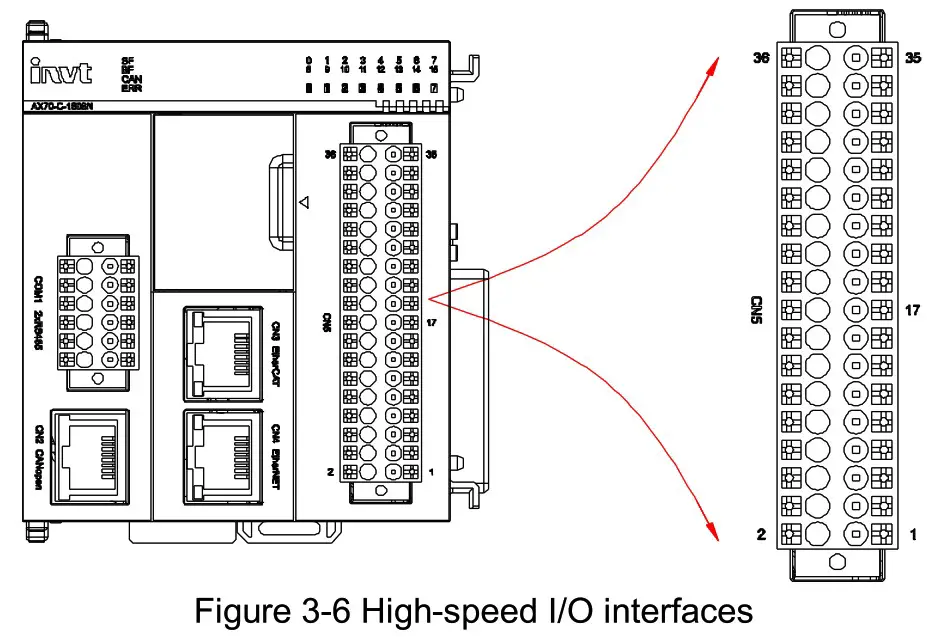
表 3-4 高速 I/O 接腳
筆記:
- AX16的全部7個輸入通道
 -C-1608P CPU模組允許高速輸入,但前6通道支援24V單端或差分輸入,後10通道支援24V單端輸入。
-C-1608P CPU模組允許高速輸入,但前6通道支援24V單端或差分輸入,後10通道支援24V單端輸入。 - AX16的全部7個輸入通道-C-1608N CPU模組允許高速輸入,但前4通道支援差分輸入,後12通道支援24V單端輸入。
- 每個I/O點與內部電路隔離。
- 高速I/O口連接電纜總長度不能超過3公尺。
- 緊固電纜時請勿彎曲電纜。
- 走線時,應將連接線與強幹擾的大功率線纜分開,但不要將連接線與高功率線纜捆綁在一起。另外,避免長距離並行路由。
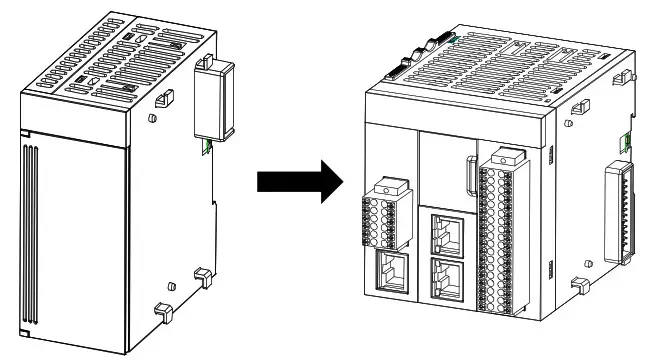
模塊安裝
可程式控制器採用模組化設計,易於安裝和維護。對CPU模組來說,主要的連接對像是電源模組和擴充模組。
模塊之間通過模塊提供的連接接口和卡扣連接。
安裝過程如下:
| 步驟 1 按下圖所示方向滑動 CPU 模組上的卡扣(使用電源模組 前任的連接ample)。 |
步驟2 將CPU 模組與電源模組連接器對齊,進行連鎖。 |
 |
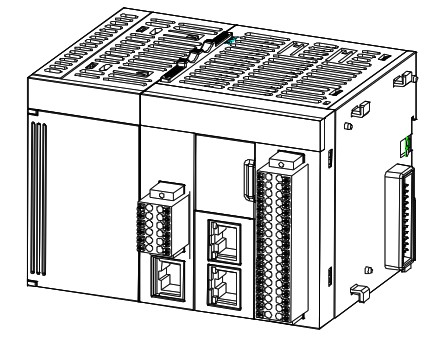 |
| 步驟3 按下圖所示方向滑動CPU模組上的卡扣,將兩個模組連接並鎖緊。 | 第 4 步 對於標準 DIN 導軌安裝,將相應模塊掛入標準安裝導軌,直至卡扣卡入到位。 |
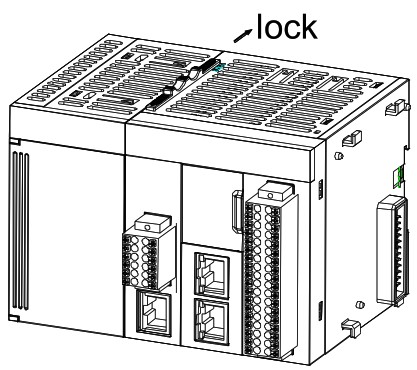 |
 |
電纜連接及規格
乙太網路CAT總線連接
Ether CAT 總線規格
| 物品 | 描述 |
| 通訊協議 | 以太貓 |
