![]()
AX7 ![]() シリーズCPUモジュールユーザーマニュアル
シリーズCPUモジュールユーザーマニュアル
AX7シリーズCPUモジュール
このたびは、シーケンサAXシリーズ(略してプログラマブルコントローラ)をお買い上げいただき、誠にありがとうございます。
Invtmatic Studio プラットフォームに基づくこのプログラマブル コントローラは、IEC61131-3 プログラミング システム、EtherCAT リアルタイム フィールドバス、CANopen フィールドバス、および高速ポートを完全にサポートし、電子カム、電子ギア、および補間機能を提供します。
シーケンサのCPUユニットの仕様、特長、配線、使用方法を中心に説明しています。 製品を安全に正しくお使いいただくために、取り付け前に取扱説明書をよくお読みください。 ユーザープログラムの開発環境やユーザープログラムの設計方法については、弊社発行のAXシリーズプログラマブルコントローラーハードウェアユーザーマニュアル、AXシリーズプログラマブルコントローラーソフトウェアユーザーマニュアルをご覧ください。
マニュアルは予告なしに変更されることがあります。 来てください http://www.invt.com 最新のマニュアルバージョンをダウンロードします。
安全上の注意
警告
| シンボル | 名前 | 説明 | 略語 |
| 危険 |
危険 | 関連する要件に従わなかった場合、重大な人身事故や死亡事故につながる可能性があります。 | |
| 警告 |
警告 | 関連する要件に従わない場合、人身事故または機器の損傷が発生する可能性があります。 |
配送と設置
| • 設置、配線、メンテナンス、および検査は、訓練を受けた資格のある専門家のみが行うことができます。 • シーケンサを可燃物の上に設置しないでください。 また、シーケンサに可燃物を接触、付着させないでください。 • プログラマブルコントローラは、IP20 以上の施錠可能な制御盤に設置してください。電気機器に関する知識のない人が誤って触れると、機器の損傷や感電の原因となります。 制御盤を操作できるのは、関連する電気的知識と機器操作トレーニングを受けた担当者のみです。 • プログラマブルコントローラが破損または不完全な場合は、実行しないでください。 • シーケンサに d を接続しないでください。amp オブジェクトまたは身体の一部。 感電の恐れがあります。 |
ケーブルの選択
| • 設置、配線、メンテナンス、および検査は、訓練を受けた資格のある専門家のみが行うことができます。 • インターフェースの種類、仕様、および関連する要件を十分に理解してから配線してください。 誤配線の原因となります。 異常走行。 ・配線は、シーケンサに接続されている電源をすべて遮断してから行ってください。 • 運転のための電源投入前に、各モジュールの端子カバーが取り付けおよび配線が完了し、所定の位置に正しく取り付けられていることを確認してください。 これにより、ライブ端末に触れられなくなります。 けが、故障、誤作動のおそれがあります。 • シーケンサ用外部電源を使用する場合は、適切な保護部品または装置を取り付けてください。 これにより、外部電源の故障、過電圧によるシーケンサの損傷を防ぎます。tage、過電流、またはその他の例外。 |
コミッショニングと実行
| ・電源を投入して運転する前に、シーケンサの使用環境が要件を満たしていること、配線が正しく行われていること、入力電源の仕様が要件を満たしていること、およびプログラマブルコントローラを保護するための保護回路が設計されていることを確認してください。外部機器の故障時でもコントローラを安全に動作させることができます。 • 外部電源が必要なモジュールまたは端末の場合、外部電源またはデバイスの障害による損傷を防ぐために、ヒューズまたはサーキット ブレーカなどの外部安全デバイスを構成します。 |
メンテナンスと部品交換
| • トレーニングを受けた有資格の専門家のみが、本製品のメンテナンス、検査、およびコンポーネントの交換を行うことができます。 プログラマブルコントローラ。 ・端子配線は、シーケンサに接続されている電源をすべて遮断してから行ってください。 ・保守、部品交換の際、シーケンサ内部にネジ、ケーブル等の導電物が落下しないよう対策を施してください。 |
廃棄
| シーケンサには重金属が含まれています。 使用済みシーケンサは産業廃棄物として処理してください。 | |
| スクラップ製品は適切な収集場所で分別して廃棄しますが、通常の廃棄物の流れには入れないでください。 |
