![]()
AX7 ![]() Manual de usuario del módulo de la CPU de la serie
Manual de usuario del módulo de la CPU de la serie
Módulo de CPU de la serie AX7
Gracias por elegir el controlador programable de la serie AX (controlador programable para abreviar).
Basado en la plataforma Invtmatic Studio, el controlador programable es totalmente compatible con los sistemas de programación IEC61131-3, el bus de campo en tiempo real EtherCAT, el bus de campo CANopen y los puertos de alta velocidad, y proporciona funciones de cámara electrónica, equipo electrónico e interpolación.
El manual describe principalmente las especificaciones, características, cableado y métodos de uso del módulo de CPU del controlador programable. Para asegurarse de utilizar el producto de forma segura y adecuada y ponerlo en pleno funcionamiento, lea atentamente el manual antes de la instalación. Para obtener detalles sobre los entornos de desarrollo de programas de usuario y los métodos de diseño de programas de usuario, consulte el Manual del usuario del hardware del controlador programable de la serie AX y el Manual del usuario del software del controlador programable de la serie AX que publicamos.
El manual está sujeto a cambios sin previo aviso. Por favor visita http://www.invt.com para descargar la última versión del manual.
Precauciones de seguridad
Advertencia
| Símbolo | Nombre | Descripción | Abreviatura |
| Peligro |
Peligro | Se pueden producir lesiones personales graves o incluso la muerte si no se siguen los requisitos relacionados. | |
| Advertencia |
Advertencia | Se pueden producir lesiones personales o daños al equipo si no se siguen los requisitos relacionados. |
Entrega e instalación
| • Solo los profesionales capacitados y calificados pueden realizar la instalación, el cableado, el mantenimiento y la inspección. • No instale el controlador programable sobre materiales inflamables. Además, evite que el controlador programable entre en contacto o se adhiera a materiales inflamables. • Instale el controlador programable en un gabinete de control con cerradura de al menos IP20, lo que evita que el personal sin conocimientos relacionados con equipos eléctricos lo toque por error, ya que el error puede provocar daños en el equipo o descargas eléctricas. Solo el personal que haya recibido capacitación relacionada con el conocimiento eléctrico y la operación del equipo puede operar el gabinete de control. • No haga funcionar el controlador programable si está dañado o incompleto. • No contacte el controlador programable con damp objetos o partes del cuerpo. De lo contrario, podría producirse una descarga eléctrica. |
Selección de cables
| • Solo los profesionales capacitados y calificados pueden realizar la instalación, el cableado, el mantenimiento y la inspección. • Comprenda completamente los tipos de interfaz, las especificaciones y los requisitos relacionados antes del cableado. De lo contrario, el cableado incorrecto provocará funcionamiento anormal. • Corte todas las fuentes de alimentación conectadas al controlador programable antes de realizar el cableado. • Antes de encender para el funcionamiento, asegúrese de que la cubierta de terminales de cada módulo esté correctamente instalada en su lugar después de completar la instalación y el cableado. Esto evita que se toque un terminal activo. De lo contrario, pueden producirse lesiones físicas, fallas en el equipo o fallas en el funcionamiento. • Instale componentes o dispositivos de protección adecuados cuando utilice fuentes de alimentación externas para el controlador programable. Esto evita que el controlador programable se dañe debido a fallas en la fuente de alimentación externa, sobrevoltajetage, sobrecorriente u otras excepciones. |
Puesta en marcha y funcionamiento
| • Antes de encender para funcionar, asegúrese de que el entorno de trabajo del controlador programable cumpla con los requisitos, el cableado sea correcto, las especificaciones de alimentación de entrada cumplan con los requisitos y se haya diseñado un circuito de protección para proteger el controlador programable para que el programable El controlador puede funcionar de manera segura incluso si ocurre una falla en un dispositivo externo. • Para módulos o terminales que requieran fuente de alimentación externa, configure dispositivos de seguridad externos, como fusibles o disyuntores, para evitar daños causados por fallas en la fuente de alimentación externa o en el dispositivo. |
Mantenimiento y reemplazo de componentes
| • Solo los profesionales capacitados y calificados pueden realizar el mantenimiento, la inspección y el reemplazo de componentes para el controlador programable. • Corte todas las fuentes de alimentación conectadas al controlador programable antes de cablear los terminales. • Durante el mantenimiento y la sustitución de componentes, tome medidas para evitar que los tornillos, cables y otros materiales conductores caigan en el interior del controlador programable. |
Desecho
| El controlador programable contiene metales pesados. Deseche un controlador programable desechado como desecho industrial. | |
| Deseche un producto de desecho por separado en un punto de recolección apropiado, pero no lo coloque en el flujo normal de desechos. |
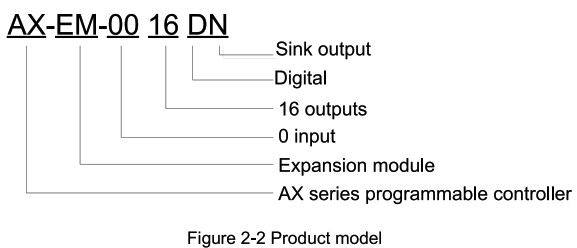
Introducción del producto
Modelo y placa de identificación
Función sobreview
Como módulo de control principal del controlador programable, el módulo de CPU AX7J-C-1608L] (módulo de CPU para abreviar) tiene las siguientes funciones:
- Realiza el control, la supervisión, el procesamiento de datos y la comunicación en red para el funcionamiento del sistema.
- Admite los lenguajes de programación IL, ST, FBD, LD, CFC y SFC que cumplen con los estándares IEC61131-3 mediante el uso de la plataforma Invtmatic Studio que INVT ha lanzado para la programación.
- Admite 16 módulos de expansión locales (como módulos de E/S, de temperatura y analógicos).
- Utiliza bus abierto Ether CAT o CAN para conectar módulos esclavos, cada uno de los cuales admite 16 módulos de expansión (como módulos de E/S, de temperatura y analógicos).
- Admite el protocolo maestro/esclavo Modbus TCP.
- Integra dos interfaces RS485, compatibles con el protocolo maestro/esclavo Modbus RTU.
- Admite E/S de alta velocidad, 16 entradas de alta velocidad y 8 salidas de alta velocidad.
- Admite control de movimiento de bus de campo EtherCAT con tiempo de sincronización de 1 ms, 2 ms, 4 ms u 8 ms.
- Admite control de movimiento de uno o varios ejes basado en pulsos, incluida la interpolación lineal de 2 a 4 ejes y la interpolación de arco de 2 ejes.
- Soporta reloj en tiempo real.
- Admite la protección de datos en caso de falla de energía.
