![]()
AX7 ![]() Manual de usuario del módulo CPU serie
Manual de usuario del módulo CPU serie
Módulo CPU Serie AX7
Grazas por escoller o controlador programable da serie AX (controlador programable para abreviar).
Baseado na plataforma Invtmatic Studio, o controlador programable é totalmente compatible con sistemas de programación IEC61131-3, bus de campo en tempo real EtherCAT, bus de campo CANopen e portos de alta velocidade, e ofrece funcións de cámara electrónica, engrenaxe electrónica e interpolación.
O manual describe principalmente as especificacións, características, cableado e métodos de uso do módulo CPU do controlador programable. Para asegurarse de que utiliza o produto de forma segura e axeitada e poñelo en funcionamento, lea atentamente o manual antes da instalación. Para obter máis información sobre os contornos de desenvolvemento de programas de usuario e os métodos de deseño de programas de usuario, consulte o Manual de usuario do hardware de controladores programables da serie AX e o Manual de usuario do software de controladores programables da serie AX que publicamos.
O manual está suxeito a cambios sen previo aviso. Por favor visite http://www.invt.com para descargar a última versión do manual.
Precaucións de seguridade
Aviso
| Símbolo | Nome | Descrición | Abreviatura |
| Perigo |
Perigo | Se non se cumpren os requisitos relacionados, poden producirse danos persoais graves ou mesmo a morte. | |
| Aviso |
Aviso | Se non se cumpren os requisitos relacionados, poden producirse danos persoais ou equipos. |
Entrega e instalación
| • Só os profesionais adestrados e cualificados están autorizados a realizar a instalación, o cableado, o mantemento e a inspección. • Non instale o controlador programable en combustibles inflamables. Ademais, evite que o controlador programable entre en contacto ou se adhira aos inflamables. • Instale o controlador programable nun armario de control con pechadura de polo menos IP20, o que evita que o persoal sen coñecementos relacionados cos equipos eléctricos o toque por erro, xa que o erro pode producir danos no equipo ou descarga eléctrica. Só o persoal que teña recibido coñecementos relacionados coa electricidade e formación sobre o funcionamento dos equipos pode operar o armario de control. • Non execute o controlador programable se está danado ou está incompleto. • Non contacte o controlador programable con damp obxectos ou partes do corpo. En caso contrario, pode producirse unha descarga eléctrica. |
Selección de cable
| • Só os profesionais adestrados e cualificados están autorizados a realizar a instalación, o cableado, o mantemento e a inspección. • Comprender completamente os tipos de interfaces, as especificacións e os requisitos relacionados antes da conexión. En caso contrario, provocará un cableado incorrecto marcha anormal. • Corte todas as fontes de alimentación conectadas ao controlador programable antes de realizar o cableado. • Antes de acender para funcionar, asegúrese de que cada tapa de terminales do módulo está instalada correctamente no seu lugar despois de completar a instalación e o cableado. Isto evita que se toque un terminal en directo. En caso contrario, poden producirse lesións físicas, avarías do equipo ou fallos de funcionamento. • Instale compoñentes ou dispositivos de protección adecuados cando se utilicen fontes de alimentación externas para o controlador programable. Isto evita que o controlador programable sexa danado debido a fallos da fonte de alimentación externa, sobrevoltage, sobreintensidade ou outras excepcións. |
Posta en marcha e funcionamento
| • Antes de acendelo para funcionar, asegúrese de que o ambiente de traballo do controlador programable cumpra os requisitos, que o cableado sexa correcto, que as especificacións de potencia de entrada cumpran os requisitos e que se deseñou un circuíto de protección para protexer o controlador programable para que o programable o controlador pode funcionar con seguridade aínda que se produza un fallo do dispositivo externo. • Para os módulos ou terminais que requiran alimentación externa, configure dispositivos de seguridade externos, como fusibles ou interruptores automáticos, para evitar danos causados pola fonte de alimentación externa ou por fallos do dispositivo. |
Mantemento e substitución de compoñentes
| • Só os profesionais adestrados e cualificados poden realizar mantemento, inspección e substitución de compoñentes para o controlador programable. • Desconecte todas as fontes de alimentación conectadas ao controlador programable antes do cableado do terminal. • Durante o mantemento e a substitución de compoñentes, tome medidas para evitar que parafusos, cables e outros elementos condutores caian no interior do controlador programable. |
Eliminación
| O controlador programable contén metais pesados. Eliminar un controlador programable de chatarra como residuos industriais. | |
| Eliminar un produto de refugallo por separado nun punto de recollida apropiado pero non colocalo no fluxo de residuos normal. |
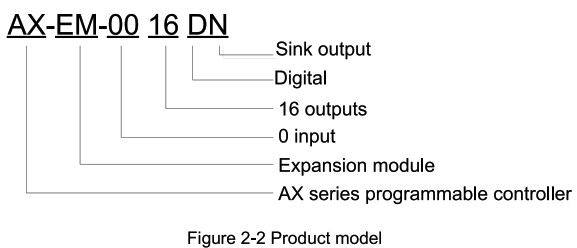
Presentación do produto
Modelo e placa de identificación
Función rematadaview
Como módulo de control principal do controlador programable, o módulo CPU AX7J-C-1608L] (módulo CPU para abreviar) ten as seguintes funcións:
- Realiza o control, seguimento, procesamento de datos e comunicación en rede para o sistema en funcionamento.
- Admite as linguaxes de programación IL, ST, FBD, LD, CFC e SFC compatibles cos estándares IEC61131-3 mediante a plataforma Invtmatic Studio que INVT lanzou para a programación.
- Admite 16 módulos de expansión local (como os módulos de E/S, temperatura e analóxicos).
- Usa Ether CAT ou CAN open bus para conectar módulos escravos, cada un dos cales admite 16 módulos de expansión (como os módulos de E/S, temperatura e analóxicos).
- Admite o protocolo Modbus TCP mestre/escravo.
- Integra dúas interfaces RS485, soportando o protocolo maestro/esclavo Modbus RTU.
- Admite E/S de alta velocidade, 16 entradas de alta velocidade e 8 saídas de alta velocidade.
- Admite control de movemento de bus de campo EtherCAT cun tempo de sincronización de 1 ms, 2 ms, 4 ms ou 8 ms.
- Admite o control de movemento de eixes únicos ou múltiples baseado en pulsos, incluíndo interpolación lineal de 2-4 eixes e interpolación de arco de 2 eixes.
- Soporta reloxo en tempo real.
- Admite a protección de datos por falla de enerxía.