製品紹介
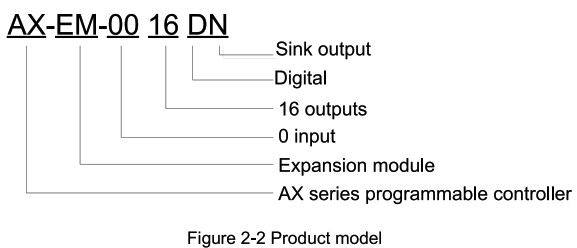
型式と銘板
機能終了view
シーケンサ[AX7J-C-1608L]のメイン制御ユニットとして、CPUユニット(略称CPUモジュール)は以下の機能を有します。
- 稼働中のシステムの制御、監視、データ処理、およびネットワーク通信を実現します。
- INVTがプログラミング用に立ち上げたInvtmatic Studioプラットフォームを利用することで、IEC61131-3規格に準拠したIL、ST、FBD、LD、CFC、SFCのプログラミング言語に対応。
- 16 個のローカル拡張モジュール (I/O、温度、アナログ モジュールなど) をサポートします。
- Ether CAT または CAN オープン バスを使用してスレーブ モジュールを接続します。各スレーブ モジュールは 16 個の拡張モジュール (I/O、温度、アナログ モジュールなど) をサポートします。
- Modbus TCP マスター/スレーブ プロトコルをサポートします。
- Modbus RTU マスター/スレーブ プロトコルをサポートする 485 つの RSXNUMX インターフェイスを統合します。
- 高速I/O、高速入力16点、高速出力8点に対応。
- 同期時間が1ms、2ms、4ms、8msのEtherCATフィールドバスモーションコントロールに対応。
- 2 ~ 4 軸の直線補間と 2 軸の円弧補間を含む、パルスベースの単軸または多軸のモーション コントロールをサポートします。
- リアルタイムクロック対応。
- 停電時のデータ保護をサポート。
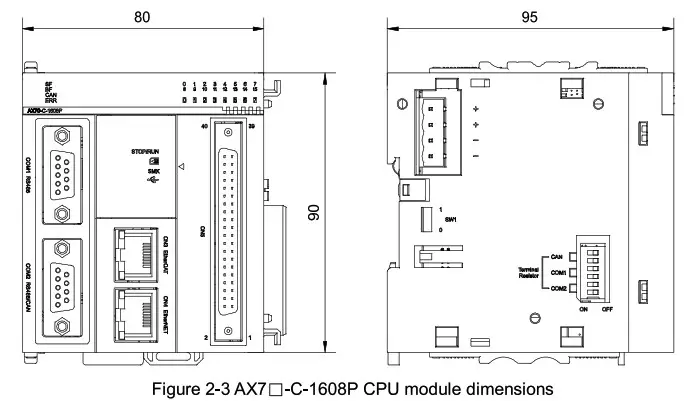
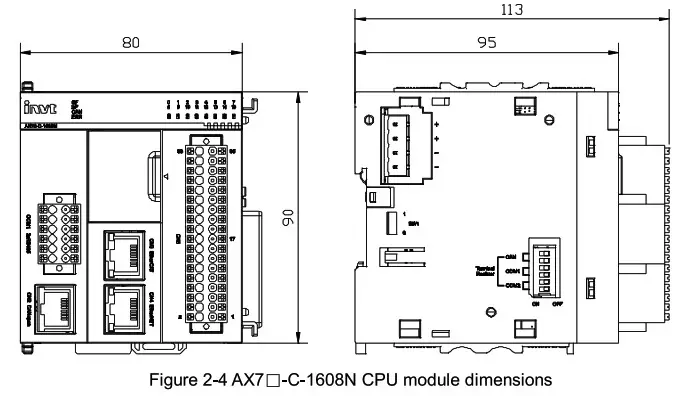
構造寸法
構造寸法(単位:mm)を下図に示します。
インタフェース
インターフェースの説明
インターフェイスの配布
図 3-1 および図 3-2 は、CPU モジュール インターフェイスの分布を示しています。 各インターフェースについて、それぞれのシルクスクリーンの説明が近くに提供されているため、配線、操作、およびチェックが容易になります。
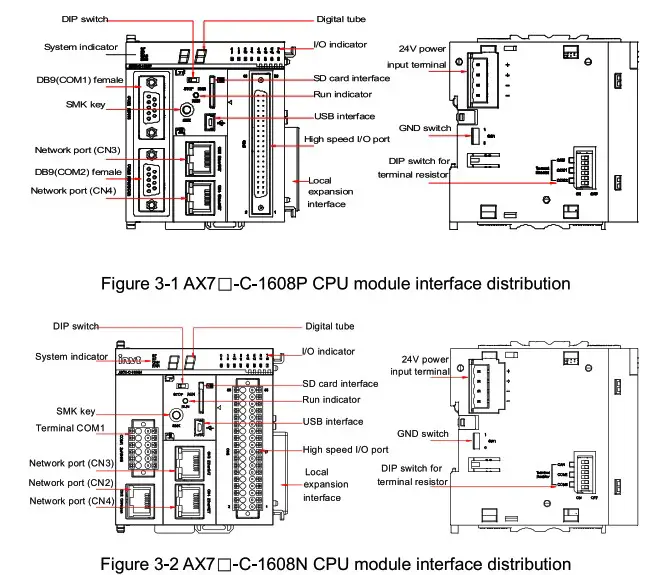
| インタフェース | 関数 | |
| DIPスイッチ | RUN/STOPディップスイッチ。 | |
| システムインジケータ | SF: システム障害インジケータ。 BF: バス障害インジケータ。 CAN: CAN バス障害インジケータ。 ERR: モジュール障害インジケータ。 |
|
| SMK キー | SMKスマートキー。 | |
| WO-C-1608P | COM1 (DB9) 女性 |
Modbus RTU をサポートする 485 つの RSXNUMX インターフェイス マスター/スレーブ プロトコル。 |
| COM2 (DB9) 女性 |
485 つの RSXNUMX インターフェイスと、もう XNUMX つの CAN インターフェイス RS485 インターフェイスは Modbus RTU マスター/スレーブ プロトコルをサポートし、他の CAN インターフェイスは CANopen マスター/スレーブ プロトコルをサポートします。 |
|
| AX70-C-1608N | COM1&COM2 (プッシュイン端子) | Modbus RTU をサポートする 485 つの RSXNUMX インターフェイス マスター/スレーブ プロトコル。 |
| CN2(RJ45) | CAN インターフェース、CAN オープン マスター/スレーブ プロトコルをサポート。 | |
| CN3(RJ45) | イーサCATインターフェース | |
| CN4(RJ45) | 1.Modbus TCP プロトコル 2.Ethernetの標準機能 3.ユーザプログラムのダウンロードとデバッグ(IPv4のみ) |
|
| デジタル管 | アラームを表示し、SMK キーを押すと応答します。 | |
| I/O インジケータ | 入力16点、出力8点の信号が有効かどうかを示します。 | |
| SDカードインタフェース | ユーザープログラムやデータの保存に使用します。 | |
| 実行インジケータ | CPUモジュールが動作しているかどうかを示します。 | |
| USBインターフェース | プログラムのダウンロードとデバッグに使用されます。 | |
| 高速I/O | 高速入力16点、高速出力8点。 | |