| 支援的服務 | COE(PDO/SDO) |
| 分鐘。同步間隔 | 1ms/4軸(典型值) |
| 同步方式 | DC 用於同步/DC 未使用 |
| 物理層 | 100BASE-TX |
| 雙工模式 | 全雙工 |
| 拓樸結構 | 序列連接 |
| 傳輸介質 | 網路線(請參閱「網路線選擇」一節) |
| 傳輸距離 | 兩個節點之間的距離小於100m |
| 從節點數量 | 最多 125 個 |
| 乙太網路CAT幀長度 | 44字節-1498字節 |
| 處理數據 | 單幀最多包含 1486 個位元組 |
電纜選擇
CPU模組可以透過CN3埠實現Ether CAT匯流排通訊。推薦使用英威騰標準電纜。如果您自行製作通訊電纜,請確保電纜符合以下要求:
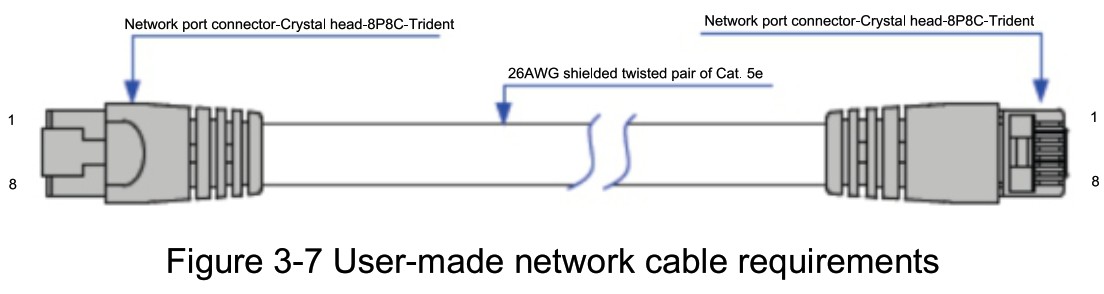
筆記:
- 您使用的通訊電纜必須100%通過導電率測試,無短路、斷路、錯位、接觸不良等現象。
- 為確保通訊質量,EtherCAT通訊電纜長度不能超過100公尺。
- 通訊電纜建議使用5e類屏蔽雙絞線,符合EIA/TIA568A、EN50173、ISO/IEC11801、EIA/TIA公告TSB、EIA/TIA SB40-A&TSB36標準。
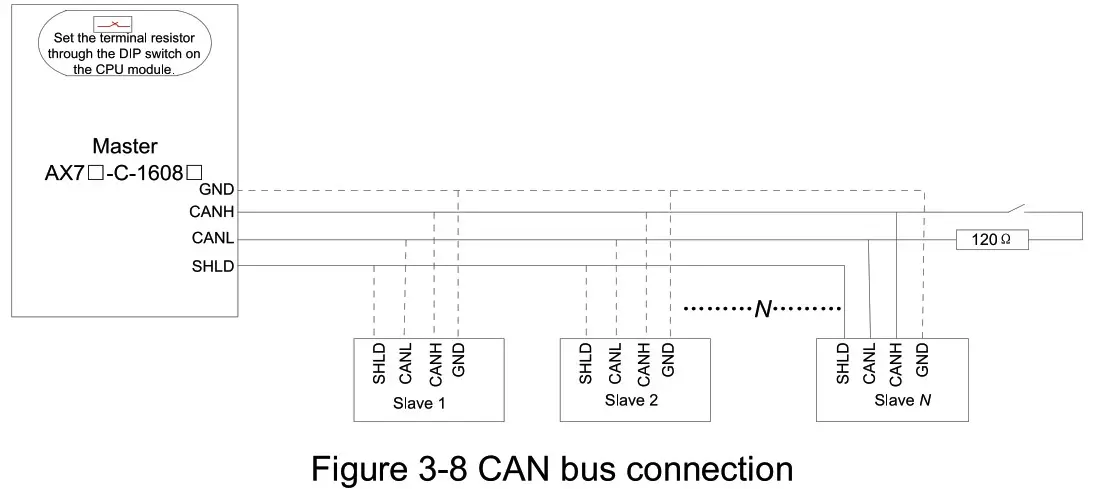
CAN 開放式電纜連接
聯網
CAN總線連接拓樸結構如下圖所示。 CAN 總線連接建議使用屏蔽雙絞線。 CAN匯流排的每一端都連接一個1200Ω的終端電阻,以防止訊號反射。大多數情況下,屏蔽層採用單點接地。
電纜選擇
- 適用於 AX7-C-1608P CPU模組,同一個端子同時用於CANopen通訊和RS485通信,使用DB9連接器進行資料傳輸。 DB9 連接器中的引腳已在前面描述過。
