![]()
AX7 ![]() Sê-ri Hướng dẫn sử dụng mô-đun CPU
Sê-ri Hướng dẫn sử dụng mô-đun CPU
Mô-đun CPU Sê-ri AX7
Cảm ơn bạn đã lựa chọn bộ điều khiển khả trình sê-ri AX (viết tắt là bộ điều khiển khả trình).
Dựa trên nền tảng Invtmatic Studio, bộ điều khiển khả trình hỗ trợ đầy đủ các hệ thống lập trình IEC61131-3, bus trường thời gian thực EtherCAT, bus trường CANopen và các cổng tốc độ cao, đồng thời cung cấp cam điện tử, thiết bị điện tử và các chức năng nội suy.
Sách hướng dẫn này chủ yếu mô tả các thông số kỹ thuật, tính năng, đấu dây và phương pháp sử dụng mô-đun CPU của bộ điều khiển khả trình. Để đảm bảo rằng bạn sử dụng sản phẩm một cách an toàn, đúng cách và phát huy hết tác dụng của sản phẩm, hãy đọc kỹ hướng dẫn trước khi lắp đặt. Để biết chi tiết về môi trường phát triển chương trình người dùng và phương pháp thiết kế chương trình người dùng, hãy xem Sổ tay người dùng phần cứng bộ điều khiển khả trình sê-ri AX và Sổ tay người dùng phần mềm bộ điều khiển khả trình sê-ri AX mà chúng tôi phát hành.
Hướng dẫn có thể thay đổi mà không cần thông báo trước. vui lòng truy cập http://www.invt.com để tải xuống phiên bản thủ công mới nhất.
Biện pháp phòng ngừa an toàn
Cảnh báo
| Biểu tượng | Tên | Sự miêu tả | Viết tắt |
| Sự nguy hiểm |
Sự nguy hiểm | Thương tích cá nhân nghiêm trọng hoặc thậm chí tử vong có thể xảy ra nếu không tuân thủ các yêu cầu liên quan. | |
| Cảnh báo |
Cảnh báo | Có thể xảy ra thương tích cá nhân hoặc hư hỏng thiết bị nếu không tuân thủ các yêu cầu liên quan. |
Giao hàng và lắp đặt
| • Chỉ những chuyên gia được đào tạo và có trình độ mới được phép thực hiện lắp đặt, đi dây, bảo trì và kiểm tra. • Không cài đặt bộ điều khiển khả trình trên chất dễ cháy. Ngoài ra, ngăn không cho bộ điều khiển khả trình tiếp xúc hoặc dính vào chất dễ cháy. • Lắp đặt bộ điều khiển khả trình trong tủ điều khiển có thể khóa được ít nhất là IP20, điều này ngăn cản nhân viên không có kiến thức liên quan đến thiết bị điện vô tình chạm vào, vì sơ suất có thể dẫn đến hư hỏng thiết bị hoặc điện giật. Chỉ những nhân viên đã được đào tạo về kiến thức điện và vận hành thiết bị liên quan mới có thể vận hành tủ điều khiển. • Không chạy bộ điều khiển khả trình nếu nó bị hỏng hoặc không đầy đủ. • Không tiếp xúc bộ điều khiển khả trình với damp đồ vật hoặc bộ phận cơ thể. Nếu không, có thể bị điện giật. |
Lựa chọn cáp
| • Chỉ những chuyên gia được đào tạo và có trình độ mới được phép thực hiện lắp đặt, đi dây, bảo trì và kiểm tra. • Tìm hiểu đầy đủ về các loại giao diện, thông số kỹ thuật và các yêu cầu liên quan trước khi đi dây. Nếu không, hệ thống dây điện không chính xác sẽ gây ra chạy bất thường. • Cắt tất cả các nguồn điện kết nối với bộ điều khiển khả trình trước khi thực hiện nối dây. • Trước khi bật nguồn để chạy, hãy đảm bảo rằng mỗi nắp đầu cuối mô-đun được lắp đúng vị trí sau khi hoàn tất lắp đặt và đi dây. Điều này ngăn thiết bị đầu cuối trực tiếp bị chạm vào. Nếu không, có thể dẫn đến chấn thương cơ thể, lỗi thiết bị hoặc không hoạt động. • Lắp đặt các thành phần hoặc thiết bị bảo vệ phù hợp khi sử dụng nguồn điện bên ngoài cho bộ điều khiển khả trình. Điều này ngăn không cho bộ điều khiển khả trình bị hư hỏng do lỗi nguồn điện bên ngoài, quá điện áp.tage, quá dòng hoặc các trường hợp ngoại lệ khác. |
Vận hành và chạy
| • Trước khi bật nguồn để chạy, hãy đảm bảo rằng môi trường làm việc của bộ điều khiển khả trình đáp ứng các yêu cầu, đấu dây đúng, thông số kỹ thuật nguồn đầu vào đáp ứng các yêu cầu và mạch bảo vệ đã được thiết kế để bảo vệ bộ điều khiển khả trình để bộ điều khiển khả trình có thể hoạt động. bộ điều khiển có thể chạy an toàn ngay cả khi xảy ra lỗi thiết bị bên ngoài. • Đối với các mô-đun hoặc thiết bị đầu cuối yêu cầu nguồn điện bên ngoài, hãy cấu hình các thiết bị an toàn bên ngoài như cầu chì hoặc bộ ngắt mạch để tránh hư hỏng do nguồn điện bên ngoài hoặc lỗi thiết bị. |
Bảo trì, thay thế linh kiện
| • Chỉ những chuyên gia được đào tạo và có trình độ mới được phép thực hiện bảo trì, kiểm tra và thay thế linh kiện cho máy Bộ điều khiển lập trình. • Cắt tất cả các nguồn điện được kết nối với bộ điều khiển khả trình trước khi nối dây đầu cuối. • Trong quá trình bảo trì và thay thế linh kiện, hãy thực hiện các biện pháp để ngăn vít, dây cáp và các chất dẫn điện khác rơi vào bên trong bộ điều khiển khả trình. |
Xử lý
| Bộ điều khiển khả trình có chứa kim loại nặng. Vứt bỏ bộ điều khiển khả trình phế liệu như rác thải công nghiệp. | |
| Vứt bỏ riêng một sản phẩm phế liệu tại một điểm thu gom thích hợp nhưng không đặt nó vào dòng chất thải thông thường. |
Giới thiệu sản phẩm
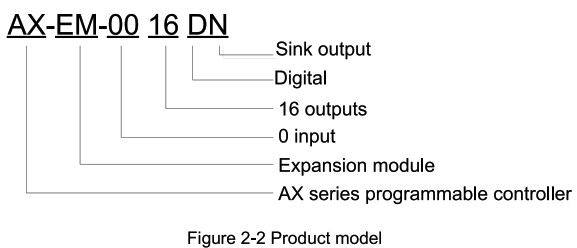
Mô hình và bảng tên
Chức năng trênview
Là mô đun điều khiển chính của bộ điều khiển khả trình, mô đun CPU AX7J-C-1608L] (viết tắt là mô đun CPU) có các chức năng sau:
- Thực hiện kiểm soát, giám sát, xử lý dữ liệu và giao tiếp mạng cho hệ thống đang chạy.
- Hỗ trợ các ngôn ngữ lập trình IL, ST, FBD, LD, CFC và SFC tuân thủ các tiêu chuẩn IEC61131-3 bằng cách sử dụng nền tảng Invtmatic Studio mà INVT đã đưa ra để lập trình.
- Hỗ trợ 16 mô-đun mở rộng cục bộ (chẳng hạn như mô-đun I/O, nhiệt độ và tương tự).
- Sử dụng bus mở Ether CAT hoặc CAN để kết nối các mô-đun phụ, mỗi mô-đun hỗ trợ 16 mô-đun mở rộng (chẳng hạn như mô-đun I/O, nhiệt độ và mô-đun tương tự).
- Hỗ trợ giao thức chủ/tớ Modbus TCP.