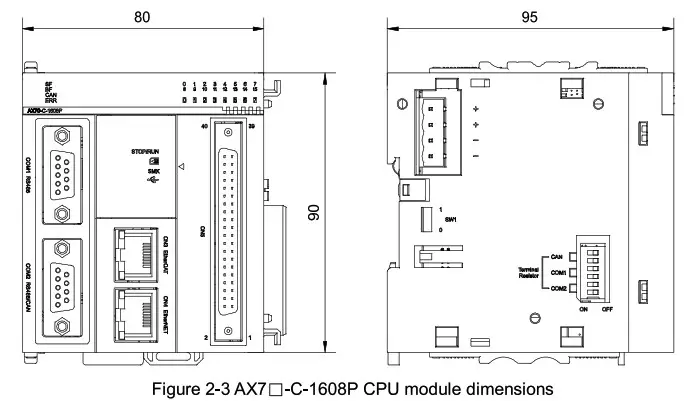
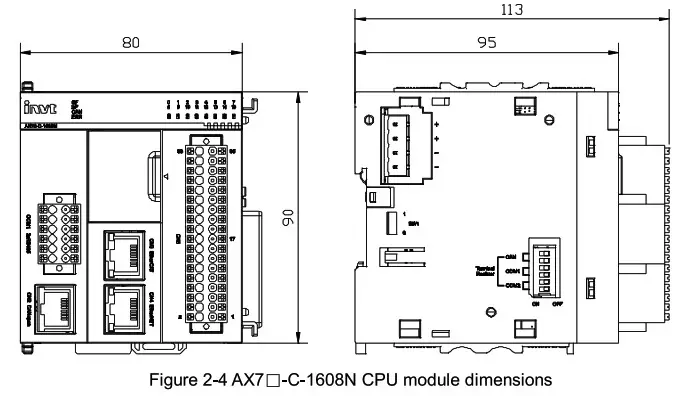
Dimensiones estructurales
Las dimensiones estructurales (unidad: mm) se muestran en la siguiente figura.
Interfaz
Descripción de la interfaz
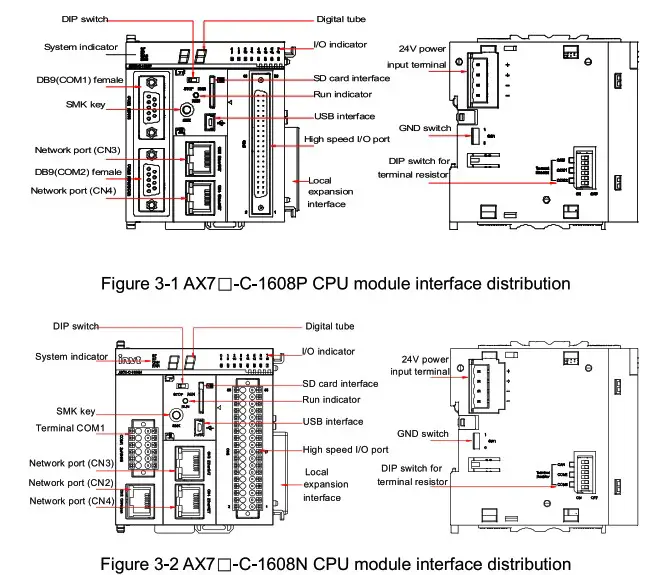
Distribución de interfaz
La Figura 3-1 y la Figura 3-2 muestran la distribución de la interfaz del módulo de la CPU. Para cada interfaz, se proporciona una descripción de pantalla de seda respectiva cerca, lo que facilita el cableado, la operación y la verificación.
| Interfaz | Función | |
| Dip switch | Interruptor DIP FUNCIONAMIENTO/DETENER. | |
| Indicador del sistema | SF: Indicador de fallo del sistema. BF: Indicador de falla del bus. CAN: Indicador de fallo del bus CAN. ERR: Indicador de falla del módulo. |
|
| clave SMK | Llave inteligente SMK. | |
| WO-C-1608P | COM1 (DB9) mujer |
Una interfaz RS485 compatible con Modbus RTU protocolo maestro/esclavo. |
| COM2 (DB9) mujer |
Una interfaz RS485 y la otra interfaz CAN La interfaz RS485 admite el protocolo maestro/esclavo Modbus RTU y la otra interfaz CAN admite el protocolo maestro/esclavo CANopen. |
|
| AX70-C-1608N | COM1 y COM2 (Terminal push-in n) | Dos interfaces RS485, compatibles con Modbus RTU protocolo maestro/esclavo. |
| CN2 (RJ45) | Interfaz CAN, compatible con el protocolo maestro/esclavo abierto CAN. | |
| CN3 (RJ45) | Interfaz CAT de éter | |
| CN4 (RJ45) | 1. Protocolo Modbus TCP 2. Funciones estándar de Ethernet 3. Descarga y depuración del programa de usuario (solo con IPv4) |
|
| Tubo digital | Muestra alarmas y responde a la pulsación de la tecla SMK. | |
| Indicador de E/S | Indica si las señales de 16 entradas y 8 salidas son válidas. | |
| Interfaz de la tarjeta SD | Se utiliza para almacenar programas de usuario y datos. | |
| Indicador de ejecución | Indica si el módulo de la CPU se está ejecutando. | |
| Interfaz USB | Se utiliza para descargar y depurar programas. | |
| E/S de alta velocidad | 16 entradas de alta velocidad y 8 salidas de alta velocidad. | |
| Interfaz de expansión local | Admite la expansión de 16 módulos de E/S, lo que no permite el intercambio en caliente. | |
| interfaz de alimentación de 24 V | 24V CC vol.tage entrada | |
| Interruptor de puesta a tierra | Interruptor de conexión entre la tierra digital interna del sistema y la tierra de la carcasa. Está desconectado por defecto (SW1 está configurado en 0). Se usa solo en escenarios especiales donde la tierra digital interna del sistema se toma como plano de referencia. Tenga cuidado antes de operarlo. De lo contrario, la estabilidad del sistema se ve afectada. | |
| Interruptor DIP de resistencia terminal | ENCENDIDO indica conexión de resistencia terminal (está APAGADO por defecto). COM1 corresponde a RS485-1, COM2 corresponde a RS485-2 y CAN corresponde a CAN. | |
clave SMK
La clave SMK se utiliza principalmente para restablecer la dirección IP del módulo de la CPU (rP) y borrar los programas de aplicación (cA). La dirección del módulo de la CPU predeterminada es 192.168.1.10. Si desea restaurar la dirección predeterminada desde una dirección IP modificada, puede restaurar la dirección predeterminada a través de la clave SMK. El método es como sigue:
- Establezca el módulo de la CPU en el estado STOP. Pulse la tecla SMK. Cuando el tubo digital muestre "rP", mantenga presionada la tecla SMK. Luego, el tubo digital muestra "rP" y se apaga alternativamente, lo que indica que se está restableciendo la dirección IP. La operación de reinicio tiene éxito cuando el tubo digital está apagado. Si suelta la tecla SMK en este momento, el tubo digital muestra "rP". Mantenga presionada la tecla SMK hasta que el tubo muestre “00” (rP—cA—rU-rP).
- Si suelta la tecla SMK durante el proceso en el que el tubo digital muestra "rP" y se apaga alternativamente, la operación de restablecimiento de la dirección IP se cancela y el tubo digital muestra "rP".