- 適用於 AX71-C-1608N CPU模組,RJ45端子用於CANopen通訊進行資料傳輸。 RJ45 連接器中的引腳已在前面描述過。
推薦使用英威騰標準電纜。如果您自行製作通訊電纜,請按照腳位說明製作電纜,並確保製造流程和技術參數符合通訊要求。
筆記:
- 為了增強電纜的抗干擾能力,建議在製作電纜時採用鋁箔屏蔽和鋁鎂編織屏蔽技術。
- 對差分電纜使用雙絞線纏繞技術。
RS485串行通訊連接
CPU模組支援2路RS485通訊。
- 適用於 AX7-C-1608P CPU模組,COM1、COM2埠採用DB9連接器進行資料傳輸。 DB9 連接器中的引腳已在前面描述過。
- 適用於 AX7-C-1608N CPU模組,連接埠採用12針推入式端子連接器進行資料傳輸。前面已經描述了終端連接器中的引腳。
推薦使用英威騰標準電纜。如果您自行製作通訊電纜,請按照腳位說明製作電纜,並確保製造流程和技術參數符合通訊要求。
筆記:
- 為了增強電纜的抗干擾能力,建議在製作電纜時採用鋁箔屏蔽和鋁鎂編織屏蔽技術。
- 對差分電纜使用雙絞線纏繞技術。
乙太網路連接
聯網
CPU 模組的乙太網路連接埠為 CN4,可透過網路線以點對點的方式連接到其他設備,例如電腦或 HMI 設備。
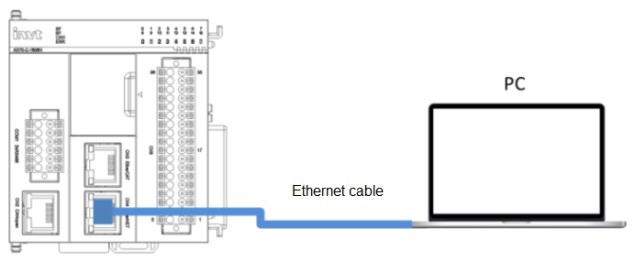
圖3-9 乙太網路連接
您也可以透過網路線將乙太網路連接埠連接到集線器或交換機,以實現多點連接。

圖3-10乙太網路組網
電纜選擇
為了提高通訊可靠性,乙太網路電纜請使用5類以上屏蔽雙絞線。推薦使用英威騰標準電纜。
使用說明
技術參數
CPU模組一般規格
| 物品 | 描述 | |||||
| 輸入音量tage | 24VDC | |||||
| 耗電量 | <15W | |||||
| 電源(偵測)失敗 保護時間 |
300ms(上電20秒內無保護) | |||||
| 的備用電池 實時時鐘 |