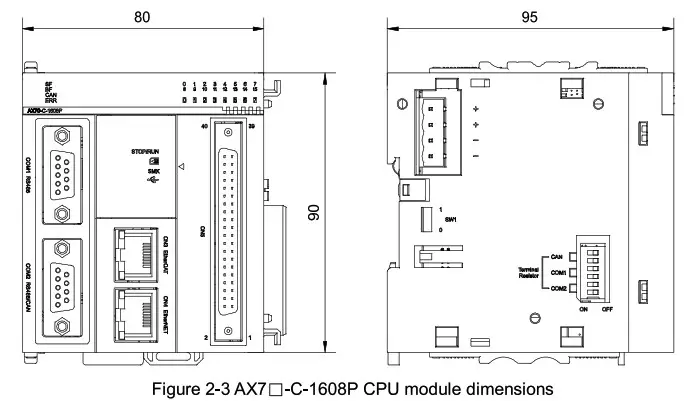
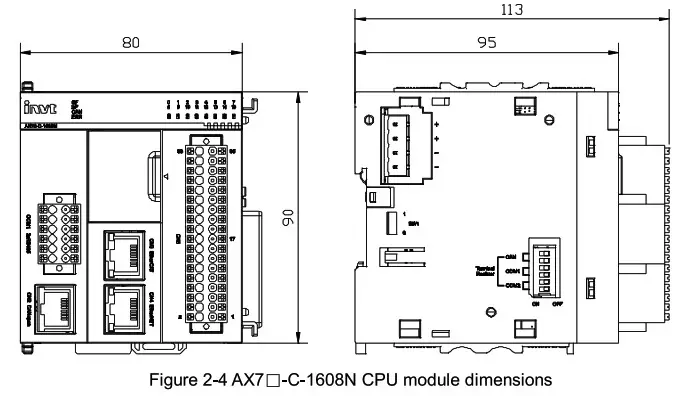
Dimensións estruturais
As dimensións estruturais (unidade: mm) móstranse na seguinte figura.
Interface
Descrición da interface
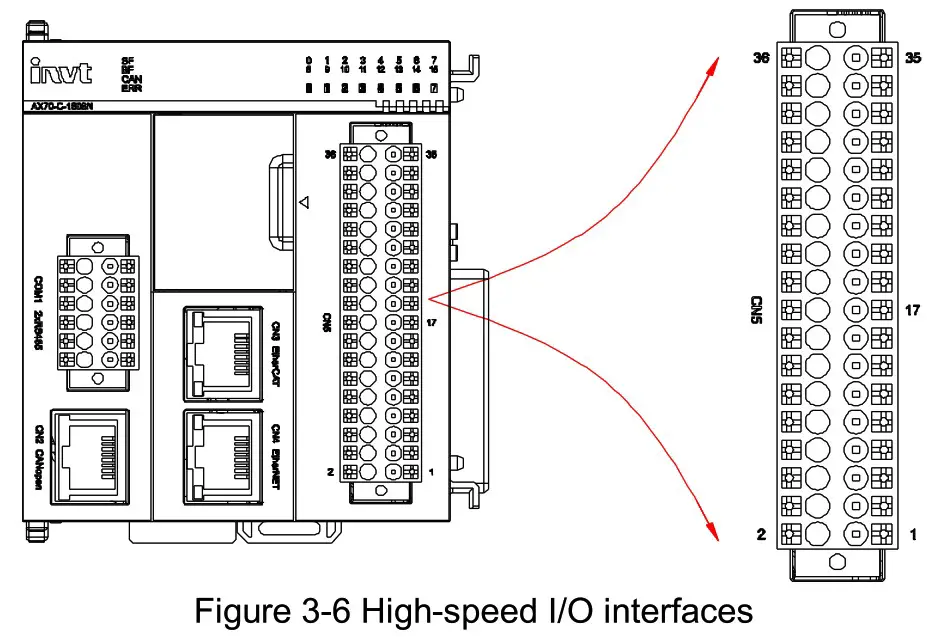
Distribución de interfaces
A Figura 3-1 e a Figura 3-2 mostran a distribución da interface do módulo da CPU. Para cada interface, ofrécese unha descrición de pantalla de seda respectiva nas proximidades, o que facilita o cableado, o funcionamento e a comprobación.
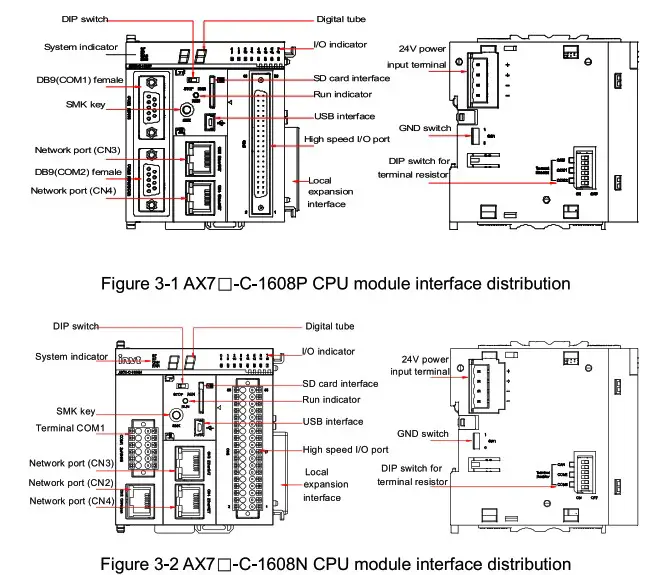
| Interface | Función | |
| Interruptor DIP | Interruptor DIP RUN/STOP. | |
| Indicador do sistema | SF: Indicador de falla do sistema. BF: indicador de falla de bus. CAN: indicador de falla de bus CAN. ERR: indicador de falla de módulo. |
|
| chave SMK | Chave intelixente SMK. | |
| WO-C-1608P | COM1 (DB9) feminino |
Unha interface RS485, compatible con Modbus RTU protocolo mestre/escravo. |
| COM2 (DB9) feminino |
Unha interface RS485 e outra interface CAN A interface RS485 admite o protocolo mestre/escravo Modbus RTU e a outra interface CAN admite o protocolo mestre/escravo CANopen. |
|
| AX70-C-1608N | COM1&COM2 (terminal push-in n) | Dúas interfaces RS485, compatibles con Modbus RTU protocolo mestre/escravo. |
| CN2 (RJ45) | Interface CAN, compatible con protocolo mestre/escravo CAN open. | |
| CN3 (RJ45) | Interface Ether CAT | |
| CN4 (RJ45) | 1.Protocolo Modbus TCP 2.Funcións Ethernet estándar 3. Descarga e depuración do programa de usuario (só con IPv4) |
|
| Tubo dixital | Mostra alarmas e respostas ao premer a tecla SMK. | |
| Indicador de E/S | Indica se os sinais de 16 entradas e 8 saídas son válidos. | |
| Interface da tarxeta SD | Úsase para almacenar programas e datos de usuario. | |
| Indicador de execución | Indica se o módulo CPU está en execución. | |
| Interface USB | Úsase para descargar e depurar programas. | |
| E/S de alta velocidade | 16 entradas de alta velocidade e 8 saídas de alta velocidade. | |
| Interface de expansión local | Admite a expansión de 16 módulos de E/S, o que non permite o intercambio en quente. | |
| Interface de alimentación de 24 V | DC 24 V voltagentrada | |
| Interruptor de posta a terra | Interruptor de conexión entre a terra dixital interna do sistema e a terra da vivenda. Está desconectado por defecto (SW1 está configurado en 0). Utilízase só en escenarios especiais nos que a terra dixital interna do sistema se toma como plano de referencia. Teña coidado antes de operalo. En caso contrario, a estabilidade do sistema vese afectada. | |
| Interruptor DIP da resistencia terminal | ON indica a conexión da resistencia terminal (está OFF por defecto). COM1 corresponde a RS485-1, COM2 corresponde a RS485-2 e CAN corresponde a CAN. | |
chave SMK
A clave SMK úsase principalmente para restablecer o enderezo IP do módulo da CPU (rP) e borrar os programas de aplicación (cA). O enderezo predeterminado do módulo da CPU é 192.168.1.10. Se queres restaurar o enderezo predeterminado a partir dun enderezo IP modificado, podes restauralo mediante a chave SMK. O método é o seguinte:
- Establecer o módulo da CPU no estado STOP. Prema a tecla SMK. Cando o tubo dixital mostre "rP", manteña premida a tecla SMK. A continuación, o tubo dixital mostra "rP" e apágase alternativamente, o que indica que se está a restablecer o enderezo IP. A operación de reinicio ten éxito cando o tubo dixital está apagado constantemente. Se solta a tecla SMK neste momento, o tubo dixital mostra "rP". Manteña premida a tecla SMK ata que o tubo mostre "00" (rP—cA—rU-rP).