Para borrar un programa del módulo de la CPU, haga lo siguiente:
Pulse la tecla SMK. Cuando el tubo digital muestre "cA", mantenga presionada la tecla SMK. Luego, el tubo digital muestra "rP" y se apaga alternativamente, lo que indica que el programa se está borrando. Cuando el tubo digital esté apagado, reinicie el módulo de la CPU. El programa se borra con éxito.
Descripción del tubo digital
- Si los programas no tienen fallas después de la descarga, el tubo digital del módulo de la CPU muestra "00" de manera constante.
- Si un programa tiene una falla, el tubo digital muestra la información de la falla de manera intermitente.
- Por ejemploampes decir, si solo ocurre la falla 19, el tubo digital muestra "19" y se apaga alternativamente. Si la falla 19 y la falla 29 ocurren simultáneamente, el tubo digital muestra "19", se apaga, muestra "29" y se apaga alternativamente. Si ocurren más fallas simultáneamente, la forma de visualización es similar.
Definición de terminal
AX7![]() -C-1608P Definición de terminal de comunicación COM1/COM2
-C-1608P Definición de terminal de comunicación COM1/COM2
Para el módulo de CPU AX7LJ-C-1608P, COM1 es el terminal de comunicación RS485 y COM2 es el terminal de comunicación RS485/CAN, ambos utilizan un conector DB9 para la transmisión de datos. Las interfaces y los pines se describen a continuación.
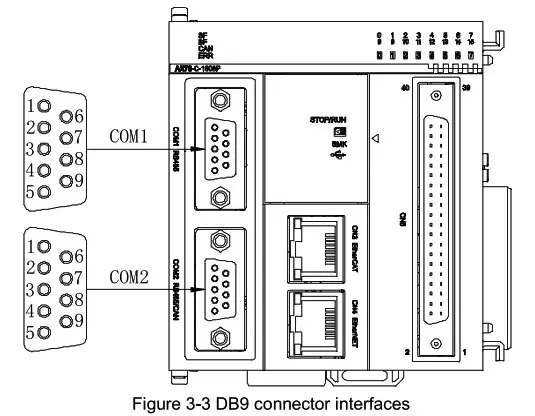
Tabla 3-1 Pines del conector COM1/COM2 DB39
| Interfaz | Distribución | Alfiler | Definición | Función |
| COM1 (RS485) |
1 | / | / | |
| 2 | / | / | ||
| 3 | / | / | ||
| 4 | RS485A | Señal diferencial RS485 + | ||
| 5 | RS485B | Señal diferencial RS485 – | ||
| 6 | / | / | ||
| 7 | / | / | ||
| 8 | / | / | ||
| 9 | GND_RS485 | Conexión a tierra RS485 | ||
| COM2 (RS485/CAN) |
1 | / | / | |
| 2 | PUEDO | Señal diferencial CAN – | ||
| 3 | / | / | ||
| 4 | RS485A | Señal diferencial RS485 + | ||
| 5 | RS485B | Señal diferencial RS485 – | ||
| 6 | GND_CAN | Tierra de alimentación CAN | ||
| 7 | PUEDE _H | señal diferencial CAN + | ||
| 8 | / | / | ||
| 9 | GND_RS485 | Conexión a tierra RS485 |
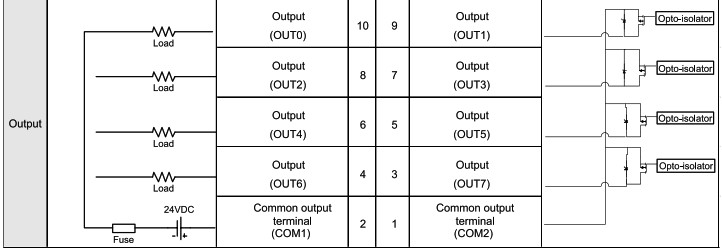
AX7![]() -C-1608P definición de terminal de E/S de alta velocidad
-C-1608P definición de terminal de E/S de alta velocidad
AX7![]() -El módulo de CPU C-1608P tiene 16 entradas de alta velocidad y 8 salidas de alta velocidad. Las interfaces y los pines se describen a continuación.
-El módulo de CPU C-1608P tiene 16 entradas de alta velocidad y 8 salidas de alta velocidad. Las interfaces y los pines se describen a continuación.
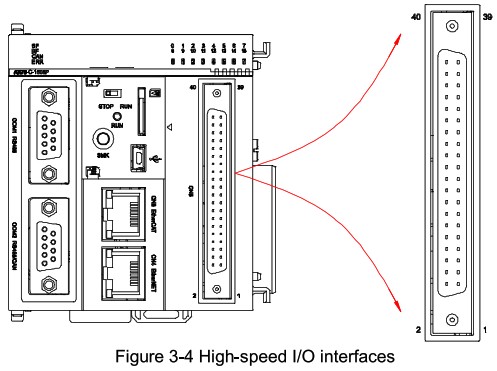
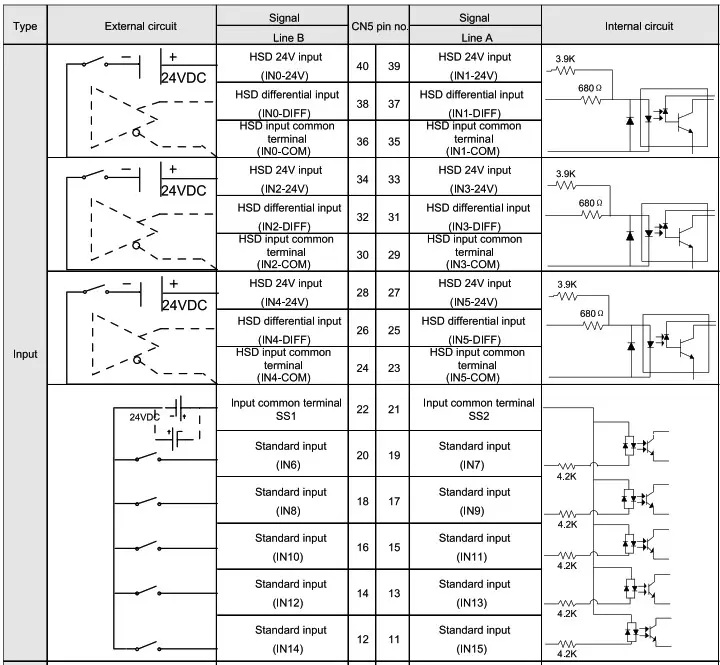
Tabla 3-2 Pines de E/S de alta velocidad
AX7![]() -C-1608N Definición de terminal de comunicación COM1/CN2
-C-1608N Definición de terminal de comunicación COM1/CN2
Para AX7![]() -Módulo de CPU C-1608N, COM1 es el terminal de comunicación RS485 de dos canales, que utiliza un conector a presión de 12 pines para la transmisión de datos. CN2 es el terminal de comunicación CAN, que utiliza el conector RJ45 para la transmisión de datos. Las interfaces y los pines se describen a continuación.