支援 | |||||
| 背板總線電源 供應 |
5V/2.5A | |||||
| 編程方式 | IEC 61131-3 程式語言(LD、FBD、IL、ST、SFC、 和氟氯化碳) |
|||||
| 程式執行 方法 |
本地線上 | |||||
| 使用者程式存儲 空間 |
10MB | |||||
| 快閃記憶體空間 停電時 保護 |
512KB | |||||
| SD卡 規格 |
32G 記憶卡 | |||||
| 軟元素和 特徵 |
||||||
| 元素 | 姓名 | 數數 | 儲存特性 | |||
| 預設 | 可寫 | 描述 | ||||
| I | 輸入繼電器 | 64K字 | 不保存 | 不 | X:1 位元 B.8 位元 W:16 位元 D:32 位元 L:64 位元 | |
| Q | 輸出繼電器 | 64K字 | 不保存 | 不 | ||
| M | 輔助輸出 | 256K字 | 節省 | 是的 | ||
| 程序保留 權力方法 失敗 |
透過內部閃光燈保持 | |||||
| 中斷模式 | CPU模組的高速DI訊號可設定為中斷輸入,最多允許8點輸入,並且可以設定上升沿和下降沿中斷模式。 | |||||
高速I/O規格
高速輸入規格
| 物品 | 規格 | |
| 訊號名稱 | 高速差分輸入 | 高速單端輸入 |
| 額定輸入 卷tage |
2.5V | 24VDC(-15% — +20%,脈動 5%以內) |
| 額定輸入 目前的 |
6.8毫安 | 5.7mA(典型值)(24V DC 時) |
| 導通電流 | / | 小於2mA |
| 關斷電流 | / | 小於1mA |
| 輸入電阻 | 5400 | 2.2k0 |
| 最大限度。計數 速度 |
800K Pulses/s(2PH四倍頻),200kHz(單聲道輸入) | |
