![]()
การตรวจจับและแก้ไขข้อผิดพลาดของ MICROCHIP บนหน่วยความจำ RTG4 LSRAM

ประวัติการแก้ไข
ประวัติการแก้ไขจะอธิบายการเปลี่ยนแปลงที่เกิดขึ้นในเอกสาร โดยจะแสดงรายการการเปลี่ยนแปลงตามการแก้ไข โดยเริ่มจากการเผยแพร่ครั้งล่าสุด
การแก้ไขครั้งที่ 4.0
ต่อไปนี้เป็นบทสรุปของการเปลี่ยนแปลงที่เกิดขึ้นในการแก้ไขนี้
- อัปเดตเอกสารสำหรับ Libero SoC v2021.2
- เพิ่มภาคผนวก 1: การเขียนโปรแกรมอุปกรณ์โดยใช้ FlashPro Express หน้า 14
- เพิ่มภาคผนวก 2: การเรียกใช้สคริปต์ TCL หน้า 16
- ลบการอ้างอิงถึงหมายเลขเวอร์ชัน Libero
การแก้ไขครั้งที่ 3.0
อัปเดตเอกสารสำหรับการเปิดตัวซอฟต์แวร์ Libero v11.9 SP1
การแก้ไขครั้งที่ 2.0
อัปเดตเอกสารสำหรับการเปิดตัวซอฟต์แวร์ Libero v11.8 SP2
การแก้ไขครั้งที่ 1.0
การตีพิมพ์ครั้งแรกของเอกสารนี้
การตรวจจับและแก้ไขข้อผิดพลาดบนหน่วยความจำ RTG4 LSRAM
การออกแบบอ้างอิงนี้จะอธิบายความสามารถในการตรวจจับและแก้ไขข้อผิดพลาด (EDAC) ของ LSRAM FPGA RTG4™ ในสภาพแวดล้อมที่ไวต่อเหตุการณ์ที่เกิดขึ้นครั้งเดียว (SEU) RAM มีแนวโน้มที่จะเกิดข้อผิดพลาดชั่วคราวที่เกิดจากไอออนหนัก ข้อผิดพลาดเหล่านี้สามารถตรวจพบและแก้ไขได้ด้วยการใช้รหัสแก้ไขข้อผิดพลาด (ECC) บล็อก RAM FPGA RTG4 มีตัวควบคุม EDAC ในตัวเพื่อสร้างรหัสแก้ไขข้อผิดพลาดสำหรับแก้ไขข้อผิดพลาด 1 บิตหรือตรวจจับข้อผิดพลาด 2 บิต
หากตรวจพบข้อผิดพลาด 1 บิต ตัวควบคุม EDAC จะแก้ไขบิตข้อผิดพลาดและตั้งค่าแฟล็กการแก้ไขข้อผิดพลาด (SB_CORRECT) เป็นแอ็คทีฟไฮ หากตรวจพบข้อผิดพลาด 2 บิต ตัวควบคุม EDAC จะตั้งค่าแฟล็กการตรวจจับข้อผิดพลาด (DB_DETECT) เป็นแอ็คทีฟไฮ
สำหรับข้อมูลเพิ่มเติมเกี่ยวกับฟังก์ชัน RTG4 LSRAM EDAC โปรดดู UG0574: RTG4 FPGA Fabric
คู่มือผู้ใช้
ในการออกแบบอ้างอิงนี้ ข้อผิดพลาด 1 บิตหรือข้อผิดพลาด 2 บิตจะถูกนำเสนอผ่าน SmartDebug GUI EDAC จะถูกสังเกตโดยใช้อินเทอร์เฟซผู้ใช้แบบกราฟิก (GUI) โดยใช้อินเทอร์เฟซ UART เพื่อเข้าถึง LSRAM สำหรับการอ่าน/เขียนข้อมูล Libero® System-on-Chip (SoC) SmartDebug (JTAG) ใช้ในการฉีดข้อผิดพลาดเข้าสู่หน่วยความจำ LSRAM
ข้อกำหนดด้านการออกแบบ
ตารางที่ 1 แสดงรายการข้อกำหนดการออกแบบอ้างอิงสำหรับการรันการสาธิต RTG4 LSRAM EDAC
ตารางที่ 1 • ข้อกำหนดการออกแบบ

ซอฟต์แวร์
- ลิเบโร โซซี
- แฟลชโปร เอ็กซ์เพรส
- สมาร์ทดีบัก
- ไดรเวอร์พีซีโฮสต์ ไดรเวอร์ USB ถึง UART
บันทึก: ภาพหน้าจอของ Libero SmartDesign และการกำหนดค่าที่แสดงในคู่มือนี้มีวัตถุประสงค์เพื่อเป็นภาพประกอบเท่านั้น
เปิดการออกแบบ Libero เพื่อดูการอัปเดตล่าสุด
ข้อกำหนดเบื้องต้น
ก่อนที่คุณจะเริ่มต้น:
ดาวน์โหลดและติดตั้ง Libero SoC (ตามที่ระบุในไฟล์ webไซต์สำหรับการออกแบบนี้) บนโฮสต์พีซีจากตำแหน่งต่อไปนี้: https://www.microsemi.com/product-directory/design-resources/1750-libero-soc
การออกแบบสาธิต
ดาวน์โหลดการออกแบบการสาธิต fileจากไมโครเซมิ webเว็บไซต์อยู่ที่: http://soc.microsemi.com/download/rsc/?f=rtg4_dg0703_df