- Tích hợp hai giao diện RS485, hỗ trợ giao thức chủ/phụ Modbus RTU.
- Hỗ trợ I/O tốc độ cao, 16 đầu vào tốc độ cao và 8 đầu ra tốc độ cao.
- Hỗ trợ điều khiển chuyển động bus trường EtherCAT với thời gian đồng bộ hóa là 1ms, 2ms, 4ms hoặc 8ms.
- Hỗ trợ điều khiển chuyển động một hoặc nhiều trục dựa trên xung, bao gồm nội suy tuyến tính 2-4 trục và nội suy cung 2 trục.
- Hỗ trợ đồng hồ thời gian thực.
- Hỗ trợ bảo vệ dữ liệu khi mất điện.
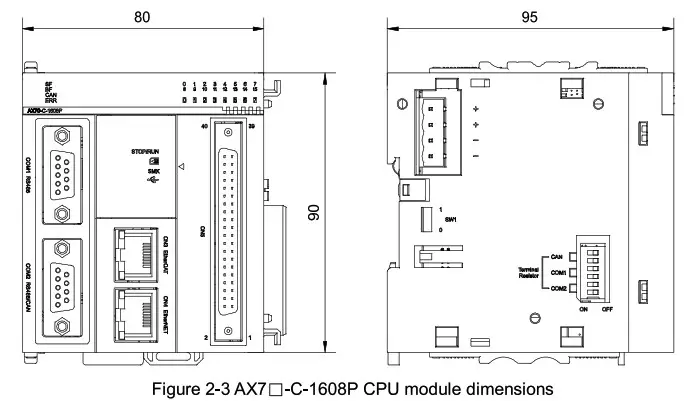
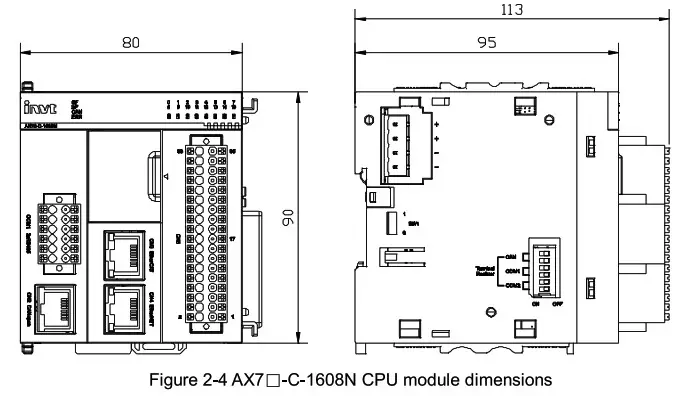
kích thước kết cấu
Kích thước cấu trúc (đơn vị: mm) được thể hiện trong hình dưới đây.
Giao diện
Mô tả giao diện
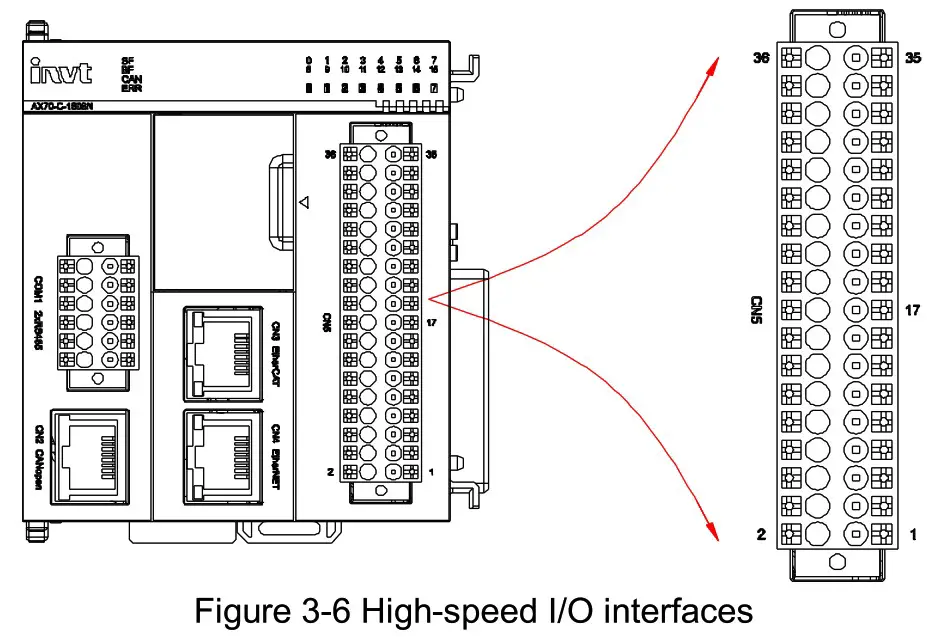
Phân phối giao diện
Hình 3-1 và Hình 3-2 hiển thị phân bố giao diện mô-đun CPU. Đối với mỗi giao diện, một mô tả màn hình lụa tương ứng được cung cấp gần đó, tạo điều kiện thuận lợi cho việc nối dây, vận hành và kiểm tra.
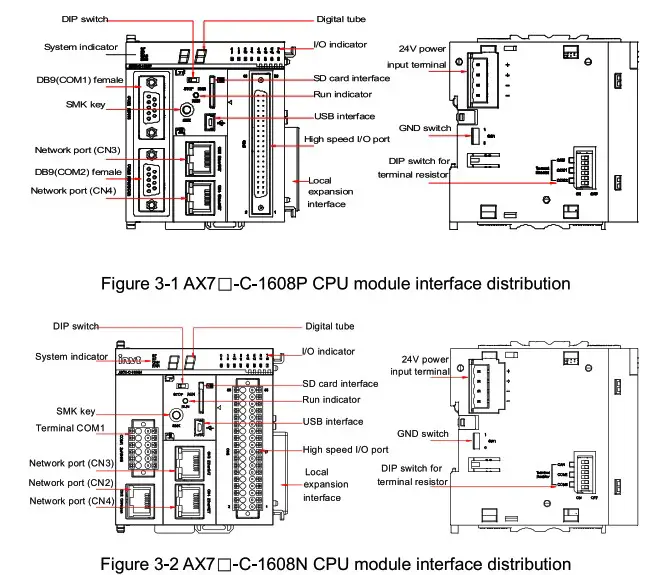
| Giao diện | Chức năng | |
| Dip Switch | Công tắc RUN/STOP DIP. | |
| Chỉ báo hệ thống | SF: Chỉ báo lỗi hệ thống. BF: Đèn báo lỗi bus. CAN: Đèn báo lỗi bus CAN. ERR: Chỉ báo lỗi mô-đun. |
|
| phím SMK | Chìa khóa thông minh SMK. | |
| WO-C-1608P | COM1 (DB9) nữ |
Một giao diện RS485, hỗ trợ Modbus RTU giao thức chủ/tớ. |
| COM2 (DB9) nữ |
Một giao diện RS485 và giao diện CAN khác Giao diện RS485 hỗ trợ giao thức chủ/phụ Modbus RTU và giao diện CAN khác hỗ trợ giao thức chủ/phụ CANopen. |
|
| AX70-C-1608N | COM1&COM2 (Thiết bị đầu cuối đẩy vào n) | Hai giao diện RS485, hỗ trợ Modbus RTU giao thức chủ/tớ. |
| CN2 (RJ45) | Giao diện CAN, hỗ trợ giao thức CAN open master/slave. | |
| CN3 (RJ45) | Giao diện Ether CAT | |
| CN4 (RJ45) | 1. Giao thức Modbus TCP 2.Chức năng Ethernet tiêu chuẩn 3. Tải xuống và gỡ lỗi chương trình người dùng (chỉ với IPv4) |
|
| Ống kỹ thuật số | Hiển thị cảnh báo và trả lời khi nhấn phím SMK. | |
| chỉ báo vào/ra | Cho biết tín hiệu của 16 đầu vào và 8 đầu ra có hợp lệ hay không. | |
| Giao diện thẻ SD | Được sử dụng để lưu trữ các chương trình và dữ liệu của người dùng. | |
| Chạy chỉ báo | Cho biết liệu mô-đun CPU có đang chạy hay không. | |
| Giao diện USB | Được sử dụng để tải xuống và gỡ lỗi chương trình. | |
| I/O tốc độ cao | 16 đầu vào tốc độ cao và 8 đầu ra tốc độ cao. | |
| Giao diện mở rộng cục bộ | Hỗ trợ mở rộng 16 mô-đun I/O, không cho phép hoán đổi nóng. | |
| Giao diện nguồn 24V | điện áp DC 24Vtagđầu vào e | |
| công tắc nối đất | Công tắc kết nối giữa mặt đất kỹ thuật số bên trong hệ thống và mặt đất nhà ở. Nó bị ngắt kết nối theo mặc định (SW1 được đặt thành 0). Nó chỉ được sử dụng trong các tình huống đặc biệt trong đó mặt đất kỹ thuật số bên trong hệ thống được lấy làm mặt phẳng tham chiếu. Thận trọng trước khi vận hành nó. Nếu không, sự ổn định của hệ thống bị ảnh hưởng. | |
| Công tắc DIP của điện trở đầu cuối | BẬT cho biết kết nối điện trở đầu cuối (nó TẮT theo mặc định). COM1 tương ứng với RS485-1, COM2 tương ứng với RS485-2 và CAN tương ứng với CAN. | |
phím SMK