-Módulo de CPU C-1608N, COM1 es el terminal de comunicación RS485 de dos canales, que utiliza un conector a presión de 12 pines para la transmisión de datos. CN2 es el terminal de comunicación CAN, que utiliza el conector RJ45 para la transmisión de datos. Las interfaces y los pines se describen a continuación.

Tabla 3-3 Pines del conector COM1/ CN2
| Funciones de terminal push-in de COM1 | ||||
| Definición | Función | Alfiler | ||
| COM1RS485 | A | Señal diferencial RS485 + |
12 | |
| B | Señal diferencial RS485 – | 10 | ||
| Tierra | Potencia de chip RS485 _1 suelo |
8 | ||
| PE | Escudo de tierra | 6 | ||
| COM2RS485 | A | Señal diferencial RS485 + |
11 | |
| B | Señal diferencial RS485 – | 9 | ||
| Tierra | potencia del chip RS485_2 suelo |
7 | ||
| PE | Escudo de tierra | 5 | ||
| Nota: Los pines 1-4 no se utilizan. | ||||
| Funciones de pines de CN2 | ||||
| Definición | Función | Alfiler | ||
| Puedo abrir | Tierra | Tierra de alimentación CAN | 1 | |
| PUEDO | Señal diferencial CAN – | 7 | ||
| CAN_H | señal diferencial CAN + | 8 | ||
| Nota: Los pines 2-6 no se utilizan. | ||||
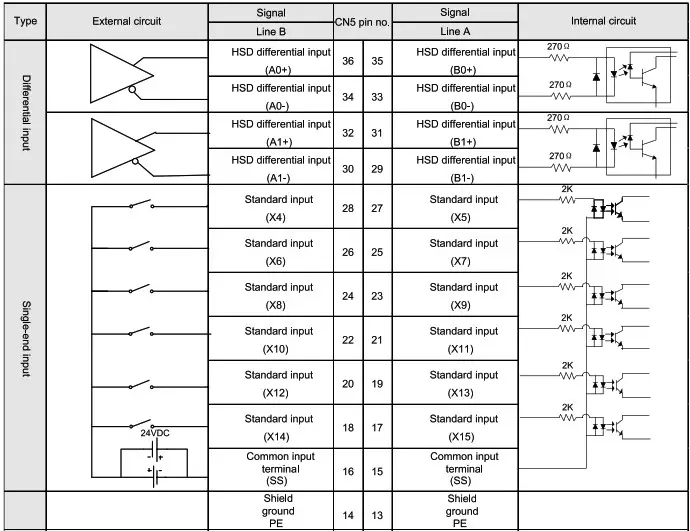
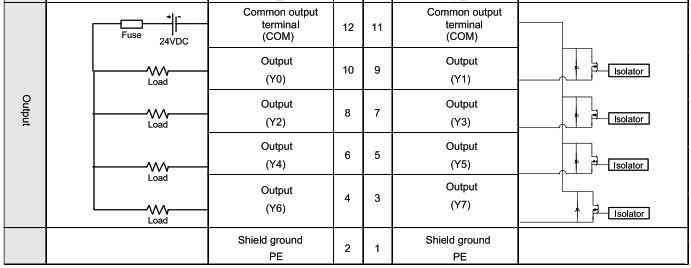
AX7![]() -C-1608N definición de terminal de E/S de alta velocidad
-C-1608N definición de terminal de E/S de alta velocidad
AX7![]() El módulo de CPU 1-C-1608N tiene 16 entradas de alta velocidad y 8 salidas de alta velocidad. La siguiente figura muestra la distribución de terminales y la siguiente tabla enumera los pines.
El módulo de CPU 1-C-1608N tiene 16 entradas de alta velocidad y 8 salidas de alta velocidad. La siguiente figura muestra la distribución de terminales y la siguiente tabla enumera los pines.
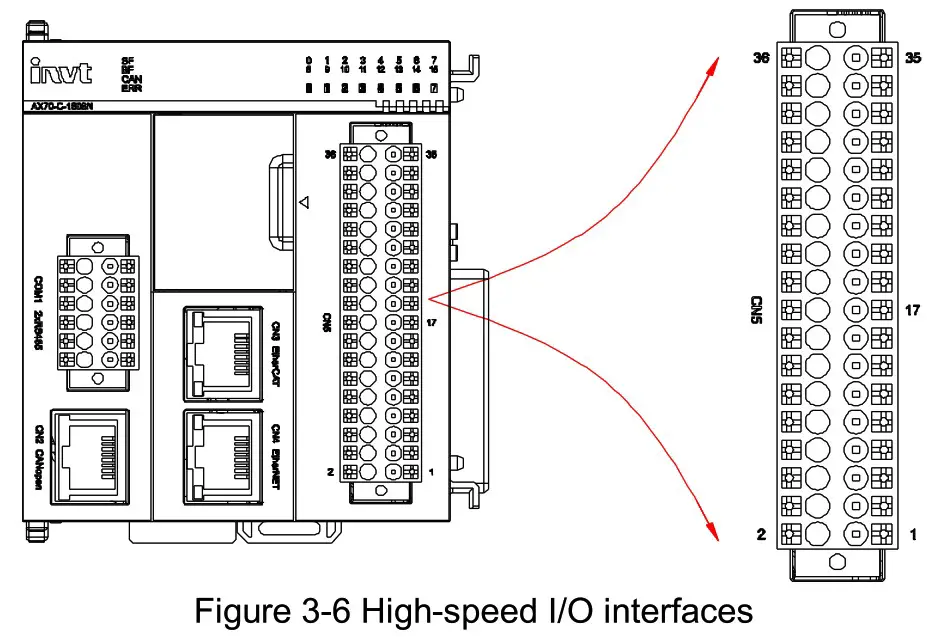
Tabla 3-4 Pines de E/S de alta velocidad
Nota:
- Los 16 canales de entrada de AX7
 -El módulo de CPU C-1608P permite una entrada de alta velocidad, pero los primeros 6 canales admiten una entrada diferencial o de un solo extremo de 24 V, y los últimos 10 canales admiten una entrada de un solo extremo de 24 V.
-El módulo de CPU C-1608P permite una entrada de alta velocidad, pero los primeros 6 canales admiten una entrada diferencial o de un solo extremo de 24 V, y los últimos 10 canales admiten una entrada de un solo extremo de 24 V. - Los 16 canales de entrada de AX7-El módulo de CPU C-1608N permite entrada de alta velocidad, pero los primeros 4 canales admiten entrada diferencial y los últimos 12 canales admiten entrada de un solo extremo de 24 V.
- Cada punto de E/S está aislado del circuito interno.
- La longitud total del cable de conexión del puerto de E/S de alta velocidad no puede superar los 3 metros.
- No doble los cables cuando los sujete.
- Durante el tendido de cables, separe los cables de conexión de los cables de alta potencia que causan fuertes interferencias, pero no ate los cables de conexión con estos últimos. Además, evite el enrutamiento paralelo de larga distancia.
