![]()
AX7 ![]() 시리즈 CPU 모듈 사용 설명서
시리즈 CPU 모듈 사용 설명서
AX7 시리즈 CPU 모듈
AX 시리즈 프로그래머블 컨트롤러(약칭 프로그래머블 컨트롤러)를 선택해 주셔서 감사합니다.
Invtmatic Studio 플랫폼을 기반으로 하는 프로그래밍 가능 컨트롤러는 IEC61131-3 프로그래밍 시스템, EtherCAT 실시간 필드버스, CANopen 필드버스 및 고속 포트를 완벽하게 지원하고 전자 캠, 전자 기어 및 보간 기능을 제공합니다.
이 설명서는 주로 프로그래머블 컨트롤러의 CPU 모듈의 사양, 기능, 배선 및 사용 방법을 설명합니다. 제품을 안전하고 올바르게 사용하고 최대한 활용하려면 설치 전에 설명서를 주의 깊게 읽으십시오. 사용자 프로그램 개발 환경 및 사용자 프로그램 설계 방법에 대한 자세한 내용은 당사에서 발행하는 AX 시리즈 프로그래머블 컨트롤러 하드웨어 사용자 설명서 및 AX 시리즈 프로그래머블 컨트롤러 소프트웨어 사용자 설명서를 참조하십시오.
설명서는 사전 예고 없이 변경될 수 있습니다. 방문하시기 바랍니다 http://www.invt.com 최신 매뉴얼 버전을 다운로드합니다.
안전 예방 조치
경고
| 상징 | 이름 | 설명 | 약어 |
| 위험 |
위험 | 관련 요구 사항을 따르지 않으면 심각한 부상이나 심지어 사망에 이를 수도 있습니다. | |
| 경고 |
경고 | 관련 요구 사항을 따르지 않으면 부상이나 장비 손상이 발생할 수 있습니다. |
배송 및 설치
| • 교육을 받고 자격을 갖춘 전문가만 설치, 배선, 유지 보수 및 검사를 수행할 수 있습니다. • 프로그래머블 컨트롤러를 가연성 물질 위에 설치하지 마십시오. 또한 PLC에 가연성 물질이 닿거나 부착되지 않도록 하십시오. • 전기 장비에 대한 지식이 없는 사람이 실수로 장비 손상이나 감전을 초래할 수 있으므로 프로그래머블 컨트롤러를 IP20 이상의 잠금 가능한 제어 캐비닛에 설치하십시오. 관련 전기 지식 및 장비 작동 교육을 받은 사람만 제어 캐비닛을 작동할 수 있습니다. • 프로그래머블 컨트롤러가 손상되었거나 불완전한 경우 실행하지 마십시오. • d로 PLC에 접촉하지 마십시오.amp 물체 또는 신체 부위. 그렇지 않으면 감전될 수 있습니다. |
케이블 선택
| • 교육을 받고 자격을 갖춘 전문가만 설치, 배선, 유지 보수 및 검사를 수행할 수 있습니다. • 배선하기 전에 인터페이스 유형, 사양 및 관련 요구 사항을 완전히 이해하십시오. 그렇지 않으면 오배선의 원인이 됩니다. 비정상적인 실행. • PLC에 접속되어 있는 모든 전원을 차단한 후 배선하십시오. • 작동을 위해 전원을 켜기 전에 설치 및 배선이 완료된 후 각 모듈 단자 커버가 제자리에 제대로 설치되었는지 확인하십시오. 이렇게 하면 살아있는 단자에 닿는 것을 방지할 수 있습니다. 그렇지 않으면 신체 상해, 장비 오류 또는 작동 불능이 발생할 수 있습니다. • 프로그래밍 가능 컨트롤러에 외부 전원 공급 장치를 사용할 때 적절한 보호 구성 요소 또는 장치를 설치하십시오. 이렇게 하면 외부 전원 공급 장치 오류, 과전압으로 인해 프로그래밍 가능 컨트롤러가 손상되는 것을 방지할 수 있습니다.tage, 과전류 또는 기타 예외. |
시운전 및 실행
| • 운전을 위해 전원을 켜기 전에 프로그래머블 컨트롤러의 작업 환경이 요구 사항을 충족하는지, 배선이 올바른지, 입력 전원 사양이 요구 사항을 충족하는지, 보호 회로가 프로그래밍 가능한 컨트롤러를 보호하도록 설계되었는지 확인하십시오. 컨트롤러는 외부 장치 오류가 발생하더라도 안전하게 실행할 수 있습니다. • 외부 전원 공급이 필요한 모듈이나 단자의 경우 외부 전원 공급이나 장치 고장으로 인한 손상을 방지하기 위해 퓨즈, 회로 차단기 등의 외부 안전 장치를 구성하십시오. |
유지 보수 및 부품 교체
| • 교육을 받고 자격을 갖춘 전문가만 장비의 유지 보수, 검사 및 부품 교체를 수행할 수 있습니다. 프로그래머블 컨트롤러. • 단자 배선을 하기 전에 프로그래머블 컨트롤러에 연결된 모든 전원을 차단하십시오. • 유지 보수 및 부품 교체 시 나사, 케이블 및 기타 도전성 물질이 PLC 내부에 떨어지지 않도록 조치를 취하십시오. |
처분
| 프로그래머블 컨트롤러에는 중금속이 포함되어 있습니다. 스크랩 프로그래머블 컨트롤러는 산업 폐기물로 폐기하십시오. | |
| 스크랩 제품을 적절한 수거 장소에 따로 폐기하되 일반 폐기물 흐름에 넣지 마십시오. |
제품 소개
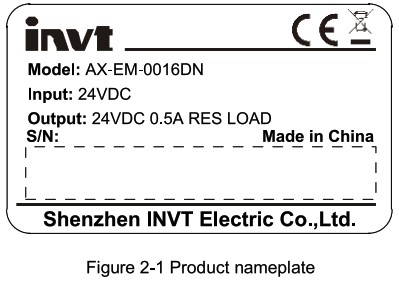
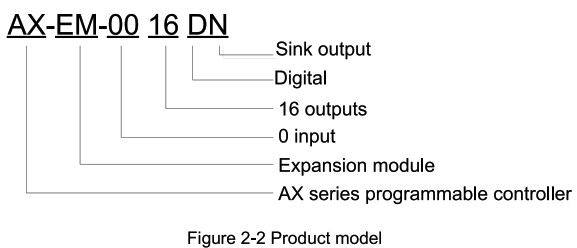
모델 및 명판
기능이 끝났습니다view
프로그래머블 컨트롤러의 주요 제어 모듈인 AX7J-C-1608L] CPU 모듈(약칭 CPU 모듈)은 다음과 같은 기능을 가지고 있습니다.
- 실행 중인 시스템에 대한 제어, 모니터링, 데이터 처리, 네트워킹 통신을 실현합니다.
- INVT가 프로그래밍을 위해 출시한 Invtmatic Studio 플랫폼을 사용하여 IEC61131-3 표준을 준수하는 IL, ST, FBD, LD, CFC 및 SFC 프로그래밍 언어를 지원합니다.
- 16개의 로컬 확장 모듈(I/O, 온도, 아날로그 모듈 등)을 지원합니다.
- 슬레이브 모듈을 연결하기 위해 Ether CAT 또는 CAN 오픈 버스를 사용하며, 각 슬레이브 모듈은 16개의 확장 모듈(I/O, 온도 및 아날로그 모듈 등)을 지원합니다.