Phím SMK chủ yếu được sử dụng để đặt lại địa chỉ IP của mô-đun CPU (rP) và xóa các chương trình ứng dụng (cA). Địa chỉ mô-đun CPU mặc định là 192.168.1.10. Nếu bạn muốn khôi phục địa chỉ mặc định từ địa chỉ IP đã sửa đổi, bạn có thể khôi phục địa chỉ mặc định thông qua khóa SMK. Phương pháp như sau:
- Đặt mô-đun CPU ở trạng thái STOP. Nhấn phím SMK. Khi ống kỹ thuật số hiển thị “rP”, nhấn và giữ phím SMK. Sau đó, ống kỹ thuật số hiển thị “rP” và tắt lần lượt, cho biết việc đặt lại địa chỉ IP đang được thực hiện. Thao tác thiết lập lại thành công khi ống kỹ thuật số tắt ổn định. Nếu bạn nhả phím SMK vào lúc này, ống kỹ thuật số sẽ hiển thị “rP”. Nhấn và giữ phím SMK cho đến khi ống hiển thị “00” (rP—cA—rU-rP).
- Nếu bạn nhả phím SMK trong quá trình ống kỹ thuật số hiển thị “rP” và tắt lần lượt, thao tác đặt lại địa chỉ IP sẽ bị hủy và ống kỹ thuật số hiển thị “rP”.
Để xóa một chương trình khỏi mô-đun CPU, hãy thực hiện như sau:
Nhấn phím SMK. Khi ống kỹ thuật số hiển thị “cA”, nhấn và giữ phím SMK. Sau đó, ống kỹ thuật số hiển thị “rP” và tắt lần lượt, cho biết chương trình đang bị xóa. Khi ống kỹ thuật số đã tắt ổn định, hãy khởi động lại mô-đun CPU. Chương trình được xóa thành công.
Mô tả ống kỹ thuật số
- Nếu các chương trình không có lỗi sau khi tải xuống, ống kỹ thuật số của mô-đun CPU sẽ hiển thị “00” đều đặn.
- Nếu một chương trình có lỗi, ống kỹ thuật số sẽ hiển thị thông tin lỗi theo cách nhấp nháy.
- Ví dụample, nếu chỉ xảy ra lỗi 19, ống kỹ thuật số sẽ hiển thị “19” và tắt luân phiên. Nếu lỗi 19 và lỗi 29 xảy ra đồng thời, ống kỹ thuật số hiển thị “19”, tắt, hiển thị “29” và tắt luân phiên. Nếu nhiều lỗi xảy ra đồng thời, cách hiển thị tương tự.
Định nghĩa thiết bị đầu cuối
AX7![]() -C-1608P Định nghĩa trạm giao tiếp COM1/COM2
-C-1608P Định nghĩa trạm giao tiếp COM1/COM2
Đối với mô-đun CPU AX7LJ-C-1608P, COM1 là thiết bị đầu cuối giao tiếp RS485 và COM2 là thiết bị đầu cuối giao tiếp RS485/CAN, cả hai đều sử dụng đầu nối DB9 để truyền dữ liệu. Các giao diện và chân được mô tả trong phần sau.
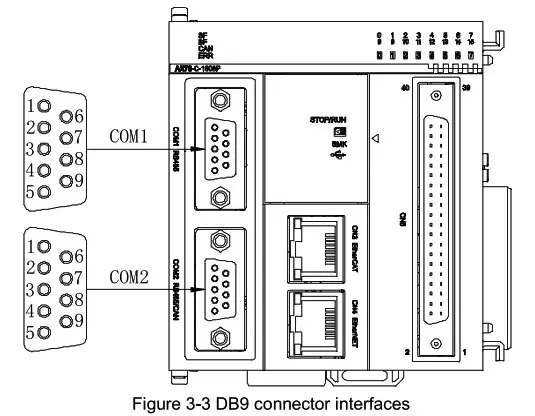
Bảng 3-1 Chân đầu nối COM1/COM2 DB39
| Giao diện | Phân bổ | Ghim | Sự định nghĩa | Chức năng |
| COM1 (RS485) |
1 | / | / | |
| 2 | / | / | ||
| 3 | / | / | ||
| 4 | RS485A | Tín hiệu vi sai RS485 + | ||
| 5 | RS485B | Tín hiệu vi sai RS485 - | ||
| 6 | / | / | ||
| 7 | / | / | ||
| 8 | / | / | ||
| 9 | GND_RS485 | nối đất RS485 | ||
| COM2 (RS485/CÓ THỂ) |
1 | / | / | |
| 2 | TÔI CÓ THỂ | Tín hiệu vi sai CAN – | ||
| 3 | / | / | ||
| 4 | RS485A | Tín hiệu vi sai RS485 + | ||
| 5 | RS485B | Tín hiệu vi sai RS485 - | ||
| 6 | GND_CAN | CÓ THỂ nối đất | ||
| 7 | CÓ THỂ _H | Tín hiệu vi sai CAN + | ||
| 8 | / | / | ||
| 9 | GND_RS485 | nối đất RS485 |
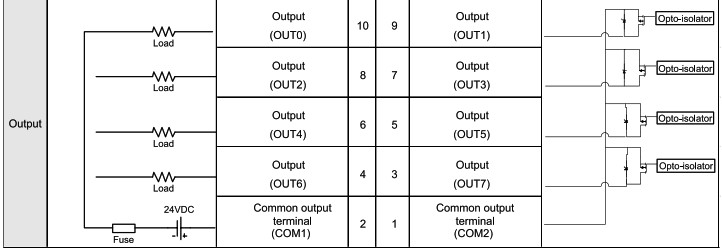
AX7![]() -C-1608P định nghĩa thiết bị đầu cuối I/O tốc độ cao
-C-1608P định nghĩa thiết bị đầu cuối I/O tốc độ cao
AX7![]() -Mô-đun CPU C-1608P có 16 đầu vào tốc độ cao và 8 đầu ra tốc độ cao. Các giao diện và chân được mô tả trong phần sau.
-Mô-đun CPU C-1608P có 16 đầu vào tốc độ cao và 8 đầu ra tốc độ cao. Các giao diện và chân được mô tả trong phần sau.