- Se solta a tecla SMK durante o proceso no que o tubo dixital mostra "rP" e se apaga alternativamente, a operación de restablecemento do enderezo IP cancelarase e o tubo dixital mostra "rP".
Para borrar un programa do módulo da CPU, faga o seguinte:
Prema a tecla SMK. Cando o tubo dixital mostre "cA", manteña premida a tecla SMK. A continuación, o tubo dixital mostra "rP" e apágase alternativamente, indicando que o programa está a ser borrado. Cando o tubo dixital estea apagado, reinicie o módulo da CPU. O programa borrouse correctamente.
Descrición do tubo dixital
- Se os programas non teñen ningún fallo despois da descarga, o tubo dixital do módulo da CPU mostra "00" de forma constante.
- Se un programa ten un fallo, o tubo dixital mostra a información do fallo de forma intermitente.
- Por exampse só ocorre o fallo 19, o tubo dixital mostra "19" e apágase alternativamente. Se o fallo 19 e o fallo 29 ocorren simultáneamente, o tubo dixital mostra "19", apágase, mostra "29" e apágase alternativamente. Se se producen máis fallos ao mesmo tempo, a forma de visualización é similar.
Definición de terminal
AX7![]() -Definición do terminal de comunicación C-1608P COM1/COM2
-Definición do terminal de comunicación C-1608P COM1/COM2
Para o módulo de CPU AX7LJ-C-1608P, COM1 é o terminal de comunicación RS485 e COM2 é o terminal de comunicación RS485/CAN, ambos os cales usan un conector DB9 para a transmisión de datos. As interfaces e os pinos descríbense a continuación.
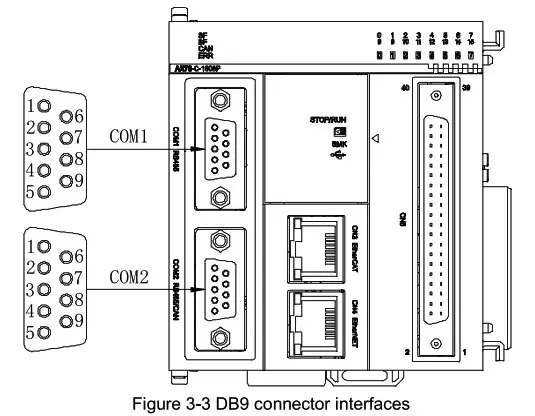
Táboa 3-1 Pins do conector COM1/COM2 DB39
| Interface | Distribución | Pin | Definición | Función |
| COM1 (RS485) |
1 | / | / | |
| 2 | / | / | ||
| 3 | / | / | ||
| 4 | RS485A | Sinal diferencial RS485 + | ||
| 5 | RS485B | sinal diferencial RS485 - | ||
| 6 | / | / | ||
| 7 | / | / | ||
| 8 | / | / | ||
| 9 | GND_RS485 | Terra de alimentación RS485 | ||
| COM2 (RS485/CAN) |
1 | / | / | |
| 2 | PODE _L | sinal diferencial CAN - | ||
| 3 | / | / | ||
| 4 | RS485A | Sinal diferencial RS485 + | ||
| 5 | RS485B | sinal diferencial RS485 - | ||
| 6 | GND_CAN | Terra de alimentación CAN | ||
| 7 | PODE _H | Sinal diferencial CAN + | ||
| 8 | / | / | ||
| 9 | GND_RS485 | Terra de alimentación RS485 |
AX7![]() -C-1608P definición de terminal de E/S de alta velocidade
-C-1608P definición de terminal de E/S de alta velocidade
AX7![]() -O módulo CPU C-1608P ten 16 entradas de alta velocidade e 8 saídas de alta velocidade. As interfaces e os pinos descríbense a continuación.
-O módulo CPU C-1608P ten 16 entradas de alta velocidade e 8 saídas de alta velocidade. As interfaces e os pinos descríbense a continuación.