- Modbus TCP 마스터/슬레이브 프로토콜을 지원합니다.
- 두 개의 RS485 인터페이스를 통합하여 Modbus RTU 마스터/슬레이브 프로토콜을 지원합니다.
- 고속 I/O, 16개의 고속 입력 및 8개의 고속 출력을 지원합니다.
- 1ms, 2ms, 4ms 또는 8ms의 동기화 시간으로 EtherCAT 필드버스 모션 제어를 지원합니다.
- 2~4축 선형 보간 및 2축 원호 보간을 포함하여 펄스 기반 단일 또는 다축 모션 제어를 지원합니다.
- 실시간 시계를 지원합니다.
- 정전 시 데이터 보호를 지원합니다.
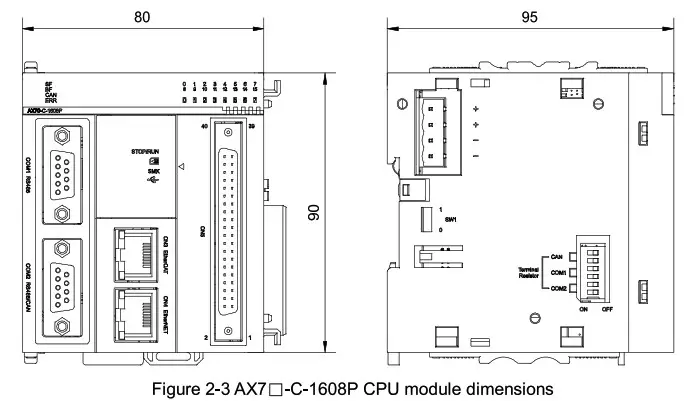
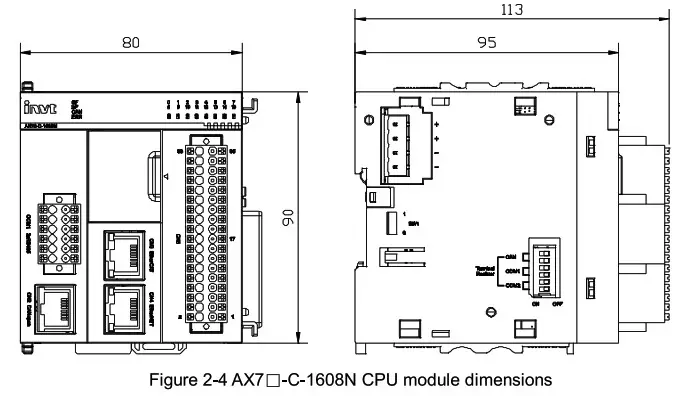
구조 치수
구조적 치수(단위: mm)는 다음 그림과 같습니다.
인터페이스
인터페이스 설명
인터페이스 배포
그림 3-1과 그림 3-2는 CPU 모듈 인터페이스 분포를 보여줍니다. 각 인터페이스에 대해 해당 실크 스크린 설명이 근처에 제공되어 배선, 작동 및 점검이 용이합니다.
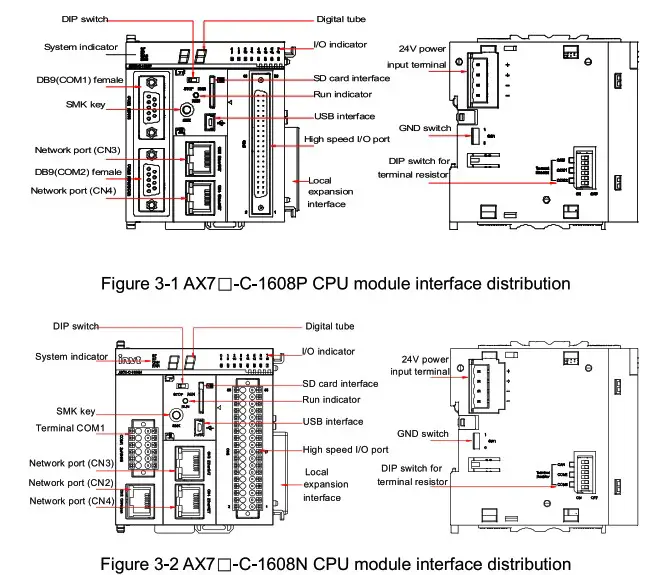
| 인터페이스 | 기능 | |
| 딥 스위치 | RUN/STOP DIP 스위치. | |
| 시스템 표시기 | SF: 시스템 오류 표시기. BF: 버스 오류 표시기. CAN: CAN 버스 오류 표시기. ERR: 모듈 오류 표시기. |
|
| SMK 키 | SMK 스마트키. | |
| WO-C-1608P | COM1 (DB9) 여성 |
Modbus RTU를 지원하는 RS485 인터페이스 XNUMX개 마스터/슬레이브 프로토콜. |
| COM2 (DB9) 여성 |
한 RS485 인터페이스와 다른 CAN 인터페이스 RS485 인터페이스는 Modbus RTU 마스터/슬레이브 프로토콜을 지원하고 다른 CAN 인터페이스는 CANopen 마스터/슬레이브 프로토콜을 지원합니다. |
|
| AX70-C-1608N | COM1&COM2(푸시인 n단자) | Modbus RTU를 지원하는 485개의 RSXNUMX 인터페이스 마스터/슬레이브 프로토콜. |
| CN2(RJ45) | CAN 인터페이스, CAN 오픈 마스터/슬레이브 프로토콜 지원. | |
| CN3(RJ45) | 에테르 CAT 인터페이스 | |
| CN4(RJ45) | 1.모드버스 TCP 프로토콜 2. 표준 이더넷 기능 3. 사용자 프로그램 다운로드 및 디버깅(IPv4만 해당) |
|
| 디지털 튜브 | SMK 키를 누르면 알람과 응답이 표시됩니다. | |
| I/O 표시기 | 16개 입력과 8개 출력 신호가 유효한지 여부를 나타냅니다. | |
| SD 카드 인터페이스 | 사용자 프로그램과 데이터를 저장하는 데 사용됩니다. | |
| 실행 표시기 | CPU 모듈이 실행 중인지 여부를 나타냅니다. | |
| USB 인터페이스 | 프로그램을 다운로드하고 디버깅하는 데 사용됩니다. | |
| 고속 I/O | 고속 입력 16개와 고속 출력 8개. | |
| 로컬 확장 인터페이스 | 핫 스와핑을 허용하지 않고도 16개의 I/O 모듈 확장을 지원합니다. | |
| 24V 전원 인터페이스 | DC 24V 권tag전자 입력 | |
| 접지 스위치 | 시스템 내부 디지털 접지와 하우징 접지 사이의 연결 스위치입니다. 기본적으로 연결이 끊어져 있습니다(SW1은 0으로 설정됨). 시스템 내부 디지털 접지가 기준 평면으로 사용되는 특수한 시나리오에서만 사용됩니다. 작동하기 전에 주의하세요. 그렇지 않으면 시스템 안정성에 영향을 미칩니다. | |
| 종단저항의 DIP 스위치 | ON은 단자 저항 연결을 나타냅니다(기본적으로 OFF). COM1은 RS485-1에 해당하고, COM2는 RS485-2에 해당하고, CAN은 CAN에 해당합니다. | |
SMK 키
SMK 키는 주로 CPU 모듈 IP 주소(rP)를 재설정하고 애플리케이션 프로그램(cA)을 지우는 데 사용됩니다. 기본 CPU 모듈 주소는 192.168.1.10입니다. 수정된 IP 주소에서 기본 주소를 복원하려면 SMK 키를 통해 기본 주소를 복원할 수 있습니다. 방법은 다음과 같습니다.