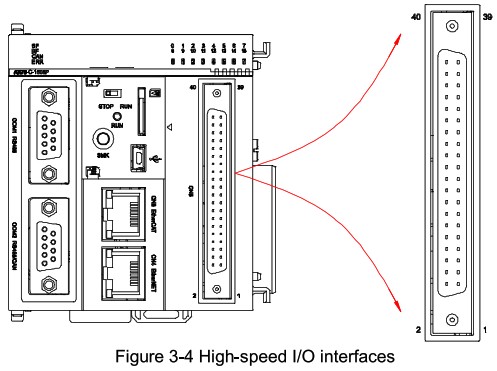
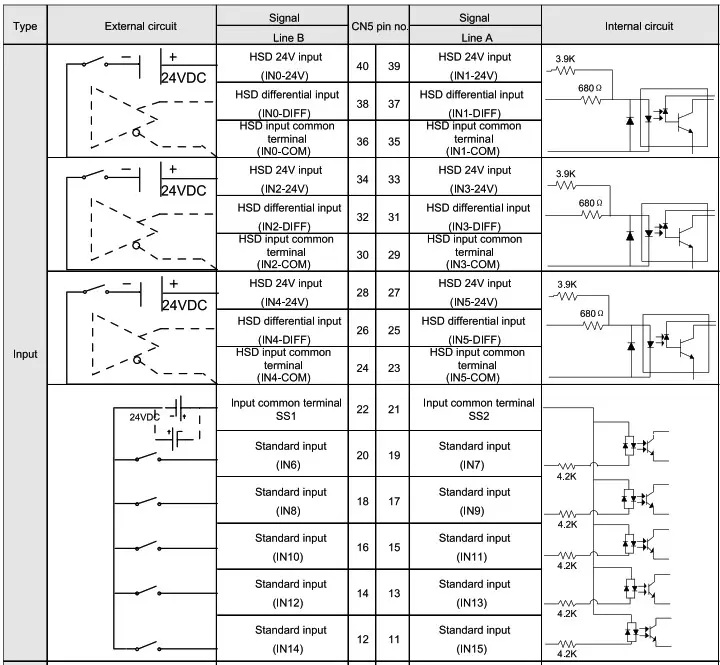
Bảng 3-2 Các chân I/O tốc độ cao
AX7![]() -C-1608N Định nghĩa trạm giao tiếp COM1/CN2
-C-1608N Định nghĩa trạm giao tiếp COM1/CN2
Đối với AX7![]() -Mô-đun CPU C-1608N, COM1 là thiết bị đầu cuối giao tiếp RS485 hai kênh, sử dụng đầu nối đẩy 12 chân để truyền dữ liệu. CN2 là thiết bị đầu cuối giao tiếp CAN, sử dụng đầu nối RJ45 để truyền dữ liệu. Các giao diện và chân được mô tả trong phần sau.
-Mô-đun CPU C-1608N, COM1 là thiết bị đầu cuối giao tiếp RS485 hai kênh, sử dụng đầu nối đẩy 12 chân để truyền dữ liệu. CN2 là thiết bị đầu cuối giao tiếp CAN, sử dụng đầu nối RJ45 để truyền dữ liệu. Các giao diện và chân được mô tả trong phần sau.

Bảng 3-3 Chân đầu nối COM1/ CN2
| Các chức năng thiết bị đầu cuối đẩy vào của COM1 | ||||
| Sự định nghĩa | Chức năng | Ghim | ||
| COM1 RS485 | A | Tín hiệu vi sai RS485 + |
12 | |
| B | Tín hiệu vi sai RS485 - | 10 | ||
| GND | Nguồn chip RS485 _1 đất |
8 | ||
| PE | Mặt đất che chắn | 6 | ||
| COM2 RS485 | A | Tín hiệu vi sai RS485 + |
11 | |
| B | Tín hiệu vi sai RS485 - | 9 | ||
| GND | Nguồn chip RS485_2 đất |
7 | ||
| PE | Mặt đất che chắn | 5 | ||
| Lưu ý: Chân 1-4 không được sử dụng. | ||||
| Chức năng chân của CN2 | ||||
| Sự định nghĩa | Chức năng | Ghim | ||
| HỦY | GND | CÓ THỂ nối đất | 1 | |
| TÔI CÓ THỂ | Tín hiệu vi sai CAN – | 7 | ||
| CÓ THỂ_H | Tín hiệu vi sai CAN + | 8 | ||
| Lưu ý: Chân 2-6 không được sử dụng. | ||||
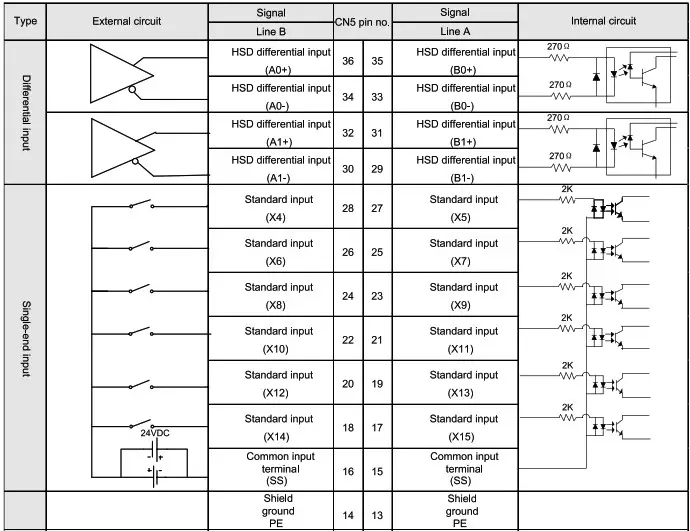
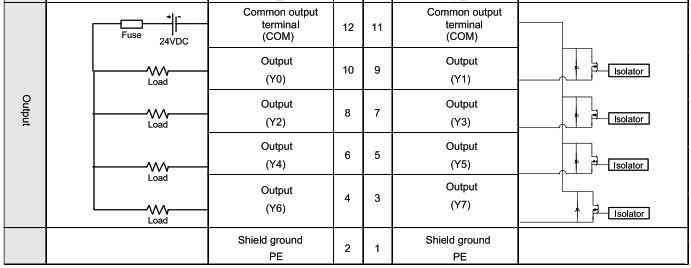
AX7![]() -C-1608N định nghĩa thiết bị đầu cuối I/O tốc độ cao
-C-1608N định nghĩa thiết bị đầu cuối I/O tốc độ cao
AX7![]() Mô-đun CPU 1-C-1608N có 16 đầu vào tốc độ cao và 8 đầu ra tốc độ cao. Hình dưới đây cho thấy phân phối thiết bị đầu cuối và bảng sau đây liệt kê các chân.
Mô-đun CPU 1-C-1608N có 16 đầu vào tốc độ cao và 8 đầu ra tốc độ cao. Hình dưới đây cho thấy phân phối thiết bị đầu cuối và bảng sau đây liệt kê các chân.
Bảng 3-4 Các chân I/O tốc độ cao
Ghi chú:
- Tất cả 16 kênh đầu vào của AX7
 -Mô-đun CPU C-1608P cho phép đầu vào tốc độ cao, nhưng 6 kênh đầu tiên hỗ trợ đầu vào vi sai hoặc một đầu 24V và 10 kênh cuối cùng hỗ trợ đầu vào một đầu 24V.
-Mô-đun CPU C-1608P cho phép đầu vào tốc độ cao, nhưng 6 kênh đầu tiên hỗ trợ đầu vào vi sai hoặc một đầu 24V và 10 kênh cuối cùng hỗ trợ đầu vào một đầu 24V. - Tất cả 16 kênh đầu vào của AX7-Mô-đun CPU C-1608N cho phép đầu vào tốc độ cao, nhưng 4 kênh đầu tiên hỗ trợ đầu vào vi sai và 12 kênh cuối cùng hỗ trợ đầu vào một đầu 24V.
- Mỗi điểm I/O được cách ly với mạch bên trong.
- Tổng chiều dài của cáp kết nối cổng I/O tốc độ cao không được vượt quá 3 mét.
- Không uốn cong dây cáp khi siết chặt dây cáp.