| ローカル拡張インターフェース | 16 I/O モジュールの拡張をサポートし、ホットスワップを禁止します。 | |
| 24V電源インターフェース | DC24V巻tage入力 | |
| 接地スイッチ | システム内部デジタルグランドとハウジンググランド間の接続スイッチ。 デフォルトでは切断されています (SW1 は 0 に設定されています)。 これは、システム内部のデジタル グランドが基準面として使用される特別なシナリオでのみ使用されます。 操作する前に注意してください。 そうしないと、システムの安定性が損なわれます。 | |
| 終端抵抗のディップスイッチ | ON は終端抵抗の接続を示します (デフォルトでは OFF です)。 COM1 は RS485-1 に対応し、COM2 は RS485-2 に対応し、CAN は CAN に対応します。 | |
SMK キー
SMK キーは、主に CPU モジュールの IP アドレス (rP) のリセット、およびアプリケーション プログラム (cA) のクリアに使用されます。 デフォルトの CPU モジュール アドレスは 192.168.1.10 です。 変更した IP アドレスからデフォルト アドレスを復元する場合は、SMK キーを使用してデフォルト アドレスを復元できます。 方法は次のとおりです。
- CPUユニットをSTOP状態にします。 SMK キーを押します。 デジタル管に「rP」が表示されたら、SMK キーを長押しします。 その後、デジタル管に「rP」と表示され、交互に消灯し、IP アドレスのリセットが実行されていることを示します。 デジタル管が安定してオフになると、リセット操作は成功します。 ここで SMK キーを離すと、デジタル管に「rP」が表示されます。 チューブに「00」(rP—cA—rU-rP)が表示されるまで、SMK キーを押し続けます。
- デジタル管が「rP」表示と消灯を繰り返す過程でSMKキーを離すと、IPアドレスのリセット動作がキャンセルされ、デジタル管表示が「rP」となります。
CPU モジュールからプログラムをクリアするには、次のようにします。
SMK キーを押します。 デジタルチューブに「cA」が表示されたら、SMK キーを長押しします。 次に、デジタルチューブに「rP」と表示され、交互にオフになり、プログラムがクリアされていることを示します。 デジタル管が安定してオフになったら、CPU モジュールを再起動します。 プログラムは正常にクリアされます。
デジタルチューブの説明
- ダウンロード後、プログラムに問題がなければ、CPUモジュールのデジタル管は常時「00」を表示します。
- プログラムに障害がある場合、デジタル管は障害情報を点滅表示します。
- 例えばampつまり、障害 19 のみが発生した場合、デジタル管は「19」を表示し、交互にオフになります。 フォルト 19 とフォルト 29 が同時に発生した場合、デジタル管は「19」を表示し、消灯し、「29」を表示し、交互に消灯します。 より多くの障害が同時に発生した場合、表示方法は同様です。
端子の定義
AX7![]() ・C-1608P COM1/COM2通信端子定義
・C-1608P COM1/COM2通信端子定義
AX7LJ-C-1608P CPU モジュールの場合、COM1 は RS485 通信端子、COM2 は RS485/CAN 通信端子で、どちらも DB9 コネクタを使用してデータを伝送します。 インターフェイスとピンについては、以下で説明します。
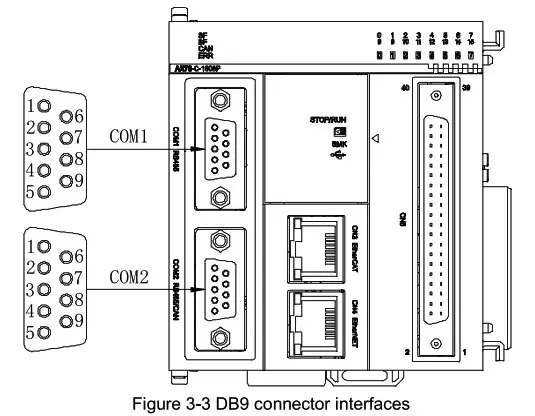
表 3-1 COM1/COM2 DB39 コネクタのピン
| インタフェース | 分布 | ピン | 意味 | 関数 |
| COM1 (RS485) |
1 | / | / | |
| 2 | / | / | ||
| 3 | / | / | ||
| 4 | Rs485a | RS485差動信号+ | ||
| 5 | RS485B | RS485差動信号– | ||
| 6 | / | / | ||
| 7 | / | / | ||
| 8 | / | / | ||
| 9 | GND_RS485 | RS485 電源グランド | ||
| COM2 (RS485/CAN) |
1 | / | / | |
| 2 | 出来る | CAN 差動信号 – | ||
| 3 | / | / | ||
| 4 | Rs485a | RS485差動信号+ | ||
| 5 | RS485B | RS485差動信号– | ||