- CPU 모듈을 STOP 상태로 설정합니다. SMK 키를 누릅니다. 디지털 튜브에 "rP"가 표시되면 SMK 키를 길게 누릅니다. 그러면 디지털 튜브에 "rP"가 표시되고 번갈아 꺼지며 IP 주소 재설정이 수행 중임을 나타냅니다. 디지털 튜브가 계속 꺼지면 재설정 작업이 성공합니다. 이때 SMK 키를 놓으면 디지털 튜브에 "rP"가 표시됩니다. 튜브에 "00"이 표시될 때까지 SMK 키를 길게 누릅니다(rP—cA—rU-rP).
- 디지털 튜브가 “rP”를 표시하고 교대로 꺼지는 과정 중에 SMK 키를 놓으면 IP주소 재설정 동작이 취소되고 디지털 튜브에 “rP”가 표시됩니다.
CPU 모듈에서 프로그램을 지우려면 다음과 같이 하십시오.
SMK 키를 누릅니다. 디지털 튜브에 "cA"가 표시되면 SMK 키를 길게 누릅니다. 그러면 디지털 튜브에 "rP"가 표시되고 번갈아 꺼지면서 프로그램이 지워지고 있음을 나타냅니다. 디지털 튜브가 계속 꺼지면 CPU 모듈을 다시 시작합니다. 프로그램이 성공적으로 지워졌습니다.
디지털 튜브 설명
- 다운로드 후 프로그램에 오류가 없으면 CPU 모듈의 디지털 튜브에 "00"이 꾸준히 표시됩니다.
- 프로그램에 오류가 있으면 디지털 튜브가 깜박이는 방식으로 오류 정보를 표시합니다.
- 예를 들어ample, 만약 오류 19만 발생하면 디지털 튜브는 "19"를 표시하고 교대로 꺼집니다. 오류 19와 오류 29가 동시에 발생하면 디지털 튜브는 "19"를 표시하고 꺼지고 "29"를 표시하고 교대로 꺼집니다. 더 많은 오류가 동시에 발생하면 표시 방식이 비슷합니다.
터미널 정의
AX7![]() -C-1608P COM1/COM2 통신단자 정의
-C-1608P COM1/COM2 통신단자 정의
AX7LJ-C-1608P CPU 모듈의 경우 COM1은 RS485 통신 단자이고 COM2는 RS485/CAN 통신 단자이며, 둘 다 데이터 전송을 위해 DB9 커넥터를 사용합니다. 인터페이스와 핀은 다음에 설명되어 있습니다.
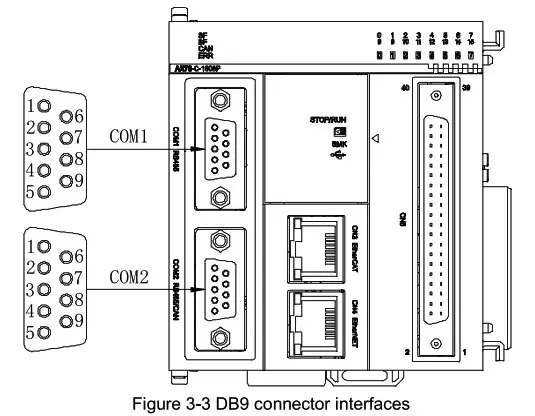
표 3-1 COM1/COM2 DB39 커넥터 핀
| 인터페이스 | 분포 | 핀 | 정의 | 기능 |
| COM1 (RS485) |
1 | / | / | |
| 2 | / | / | ||
| 3 | / | / | ||
| 4 | RS485A | RS485 차동 신호 + | ||
| 5 | RS485B | RS485 차동 신호 – | ||
| 6 | / | / | ||
| 7 | / | / | ||
| 8 | / | / | ||
| 9 | GND_RS485 | RS485 전원 접지 | ||
| COM2 (RS485/CAN) |
1 | / | / | |
| 2 | 수 _L | CAN 차동 신호 – | ||
| 3 | / | / | ||
| 4 | RS485A | RS485 차동 신호 + | ||
| 5 | RS485B | RS485 차동 신호 – | ||
| 6 | 접지_캔 | CAN 전원 접지 | ||
| 7 | 수 _H | CAN 차동 신호 + | ||
| 8 | / | / | ||
| 9 | GND_RS485 | RS485 전원 접지 |
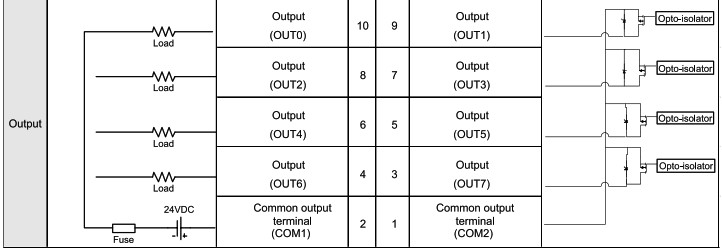
AX7![]() -C-1608P 고속 I/O 단말 정의
-C-1608P 고속 I/O 단말 정의
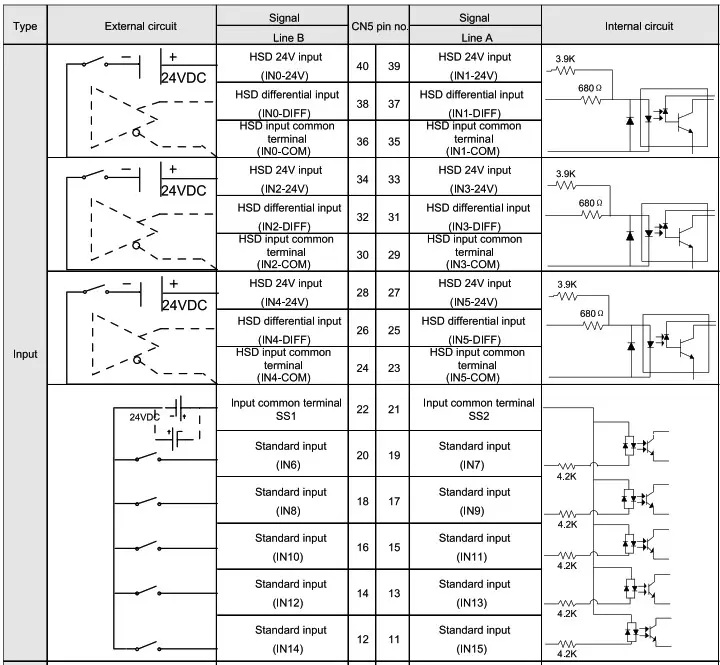
AX7![]() -C-1608P CPU 모듈은 16개의 고속 입력과 8개의 고속 출력을 가지고 있습니다. 인터페이스와 핀은 다음에 설명되어 있습니다.
-C-1608P CPU 모듈은 16개의 고속 입력과 8개의 고속 출력을 가지고 있습니다. 인터페이스와 핀은 다음에 설명되어 있습니다.