- Trong khi định tuyến cáp, hãy tách riêng các cáp kết nối khỏi các cáp công suất cao gây nhiễu mạnh nhưng không buộc các cáp kết nối với cáp sau lại với nhau. Ngoài ra, tránh định tuyến song song đường dài.
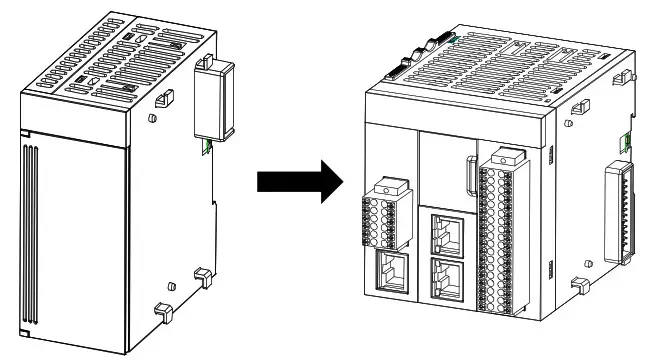
Cài đặt mô-đun
Sử dụng thiết kế kiểu mô-đun, bộ điều khiển khả trình dễ cài đặt và bảo trì. Đối với mô-đun CPU, các đối tượng kết nối chính là mô-đun cấp nguồn và mở rộng.
Các mô-đun được kết nối bằng cách sử dụng các giao diện kết nối do mô-đun cung cấp và khớp nối nhanh.
Quy trình lắp như sau:
| Bước 1 Trượt chốt lắp trên mô-đun CPU theo hướng minh họa trong hình dưới đây (sử dụng mô-đun nguồn kết nối cho example). |
Bước 2 Căn chỉnh mô-đun CPU với đầu nối mô-đun nguồn để khóa liên động. |
 |
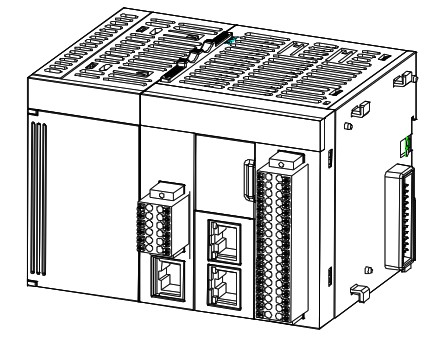 |
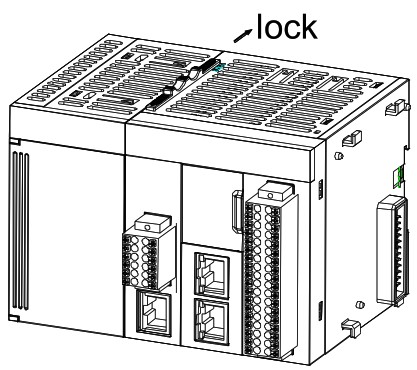
| Bước 3 Trượt chốt lắp trên mô-đun CPU theo hướng minh họa trong hình dưới đây để kết nối và khóa hai mô-đun. | Bước 4 Đối với việc lắp đặt thanh ray DIN tiêu chuẩn, hãy móc mô-đun tương ứng vào thanh ray lắp đặt tiêu chuẩn cho đến khi khớp nối khớp vào vị trí. |
 |
 |
Kết nối cáp và thông số kỹ thuật
Kết nối xe buýt Ether CAT
Thông số kỹ thuật xe buýt Ether CAT
| Mục | Sự miêu tả |
| Giao thức truyền thông | Ether MÈO |
| dịch vụ được hỗ trợ | COE (PDO/SDO) |
| tối thiểu khoảng thời gian đồng bộ hóa | 1ms/4 trục (Giá trị tiêu biểu) |
| Phương pháp đồng bộ hóa | DC để đồng bộ hóa/DC không sử dụng |
| Lớp vật lý | 100BASE-TX |
| Chế độ hai mặt | song công hoàn toàn |
| cấu trúc liên kết | Kết nối nối tiếp |
| Phương tiện truyền dẫn | Cáp mạng (xem phần “Lựa chọn cáp”) |
| Khoảng cách truyền dẫn | Ít hơn 100m giữa hai nút |
| Số nút nô lệ | Lên đến 125 |
| Chiều dài khung Ether CAT | 44 byte-1498 byte |
| Xử lý dữ liệu | Lên đến 1486 byte chứa trong một khung hình |
Lựa chọn cáp
Mô-đun CPU có thể thực hiện giao tiếp bus Ether CAT thông qua cổng CN3. Cáp tiêu chuẩn INVT được khuyến nghị. Nếu bạn tự làm cáp truyền thông, hãy đảm bảo cáp đáp ứng các yêu cầu sau:
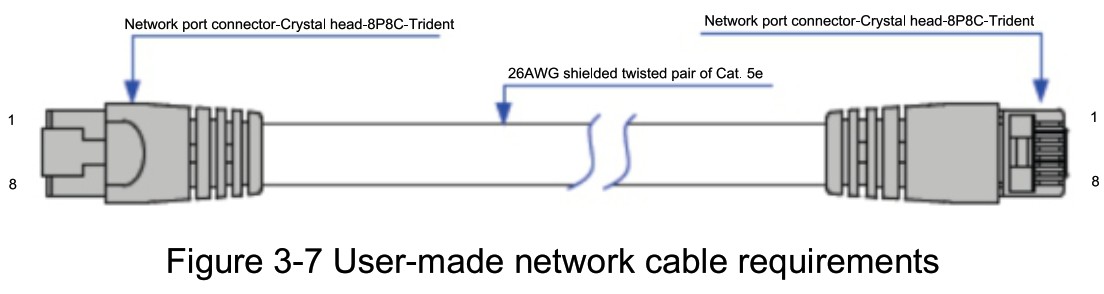
Ghi chú:
- Cáp thông tin liên lạc bạn sử dụng phải vượt qua 100% bài kiểm tra độ dẫn điện, không đoản mạch, hở mạch, trật khớp hoặc tiếp xúc kém.
- Để đảm bảo chất lượng truyền thông, chiều dài cáp truyền thông EtherCAT không được vượt quá 100 mét.
- Bạn nên tạo cáp giao tiếp bằng cách sử dụng cáp xoắn đôi có vỏ bọc thuộc loại 5e, tuân thủ EIA/TIA568A, EN50173, ISO/IEC11801, TSB bản tin EIA/TIA và EIA/TIA SB40-A&TSB36.
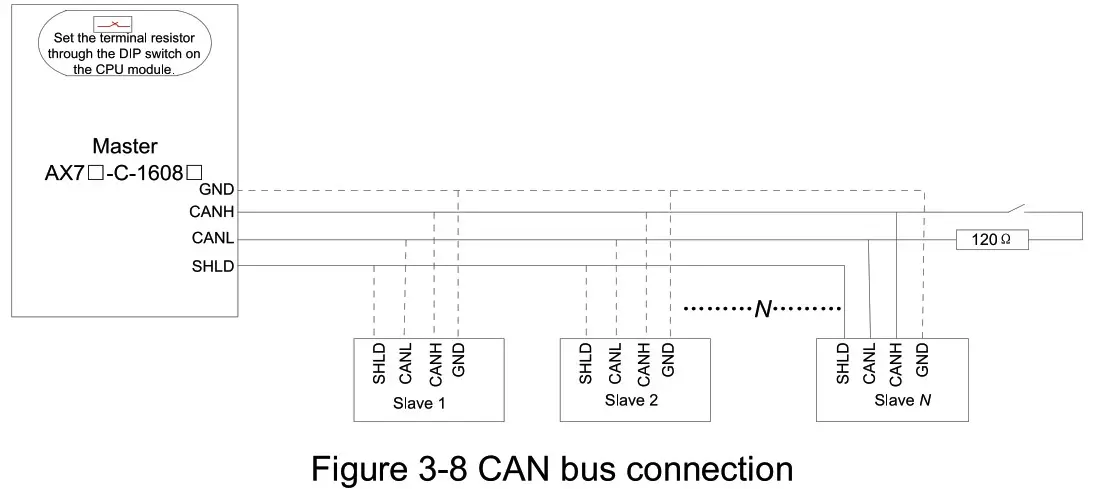
CÓ THỂ mở kết nối cáp
Mạng lưới
Cấu trúc cấu trúc liên kết kết nối bus CAN được hiển thị trong hình dưới đây. Nên sử dụng cặp dây xoắn được che chắn cho kết nối bus CAN. Mỗi đầu của bus CAN kết nối với một điện trở đầu cuối 1200 để ngăn phản xạ tín hiệu. Trong hầu hết các trường hợp, lớp lá chắn sử dụng nối đất một điểm.