Instalación del módulo
Con un diseño modular, el controlador programable es fácil de instalar y mantener. En cuanto al módulo de la CPU, los principales objetos de conexión son la fuente de alimentación y los módulos de expansión.
Los módulos se conectan mediante las interfaces de conexión proporcionadas por el módulo y los ajustes a presión.
El procedimiento de montaje es el siguiente:
| Paso 1 Deslice el ajuste a presión en el módulo de la CPU en la dirección que se muestra en la siguiente figura (usando el módulo de alimentación). conexión para example). |
Paso 2 Alinee el módulo de la CPU con el conector del módulo de alimentación para el enclavamiento. |
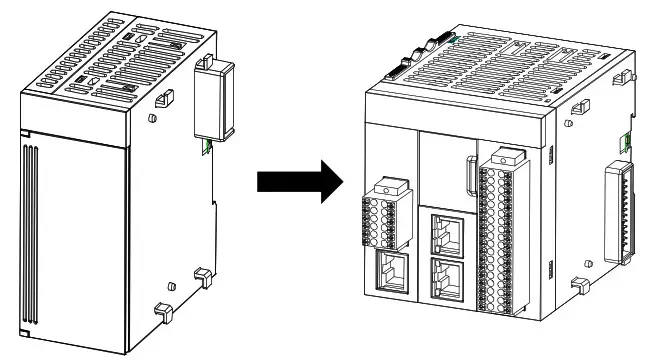 |
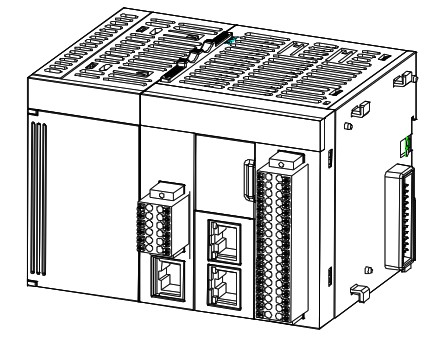 |
| Paso 3 Deslice el ajuste a presión en el módulo de la CPU en la dirección que se muestra en la siguiente figura para conectar y bloquear los dos módulos. | Paso 4 Al igual que para la instalación en riel DIN estándar, enganche el módulo respectivo en el riel de instalación estándar hasta que encaje en su lugar con un clic. |
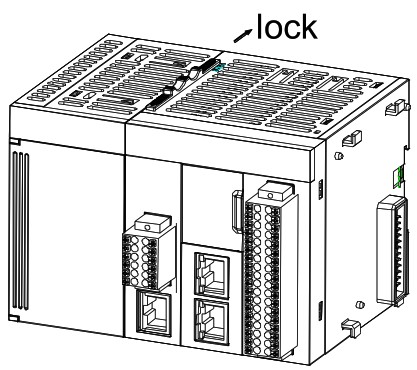 |
 |
Conexión de cables y especificaciones
Conexión de bus CAT de éter
Especificaciones del bus Ether CAT
| Artículo | Descripción |
| Protocolo de comunicación | Gato de éter |
| servicio compatible | COE (DOP/SDO) |
| mín. intervalo de sincronización | 1ms/4 ejes (Valor típico) |
| método de sincronización | CC para sincronización/CC sin usar |
| Capa fisica | 100BASE-TX |
| Modo dúplex | Dúplex completo |
| Estructura de topología | Conexión en serie |
| Medio de transmision | Cable de red (consulte la sección “Selección de cable”) |
| Distancia de transmisión | Menos de 100 m entre dos nodos |
| Número de nodos esclavos | Hasta 125 |
| Longitud de trama Ether CAT | 44 bytes-1498 bytes |
| Procesar datos | Hasta 1486 bytes contenidos en un solo marco |
Selección de cables
El módulo de la CPU puede implementar la comunicación del bus Ether CAT a través del puerto CN3. Se recomiendan cables estándar INVT. Si fabrica los cables de comunicación usted mismo, asegúrese de que cumplan con los siguientes requisitos:
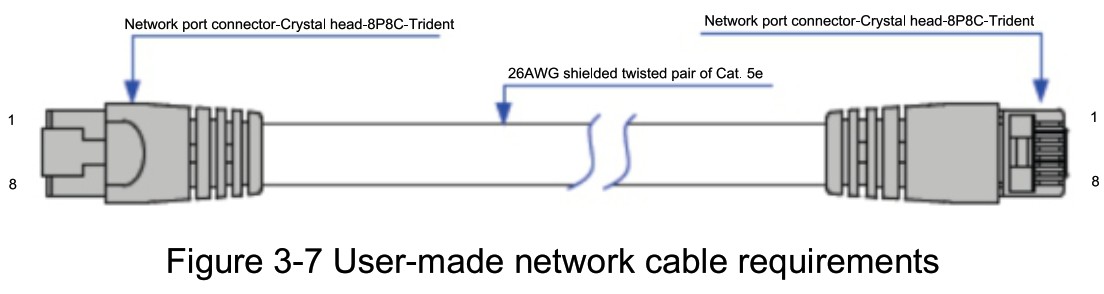
Nota:
- Los cables de comunicación que utilice deben pasar la prueba de conductividad al 100%, sin cortocircuito, circuito abierto, dislocación o mal contacto.
- Para garantizar la calidad de la comunicación, la longitud del cable de comunicación EtherCAT no puede superar los 100 metros.
- Se recomienda fabricar los cables de comunicación utilizando cables de par trenzado blindado de categoría 5e, que cumplen con EIA/TIA568A, EN50173, ISO/IEC11801, EIA/TIA boletín TSB y EIA/TIA SB40-A&TSB36.
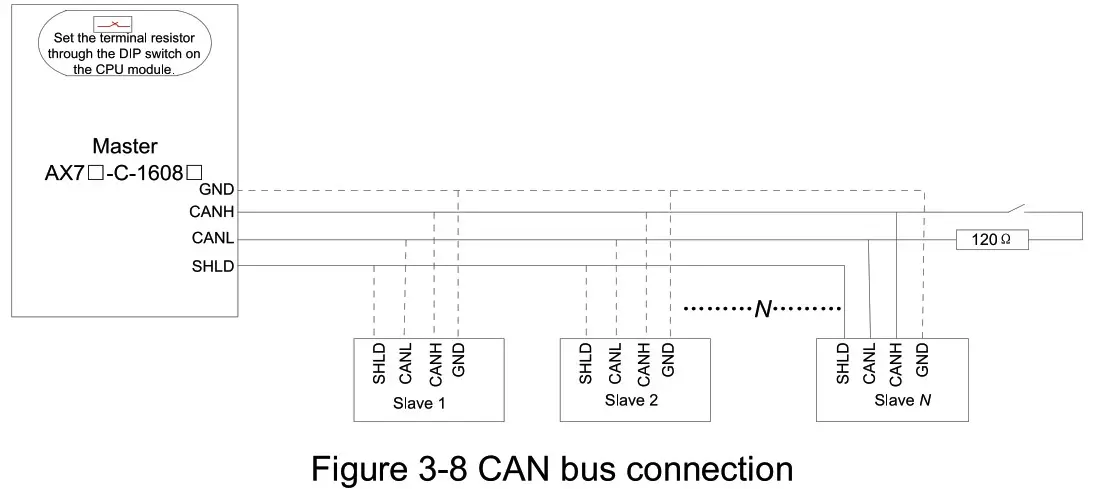
Conexión de cable CAN abierto
Redes
La estructura de la topología de conexión del bus CAN se muestra en la siguiente figura. Se recomienda utilizar el par trenzado blindado para la conexión del bus CAN. Cada extremo del bus CAN se conecta a una resistencia terminal de 1200 para evitar el reflejo de la señal. En la mayoría de los casos, la capa de blindaje usa conexión a tierra de un solo punto.