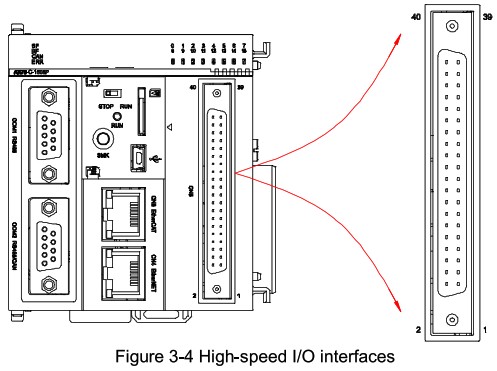
표 3-2 고속 I/O 핀
AX7![]() -C-1608N COM1/CN2 통신단자 정의
-C-1608N COM1/CN2 통신단자 정의
AX7의 경우![]() -C-1608N CPU 모듈, COM1은 485채널 RS12 통신 단자로, 데이터 전송을 위해 2핀 푸시인 커넥터를 사용합니다. CN45는 CAN 통신 단자로, 데이터 전송을 위해 RJXNUMX 커넥터를 사용합니다. 인터페이스와 핀은 다음과 같습니다.
-C-1608N CPU 모듈, COM1은 485채널 RS12 통신 단자로, 데이터 전송을 위해 2핀 푸시인 커넥터를 사용합니다. CN45는 CAN 통신 단자로, 데이터 전송을 위해 RJXNUMX 커넥터를 사용합니다. 인터페이스와 핀은 다음과 같습니다.

표 3-3 COM1/CN2 커넥터 핀
| COM1의 Push-in 단자 기능 | ||||
| 정의 | 기능 | 핀 | ||
| COM1 RS485 | A | RS485 차동 신호 + |
12 | |
| B | RS485 차동 신호 – | 10 | ||
| 접지 | RS485 _1칩 전원 지면 |
8 | ||
| PE | 실드 그라운드 | 6 | ||
| COM2 RS485 | A | RS485 차동 신호 + |
11 | |
| B | RS485 차동 신호 – | 9 | ||
| 접지 | RS485_2 칩 전원 지면 |
7 | ||
| PE | 실드 그라운드 | 5 | ||
| 참고: 핀 1~4는 사용되지 않습니다. | ||||
| CN2의 핀 기능 | ||||
| 정의 | 기능 | 핀 | ||
| CANopen | 접지 | CAN 전원 접지 | 1 | |
| CAN_L | CAN 차동 신호 – | 7 | ||
| CAN_H | CAN 차동 신호 + | 8 | ||
| 참고: 핀 2~6는 사용되지 않습니다. | ||||
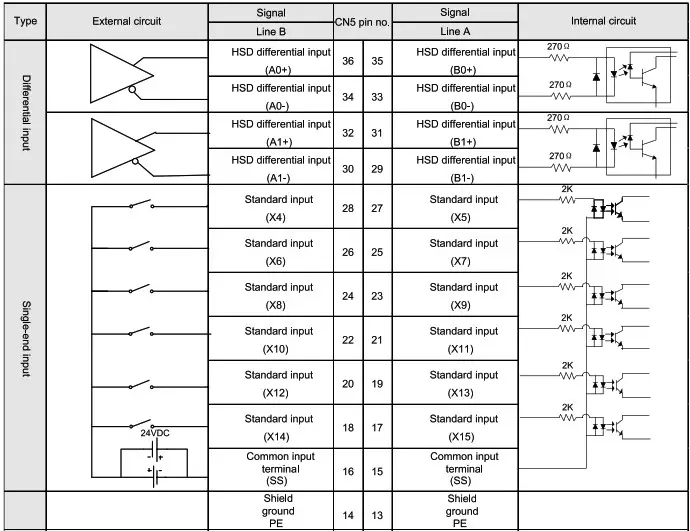
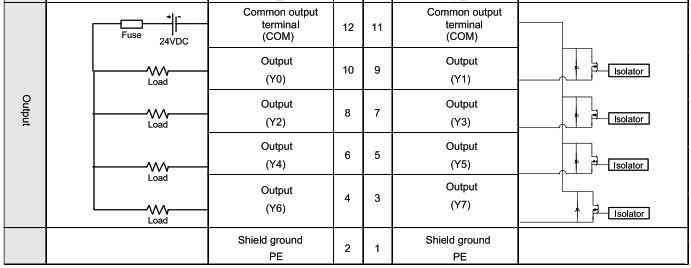
AX7![]() -C-1608N 고속 I/O 단말 정의
-C-1608N 고속 I/O 단말 정의
AX7![]() 1-C-1608N CPU 모듈은 16개의 고속 입력과 8개의 고속 출력을 가지고 있습니다. 다음 그림은 터미널 분배를 보여주고 다음 표는 핀을 나열합니다.
1-C-1608N CPU 모듈은 16개의 고속 입력과 8개의 고속 출력을 가지고 있습니다. 다음 그림은 터미널 분배를 보여주고 다음 표는 핀을 나열합니다.
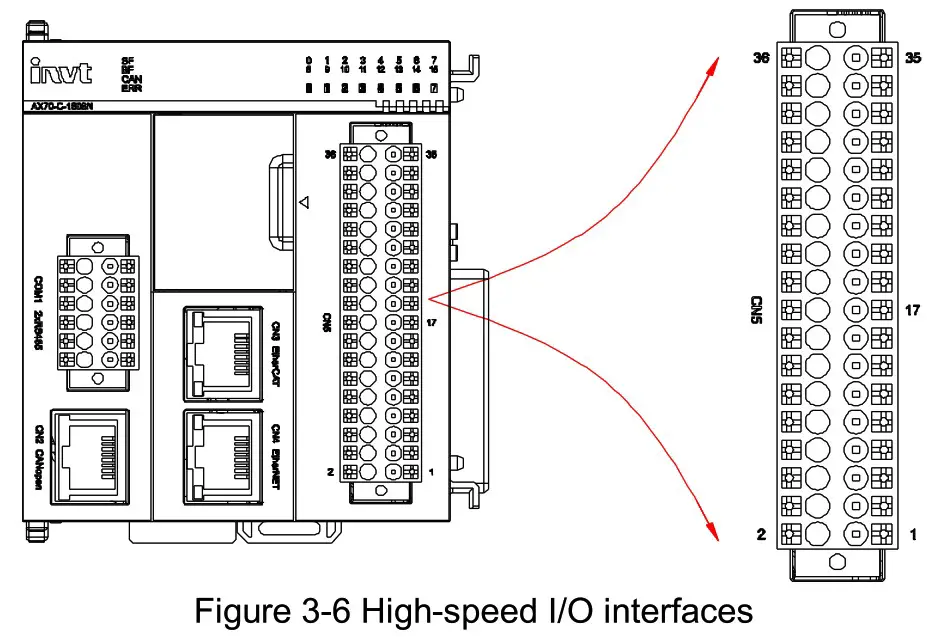
표 3-4 고속 I/O 핀
메모:
- AX16의 모든 7개 입력 채널
 -C-1608P CPU 모듈은 고속 입력을 허용하지만, 첫 6개 채널은 24V 싱글 엔드 또는 차동 입력을 지원하고 마지막 10개 채널은 24V 싱글 엔드 입력을 지원합니다.
-C-1608P CPU 모듈은 고속 입력을 허용하지만, 첫 6개 채널은 24V 싱글 엔드 또는 차동 입력을 지원하고 마지막 10개 채널은 24V 싱글 엔드 입력을 지원합니다. - AX16의 모든 7개 입력 채널-C-1608N CPU 모듈은 고속 입력을 허용하지만, 첫 번째 4개 채널은 차동 입력을 지원하고 마지막 12개 채널은 24V 싱글 엔드 입력을 지원합니다.
- 각 I/O 포인트는 내부 회로와 분리되어 있습니다.
- 고속 I/O 포트 연결 케이블의 총 길이는 3m를 초과할 수 없습니다.