Lựa chọn cáp
- Đối với AX7-Mô-đun CPU C-1608P, cùng một thiết bị đầu cuối được sử dụng cho cả giao tiếp CANopen và giao tiếp RS485, sử dụng đầu nối DB9 để truyền dữ liệu. Các chân trong đầu nối DB9 đã được mô tả trước đó.
- Đối với AX7Mô-đun CPU 1-C-1608N, thiết bị đầu cuối RJ45 được sử dụng cho giao tiếp CANopen để truyền dữ liệu. Các chân trong đầu nối RJ45 đã được mô tả trước đó.
Cáp tiêu chuẩn INVT được khuyến nghị. Nếu bạn tự chế tạo cáp truyền thông, hãy chế tạo cáp theo mô tả chân cắm và đảm bảo quy trình sản xuất cũng như các thông số kỹ thuật đáp ứng yêu cầu truyền thông.
Ghi chú:
- Để tăng cường khả năng chống nhiễu của cáp, bạn nên sử dụng kỹ thuật che chắn bằng lá nhôm và kỹ thuật che chắn bện nhôm-magiê khi chế tạo cáp.
- Sử dụng kỹ thuật quấn dây xoắn đôi cho cáp vi sai.
Kết nối giao tiếp nối tiếp RS485
Mô-đun CPU hỗ trợ 2 kênh giao tiếp RS485.
- Đối với AX7-Mô-đun CPU C-1608P, các cổng COM1 và COM2 sử dụng đầu nối DB9 để truyền dữ liệu. Các chân trong đầu nối DB9 đã được mô tả trước đó.
- Đối với AX7-Mô-đun CPU C-1608N, cổng sử dụng đầu nối đầu cuối đẩy vào 12 chân để truyền dữ liệu. Các chân trong đầu nối đầu cuối đã được mô tả trước đó.
Cáp tiêu chuẩn INVT được khuyến nghị. Nếu bạn tự chế tạo cáp truyền thông, hãy chế tạo cáp theo mô tả chân cắm và đảm bảo quy trình sản xuất cũng như các thông số kỹ thuật đáp ứng yêu cầu truyền thông.
Ghi chú:
- Để tăng cường khả năng chống nhiễu của cáp, bạn nên sử dụng kỹ thuật che chắn bằng lá nhôm và kỹ thuật che chắn bện nhôm-magiê khi chế tạo cáp.
- Sử dụng kỹ thuật quấn dây xoắn đôi cho cáp vi sai.
Kết nối Ethernet
Mạng lưới
Cổng Ethernet của mô-đun CPU là CN4, cổng này có thể kết nối với thiết bị khác như máy tính hoặc thiết bị HMI bằng cách sử dụng cáp mạng ở chế độ điểm-điểm.
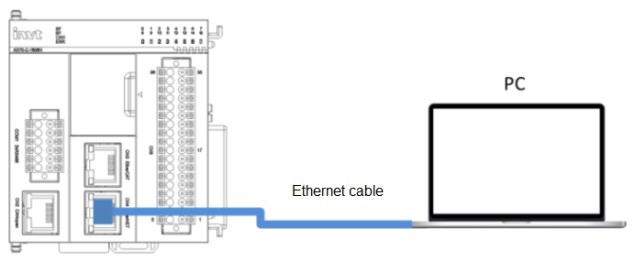
Hình 3-9 Kết nối Ethernet
Bạn cũng có thể kết nối cổng Ethernet với bộ tập trung hoặc bộ chuyển mạch bằng cách sử dụng cáp mạng, thực hiện kết nối đa điểm.

Hình 3-10Mạng Ethernet
Lựa chọn cáp
Để cải thiện độ tin cậy của giao tiếp, hãy sử dụng cáp xoắn đôi có vỏ bọc thuộc loại 5 trở lên làm cáp Ethernet. Cáp tiêu chuẩn INVT được khuyến nghị.
Sử dụng hướng dẫn
Thông số kỹ thuật
Thông số kỹ thuật chung của mô-đun CPU
| Mục | Sự miêu tả | |||||
| Đầu vào voltage | 24VDC | |||||
| Tiêu thụ điện năng | < 15W | |||||
| Mất điện thời gian bảo vệ |
300ms (không bảo vệ trong vòng 20 giây sau khi bật nguồn) | |||||
| Pin dự phòng của đồng hồ thời gian thực |
Được hỗ trợ | |||||
| Nguồn xe buýt bảng nối đa năng cung cấp |
5V/2.5A | |||||
| Phương pháp lập trình | Ngôn ngữ lập trình theo tiêu chuẩn IEC 61131-3 (LD, FBD, IL, ST, SFC, và CFC) |
|||||
| Thực hiện chương trình phương pháp |
địa phương trực tuyến | |||||
| Lưu trữ chương trình người dùng không gian |
10MB | |||||
| Không gian bộ nhớ flash vì mất điện sự bảo vệ |
512KB | |||||
| Thẻ SD thông số kỹ thuật |
32GMicroSD | |||||
| Yếu tố mềm và đặc trưng |
||||||
| Yếu tố | Tên | Đếm | Đặc điểm lưu trữ | |||
| Mặc định | có thể ghi được | Sự miêu tả | ||||
| I | Rơle đầu vào | 64KTừ | Không lưu | KHÔNG | X: 1 bit B. 8 bit W: 16 bit D: 32 bit L: 64 bit | |
| Q | Rơ le đầu ra | 64KTừ | Không lưu | KHÔNG | ||
| M | Đầu ra phụ trợ | 256KTừ | Cứu | Đúng | ||
| duy trì chương trình phương pháp khi quyền lực sự thất bại |
Lưu giữ bằng đèn flash bên trong | |||||
| chế độ gián đoạn | Tín hiệu DI tốc độ cao của mô-đun CPU có thể được đặt làm đầu vào ngắt, cho phép tối đa tám điểm đầu vào và có thể đặt các chế độ ngắt cạnh lên và cạnh xuống. | |||||
Thông số I/O tốc độ cao
Thông số kỹ thuật đầu vào tốc độ cao
| Mục | Thông số kỹ thuật | |
| Tên tín hiệu | Đầu vào vi sai tốc độ cao | Đầu vào một đầu tốc độ cao |
| Đầu vào định mức tậptage |
2.5V | 24VDC (-15% — +20%, dao động trong vòng 5%) |
| Đầu vào định mức hiện hành |
6.8mA | 5.7mA (Giá trị tiêu biểu) (ở 24V DC) |
| Trên hiện tại | / | Dưới 2mA |
| TẮT hiện tại | / | Dưới 1mA |
| Điện trở đầu vào | 5400 | 2.2k0 |
| tối đa. đếm tốc độ |
800K Xung/giây (tần số gấp 2 lần 200PH), XNUMXkHz (kênh đầu vào đơn) | |
| Nhiệm vụ đầu vào 2PH tỉ lệ |
40%. 60% | |
| Thiết bị đầu cuối chung | / | Một thiết bị đầu cuối chung được sử dụng. |
Thông số kỹ thuật đầu ra tốc độ cao
| Mục | Thông số kỹ thuật |
| Tên tín hiệu | Đầu ra (YO—Y7) |
| Phân cực đầu ra | AX7 AX7 |
| Mạch điều khiển voltage | Điện áp một chiều 5V-24V |
| Dòng tải định mức | 100mA/điểm, 1A/COM |
| Tối đa voltage thả lúc BẬT | 0.2V (Giá trị tiêu biểu) |
| Dòng rò lúc TẮT | Dưới 0.1mA |
| Tần số đầu ra | 200kHz (Đầu ra 200kHz yêu cầu tải tương đương kết nối bên ngoài phải lớn hơn 12mA.) |
| Thiết bị đầu cuối chung | Cứ tám điểm sử dụng một thiết bị đầu cuối chung. |
Ghi chú:
- Các cổng I/O tốc độ cao có giới hạn về tần số cho phép. Nếu tần số đầu vào hoặc đầu ra vượt quá giá trị cho phép, điều khiển và nhận dạng có thể bất thường. Sắp xếp các cổng I/O hợp lý.