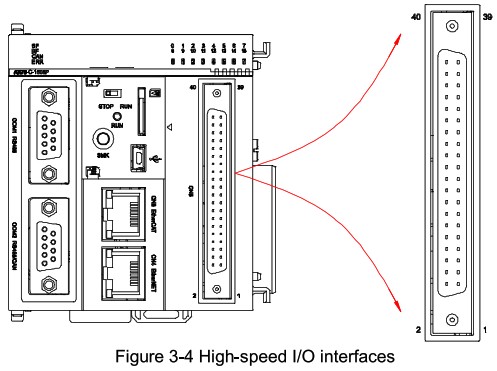
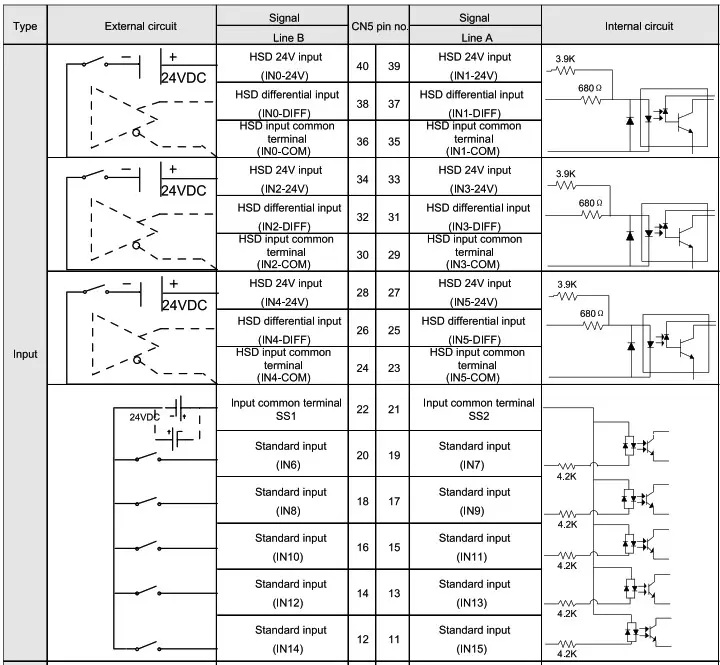
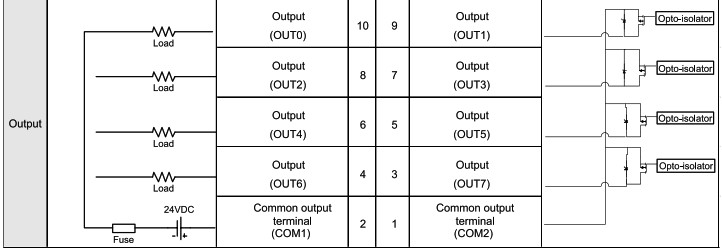
Táboa 3-2 Pins de E/S de alta velocidade
AX7![]() -Definición do terminal de comunicación C-1608N COM1/CN2
-Definición do terminal de comunicación C-1608N COM1/CN2
Para AX7![]() -Módulo CPU C-1608N, COM1 é o terminal de comunicación RS485 de dúas canles, que utiliza un conector push-in de 12 patas para a transmisión de datos. CN2 é o terminal de comunicación CAN que utiliza o conector RJ45 para a transmisión de datos. As interfaces e os pinos descríbense a continuación.
-Módulo CPU C-1608N, COM1 é o terminal de comunicación RS485 de dúas canles, que utiliza un conector push-in de 12 patas para a transmisión de datos. CN2 é o terminal de comunicación CAN que utiliza o conector RJ45 para a transmisión de datos. As interfaces e os pinos descríbense a continuación.

Táboa 3-3 Pins do conector COM1/CN2
| Funcións do terminal push-in de COM1 | ||||
| Definición | Función | Pin | ||
| COM1 RS485 | A | Sinal diferencial RS485 + |
12 | |
| B | sinal diferencial RS485 - | 10 | ||
| GND | Potencia de chip RS485 _1 chan |
8 | ||
| PE | Escudo de terra | 6 | ||
| COM2 RS485 | A | Sinal diferencial RS485 + |
11 | |
| B | sinal diferencial RS485 - | 9 | ||
| GND | Potencia do chip RS485_2 chan |
7 | ||
| PE | Escudo de terra | 5 | ||
| Nota: os pinos 1-4 non se utilizan. | ||||
| Funcións de pin de CN2 | ||||
| Definición | Función | Pin | ||
| CANopen | GND | Terra de alimentación CAN | 1 | |
| CAN_L | sinal diferencial CAN - | 7 | ||
| CAN_H | Sinal diferencial CAN + | 8 | ||
| Nota: os pinos 2-6 non se utilizan. | ||||
AX7![]() -C-1608N definición de terminal de E/S de alta velocidade
-C-1608N definición de terminal de E/S de alta velocidade
AX7![]() O módulo CPU 1-C-1608N ten 16 entradas de alta velocidade e 8 saídas de alta velocidade. A seguinte figura mostra a distribución de terminales e a seguinte táboa enumera os pinos.
O módulo CPU 1-C-1608N ten 16 entradas de alta velocidade e 8 saídas de alta velocidade. A seguinte figura mostra a distribución de terminales e a seguinte táboa enumera os pinos.
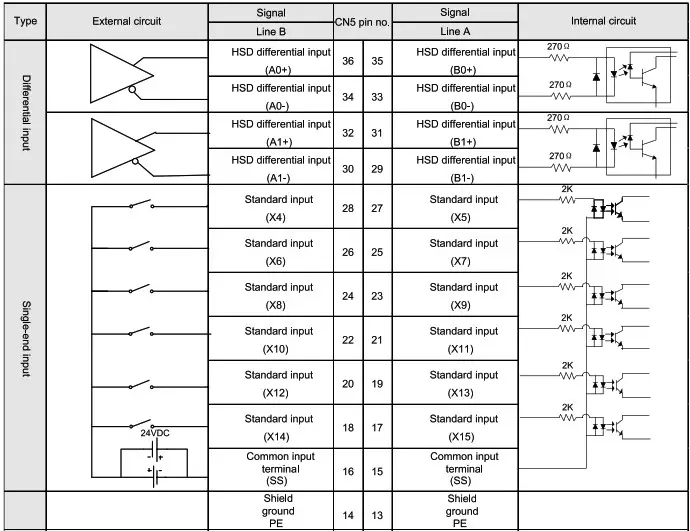
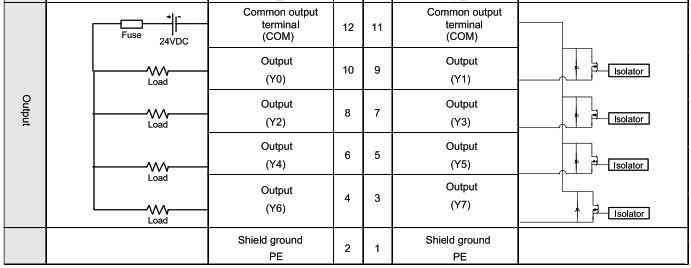
Táboa 3-4 Pins de E/S de alta velocidade
Nota:
- Os 16 canles de entrada do AX7
 -O módulo CPU C-1608P permite entrada de alta velocidade, pero as primeiras 6 canles admiten entrada única ou diferencial de 24 V, e as últimas 10 canles admiten entrada de extremo único de 24 V.
-O módulo CPU C-1608P permite entrada de alta velocidade, pero as primeiras 6 canles admiten entrada única ou diferencial de 24 V, e as últimas 10 canles admiten entrada de extremo único de 24 V. - Os 16 canles de entrada do AX7-O módulo CPU C-1608N permite entrada de alta velocidade, pero as primeiras 4 canles admiten entrada diferencial e as últimas 12 canles admiten entrada de extremo único de 24 V.
- Cada punto de E/S está illado do circuíto interno.
- A lonxitude total do cable de conexión do porto de E/S de alta velocidade non pode exceder os 3 metros.
- Non dobre os cables ao fixar os cables.
- Durante o enrutamento dos cables, separe os cables de conexión dos cables de alta potencia que causen interferencias fortes pero non unen os cables de conexión con estes últimos. Ademais, evite o enrutamento paralelo de longa distancia.