- 케이블을 고정할 때 케이블을 구부리지 마십시오.
- 케이블 라우팅 시, 강한 간섭을 일으키는 고전력 케이블에서 연결 케이블을 분리하지만, 연결 케이블을 후자와 함께 묶지 마십시오. 또한, 장거리 병렬 라우팅은 피하십시오.
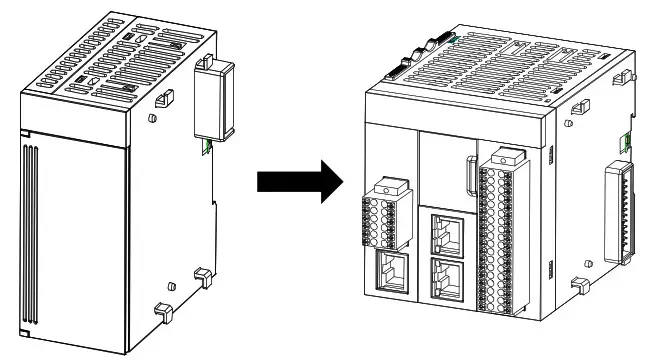
모듈 설치
모듈형 설계를 사용하여 프로그래밍 가능한 컨트롤러는 설치 및 유지 관리가 쉽습니다. CPU 모듈의 경우 주요 연결 객체는 전원 공급 및 확장 모듈입니다.
모듈은 모듈 제공 연결 인터페이스 및 스냅핏을 사용하여 연결됩니다.
장착 절차는 다음과 같습니다.
| 1단계 CPU 모듈의 스냅핏을 다음 그림과 같은 방향으로 밀어 넣습니다(전원 모듈 사용) 전직에 대한 연결amp르). |
2단계 CPU 모듈을 전원 모듈 커넥터에 맞춰서 맞물리게 합니다. |
 |
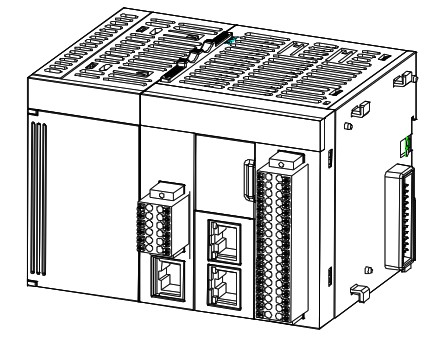 |
| 3단계 CPU 모듈의 스냅핏을 다음 그림과 같은 방향으로 밀어 두 모듈을 연결하고 잠급니다. | 4단계 표준 DIN 레일 설치의 경우 딸깍 소리가 날 때까지 해당 모듈을 표준 설치 레일에 겁니다. |
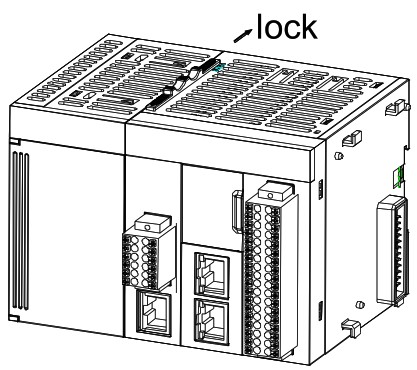 |
 |
케이블 연결 및 사양
Ether CAT 버스 연결
Ether CAT 버스 사양
| 목 | 설명 |
| 통신 프로토콜 | 에테르 고양이 |
| 지원 서비스 | COE(PDO/SDO) |
| 최소 동기화 간격 | 1ms/4축(일반적인 값) |
| 동기화 방법 | 동기화용 DC/DC 미사용 |
| 물리 계층 | 100베이스-TX |
| 이중 모드 | 풀 듀플렉스 |
| 토폴로지 구조 | 직렬 연결 |
| 전송 매체 | 네트워크 케이블(섹션 "케이블 선택" 참조) |
| 전송거리 | 두 노드 사이가 100m 이내 |
| 슬레이브 노드의 수 | 최대 125개 |
| Ether CAT 프레임 길이 | 44바이트-1498바이트 |
| 프로세스 데이터 | 단일 프레임에 최대 1486바이트 포함 |
케이블 선택
CPU 모듈은 CN3 포트를 통해 Ether CAT 버스 통신을 구현할 수 있습니다. INVT 표준 케이블을 권장합니다. 통신 케이블을 직접 만드는 경우 케이블이 다음 요구 사항을 충족하는지 확인하십시오.
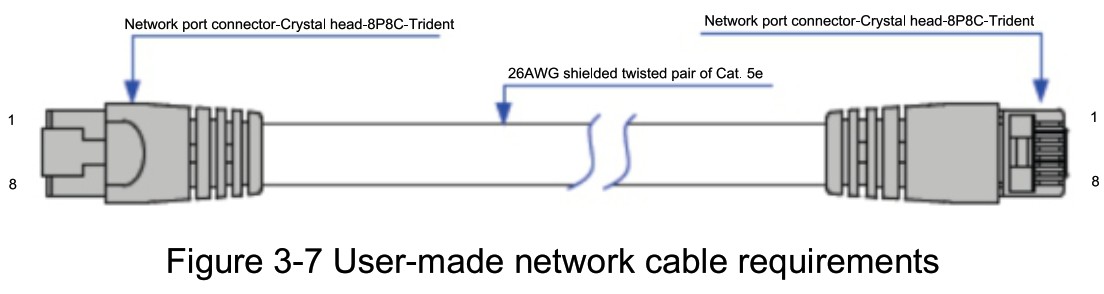
메모:
- 사용하는 통신 케이블은 단락, 개방, 탈구 또는 접촉 불량 없이 전도도 테스트를 100% 통과해야 합니다.
- 통신 품질을 보장하기 위해 EtherCAT 통신 케이블 길이는 100m를 초과할 수 없습니다.
- EIA/TIA5A, EN568, ISO/IEC50173, EIA/TIA bulletin TSB, EIA/TIA SB11801-A&TSB40을 준수하는 36e 범주의 차폐 꼬임 쌍 케이블을 사용하여 통신 케이블을 만드는 것이 좋습니다.
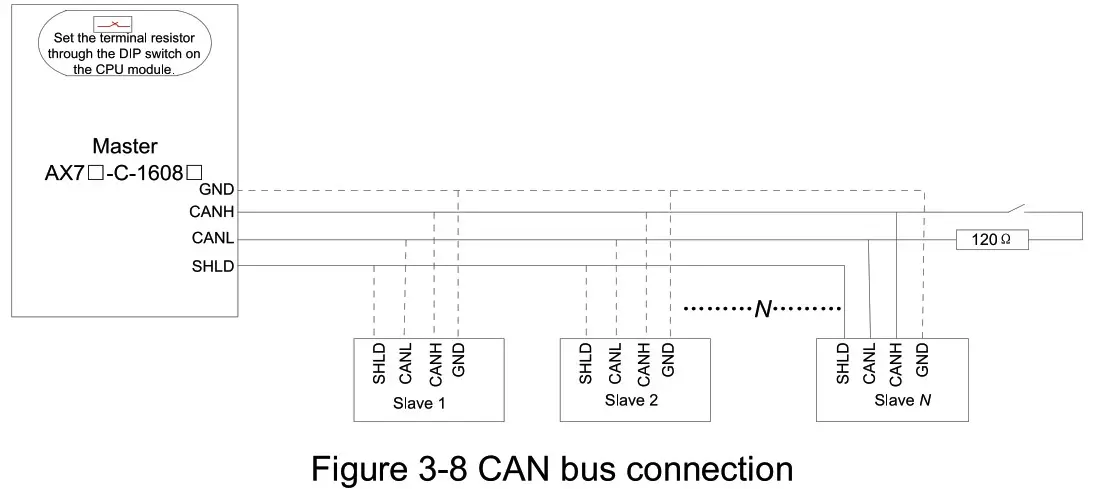
CAN 오픈 케이블 연결
네트워킹
CAN 버스 연결 토폴로지 구조는 다음 그림에 나와 있습니다. CAN 버스 연결에는 차폐된 꼬인 쌍을 사용하는 것이 좋습니다. CAN 버스의 각 끝은 신호 반사를 방지하기 위해 1200 단자 저항기에 연결됩니다. 대부분의 경우 차폐 층은 단일 지점 접지를 사용합니다.