| 6 | GND_CAN | CAN電源グランド | ||
| 7 | CAN_H | CAN差動信号+ | ||
| 8 | / | / | ||
| 9 | GND_RS485 | RS485 電源グランド |
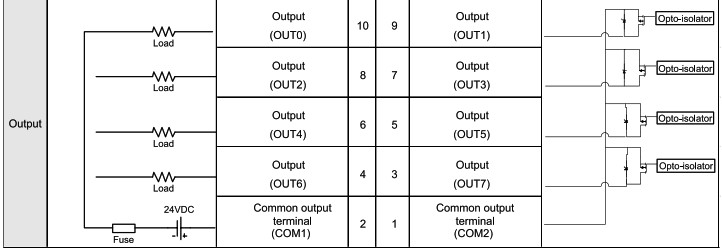
AX7![]() -C-1608P 高速 I/O ターミナルの定義
-C-1608P 高速 I/O ターミナルの定義
AX7![]() ●C-1608P CPUモジュールは高速入力16点、高速出力8点。 インターフェイスとピンについては、以下で説明します。
●C-1608P CPUモジュールは高速入力16点、高速出力8点。 インターフェイスとピンについては、以下で説明します。
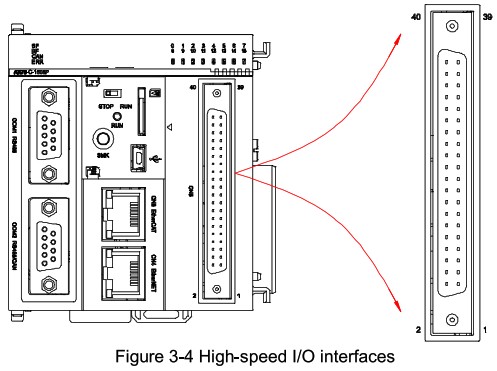
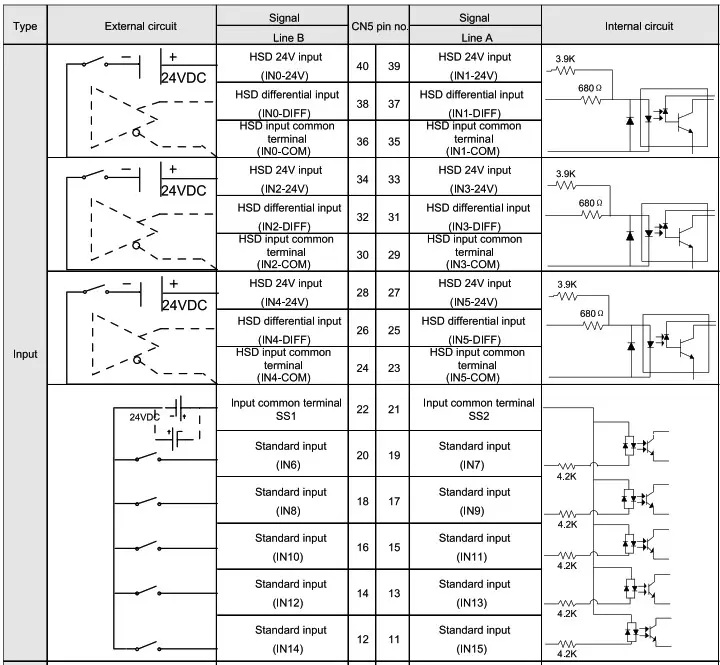
表 3-2 高速 I/O ピン
AX7![]() -C-1608N COM1/CN2通信端子定義
-C-1608N COM1/CN2通信端子定義
AX7の場合![]() -C-1608N CPU モジュール、COM1 は 485 チャンネルの RS12 通信端子で、データ伝送用に 2 ピンのプッシュイン コネクタを使用します。 CN45 は CAN 通信端子で、RJXNUMX コネクタを使用してデータを送信します。 インターフェイスとピンについては、以下で説明します。
-C-1608N CPU モジュール、COM1 は 485 チャンネルの RS12 通信端子で、データ伝送用に 2 ピンのプッシュイン コネクタを使用します。 CN45 は CAN 通信端子で、RJXNUMX コネクタを使用してデータを送信します。 インターフェイスとピンについては、以下で説明します。

表 3-3 COM1/CN2 コネクタのピン
| COM1のプッシュイン端子機能 | ||||
| 意味 | 関数 | ピン | ||
| COM1 RS485 | A | RS485 差動信号 + |
12 | |
| B | RS485差動信号– | 10 | ||
| グランド | RS485 _1 チップ電源 地面 |
8 | ||
| PE | シールドグランド | 6 | ||
| COM2 RS485 | A | RS485 差動信号 + |
11 | |
| B | RS485差動信号– | 9 | ||
| グランド | RS485_2 チップ電源 地面 |
7 | ||
| PE | シールドグランド | 5 | ||
| 注: ピン 1 ~ 4 は使用されません。 | ||||
| CN2の端子機能 | ||||
| 意味 | 関数 | ピン | ||
| CANopenの利用 | グランド | CAN電源グランド | 1 | |
| 私はできる | CAN 差動信号 – | 7 | ||
| CAN_H | CAN差動信号+ | 8 | ||
| 注: ピン 2 ~ 6 は使用されません。 | ||||
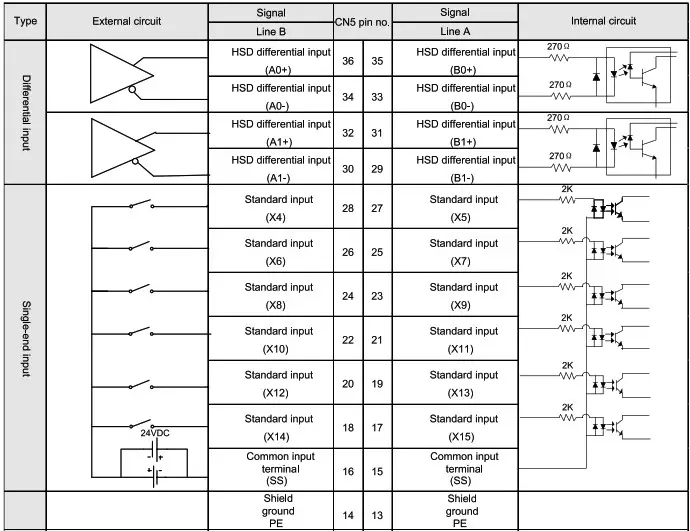
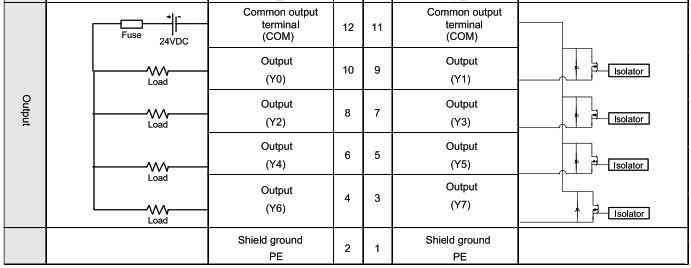
AX7![]() -C-1608N 高速 I/O ターミナルの定義
-C-1608N 高速 I/O ターミナルの定義
AX7![]() 1-C-1608N CPUモジュールは高速入力16点、高速出力8点。 次の図は端子の分布を示し、次の表はピンの一覧です。
1-C-1608N CPUモジュールは高速入力16点、高速出力8点。 次の図は端子の分布を示し、次の表はピンの一覧です。
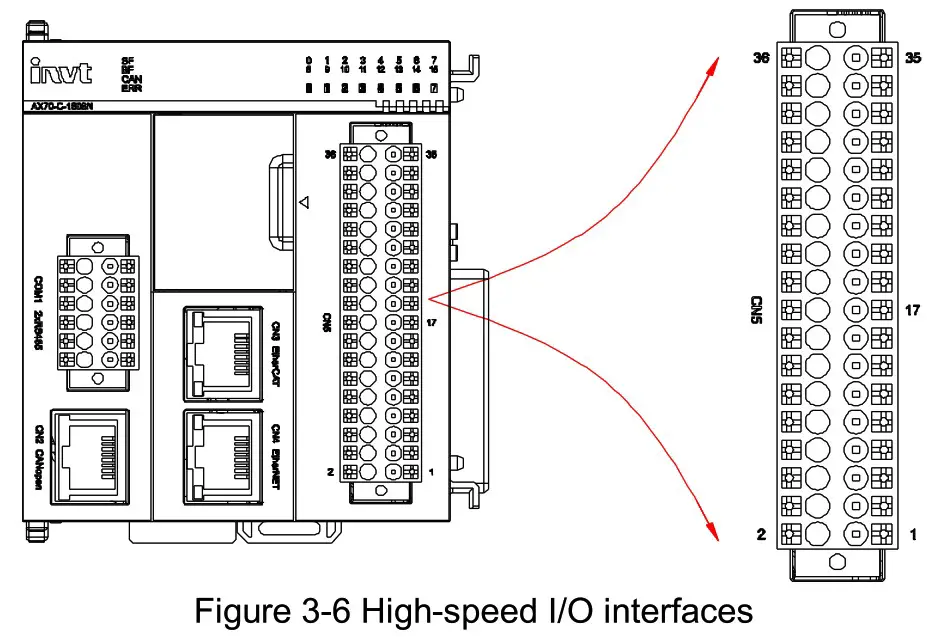
表 3-4 高速 I/O ピン
注記:
- AX16の全7入力チャンネル
 -C-1608P CPU モジュールは高速入力を可能にしますが、最初の 6 チャネルは 24V シングルエンドまたは差動入力をサポートし、最後の 10 チャネルは 24V シングルエンド入力をサポートします。
-C-1608P CPU モジュールは高速入力を可能にしますが、最初の 6 チャネルは 24V シングルエンドまたは差動入力をサポートし、最後の 10 チャネルは 24V シングルエンド入力をサポートします。 - AX16の全7入力チャンネル-C-1608N CPUモジュールは高速入力が可能ですが、最初の4チャネルは差動入力をサポートし、最後の12チャネルは24Vシングルエンド入力をサポートします.