| 2PH 輸入佔空比 比率 |
40%。 60% | |
| 公共端子 | / | 使用一個公共端子。 |
高速輸出規格
| 物品 | 規格 |
| 訊號名稱 | 輸出(YO—Y7) |
| 輸出極性 | AX7 AX7 |
| 控制電路容量tage | 直流5V-24V |
| 額定負載電流 | 100mA/點,1A/COM |
| 最大限度。 卷tage 下降至 ON | 0.2V(典型值) |
| OFF 時漏電流 | 小於0.1mA |
| 輸出頻率 | 200kHz(200kHz輸出要求外接等效負載大於12mA) |
| 公共端子 | 每八點使用一個公共端子。 |
筆記:
- 高速I/O埠對允許的頻率有限制。如果輸入或輸出頻率超過允許值,控制和識別可能會出現異常。正確排列 I/O 連接埠。
- 高速差壓輸入介面不接受大於7V的差壓輸入電平。否則可能會損壞輸入電路。
程式設計軟體介紹及下載
程式設計軟體介紹
INVTMATIC Studio是英威騰開發的可程式控制器程式設計軟體。它基於符合IEC 61131-3的程式語言,為專案開發提供了一個技術先進、功能強大的開放式、完全整合的程式開發環境。廣泛應用於能源、交通、市政、冶金、化工、製藥、食品、紡織、包裝、印刷、橡實、工具機及類似產業。
運行環境及下載
您可以在桌上型電腦或可攜式電腦上安裝Invtmatic Studio,作業系統至少為Windows 7,記憶體空間至少為2GB,可用硬體空間至少為10GB,CPU主頻高於2GHz。然後您可以透過網路線將電腦連接到可程式控制器的CPU模組,並透過Invtmatic Studio軟體編輯使用者程序,以便下載和偵錯使用者程式。
程式設計實例
以下介紹如何使用ex進行程式設計amp樂(AX72-C-1608N)。