케이블 선택
- AX7의 경우-C-1608P CPU 모듈, CANopen 통신과 RS485 통신에 동일한 단자를 사용하고 데이터 전송을 위해 DB9 커넥터를 사용합니다. DB9 커넥터의 핀은 이전에 설명했습니다.
- AX7의 경우1-C-1608N CPU 모듈, RJ45 단자는 데이터 전송을 위한 CANopen 통신에 사용됩니다. RJ45 커넥터의 핀은 이전에 설명되었습니다.
INVT 표준 케이블을 권장합니다. 통신 케이블을 직접 만드는 경우 핀 설명에 따라 케이블을 만들고 제조 공정과 기술 매개변수가 통신 요구 사항을 충족하는지 확인하십시오.
메모:
- 케이블의 간섭 방지 기능을 강화하려면 케이블을 제작할 때 알루미늄 호일 차폐 및 알루미늄-마그네슘 브레이드 차폐 기술을 사용하는 것이 좋습니다.
- 차동 케이블에는 꼬인 쌍 권선 기술을 사용합니다.
RS485 직렬 통신 연결
CPU 모듈은 2개의 RS485 통신 채널을 지원합니다.
- AX7의 경우-C-1608P CPU 모듈, 포트 COM1 및 COM2는 데이터 전송을 위해 DB9 커넥터를 사용합니다. DB9 커넥터의 핀은 이전에 설명했습니다.
- AX7의 경우-C-1608N CPU 모듈, 포트는 데이터 전송을 위해 12핀 푸시인 터미널 커넥터를 사용합니다. 터미널 커넥터의 핀은 이전에 설명했습니다.
INVT 표준 케이블을 권장합니다. 통신 케이블을 직접 만드는 경우 핀 설명에 따라 케이블을 만들고 제조 공정과 기술 매개변수가 통신 요구 사항을 충족하는지 확인하십시오.
메모:
- 케이블의 간섭 방지 기능을 강화하려면 케이블을 제작할 때 알루미늄 호일 차폐 및 알루미늄-마그네슘 브레이드 차폐 기술을 사용하는 것이 좋습니다.
- 차동 케이블에는 꼬인 쌍 권선 기술을 사용합니다.
이더넷 연결
네트워킹
CPU 모듈의 이더넷 포트는 CN4이며, 네트워크 케이블을 사용하여 지점 간 모드로 컴퓨터나 HMI 장치 등의 다른 장치에 연결할 수 있습니다.
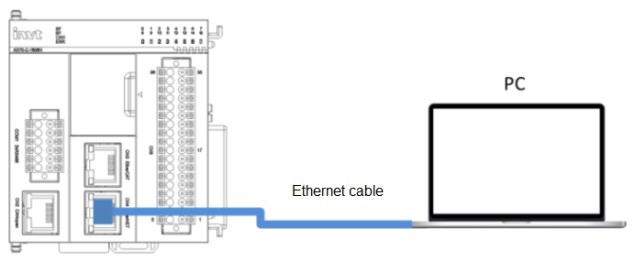
그림 3-9 이더넷 연결
네트워크 케이블을 사용하여 이더넷 포트를 허브나 스위치에 연결하여 다중 지점 연결을 구현할 수도 있습니다.

그림 3-10 이더넷 네트워킹
케이블 선택
통신 신뢰성을 개선하려면 이더넷 케이블로 5등급 이상의 차폐 꼬임 쌍 케이블을 사용하십시오. INVT 표준 케이블을 권장합니다.
사용 설명서를 사용하세요
기술적 매개변수
CPU 모듈 일반 사양
| 목 | 설명 | |||||
| 입력 볼륨tage | 24VDC | |||||
| 전력 소모량 | < 15주 | |||||
| 정전 보호 시간 |
300ms (전원 켜기 후 20초 이내에 보호 기능 없음) | |||||
| 백업 배터리 실시간 시계 |
지원됨 | |||||
| 백플레인 버스 전원 공급 |
5V/2.5A | |||||
| 프로그래밍 방법 | IEC 61131-3 프로그래밍 언어(LD, FBD, IL, ST, SFC, 및 CFC) |
|||||
| 프로그램 실행 방법 |
로컬 온라인 | |||||
| 사용자 프로그램 저장 공간 |
10MB | |||||
| 플래시 메모리 공간 정전 시 보호 |
512KB | |||||
| SD 카드 명세서 |
32G 마이크로SD | |||||
| 부드러운 요소와 형질 |
||||||
| 요소 | 이름 | 세다 | 저장 특성 | |||
| 기본 | 쓰기 가능 | 설명 | ||||
| I | 입력 릴레이 | 64K단어 | 저장하지 않음 | 아니요 | X: 1비트 B. 8비트 W: 16비트 D: 32비트 L: 64비트 | |
| Q | 출력 릴레이 | 64K단어 | 저장하지 않음 | 아니요 | ||
| M | 보조 출력 | 256K단어 | 구하다 | 예 | ||
| 프로그램 유지 전원에 대한 방법 실패 |
내부 플래시에 의한 보존 | |||||
| 인터럽트 모드 | CPU 모듈의 고속 DI 신호를 인터럽트 입력으로 설정하여 최대 8점의 입력이 가능하며, 상승 에지 및 하강 에지 인터럽트 모드를 설정할 수 있습니다. | |||||
고속 I/O 사양
고속 입력 사양
| 목 | 사양 | |
| 신호 이름 | 고속 차동 입력 | 고속 싱글엔드 입력 |
| 정격 입력 권tage |
2.5V | 24VDC(-15% — +20%, 맥동 5% 이내 |
| 정격 입력 현재의 |
6.8mA | 5.7mA(일반 값)(24V DC에서) |
| ON 전류 | / | 2mA 이하 |
| 오프 전류 | / | 1mA 이하 |
| 입력 저항 | 5400 | 2.2k0 |
| 최대 카운팅 속도 |
800K 펄스/초(2PH 200배 주파수), XNUMXkHz(단일 입력 채널) | |
| 2PH 입력 듀티 비율 |
40 %. 60 % | |
| 공통 단자 | / | 하나의 공통 터미널이 사용됩니다. |
고속 출력 사양
| 목 | 명세서 |
| 신호 이름 | 출력(YO—Y7) |
| 출력 극성 | AX7 AX7 |
| 제어 회로 voltage | 직류 5V-24V |
| 정격 부하 전류 | 100mA/점, 1A/COM |
| 최대 권tagON에서 e 드롭 | 0.2V(일반적인 값) |
| OFF 시 누설 전류 | 0.1mA 이하 |
| 출력 주파수 | 200kHz (200kHz의 출력은 외부 연결 등가 부하가 12mA보다 커야 합니다.) |
| 공통 단자 | 8개 지점마다 하나의 공통 단자를 사용합니다. |
메모:
- 고속 I/O 포트는 허용 주파수에 제한이 있습니다. 입력 또는 출력 주파수가 허용 값을 초과하면 제어 및 식별이 비정상적일 수 있습니다. I/O 포트를 적절히 배치하십시오.