- 各 I/O ポイントは、内部回路から分離されています。
- 高速 I/O ポート接続ケーブルの全長は 3 メートルを超えることはできません。
- ケーブルを固定するときは、ケーブルを曲げないでください。
- ケーブルを配線する際、強い干渉を引き起こす高出力ケーブルから接続ケーブルを分離しますが、後者との接続ケーブルを一緒に束ねないでください。 また、長距離の並列ルーティングは避けてください。
モジュールのインストール
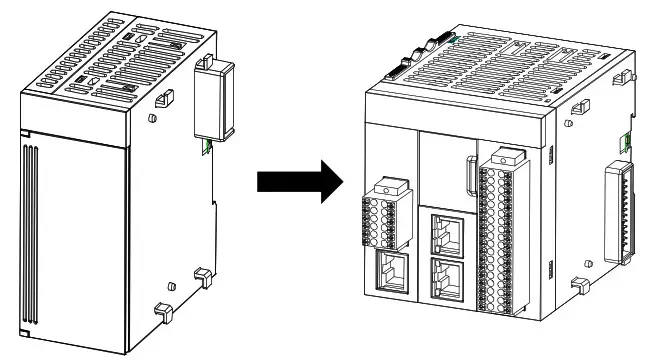
プログラマブル コントローラはモジュラー設計を採用しているため、設置と保守が容易です。 CPUモジュールの場合、主な接続対象は電源モジュールと増設モジュールです。
モジュールは、モジュールが提供する接続インターフェイスとスナップ フィットを使用して接続されます。
取り付け手順は次のとおりです。
| ステップ 1 CPU モジュールのスナップ フィットを次の図に示す方向にスライドさせます (電源モジュールを使用 元の接続ample)。 |
ステップ 2 CPU モジュールを電源モジュール コネクタに合わせてインターロックします。 |
 |
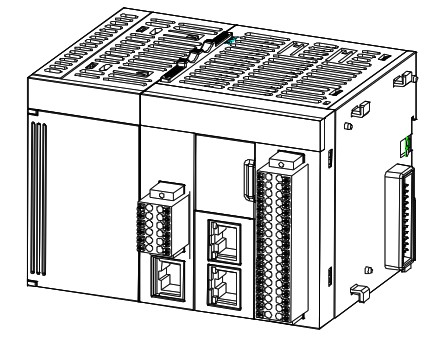 |
| ステップ 3 CPU モジュールのスナップ フィットを次の図に示す方向にスライドさせ、XNUMX つのモジュールを接続してロックします。 | ステップ 4 標準の DIN レールの取り付けと同様に、スナップフィットが所定の位置にカチッと収まるまで、それぞれのモジュールを標準の取り付けレールに引っ掛けます。 |
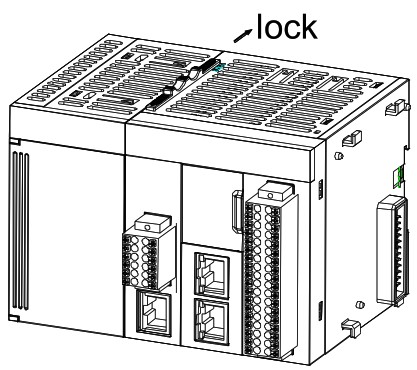 |
 |
ケーブルの接続と仕様
EtherCATバス接続
EtherCATバス仕様
| アイテム | 説明 |
| 通信プロトコル | エーテルキャット |
| 対応サービス | COE(PDO/SDO) |
| 最小。 同期間隔 | 1ms/4軸(代表値) |
| 同期方法 | 同期用DC/DC未使用 |
| 物理層 | 100BASE-TX |
| 二重モード | 全二重 |
| トポロジ構造 | シリアル接続 |
| 伝送媒体 | ネットワークケーブル (「ケーブルの選択」のセクションを参照) |
| 伝送距離 | 100 つのノード間が XNUMXm 未満 |
| スレーブノード数 | 最大125 |
| EtherCAT フレーム長 | 44バイト~1498バイト |
| データを処理する | 1486 フレームに含まれる最大 XNUMX バイト |
ケーブルの選択
CPUモジュールは、CN3ポートを介してEther CATバス通信を実装できます。 INVT 標準ケーブルを推奨します。 通信ケーブルを自作する場合は、ケーブルが次の要件を満たしていることを確認してください。
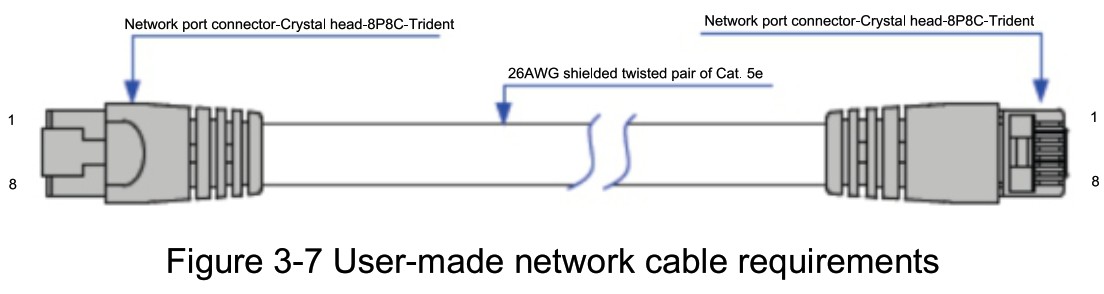
注記:
- 使用する通信ケーブルは、導通テストに 100% 合格し、短絡、開回路、脱落、または接触不良がなければなりません。
- 通信品質を確保するため、EtherCAT 通信ケーブルの長さは 100 メートルを超えることはできません。
- 通信ケーブルは、EIA/TIA5A、EN568、ISO/IEC50173、EIA/TIA Bulletin TSB、EIA/TIA SB11801-A&TSB40 に準拠したカテゴリ 36e のシールド付きツイストペア ケーブルを使用することをお勧めします。
CANオープンケーブル接続
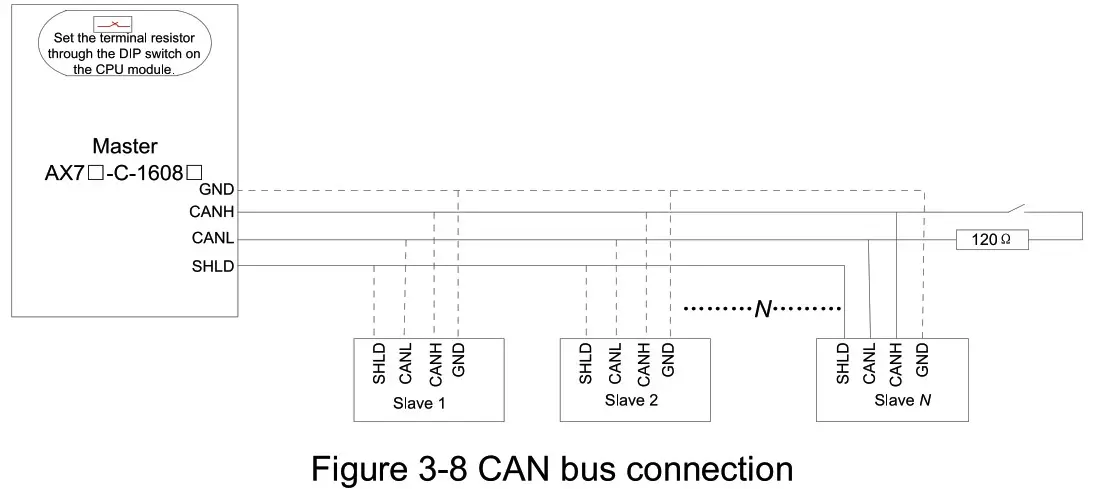
ネットワーキング
CAN バス接続のトポロジ構造を次の図に示します。 CAN バス接続には、シールド付きツイストペアを使用することをお勧めします。 CAN バスの両端は 1200 の終端抵抗に接続され、信号の反射を防ぎます。 ほとんどの場合、シールド層は一点接地を使用します。
ケーブルの選択
- AX7の場合●C-1608P CPUモジュールは、CANopen通信とRS485通信の両方に同一端子を使用し、データ伝送にはDB9コネクタを使用。 DB9 コネクタのピンについては、以前に説明しました。