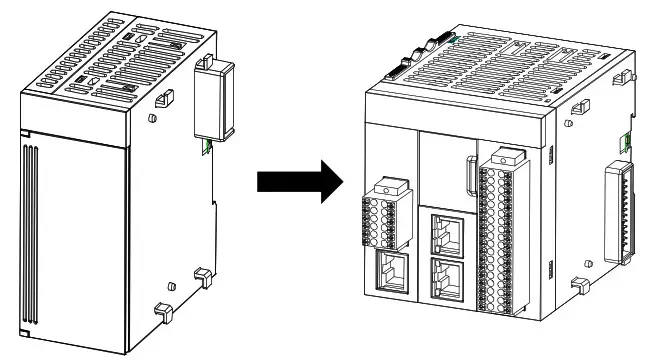
Instalación de módulos
Usando un deseño modular, o controlador programable é fácil de instalar e manter. En canto ao módulo CPU, os principais obxectos de conexión son a fonte de alimentación e os módulos de expansión.
Os módulos conéctanse mediante as interfaces de conexión e axustes a presión proporcionados polo módulo.
O procedemento de montaxe é o seguinte:
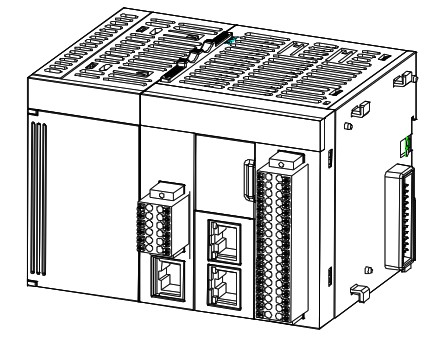
| Paso 1 Deslice o encaixe no módulo da CPU na dirección que se mostra na seguinte figura (usando o módulo de alimentación conexión por example). |
Paso 2 Aliña o módulo da CPU co conector do módulo de alimentación para o enclavamento. |
 |
 |
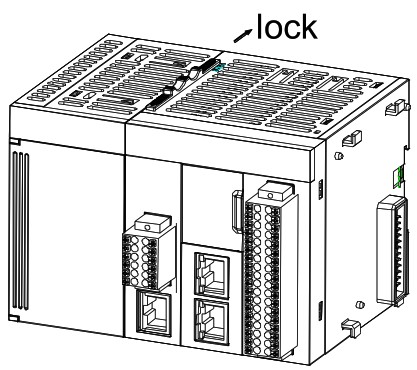
| Paso 3 Deslice o encaixe no módulo da CPU na dirección que se mostra na seguinte figura para conectar e bloquear os dous módulos. | Paso 4 Como para a instalación do carril DIN estándar, enganche o módulo respectivo ao carril de instalación estándar ata que o axuste a presión encaixe no seu lugar. |
 |
 |
Conexión de cables e especificacións
Conexión de bus Ether CAT
Especificacións do bus Ether CAT
| Elemento | Descrición |
| Protocolo de comunicación | Éter CAT |
| Servizo soportado | COE (PDO/SDO) |
| Min. intervalo de sincronización | 1 ms/4 eixes (valor típico) |
| Método de sincronización | DC para sincronización/DC sen usar |
| Capa física | 100BASE-TX |
| Modo dúplex | Full duplex |
| Estrutura da topoloxía | Conexión en serie |
| Medio de transmisión | Cable de rede (consulte a sección "Selección de cables") |
| Distancia de transmisión | Menos de 100 m entre dous nodos |
| Número de nodos escravos | Ata 125 |
| Lonxitude de cadro Ether CAT | 44 bytes-1498 bytes |
| Datos do proceso | Ata 1486 bytes contidos nun único fotograma |
Selección de cable
O módulo CPU pode implementar a comunicación de bus Ether CAT a través do porto CN3. Recoméndanse cables estándar INVT. Se fabrica os cables de comunicación vostede mesmo, asegúrese de que os cables cumpran os seguintes requisitos:
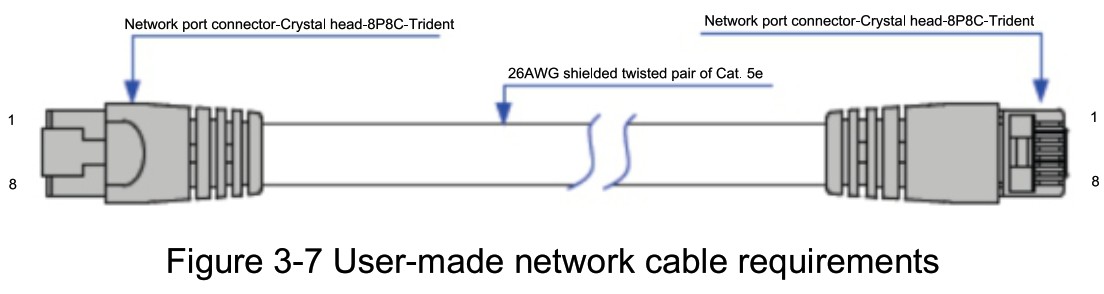
Nota:
- Os cables de comunicación que utilice deben pasar a proba de condutividade ao 100%, sen curtocircuíto, circuíto aberto, dislocación ou mal contacto.
- Para garantir a calidade da comunicación, a lonxitude do cable de comunicación EtherCAT non pode exceder os 100 metros.
- Recoméndase fabricar os cables de comunicación utilizando cables de pares trenzados apantallados de categoría 5e, compatibles con EIA/TIA568A, EN50173, ISO/IEC11801, EIA/TIA boletín TSB e EIA/TIA SB40-A&TSB36.
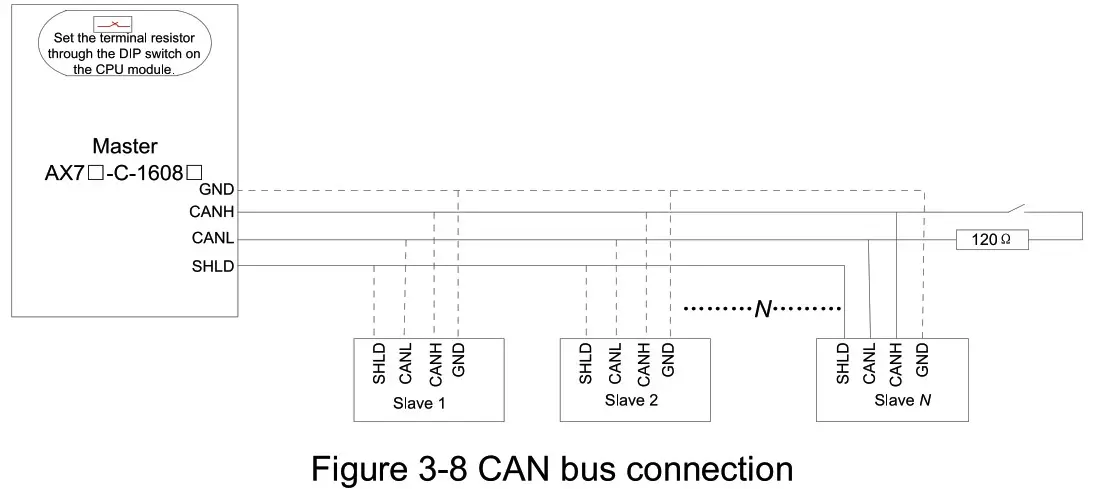
PODE abrir a conexión por cable
Rede
A estrutura da topoloxía da conexión do bus CAN móstrase na seguinte figura. Recoméndase que se use o par trenzado apantallado para a conexión do bus CAN. Cada extremo do bus CAN conéctase a unha resistencia terminal de 1200 para evitar a reflexión do sinal. Na maioría dos casos, a capa de escudo usa a terra dun só punto.