首先連接好可程式控制器的所有硬體模組,包括將電源連接到CPU模組,將CPU模組連接到已安裝Invtmatic Studio的電腦和所需的擴充模組,將EtherCAT匯流排連接到馬達驅動。啟動Invtmatic Studio建立工程並進行程式設定。
程序如下:
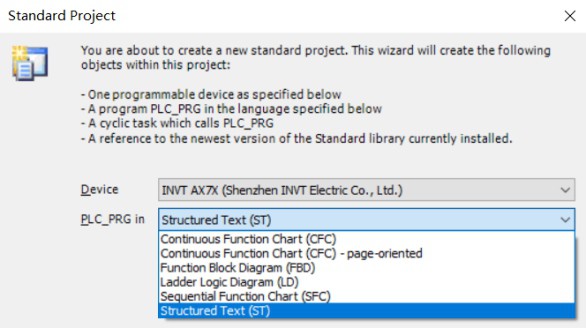
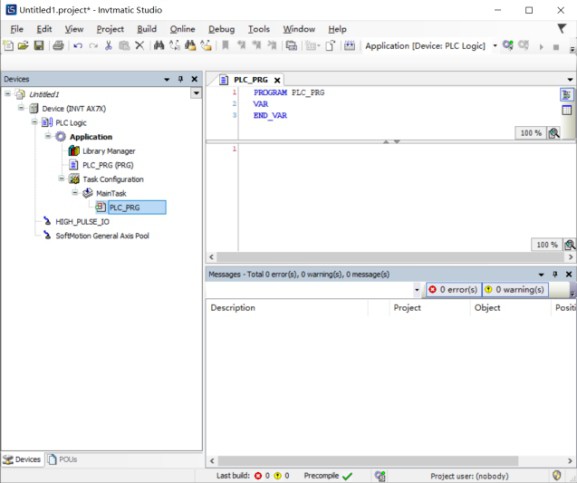
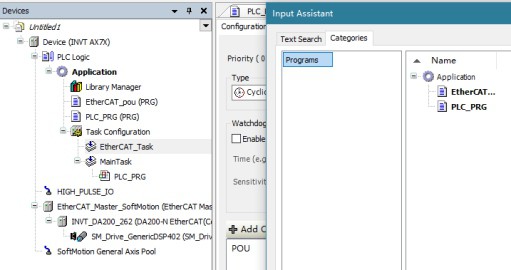
步驟1選擇 File > 新建項目,選擇標準項目類型,並設定項目儲存位置和名稱。按一下“確定”。然後在出現的標準項目配置視窗中選擇 INVT AX7X 設備和結構化文字 (ST) 程式語言。 CODESYS 配置和編程介面出現。
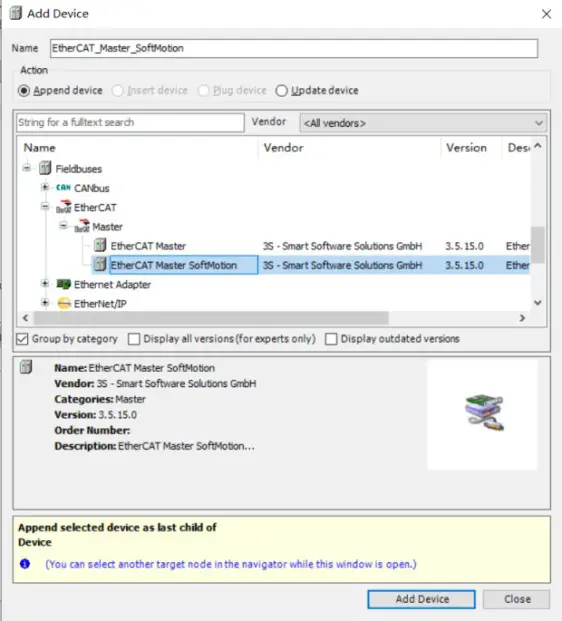
步驟2 右鍵點選「裝置」導覽樹。然後選擇新增設備。選擇 Ether CAT Master 軟運動。
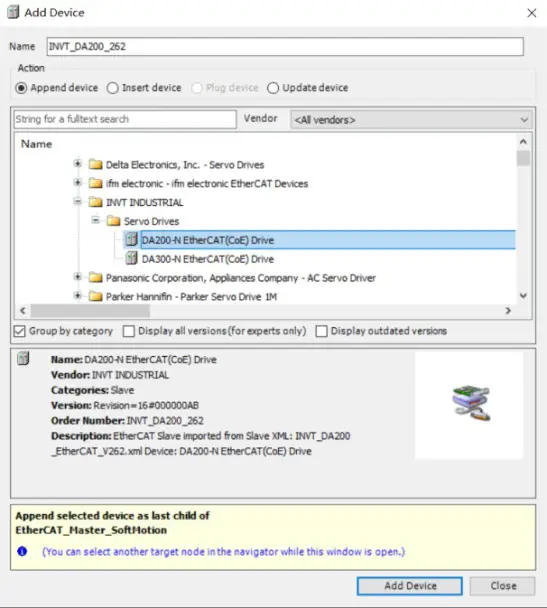
步驟 3 右鍵單擊 EtherCAT_Master_SoftMotion 在左側導覽樹上。選擇新增設備。在出現的視窗中選擇 DA200-N Ether CAT(CoE) Drive。
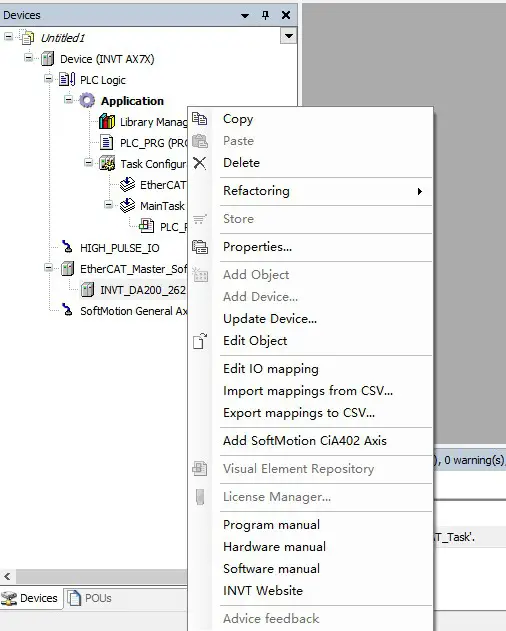
步驟 4 在出現的快速選單中選擇「新增 SoftMotion CiA402 軸」。
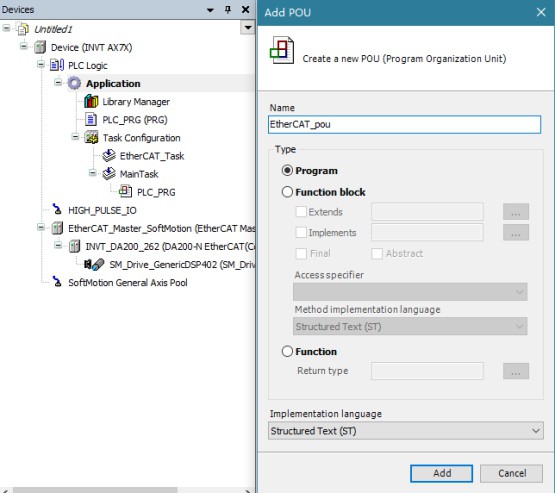
步驟5 右鍵單擊左側導覽樹中的“應用程式”,選擇新增EtherCAT POU。雙擊自動產生的EtherCAT_Task進行呼叫。選擇已建立的EtherCAT_pou。根據應用程式控制流程編寫應用程式。
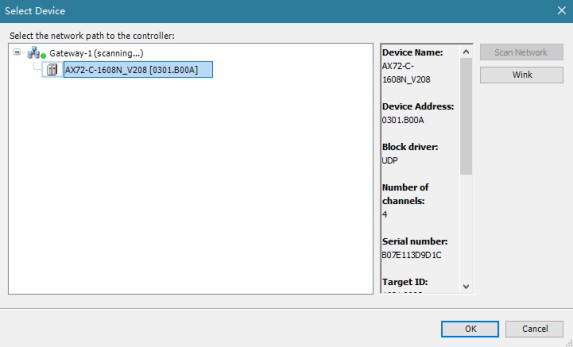