- 고속 차동 입력 인터페이스는 7V 이상의 차압 입력 레벨을 허용하지 않습니다. 그렇지 않으면 입력 회로가 손상될 수 있습니다.
프로그래밍 소프트웨어 소개 및 다운로드
프로그래밍 소프트웨어 소개
INVTMATIC Studio는 INVT가 개발한 프로그래밍 가능 컨트롤러 프로그래밍 소프트웨어입니다. IEC 61131-3을 준수하는 프로그래밍 언어를 기반으로 하는 프로젝트 개발을 위한 고급 기술과 강력한 기능을 갖춘 개방적이고 완벽하게 통합된 프로그래밍 개발 환경을 제공합니다. 에너지, 운송, 도시, 야금, 화학, 제약, 식품, 섬유, 포장, 인쇄, 고무 및 플라스틱, 공작 기계 및 이와 유사한 산업에서 널리 사용됩니다.
실행 환경 및 다운로드
Invtmatic Studio를 데스크톱이나 휴대용 컴퓨터에 설치할 수 있으며, 운영 체제는 최소 Windows 7이고, 메모리 공간은 최소 2GB, 여유 하드웨어 공간은 최소 10GB이며, CPU 주 주파수는 2GHz 이상입니다. 그런 다음 네트워크 케이블을 통해 컴퓨터를 프로그래밍 가능 컨트롤러의 CPU 모듈에 연결하고 Invtmatic Studio 소프트웨어를 통해 사용자 프로그램을 편집하여 사용자 프로그램을 다운로드하고 디버깅할 수 있습니다.
프로그래밍 인스턴스
다음은 ex를 사용하여 프로그래밍을 수행하는 방법을 설명합니다.amp(AX72-C-1608N).
먼저, 전원 공급 장치를 CPU 모듈에 연결하고, CPU 모듈을 Invtmatic Studio가 설치된 컴퓨터와 필요한 확장 모듈에 연결하고, EtherCAT 버스를 모터 드라이브에 연결하는 등 프로그래밍 가능 컨트롤러의 모든 하드웨어 모듈을 연결합니다. Invtmatic Studio를 시작하여 프로젝트를 만들고 프로그래밍 구성을 수행합니다.
절차는 다음과 같습니다.
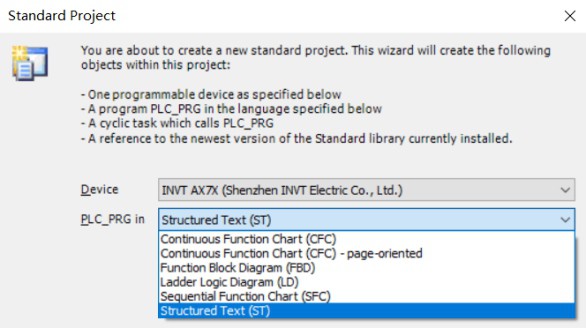
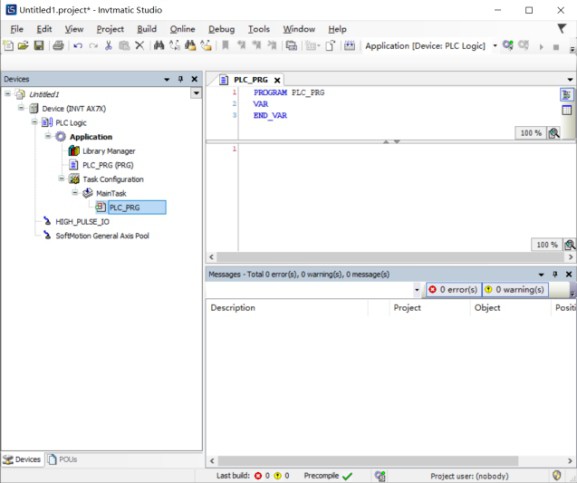
1 단계 선택 File > 새 프로젝트, 표준 프로젝트 유형을 선택하고 프로젝트 저장 위치와 이름을 설정합니다. 확인을 클릭합니다. 그런 다음 나타나는 표준 프로젝트 구성 창에서 INVT AX7X 장치와 구조화된 텍스트(ST) 프로그래밍 언어를 선택합니다. CODESYS 구성 및 프로그래밍 인터페이스가 나타납니다.
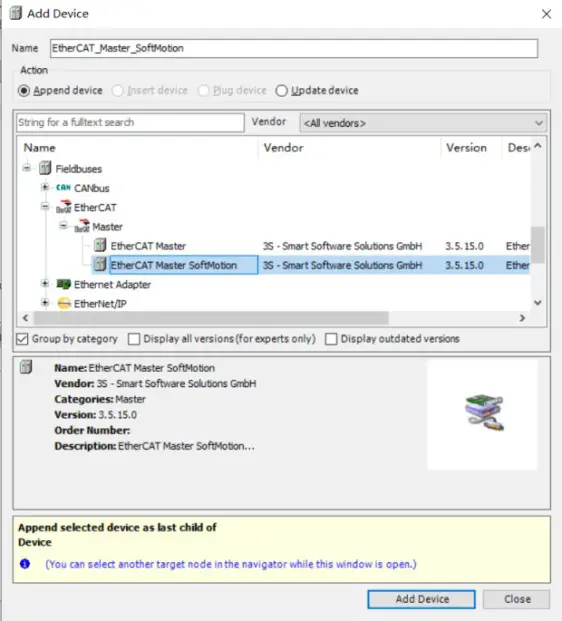
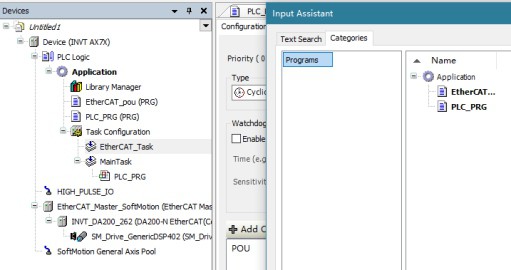
2단계 장치 탐색 트리를 마우스 오른쪽 버튼으로 클릭합니다. 그런 다음 장치 추가를 선택합니다. Ether CAT Master Soft Motion을 선택합니다.
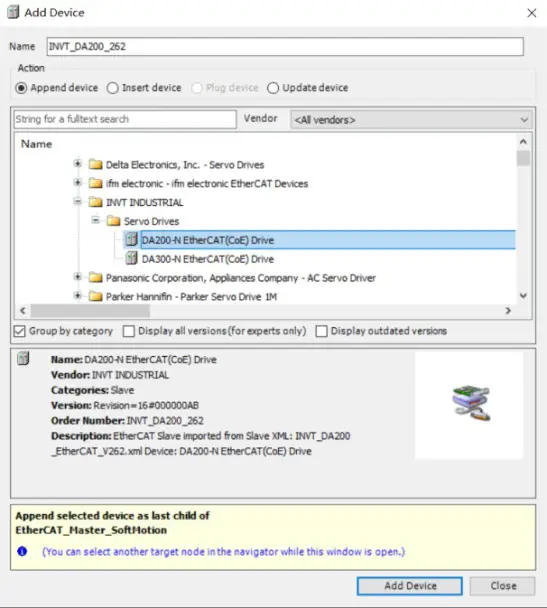
3단계 마우스 오른쪽 클릭 EtherCAT_마스터_소프트모션 왼쪽 탐색 트리에서 장치 추가를 선택합니다. 나타나는 창에서 DA200-N Ether CAT(CoE) 드라이브를 선택합니다.