Selección de cable
- Para AX7-Módulo CPU C-1608P, o mesmo terminal úsase tanto para a comunicación CANopen como para a comunicación RS485, utilizando un conector DB9 para a transmisión de datos. Os pinos do conector DB9 foron descritos anteriormente.
- Para AX7Módulo CPU 1-C-1608N, o terminal RJ45 utilízase para a comunicación CANopen para a transmisión de datos. Os pinos do conector RJ45 foron descritos anteriormente.
Recoméndanse cables estándar INVT. Se fabrica os cables de comunicación vostede mesmo, faga os cables segundo a descrición do pin e asegúrese de que o proceso de fabricación e os parámetros técnicos cumpran os requisitos de comunicación.
Nota:
- Para mellorar a capacidade antiinterferencia dos cables, recoméndase utilizar técnicas de blindaxe de folla de aluminio e de blindaxe de trenza de aluminio e magnesio ao fabricar os cables.
- Use a técnica de enrolamento de par trenzado para cables diferenciais.
Conexión de comunicación serie RS485
O módulo CPU admite 2 canles de comunicación RS485.
- Para AX7-Módulo CPU C-1608P, os portos COM1 e COM2 usan o conector DB9 para a transmisión de datos. Os pinos do conector DB9 foron descritos anteriormente.
- Para AX7-Módulo CPU C-1608N, o porto usa o conector de terminal push-in de 12 patas para a transmisión de datos. Os pinos do conector do terminal foron descritos anteriormente.
Recoméndanse cables estándar INVT. Se fabrica os cables de comunicación vostede mesmo, faga os cables segundo a descrición do pin e asegúrese de que o proceso de fabricación e os parámetros técnicos cumpran os requisitos de comunicación.
Nota:
- Para mellorar a capacidade antiinterferencia dos cables, recoméndase utilizar técnicas de blindaxe de folla de aluminio e de blindaxe de trenza de aluminio e magnesio ao fabricar os cables.
- Use a técnica de enrolamento de par trenzado para cables diferenciais.
Conexión Ethernet
Rede
O porto Ethernet do módulo CPU é CN4, que se pode conectar a outro dispositivo, como un ordenador ou un dispositivo HMI mediante un cable de rede no modo punto a punto.
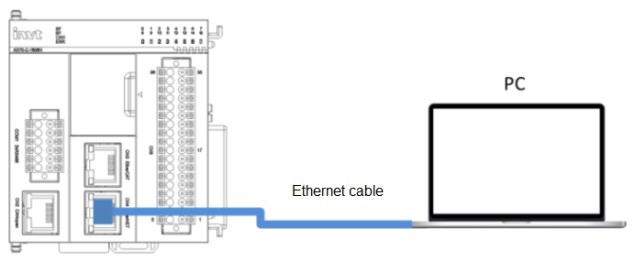
Figura 3-9 Conexión Ethernet
Tamén pode conectar o porto Ethernet a un concentrador ou conmutador mediante un cable de rede, implementando unha conexión multipunto.

Figura 3-10 Rede Ethernet
Selección de cable
Para mellorar a fiabilidade das comunicacións, use cables de pares trenzados apantallados de categoría 5 ou superior como cables Ethernet. Recoméndanse cables estándar INVT.
Use instrucións
Parámetros técnicos
Especificacións xerais do módulo CPU
| Elemento | Descrición | |||||
| Vol. De entradatage | 24VDC | |||||
| Consumo de enerxía | < 15W | |||||
| Falla de enerxía tempo de protección |
300 ms (sen protección nos 20 segundos despois do acendido) | |||||
| Batería de respaldo do reloxo en tempo real |
Soportado | |||||
| Alimentación do bus do plano posterior subministración |
5 V/2.5 A | |||||
| Método de programación | Linguaxes de programación IEC 61131-3 (LD, FBD, IL, ST, SFC, e CFC) |
|||||
| Execución do programa método |
Local en liña | |||||
| Almacenamento de programas de usuario espazo |
10 MB | |||||
| Espazo de memoria flash por falla de enerxía protección |
512KB | |||||
| Tarxeta SD especificacións |
32G MicroSD | |||||
| Elementos brandos e características |
||||||
| Elemento | Nome | Conta | Características de almacenamento | |||
| Por defecto | Wrltable | Descrición | ||||
| I | Relé de entrada | 64 palabras | Non gardar | Non | X: 1 bit B. 8 bits W: 16 bits D: 32 bits L: 64 bits | |
| Q | Relé de saída | 64 palabras | Non gardar | Non | ||
| M | Saída auxiliar | 256 palabras | Gardar | Si | ||
| Retención do programa método sobre potencia fracaso |
Retención por flash interno | |||||
| Modo de interrupción | O sinal DI de alta velocidade do módulo da CPU pódese configurar como entrada de interrupción, permitindo ata oito puntos de entrada, e pódense configurar os modos de interrupción de bordo ascendente e descendente. | |||||
Especificacións de E/S de alta velocidade
Especificacións de entrada de alta velocidade
| Elemento | Especificacións | |
| Nome do sinal | Entrada diferencial de alta velocidade | Entrada dun único extremo de alta velocidade |
| Entrada clasificada voltage |
2.5 V | 24VDC (-15% - +20%, pulsación dentro do 5%) |
| Entrada clasificada actual |
6.8 mA | 5.7 mA (valor típico) (a 24 V CC) |
| actual ON | / | Menos de 2 mA |
| OFF corrente | / | Menos de 1 mA |
| Resistencia de entrada | 5400 | 2.2k0 |
| Máx. contando velocidade |
800 K pulsos/s (frecuencia cuádruple 2PH), 200 kHz (canle único de entrada) | |
| Deber de entrada 2PH proporción |
40%. 60 % | |
| Terminal común | / | Utilízase un terminal común. |
Especificacións de saída de alta velocidade
| Elemento | Especificacións |
| Nome do sinal | Saída (YO—Y7) |
| Polaridade de saída | AX7 AX7 |
| Circuito de control voltage | DC 5V-24V |
| Intensidade de carga nominal | 100 mA/punto, 1A/COM |
| Máx. voltage baixa en ON | 0.2 V (valor típico) |
| Corrente de fuga en OFF | Menos de 0.1 mA |
| Frecuencia de saída | 200 kHz (A saída de 200 kHz require que a carga equivalente conectada externamente sexa superior a 12 mA). |
| Terminal común | Cada oito puntos usa un terminal común. |
Nota:
- Os portos de E/S de alta velocidade teñen restricións sobre a frecuencia permitida. Se a frecuencia de entrada ou saída supera o valor permitido, o control e a identificación poden ser anormais. Organice os portos de E/S correctamente.