- Giao diện đầu vào vi sai tốc độ cao không chấp nhận mức đầu vào chênh lệch áp suất lớn hơn 7V. Nếu không, mạch đầu vào có thể bị hỏng.
Giới thiệu và download phần mềm lập trình
Giới thiệu phần mềm lập trình
INVTMATIC Studio là phần mềm lập trình bộ điều khiển khả trình do INVT phát triển. Nó cung cấp một môi trường phát triển lập trình mở và tích hợp đầy đủ với công nghệ tiên tiến và các chức năng mạnh mẽ để phát triển dự án dựa trên các ngôn ngữ lập trình tuân thủ theo tiêu chuẩn IEC 61131-3. Nó được sử dụng rộng rãi trong năng lượng, giao thông vận tải, đô thị, luyện kim, hóa chất, dược phẩm, thực phẩm, dệt may, bao bì, in ấn, cao su và nhựa, máy công cụ và các ngành công nghiệp tương tự.
Môi trường chạy và tải xuống
Bạn có thể cài đặt Invtmatic Studio trên máy tính để bàn hoặc máy tính xách tay, trong đó hệ điều hành tối thiểu là Windows 7, dung lượng bộ nhớ tối thiểu 2GB, dung lượng phần cứng trống tối thiểu 10GB và tần số chính của CPU cao hơn 2GHz. Sau đó, bạn có thể kết nối máy tính của mình với mô-đun CPU của bộ điều khiển khả trình thông qua cáp mạng và chỉnh sửa các chương trình người dùng thông qua phần mềm Invtmatic Studio để bạn có thể tải xuống và gỡ lỗi các chương trình người dùng.
ví dụ lập trình
Phần sau đây mô tả cách thực hiện lập trình bằng cách sử dụng máy cũamptập tin (AX72-C-1608N).
Trước hết, hãy kết nối tất cả các mô-đun phần cứng của bộ điều khiển khả trình, bao gồm kết nối nguồn điện với mô-đun CPU, kết nối mô-đun CPU với máy tính đã cài đặt Invtmatic Studio và với mô-đun mở rộng cần thiết, đồng thời kết nối bus EtherCAT với các ổ đĩa động cơ. Khởi động Invtmatic Studio để tạo project và thực hiện cấu hình lập trình.
Quy trình thực hiện như sau:
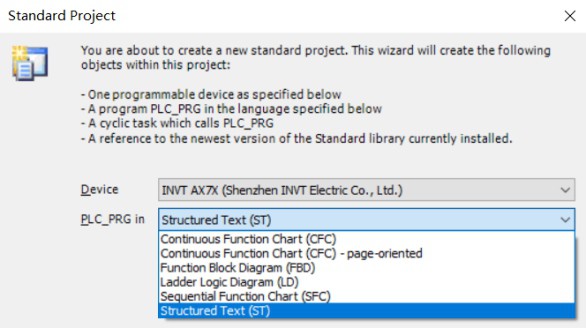
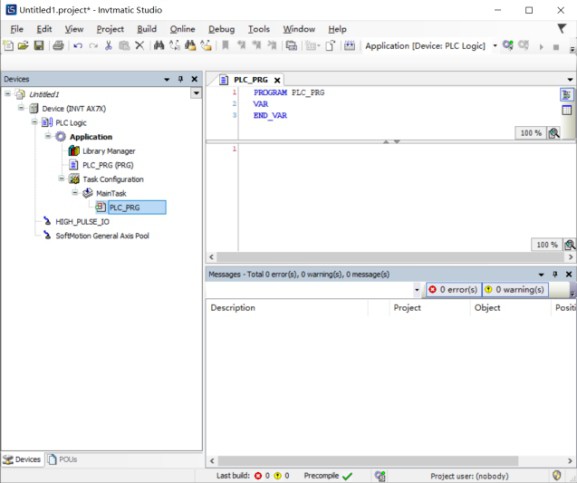
Bước 1 Chọn File > Dự án mới, chọn loại dự án tiêu chuẩn và đặt tên và vị trí lưu dự án. Nhấp vào OK. Sau đó chọn thiết bị INVT AX7X và ngôn ngữ lập trình Văn bản có cấu trúc (ST) trong cửa sổ cấu hình dự án tiêu chuẩn xuất hiện. Giao diện lập trình và cấu hình CODESYS xuất hiện.
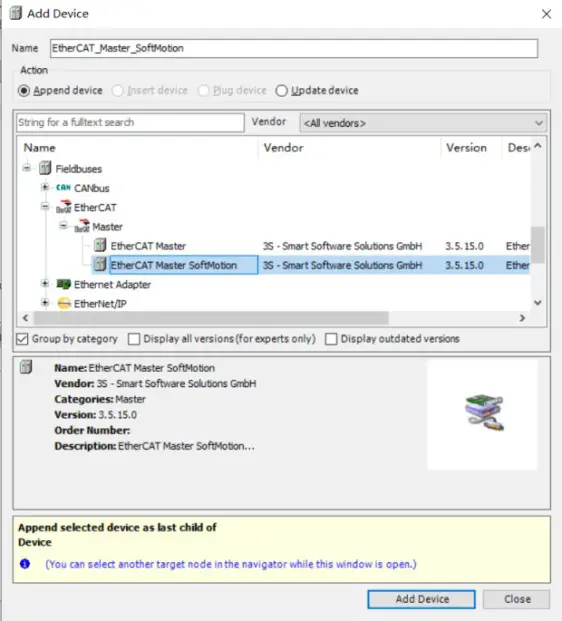
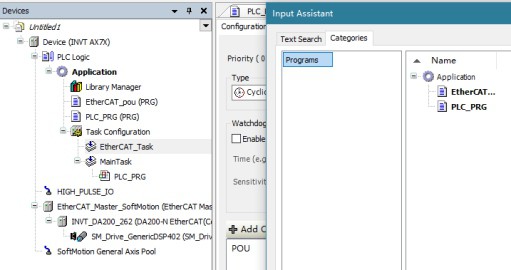
Bước 2 Nhấp chuột phải vào cây điều hướng Thiết bị. Sau đó chọn Thêm thiết bị. Chọn Ether CAT Master Soft Motion.
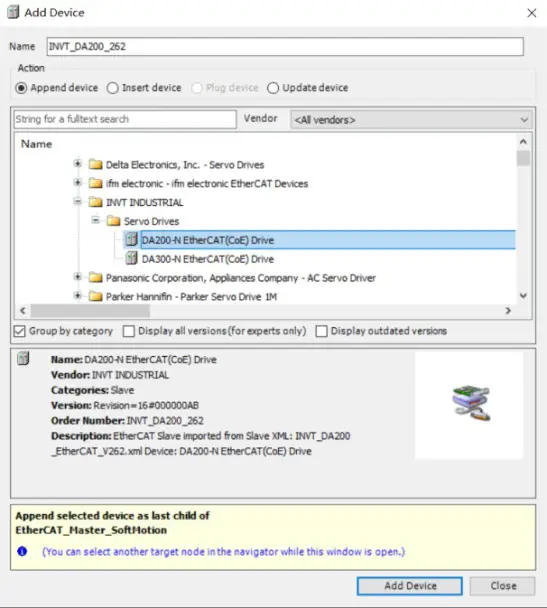
Bước 3 Nhấp chuột phải EtherCAT_Master_SoftMotion trên cây điều hướng bên trái. Chọn Thêm thiết bị. Chọn DA200-N Ether CAT(CoE) Drive trong cửa sổ xuất hiện.