- AX7の場合1-C-1608N CPU モジュール、RJ45 端子はデータ伝送用の CANopen 通信に使用されます。 RJ45 コネクタのピンについては、前述のとおりです。
INVT 標準ケーブルを推奨します。 通信ケーブルを自分で作成する場合は、ピンの説明に従ってケーブルを作成し、製造プロセスと技術パラメータが通信要件を満たしていることを確認してください。
注記:
- ケーブルの干渉防止機能を強化するには、ケーブルを作成する際に、アルミ ホイル シールドおよびアルミ マグネシウム編組シールド技術を使用することをお勧めします。
- 差動ケーブルにはツイストペア巻線技術を使用してください。
RS485シリアル通信接続
CPU モジュールは 2 チャネルの RS485 通信をサポートします。
- AX7の場合-C-1608P CPU モジュール、ポート COM1 および COM2 は、データ伝送に DB9 コネクタを使用します。 DB9 コネクタのピンについては、以前に説明しました。
- AX7の場合●C-1608N CPUモジュール、ポートはデータ伝送用に12ピンのプッシュイン端子コネクタを使用。 端末コネクタのピンについては、以前に説明しました。
INVT 標準ケーブルを推奨します。 通信ケーブルを自分で作成する場合は、ピンの説明に従ってケーブルを作成し、製造プロセスと技術パラメータが通信要件を満たしていることを確認してください。
注記:
- ケーブルの干渉防止機能を強化するには、ケーブルを作成する際に、アルミ ホイル シールドおよびアルミ マグネシウム編組シールド技術を使用することをお勧めします。
- 差動ケーブルにはツイストペア巻線技術を使用してください。
イーサネット接続
ネットワーキング
CPU モジュールのイーサネット ポートは CN4 で、ポイント ツー ポイント モードでネットワーク ケーブルを使用してコンピュータや HMI デバイスなどの別のデバイスに接続できます。
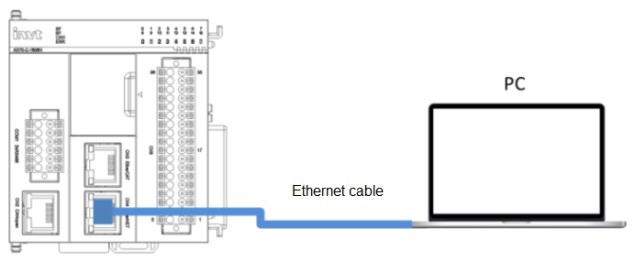
図 3-9 イーサネット接続
また、ネットワーク ケーブルを使用して、イーサネット ポートをハブまたはスイッチに接続し、マルチポイント接続を実装できます。

図 3-10 イーサネット ネットワーク
ケーブルの選択
通信の信頼性を高めるため、Ethernet ケーブルはカテゴリ 5 以上のシールド付きツイストペア ケーブルを使用してください。 INVT 標準ケーブルを推奨します。
使用方法
技術的パラメータ
CPUモジュール一般仕様
| アイテム | 説明 | |||||
| 入力ボリュームtage | 24VDC | |||||
| 消費電力 | 15W未満 | |||||
| 停電 保護時間 |
300ms(電源投入後20秒以内は無保護) | |||||
| のバックアップ電池 リアルタイムクロック |
サポート | |||||
| バックプレーン バスパワー 供給 |
5V/2.5A | |||||
| プログラミング方法 | IEC 61131-3 プログラミング言語 (LD、FBD、IL、ST、SFC、 およびCFC) |
|||||
| プログラム実行 方法 |
ローカルオンライン | |||||
| ユーザープログラム格納 空間 |
10MB | |||||
| フラッシュメモリスペース 停電のため 保護 |
512KB | |||||
| SDカード 仕様 |
32GマイクロSD | |||||
| ソフト要素と 特徴 |
||||||
| 要素 | 名前 | カウント | 保管特性 | |||
| デフォルト | 書き込み可能 | 説明 | ||||
| I | 入力リレー | 64Kワード | 保存しない | いいえ | X: 1 ビット B. 8 ビット W: 16 ビット D: 32 ビット L: 64 ビット | |
| Q | 出力リレー | 64Kワード | 保存しない | いいえ | ||
| M | 補助出力 | 256Kワード | 保存 | はい | ||
| プログラムの保持 パワーオンメソッド 失敗 |
内蔵フラッシュによる保持 | |||||
| 中断モード | CPUユニットの高速DI信号を割り込み入力として最大XNUMX点の入力が可能で、立ち上がりエッジ割り込みモードと立ち下がりエッジ割り込みモードを設定できます。 | |||||
高速I/O仕様
高速入力仕様