- A interface de entrada diferencial de alta velocidade non acepta o nivel de entrada de presión diferencial superior a 7 V. En caso contrario, o circuíto de entrada pode estar danado.
Introdución e descarga de software de programación
Introducción al software de programación
INVTMATIC Studio é un software de programación de controladores programables que desenvolve INVT. Ofrece un ambiente de desenvolvemento de programación aberto e totalmente integrado con tecnoloxía avanzada e potentes funcións para o desenvolvemento de proxectos que se basea en linguaxes de programación conformes coa IEC 61131-3. É amplamente utilizado en enerxía, transporte, municipal, metalurxia, química, farmacéutica, alimentación, téxtil, envases, impresión, caucho e plásticos, máquinas-ferramentas e industrias similares.
Entorno de execución e descarga
Podes instalar Invtmatic Studio nun ordenador de sobremesa ou portátil, cuxo sistema operativo é polo menos Windows 7, o espazo de memoria é de polo menos 2 GB, o espazo de hardware libre é de polo menos 10 GB e a frecuencia principal da CPU é superior a 2 GHz. A continuación, pode conectar o seu ordenador ao módulo da CPU do controlador programable a través dun cable de rede e editar os programas de usuario a través do software Invtmatic Studio para que poida descargar e depurar programas de usuario.
Instancia de programación
A continuación descríbese como realizar a programación usando un example (AX72-C-1608N).
En primeiro lugar, conecte todos os módulos de hardware do controlador programable, incluíndo a conexión da fonte de alimentación ao módulo da CPU, a conexión do módulo da CPU ao ordenador onde se instalou Invtmatic Studio e ao módulo de expansión necesario e a conexión do bus EtherCAT a o accionamento do motor. Inicie Invtmatic Studio para crear un proxecto e realizar a configuración da programación.
O procedemento é o seguinte:
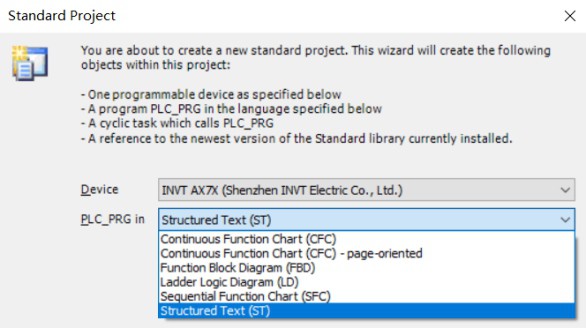
Paso 1 Escolla File > Novo proxecto, seleccione o tipo de proxecto estándar e configure a localización e o nome de gardar o proxecto. Fai clic en Aceptar. A continuación, seleccione o dispositivo INVT AX7X e a linguaxe de programación Structured Text (ST) na xanela de configuración estándar do proxecto que aparece. Aparece a interface de configuración e programación de CODESYS.
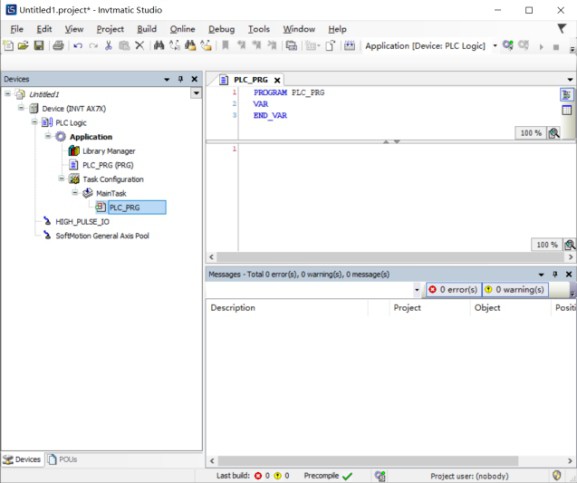
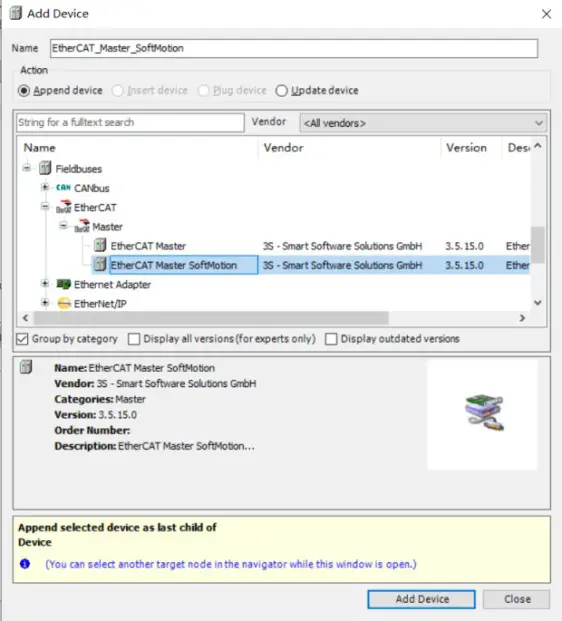
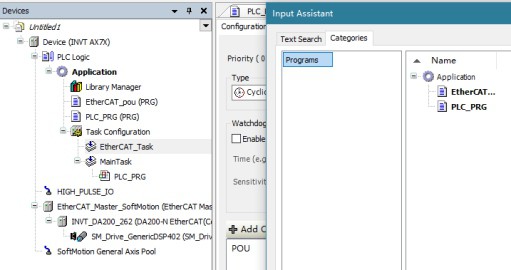
Paso 2 Fai clic co botón dereito na árbore de navegación do dispositivo. A continuación, escolla Engadir dispositivo. Escolla Ether CAT Master Soft Motion.
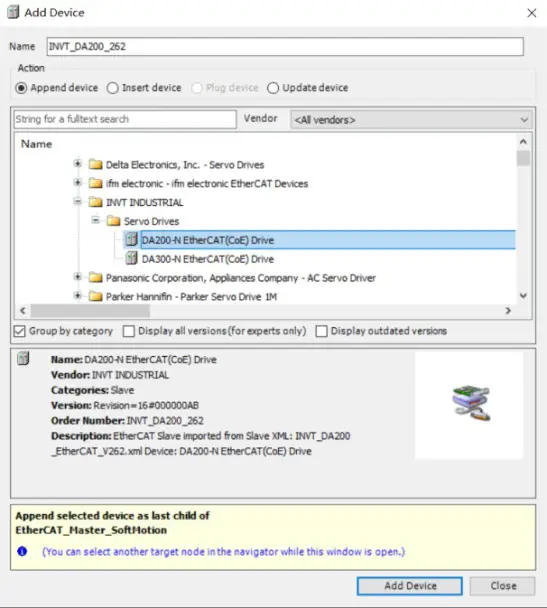
Paso 3 Fai clic co botón dereito EtherCAT_Master_SoftMotion na árbore de navegación esquerda. Escolla Engadir dispositivo. Escolla DA200-N Ether CAT(CoE) Drive na xanela que aparece.