步驟6 雙擊“設備”導覽樹,點選“掃描網路”,選擇下圖所示的“AX72-C-1608N”,點選“眨眼”。然後按一下“確定”時
CPU系統指示燈閃爍。
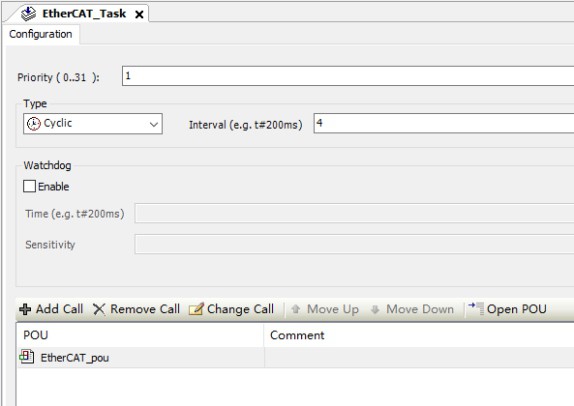
步驟7 雙擊左側「任務配置」下的「EtherCAT_Task」。根據任務即時性要求設定任務優先順序和執行間隔。
在 Invtmatic Studio 中,您可以按一下 ![]() 編譯程序,可以根據日誌檢查是否有錯誤。確認編譯完全正確後,可以點選
編譯程序,可以根據日誌檢查是否有錯誤。確認編譯完全正確後,可以點選 ![]() 登入並下載使用者程式到可程式控制器中,即可進行仿真偵錯。
登入並下載使用者程式到可程式控制器中,即可進行仿真偵錯。
啟動前檢查和預防性維護
啟動前檢查
如果您已完成接線,請確保在啟動模塊工作之前滿足以下條件:
- 模塊輸出線纜符合要求。
- 各級擴展接口可靠連接。
- 應用程序使用正確的操作方法和參數設置。
預防性維護
執行預防性維護,如下所示:
- 定期對可編程控制器進行清潔,防止異物落入控制器內,保證控制器良好的通風散熱條件。
- 制定維護保養說明,定期對控制器進行檢測。
- 定期檢查接線和端子,確保它們牢固固定。
更多資訊
請隨時聯繫我們獲取更多信息。 詢價時請提供產品型號和序列號。
要獲取相關產品或服務信息,您可以:
- 聯繫英威騰當地辦事處。
- 訪問 www.invt.com.
- 掃描以下二維碼。

深圳市英威騰電氣有限公司客戶服務中心
地址:深圳市光明區馬田松白路英威騰光明科技大廈
版權所有 © 英威騰。 版權所有。 手冊信息如有更改,恕不另行通知。

202207(V1.0)
文件/資源
 |
英威騰AX7系列CPU模組 [pdf] 使用說明書 AX7系列CPU模組, AX7系列, CPU模組, 模組 |