| アイテム | Specifcations | |
| 信号名 | 高速差動入力 | 高速シングルエンド入力 |
| 定格入力 巻tage |
2.5V | DC24V(-15%~+20%、脈動) 5%以内) |
| 定格入力 現在 |
6.8mA | 5.7mA(代表値)(DC24V時) |
| オン電流 | / | 2mA未満 |
| オフ電流 | / | 1mA未満 |
| 入力抵抗 | 5400 | 2.2k0 |
| 最大。 数える スピード |
800K パルス/秒 (2PH 200 倍周波数)、XNUMXkHz (入力の単一チャネル) | |
| 2PH 入力デューティ 比率 |
40%。 60% | |
| 共通端子 | / | XNUMX つの共通端子が使用されます。 |
高速出力仕様
| アイテム | 仕様 |
| 信号名 | 出力 (YO—Y7) |
| 出力極性 | AX7 AX7 |
| 制御回路voltage | DC 5V-24V |
| 定格負荷電流 | 100mA/点、1A/COM |
| 最大vol。tagONでドロップ | 0.2V (代表値) |
| OFF時漏れ電流 | 0.1mA未満 |
| 出力周波数 | 200kHz (200kHz の出力には、外部に接続された等価負荷が 12mA を超える必要があります。) |
| 共通端子 | XNUMX 点ごとに XNUMX つのコモン端子を使用します。 |
注記:
- 高速 I/O ポートには、使用できる周波数に制限があります。 入力または出力周波数が許容値を超えると、制御および識別が異常になる可能性があります。 I/O ポートを適切に配置します。
- 高速差動入力インターフェイスは、7V を超える差圧入力レベルを受け入れません。 入力回路が破損する恐れがあります。
プログラミングソフトの紹介とダウンロード
プログラミングソフト紹介
INVTMATIC Studioは、INVTが開発したシーケンサプログラミングソフトウェアです。 IEC 61131-3 に準拠したプログラミング言語に基づくプロジェクト開発用の高度なテクノロジと強力な機能を備えた、オープンで完全に統合されたプログラミング開発環境を提供します。 エネルギー、輸送、地方自治体、冶金、化学、製薬、食品、繊維、包装、印刷、ゴムとプラスチック、工作機械、および同様の産業で広く使用されています。
実行環境とダウンロード
Invtmatic Studio は、オペレーティング システムが Windows 7 以降で、メモリ容量が 2GB 以上、ハードウェアの空き容量が 10GB 以上、CPU のメイン周波数が 2GHz を超えるデスクトップまたはポータブル コンピューターにインストールできます。 次に、ネットワーク ケーブルを介してコンピュータをシーケンサの CPU モジュールに接続し、Invtmatic Studio ソフトウェアを介してユーザ プログラムを編集し、ユーザ プログラムをダウンロードしてデバッグすることができます。
プログラミングインスタンス
以下に、ex を使用してプログラミングを行う方法について説明します。ampル(AX72-C-1608N)。
まず、CPUモジュールへの電源の接続、Invtmatic Studioがインストールされているコンピュータと必要な拡張モジュールへのCPUモジュールの接続、EtherCATバスへの接続など、シーケンサのすべてのハードウェアモジュールを接続します。モータードライブ。 Invtmatic Studio を起動してプロジェクトを作成し、プログラミング構成を実行します。
手順は次のとおりです。
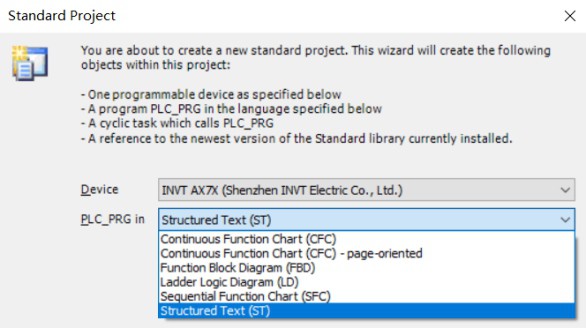
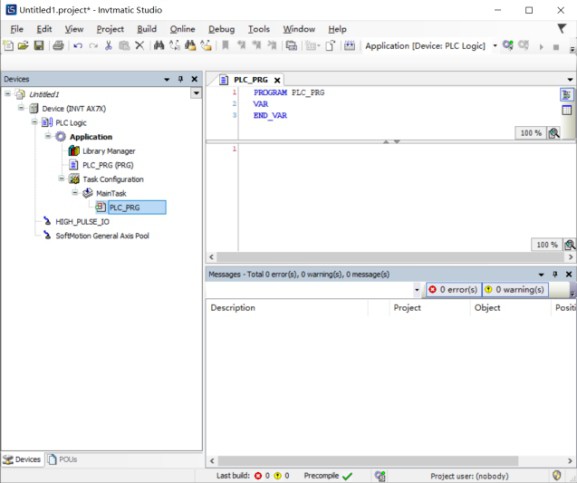
ステップ1選択 File > 新規プロジェクト、標準プロジェクト タイプを選択し、プロジェクトの保存場所と名前を設定します。 [OK] をクリックします。 次に、表示される標準のプロジェクト構成ウィンドウで、INVT AX7X デバイスとストラクチャード テキスト (ST) プログラミング言語を選択します。 CODESYS 構成およびプログラミング インターフェイスが表示されます。
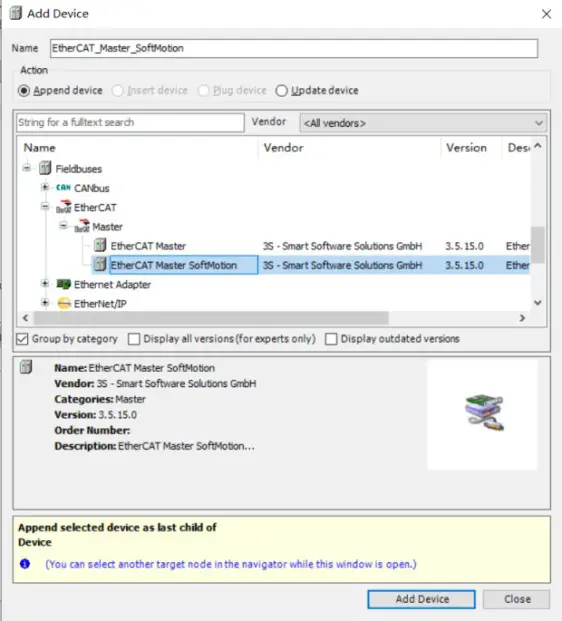