Paso 4 Escolla Engadir eixe SoftMotion CiA402 no menú contextual que aparece.
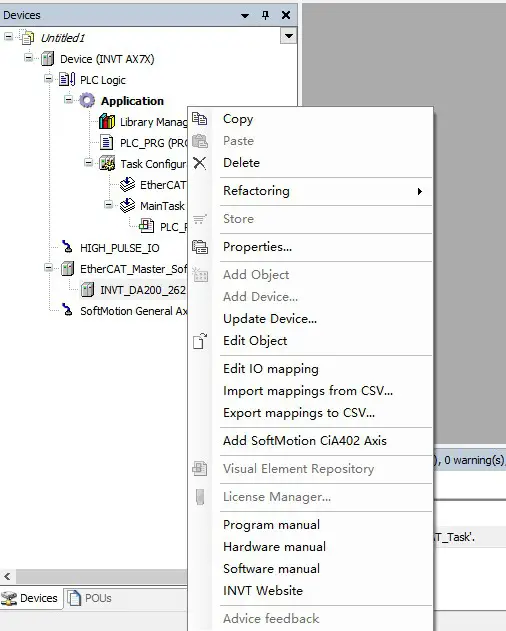
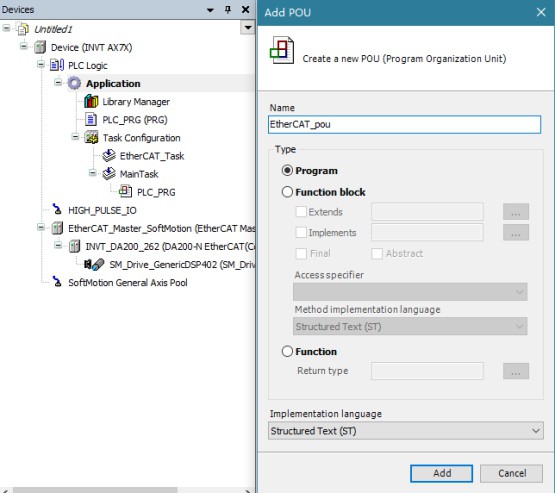
Paso 5 Fai clic co botón dereito do rato en Aplicación na árbore de navegación esquerda e escolla engadir un POU EtherCAT. Fai dobre clic no EtherCAT_Task xerado automaticamente para invocalo. Escolla o EtherCAT_pou creado. Escribe o programa de aplicación baseado no proceso de control da aplicación.
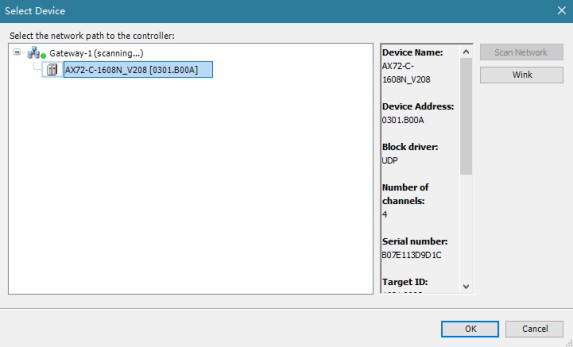
Paso 6 Fai dobre clic na árbore de navegación do dispositivo, fai clic en Escanear rede, escolla AX72-C-1608N que se mostra na seguinte figura e fai clic en Guiño. A continuación, fai clic en Aceptar cando
o indicador do sistema da CPU parpadea.
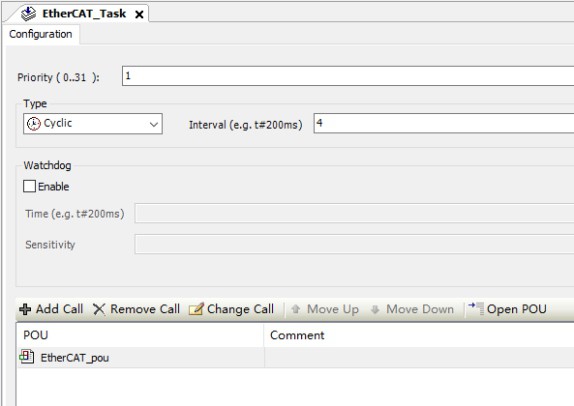
Paso 7 Fai dobre clic en EtherCAT_Task en Configuración de tarefas no panel esquerdo. Establecer prioridades de tarefas e intervalos de execución en función dos requisitos en tempo real da tarefa.
En Invtmatic Studio, podes facer clic ![]() para compilar programas, e pode comprobar se hai erros segundo os rexistros. Despois de confirmar que a compilación é totalmente correcta, podes facer clic
para compilar programas, e pode comprobar se hai erros segundo os rexistros. Despois de confirmar que a compilación é totalmente correcta, podes facer clic ![]() para iniciar sesión e descargar programas de usuario no controlador programable e pode realizar a depuración de simulación.
para iniciar sesión e descargar programas de usuario no controlador programable e pode realizar a depuración de simulación.
Comprobación previa á posta en marcha e mantemento preventivo
Comprobación previa ao arranque
Se rematou o cableado, asegúrese do seguinte antes de comezar a funcionar o módulo:
- Os cables de saída do módulo cumpren os requisitos.
- As interfaces de expansión en calquera nivel están conectadas de forma fiable.
- Os programas de aplicación usan os métodos de operación e a configuración dos parámetros correctos.
Mantemento preventivo
Realice o mantemento preventivo do seguinte xeito:
- Limpar o controlador programable regularmente, evitar a caída de materias estrañas no controlador e garantir boas condicións de ventilación e disipación de calor para o controlador.
- Formular instrucións de mantemento e probar regularmente o controlador.
- Comprobe regularmente o cableado e os terminais para asegurarse de que están ben fixados.
Máis información
Non dubide en contactar connosco para obter máis información. Por favor, proporcione o modelo do produto e o número de serie cando realice unha consulta.
Para obter información relacionada co produto ou servizo, pode:
- Contacte coa oficina local de INVT.
- Visita www.invt.com.
- Escanee o seguinte código QR.

Centro de atención ao cliente, Shenzhen INVT Electric Co., Ltd.
Enderezo: INVT Guangming Technology Building, Songbai Road, Matian, Guangming District, Shenzhen, China
Copyright © INVT. Todos os dereitos reservados. A información manual pode estar suxeita a cambios sen previo aviso.

202207 (V1.0)
Documentos/Recursos
 |
Módulo CPU serie invt AX7 [pdfManual de instrucións Módulo CPU da serie AX7, serie AX7, módulo CPU, módulo |