Selección de cables
- Para AX7-Módulo CPU C-1608P, se utiliza el mismo terminal tanto para la comunicación CANopen como para la comunicación RS485, utilizando un conector DB9 para la transmisión de datos. Los pines del conector DB9 se han descrito anteriormente.
- Para AX7Módulo de CPU 1-C-1608N, el terminal RJ45 se utiliza para la comunicación CANopen para la transmisión de datos. Los pines del conector RJ45 se han descrito anteriormente.
Se recomiendan cables estándar INVT. Si fabrica los cables de comunicación usted mismo, hágalos de acuerdo con la descripción del pin y asegúrese de que el proceso de fabricación y los parámetros técnicos cumplan con los requisitos de comunicación.
Nota:
- Para mejorar la capacidad antiinterferencias del cable, se recomienda utilizar técnicas de blindaje de lámina de aluminio y trenzado de aluminio y magnesio al fabricar los cables.
- Utilice la técnica de bobinado de par trenzado para cables diferenciales.
Conexión de comunicación serie RS485
El módulo de la CPU admite 2 canales de comunicación RS485.
- Para AX7-Módulo CPU C-1608P, los puertos COM1 y COM2 utilizan el conector DB9 para la transmisión de datos. Los pines del conector DB9 se han descrito anteriormente.
- Para AX7-Módulo de CPU C-1608N, el puerto utiliza el conector de terminal a presión de 12 pines para la transmisión de datos. Los pines en el conector terminal se han descrito anteriormente.
Se recomiendan cables estándar INVT. Si fabrica los cables de comunicación usted mismo, hágalos de acuerdo con la descripción del pin y asegúrese de que el proceso de fabricación y los parámetros técnicos cumplan con los requisitos de comunicación.
Nota:
- Para mejorar la capacidad antiinterferencias del cable, se recomienda utilizar técnicas de blindaje de lámina de aluminio y trenzado de aluminio y magnesio al fabricar los cables.
- Utilice la técnica de bobinado de par trenzado para cables diferenciales.
Conexión Ethernet
Redes
El puerto Ethernet del módulo de la CPU es CN4, que puede conectarse a otro dispositivo, como una computadora o un dispositivo HMI, mediante un cable de red en el modo punto a punto.
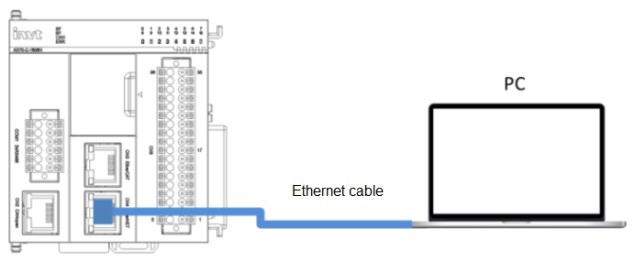
Figura 3-9 Conexión Ethernet
También puede conectar el puerto Ethernet a un concentrador o conmutador mediante un cable de red, implementando una conexión multipunto.

Figura 3-10Redes Ethernet
Selección de cables
Para mejorar la confiabilidad de la comunicación, use cables blindados de par trenzado de categoría 5 o superior como cables Ethernet. Se recomiendan cables estándar INVT.
Instrucciones de uso
Parámetros técnicos
Especificaciones generales del módulo de la CPU
| Artículo | Descripción | |||||
| Vol de entradatage | 24 V CC | |||||
| Consumo de energía | < 15 W | |||||
| Fallo de alimentación tiempo de protección |
300 ms (sin protección dentro de los 20 segundos posteriores al encendido) | |||||
| Batería de respaldo del reloj en tiempo real |
Apoyado | |||||
| Alimentación del bus de fondo suministrar |
5 V/2.5 A | |||||
| Método de programación | Lenguajes de programación IEC 61131-3 (LD, FBD, IL, ST, SFC, y CFC) |
|||||
| Ejecución del programa método |
locales en línea | |||||
| Almacenamiento de programas de usuario espacio |
10 MB | |||||
| espacio de memoria flash por falla de energía protección |
512 KB | |||||
| tarjeta SD presupuesto |
MicroSD 32G | |||||
| elementos blandos y características |
||||||
| Elemento | Nombre | Contar | Características de almacenamiento | |||
| Por defecto | Wrlable | Descripción | ||||
| I | Relé de entrada | 64Kpalabra | no guardar | No | X: 1 bit B. 8 bits W: 16 bits D: 32 bits L: 64 bits | |
| Q | Relé de salida | 64Kpalabra | no guardar | No | ||
| M | Salida auxiliar | 256Kpalabra | Ahorrar | Sí | ||
| Retención del programa método sobre el poder falla |
Retención por el flash interno | |||||
| Modo de interrupción | La señal DI de alta velocidad del módulo de la CPU se puede configurar como entrada de interrupción, lo que permite hasta ocho puntos de entrada, y se pueden configurar los modos de interrupción de flanco ascendente y descendente. | |||||
Especificaciones de E/S de alta velocidad
Especificaciones de entrada de alta velocidad
| Artículo | specifcations | |
| Nombre de la señal | Entrada diferencial de alta velocidad | Entrada de un solo extremo de alta velocidad |
| Entrada nominal volumentage |
2.5V | 24 V CC (-15 % — +20 %, pulsante dentro de 5%) |
| Entrada nominal actual |
6.8 mA | 5.7 mA (valor típico) (a 24 V CC) |
| en corriente | / | Menos de 2 mA |
| APAGADO corriente | / | Menos de 1 mA |
| Resistencia de entrada | 5400 | 2.2k0 |
| máx. contando velocidad |
800 K pulsos/s (frecuencia cuádruple 2PH), 200 kHz (canal único de entrada) | |
| Servicio de entrada 2PH relación |
40%. 60% | |
| Terminal común | / | Se utiliza un terminal común. |
Especificaciones de salida de alta velocidad
| Artículo | Presupuesto |
| Nombre de la señal | Salida (YO—Y7) |
| Polaridad de salida | AX7 AX7 |
| Volumen del circuito de controltage | CC 5 V-24 V |
| Corriente de carga nominal | 100mA/punto, 1A/COM |
| máx. volumentage caída en ON | 0.2 V (valor típico) |
| Corriente de fuga en OFF | Menos de 0.1 mA |
| Frecuencia de salida | 200kHz (La salida de 200kHz requiere que la carga equivalente conectada externamente sea superior a 12mA). |
| Terminal común | Cada ocho puntos utilizan un terminal común. |
Nota:
- Los puertos de E/S de alta velocidad tienen restricciones en la frecuencia permitida. Si la frecuencia de entrada o salida excede el valor permitido, el control y la identificación pueden ser anormales. Organice los puertos de E/S correctamente.