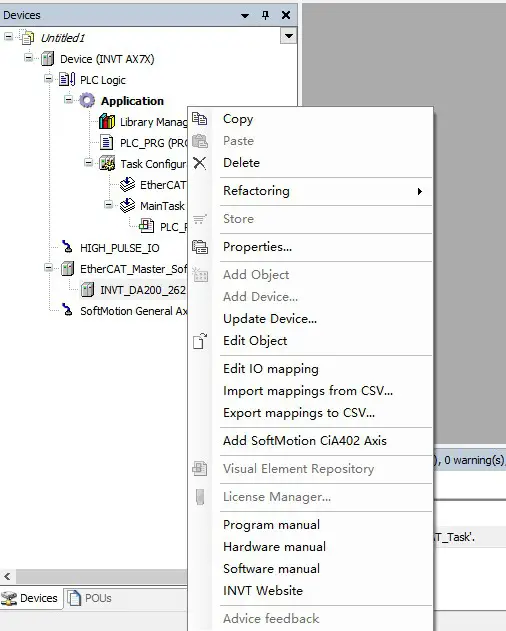
4단계 나타나는 바로가기 메뉴에서 SoftMotion CiA402 축 추가를 선택합니다.
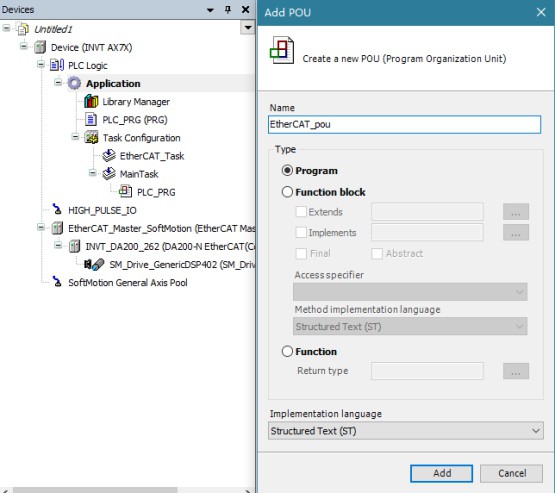
5단계 왼쪽 탐색 트리에서 애플리케이션을 마우스 오른쪽 버튼으로 클릭하고 EtherCAT POU를 추가하도록 선택합니다. 자동으로 생성된 EtherCAT_Task를 두 번 클릭하여 호출합니다. 생성된 EtherCAT_pou를 선택합니다. 애플리케이션 제어 프로세스를 기반으로 애플리케이션 프로그램을 작성합니다.
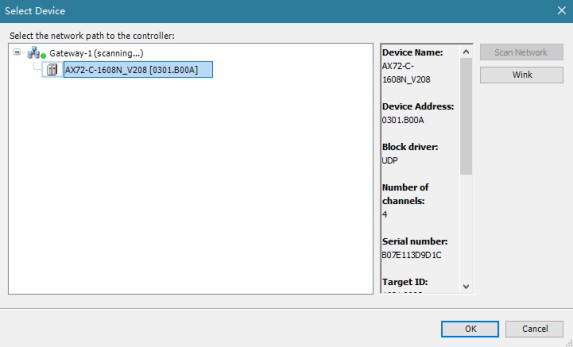
6단계 장치 탐색 트리를 두 번 클릭하고 네트워크 스캔을 클릭하고 다음 그림에 표시된 AX72-C-1608N을 선택하고 윙크를 클릭합니다. 그런 다음 확인을 클릭합니다.
CPU 시스템 표시등이 깜박입니다.
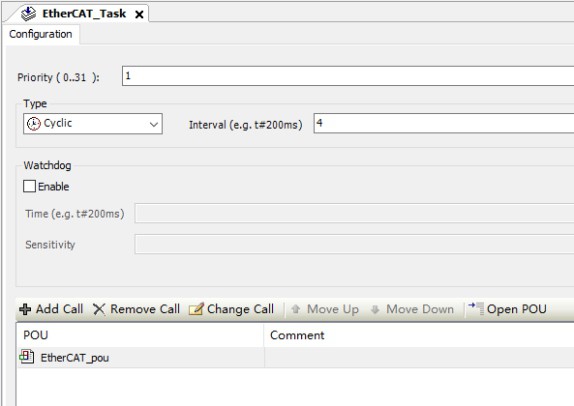
7단계 왼쪽 창의 작업 구성에서 EtherCAT_Task를 두 번 클릭합니다. 작업 실시간 요구 사항에 따라 작업 우선순위와 실행 간격을 설정합니다.
Invtmatic Studio에서는 다음을 클릭할 수 있습니다. ![]() 프로그램을 컴파일하고 로그에 따라 오류를 확인할 수 있습니다. 컴파일이 완전히 올바른지 확인한 후 클릭할 수 있습니다.
프로그램을 컴파일하고 로그에 따라 오류를 확인할 수 있습니다. 컴파일이 완전히 올바른지 확인한 후 클릭할 수 있습니다. ![]() 로그인하고 사용자 프로그램을 프로그래머블 컨트롤러에 다운로드하면 시뮬레이션 디버깅을 수행할 수 있습니다.
로그인하고 사용자 프로그램을 프로그래머블 컨트롤러에 다운로드하면 시뮬레이션 디버깅을 수행할 수 있습니다.
시운전 전 점검 및 예방정비
사전 시작 확인
배선을 완료한 경우 모듈 작동을 시작하기 전에 다음을 확인하십시오.
- 모듈 출력 케이블은 요구 사항을 충족합니다.
- 모든 레벨의 확장 인터페이스는 안정적으로 연결됩니다.
- 응용 프로그램은 올바른 작동 방법과 매개변수 설정을 사용합니다.
예방 유지 보수
다음과 같이 예방 유지보수를 수행하십시오.
- 프로그래머블 컨트롤러는 정기적으로 청소하여 이물질이 컨트롤러 내부로 들어가지 않도록 하고 컨트롤러의 통풍과 방열 조건을 잘 유지하십시오.
- 유지보수 지침을 작성하고 컨트롤러를 정기적으로 테스트하십시오.
- 배선과 단자가 단단히 고정되어 있는지 정기적으로 점검하십시오.
추가 정보
자세한 내용은 언제든지 문의해 주십시오. 문의시 제품 모델명과 일련번호를 알려주시기 바랍니다.
관련 제품 또는 서비스 정보를 얻으려면 다음을 수행하십시오.
- INVT 지역 사무소에 문의하십시오.
- 방문하다 www.invt.com.
- 다음 QR 코드를 스캔하세요.

고객 서비스 센터, Shenzhen INVT Electric Co., Ltd.
주소: 중국 심천시 광밍구 마티안 송바이로 INVT 광밍 테크놀로지 빌딩
저작권 © INVT. 판권 소유. 설명서 정보는 사전 고지 없이 변경될 수 있습니다.

202207 (V1.0)
문서 / 리소스
 |
invt AX7 시리즈 CPU 모듈 [PDF 파일] 사용설명서 AX7 시리즈 CPU 모듈, AX7 시리즈, CPU 모듈, 모듈 |