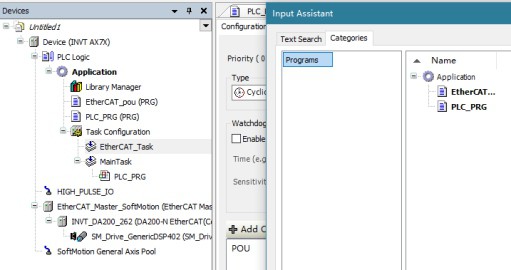
ステップ 2 [Device] ナビゲーション ツリーを右クリックします。 次に、[デバイスの追加] を選択します。 Ether CAT Master Soft Motion を選択します。
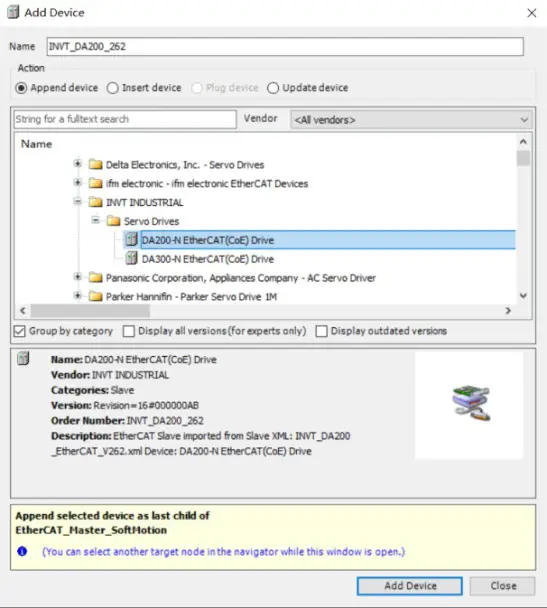
ステップ 3 右クリック EtherCAT_Master_SoftMotion 左側のナビゲーション ツリーにあります。 [デバイスの追加] を選択します。 表示されるウィンドウで DA200-N Ether CAT(CoE) ドライブを選択します。
ステップ 4 表示されるショートカット メニューで [SoftMotion CiA402 軸の追加] を選択します。
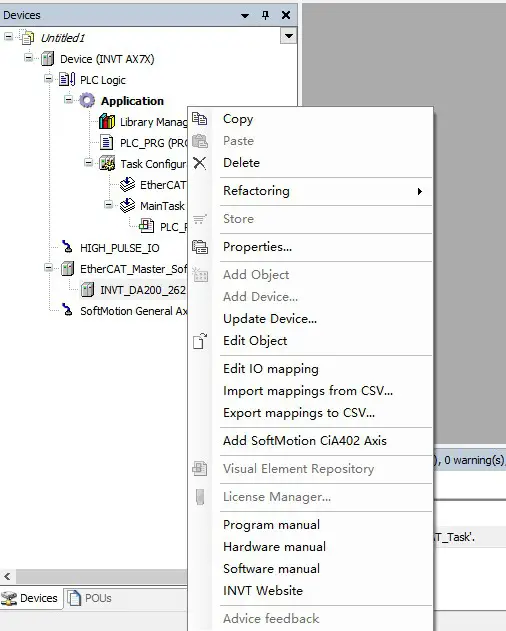
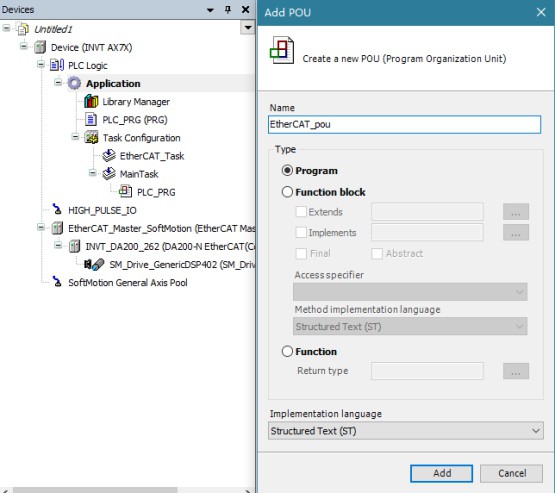
ステップ 5 左側のナビゲーション ツリーで [Application] を右クリックし、EtherCAT POU の追加を選択します。 自動生成された EtherCAT_Task をダブルクリックして起動します。 作成した EtherCAT_pou を選択します。 アプリケーション制御処理に基づいてアプリケーションプログラムを作成します。
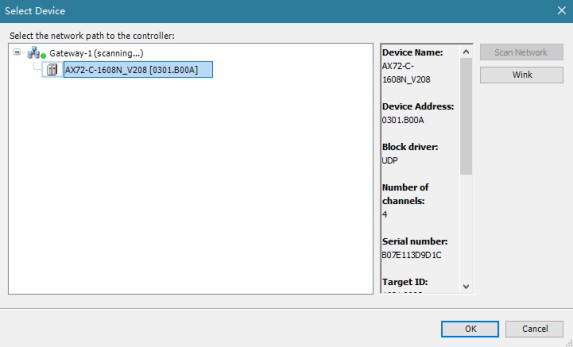
ステップ 6 [Device] ナビゲーション ツリーをダブルクリックし、[Scan Network] をクリックして、次の図に示す AX72-C-1608N を選択し、[Wink] をクリックします。 次に、[OK] をクリックします。
CPU システムインジケーターが点滅します。
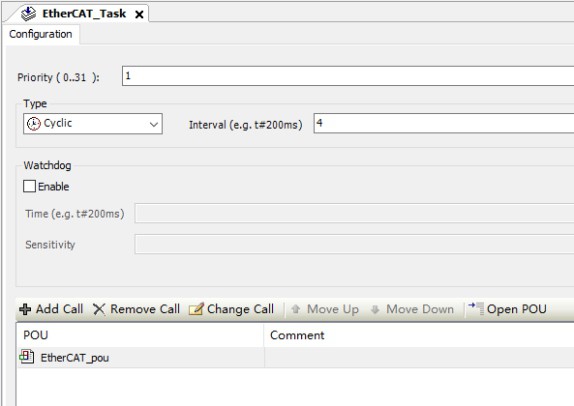
ステップ 7 左ペインの Task Configuration の下にある EtherCAT_Task をダブルクリックします。 タスクのリアルタイム要件に基づいて、タスクの優先度と実行間隔を設定します。
Invtmatic Studio では、 ![]() プログラムをコンパイルし、ログに従ってエラーを確認できます。 コンパイルが完全に正しいことを確認したら、
プログラムをコンパイルし、ログに従ってエラーを確認できます。 コンパイルが完全に正しいことを確認したら、 ![]() シーケンサにログインしてユーザプログラムをダウンロードし、シミュレーションデバッグを行うことができます。
シーケンサにログインしてユーザプログラムをダウンロードし、シミュレーションデバッグを行うことができます。
起動前チェックと予防保全
起動前チェック
配線が完了したら、モジュールの動作を開始する前に次のことを確認してください。
- モジュールの出力ケーブルは要件を満たしています。
- どのレベルの拡張インターフェースも確実に接続されています。
- アプリケーション プログラムは、正しい操作方法とパラメータ設定を使用します。
予防保守
次のように予防保守を実行します。
- シーケンサは定期的に清掃し、コントローラ内部への異物の混入を防ぎ、コントローラの通風・放熱を十分に行ってください。
- 保守手順を作成し、定期的にコントローラをテストしてください。
- 配線や端子がしっかりと固定されていることを定期的に確認してください。
詳細情報
詳細については、お気軽にお問い合わせください。 お問い合わせの際は、製品の型式とシリアル番号をお知らせください。
関連する製品またはサービスの情報を取得するには、次のことができます。
- INVT 現地オフィスにお問い合わせください。
- 訪問 www.invt.com.
- 次のQRコードをスキャンします。

顧客サービス センター、深セン INVT 電気株式会社
住所: INVT 光明テクノロジー ビルディング、ソンバイ ロード、マティアン、光明区、深セン、中国
著作権©INVT。 全著作権所有。 マニュアルの情報は、予告なしに変更される場合があります。

202207(V1.0)
ドキュメント / リソース
 |
invt AX7 シリーズ CPU モジュール [pdf] 取扱説明書 AX7シリーズCPUモジュール、AX7シリーズ、CPUモジュール、モジュール |