Bước 4 Chọn Thêm trục SoftMotion CiA402 trong menu lối tắt xuất hiện.
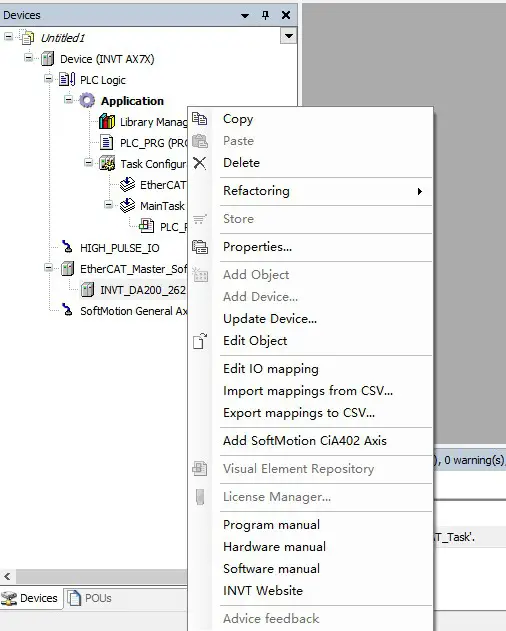
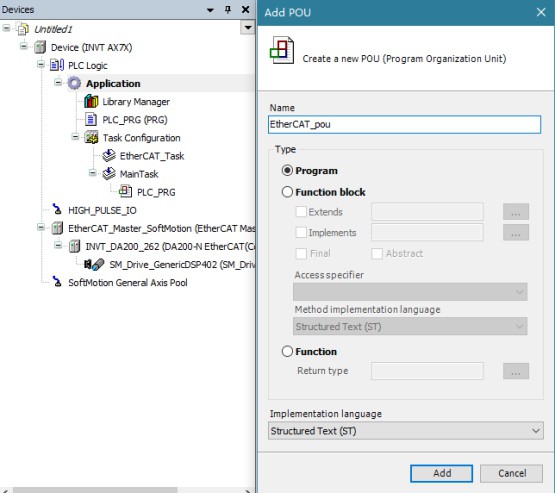
Bước 5 Nhấp chuột phải vào Ứng dụng trên cây điều hướng bên trái và chọn thêm EtherCAT POU. Nhấp đúp vào EtherCAT_Task được tạo tự động để gọi. Chọn EtherCAT_pou đã tạo. Viết chương trình ứng dụng dựa trên tiến trình điều khiển ứng dụng.
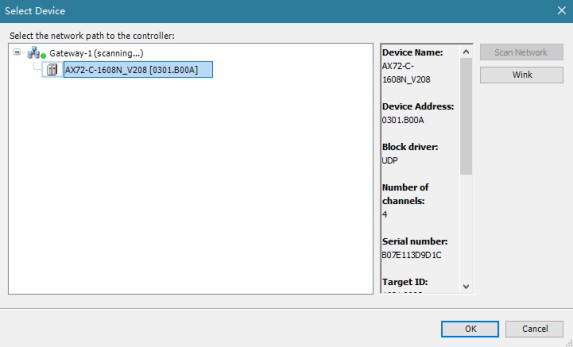
Bước 6 Bấm đúp vào cây điều hướng Thiết bị, bấm Quét mạng, chọn AX72-C-1608N như minh họa trong hình dưới đây và bấm Nháy mắt. Sau đó nhấn OK khi
đèn báo hệ thống CPU nhấp nháy.
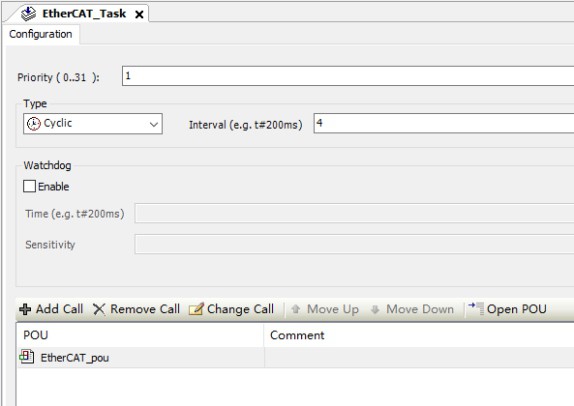
Bước 7 Nhấp đúp vào EtherCAT_Task trong Cấu hình tác vụ ở khung bên trái. Đặt mức độ ưu tiên của tác vụ và khoảng thời gian thực hiện dựa trên yêu cầu thời gian thực của tác vụ.
Trong Invtmatic Studio, bạn có thể nhấp vào ![]() để biên dịch chương trình và bạn có thể kiểm tra lỗi theo nhật ký. Sau khi xác nhận quá trình biên dịch hoàn toàn chính xác, bạn có thể nhấp vào
để biên dịch chương trình và bạn có thể kiểm tra lỗi theo nhật ký. Sau khi xác nhận quá trình biên dịch hoàn toàn chính xác, bạn có thể nhấp vào ![]() để đăng nhập và tải chương trình người dùng xuống bộ điều khiển khả trình và bạn có thể thực hiện gỡ lỗi mô phỏng.
để đăng nhập và tải chương trình người dùng xuống bộ điều khiển khả trình và bạn có thể thực hiện gỡ lỗi mô phỏng.
Kiểm tra trước khi khởi động và bảo trì phòng ngừa
Kiểm tra trước khi khởi động
Nếu bạn đã hoàn thành việc đấu dây, hãy đảm bảo những điều sau đây trước khi khởi động mô-đun hoạt động:
- Cáp đầu ra của mô-đun đáp ứng yêu cầu.
- Các giao diện mở rộng ở mọi cấp độ được kết nối một cách đáng tin cậy.
- Các chương trình ứng dụng sử dụng các phương thức hoạt động và cài đặt tham số chính xác.
Bảo trì phòng ngừa
Thực hiện bảo trì phòng ngừa như sau:
- Thường xuyên vệ sinh bộ điều khiển khả trình, ngăn ngừa vật lạ rơi vào bộ điều khiển và đảm bảo điều kiện thông gió và tản nhiệt tốt cho bộ điều khiển.
- Xây dựng hướng dẫn bảo trì và thường xuyên kiểm tra bộ điều khiển.
- Thường xuyên kiểm tra hệ thống dây điện và các thiết bị đầu cuối để đảm bảo rằng chúng được buộc chặt một cách an toàn.
Thông tin thêm
Xin vui lòng liên hệ với chúng tôi để biết thêm thông tin. Vui lòng cung cấp kiểu sản phẩm và số sê-ri khi thực hiện yêu cầu.
Để có được thông tin sản phẩm hoặc dịch vụ liên quan, bạn có thể:
- Liên hệ với văn phòng địa phương của INVT.
- Thăm nom www.invt.com.
- Quét mã QR sau đây.

Trung tâm Dịch vụ Khách hàng, Công ty TNHH Điện tử INVT Thâm Quyến
Địa chỉ: Tòa nhà Công nghệ INVT Guangming, Đường Songbai, Matian, Quận Quảng Minh, Thâm Quyến, Trung Quốc
Bản quyền © INVT. Đã đăng ký Bản quyền. Thông tin thủ công có thể thay đổi mà không cần thông báo trước.

202207 (V1.0)
Tài liệu / Tài nguyên
 |
invt Mô-đun CPU Sê-ri AX7 [tập tin pdf] Hướng dẫn sử dụng Mô-đun CPU Sê-ri AX7, Sê-ri AX7, Mô-đun CPU, Mô-đun |