- La interfaz de entrada diferencial de alta velocidad no acepta un nivel de entrada de presión diferencial superior a 7V. De lo contrario, el circuito de entrada puede dañarse.
Introducción y descarga del software de programación
Introducción al software de programación
INVTMATIC Studio es un software de programación de controladores programables que desarrolla INVT. Proporciona un entorno de desarrollo de programación abierto y completamente integrado con tecnología avanzada y potentes funciones para el desarrollo de proyectos que se basa en lenguajes de programación que cumplen con IEC 61131-3. Es ampliamente utilizado en energía, transporte, municipal, metalurgia, química, farmacéutica, alimentos, textil, embalaje, impresión, caucho y plásticos, máquinas herramienta e industrias similares.
Entorno de ejecución y descarga
Puede instalar Invtmatic Studio en una computadora de escritorio o portátil, cuyo sistema operativo sea al menos Windows 7, el espacio de memoria sea de al menos 2 GB, el espacio de hardware libre sea de al menos 10 GB y la frecuencia principal de la CPU sea superior a 2 GHz. Luego, puede conectar su computadora al módulo de CPU del controlador programable a través de un cable de red y editar los programas de usuario a través del software Invtmatic Studio para que pueda descargar y depurar programas de usuario.
Instancia de programación
A continuación se describe cómo realizar la programación mediante el uso de un examparchivo (AX72-C-1608N).
En primer lugar, conecte todos los módulos de hardware del controlador programable, incluida la conexión de la fuente de alimentación al módulo de la CPU, la conexión del módulo de la CPU a la computadora donde se instaló Invtmatic Studio y al módulo de expansión requerido, y la conexión del bus EtherCAT a la impulsión del motor. Inicie Invtmatic Studio para crear un proyecto y realizar la configuración de la programación.
El procedimiento es el siguiente:
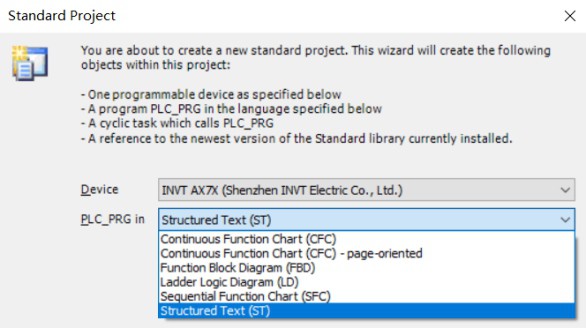
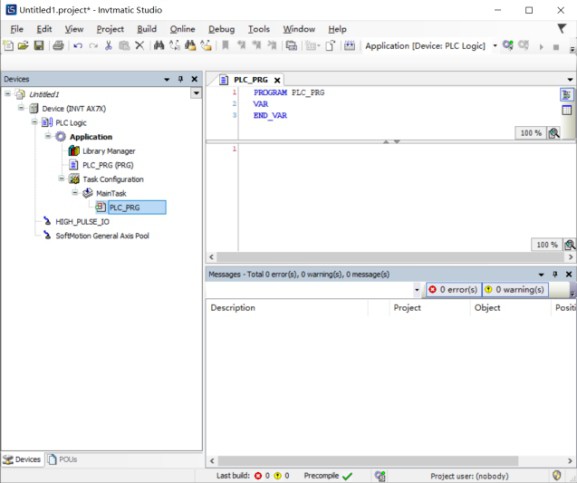
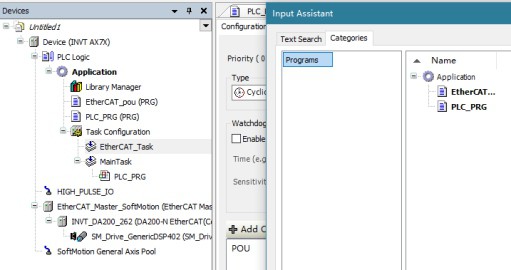
Paso 1 Elija File > Nuevo proyecto, seleccione el tipo de proyecto estándar y configure la ubicación y el nombre para guardar el proyecto. Haga clic en Aceptar. Luego seleccione el dispositivo INVT AX7X y el lenguaje de programación de Texto Estructurado (ST) en la ventana de configuración del proyecto estándar que aparece. Aparece la interfaz de configuración y programación de CODESYS.
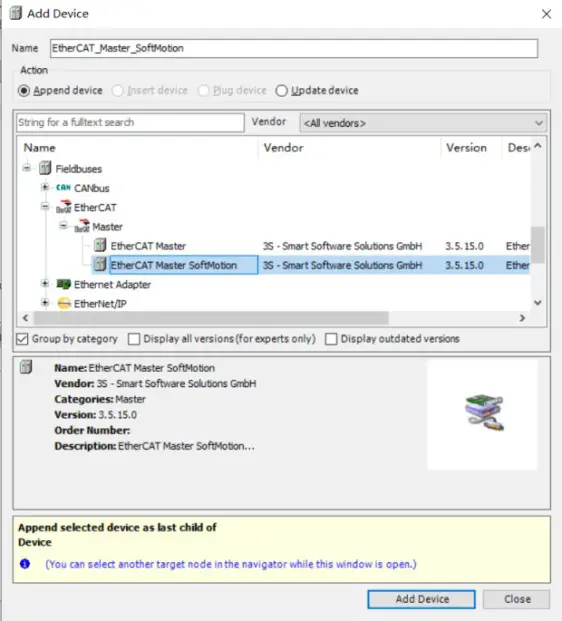
Paso 2 Haga clic con el botón derecho en el árbol de navegación del dispositivo. Luego elija Agregar dispositivo. Elija Ether CAT Master Soft Motion.
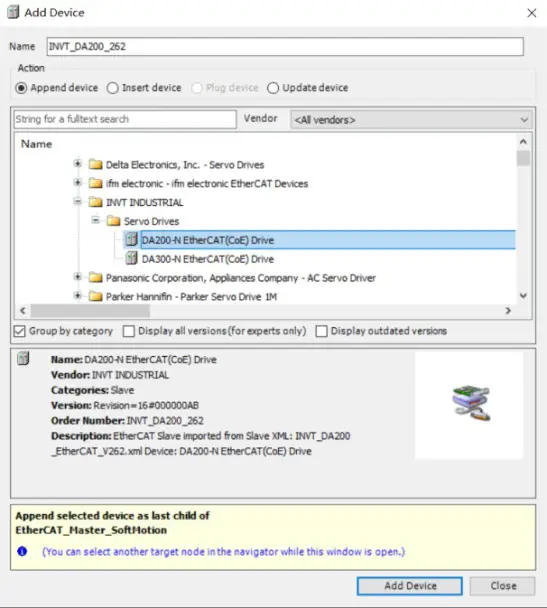
Paso 3 Haga clic derecho EtherCAT_Master_SoftMotion en el árbol de navegación izquierdo. Elija Agregar dispositivo. Elija la unidad DA200-N Ether CAT(CoE) en la ventana que aparece.
Paso 4 Elija Add SoftMotion CiA402 Axis en el menú contextual que aparece.
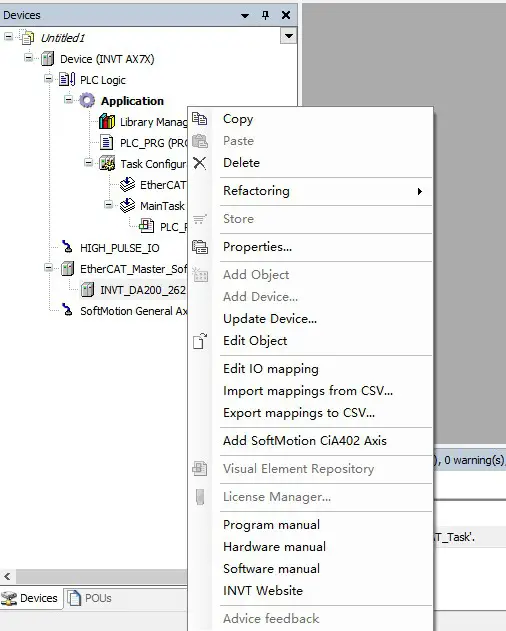
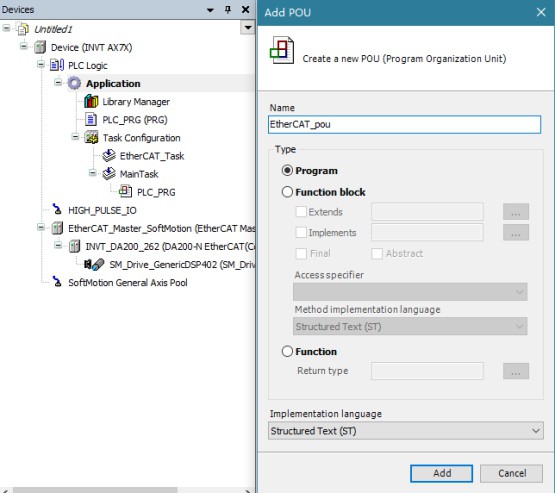
Paso 5 Haga clic con el botón derecho en Aplicación en el árbol de navegación izquierdo y elija agregar una POU EtherCAT. Haga doble clic en EtherCAT_Task generado automáticamente para invocar. Elija el EtherCAT_pou creado. Escriba el programa de aplicación basado en el proceso de control de la aplicación.
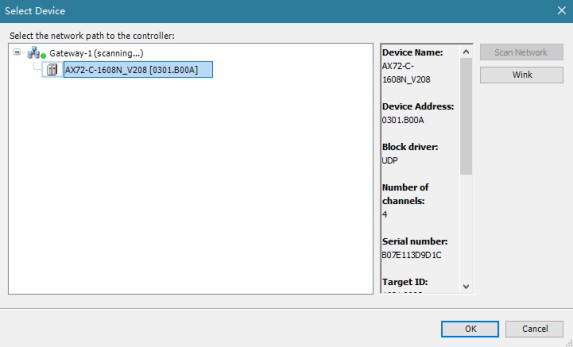
Paso 6 Haga doble clic en el árbol de navegación Dispositivo, haga clic en Escanear red, elija AX72-C-1608N que se muestra en la siguiente figura y haga clic en Wink. Luego haga clic en Aceptar cuando
el indicador del sistema de la CPU parpadea.
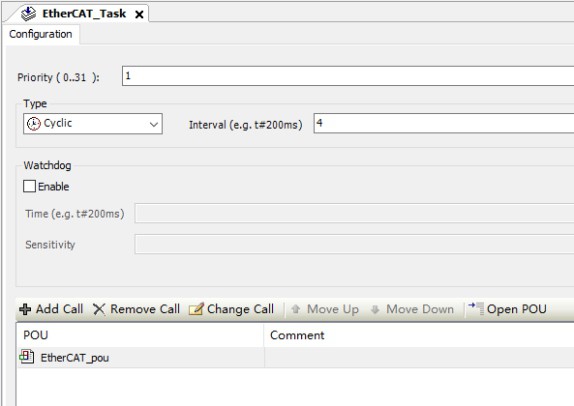
Paso 7 Haga doble clic en EtherCAT_Task en Configuración de tareas en el panel izquierdo. Establezca las prioridades de las tareas y los intervalos de ejecución en función de los requisitos en tiempo real de las tareas.
En Invtmatic Studio, puede hacer clic en ![]() para compilar programas, y puede comprobar si hay errores según los registros. Después de confirmar que la compilación es completamente correcta, puede hacer clic en
para compilar programas, y puede comprobar si hay errores según los registros. Después de confirmar que la compilación es completamente correcta, puede hacer clic en ![]() para iniciar sesión y descargar programas de usuario al controlador programable y puede realizar la depuración de simulación.
para iniciar sesión y descargar programas de usuario al controlador programable y puede realizar la depuración de simulación.
Comprobación previa a la puesta en marcha y mantenimiento preventivo
Comprobación previa a la puesta en marcha
Si ha completado el cableado, asegúrese de lo siguiente antes de que el módulo comience a funcionar:
- Los cables de salida del módulo cumplen los requisitos.
- Las interfaces de expansión en cualquier nivel están conectadas de manera confiable.
- Los programas de aplicación utilizan los métodos de operación y la configuración de parámetros correctos.
Mantenimiento preventivo
Realice el mantenimiento preventivo de la siguiente manera:
- Limpie el controlador programable regularmente, evite que caigan materias extrañas en el controlador y asegure buenas condiciones de ventilación y disipación de calor para el controlador.
- Formule instrucciones de mantenimiento y pruebe periódicamente el controlador.
- Verifique periódicamente el cableado y los terminales para asegurarse de que estén bien sujetos.
Más información
Por favor no dude en contactar con nosotros para más información. Proporcione el modelo del producto y el número de serie cuando realice una consulta.
Para obtener información relacionada con productos o servicios, puede:
- Comuníquese con la oficina local de INVT.
- Visita www.invt.com.
- Escanea el siguiente código QR.

Centro de atención al cliente, Shenzhen INVT Electric Co., Ltd.
Dirección: Edificio de tecnología INVT Guangming, Songbai Road, Matian, distrito de Guangming, Shenzhen, China
Derechos de autor © INVT. Reservados todos los derechos. La información del manual puede estar sujeta a cambios sin previo aviso.

202207 (V1.0)
Documentos / Recursos
 |
Módulo de CPU de la serie invt AX7 [pdf] Manual de instrucciones Módulo de CPU serie AX7, Serie AX7, Módulo de CPU, Módulo |