การออกแบบสาธิต fileรวมถึง:
- โครงการ Libero SoC
- ตัวติดตั้ง GUI
- การเขียนโปรแกรม files
- อ่าน me.txt file
- TCL_สคริปต์
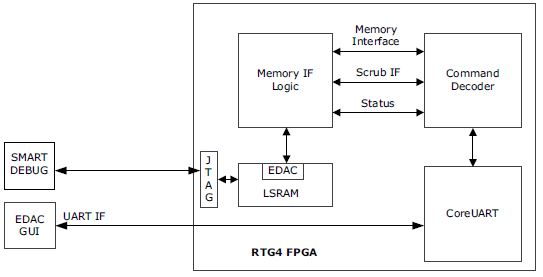
แอปพลิเคชัน GUI บนพีซีโฮสต์จะออกคำสั่งไปยังอุปกรณ์ RTG4 ผ่านทางอินเทอร์เฟซ USB-UART อินเทอร์เฟซ UART นี้ได้รับการออกแบบด้วย CoreUART ซึ่งเป็น IP ลอจิกจากแค็ตตาล็อก Libero SoC IP CoreUART ใน RTG4 Fabric จะรับคำสั่งและส่งคำสั่งไปยังลอจิกตัวถอดรหัสคำสั่ง ลอจิกตัวถอดรหัสคำสั่งจะถอดรหัสคำสั่งอ่านหรือเขียน ซึ่งจะดำเนินการโดยใช้ลอจิกอินเทอร์เฟซหน่วยความจำ
บล็อกอินเทอร์เฟซหน่วยความจำใช้สำหรับอ่าน/เขียนและตรวจสอบแฟล็กข้อผิดพลาดของ LSRAM EDAC ในตัวจะแก้ไขข้อผิดพลาด 1 บิตขณะอ่านจาก LSRAM และจัดเตรียมข้อมูลที่แก้ไขแล้วให้กับอินเทอร์เฟซผู้ใช้ แต่จะไม่เขียนข้อมูลที่แก้ไขแล้วกลับไปยัง LSRAM EDAC ของ LSRAM ในตัวจะไม่นำคุณลักษณะการขัดถูมาใช้ การออกแบบตัวอย่างจะใช้ตรรกะการขัดถู ซึ่งจะตรวจสอบแฟล็กการแก้ไข 1 บิตและอัปเดต LSRAM ด้วยข้อมูลที่แก้ไขแล้วหากเกิดข้อผิดพลาดบิตเดียว
SmartDebug GUI ใช้เพื่อใส่ข้อผิดพลาด 1 บิตหรือ 2 บิตลงในข้อมูล LSRAM
รูปที่ 1 แสดงแผนผังบล็อกระดับบนสุดของการออกแบบสาธิต RTG4 LSRAM EDAC
รูปที่ 1 • บล็อกไดอะแกรมระดับบนสุด
ต่อไปนี้เป็นการกำหนดค่าการออกแบบสาธิต:
- LSRAM ได้รับการกำหนดค่าสำหรับโหมด ×18 และเปิดใช้งาน EDAC ได้โดยเชื่อมต่อสัญญาณ ECC_EN ของ LSRAM เข้ากับสัญญาณสูง
บันทึก: LSRAM EDAC รองรับเฉพาะโหมด ×18 และ ×36 เท่านั้น - IP ของ CoreUART ได้รับการกำหนดค่าให้สื่อสารกับแอปพลิเคชั่นโฮสต์พีซีด้วยอัตราบอดเรท 115200
- RTG4FCCCECALIB_C0 ได้รับการกำหนดค่าให้ทำงานสัญญาณนาฬิกา CoreUART และลอจิกของโครงสร้างอื่นๆ ที่ 80 MHz
คุณสมบัติ
ต่อไปนี้เป็นคุณลักษณะการออกแบบสาธิต:
- อ่านและเขียนไปยัง LSRAM
- ฉีดข้อผิดพลาด 1 บิตและ 2 บิตโดยใช้ SmartDebug
- แสดงค่าจำนวนข้อผิดพลาด 1 บิตและ 2 บิต
- การจัดเตรียมเพื่อล้างค่านับข้อผิดพลาด
- เปิดใช้งานหรือปิดใช้งานตรรกะการล้างหน่วยความจำ
คำอธิบาย
การออกแบบสาธิตนี้เกี่ยวข้องกับการดำเนินการงานต่อไปนี้:
- การเริ่มต้นและการเข้าถึง LSRAM
ลอจิกอินเทอร์เฟซหน่วยความจำที่ใช้งานในลอจิกของแฟบริคจะรับคำสั่งเริ่มต้นจาก GUI และเริ่มต้นตำแหน่งหน่วยความจำ 256 ตำแหน่งแรกของ LSRAM ด้วยข้อมูลส่วนเพิ่ม นอกจากนี้ยังดำเนินการอ่านและเขียนไปยังตำแหน่งหน่วยความจำ 256 ตำแหน่งแรกของ LSRAM โดยรับที่อยู่และข้อมูลจาก GUI สำหรับการดำเนินการอ่าน การออกแบบจะดึงข้อมูลจาก LSRAM และจัดเตรียมข้อมูลดังกล่าวให้กับ GUI เพื่อแสดงผล คาดว่าการออกแบบจะไม่ทำให้เกิดข้อผิดพลาดก่อนใช้ SmartDebug
บันทึก: ตำแหน่งหน่วยความจำที่ไม่ได้ถูกกำหนดค่าอาจมีค่าสุ่ม และ SmartDebug อาจแสดงข้อผิดพลาดแบบบิตเดียวหรือบิตคู่ในตำแหน่งเหล่านั้น
- การใส่ข้อผิดพลาด 1 บิตหรือ 2 บิต
SmartDebug GUI ใช้เพื่อใส่ข้อผิดพลาด 1 บิตหรือ 2 บิตลงในตำแหน่งหน่วยความจำที่ระบุของ LSRAM การดำเนินการต่อไปนี้ดำเนินการโดยใช้ SmartDebug เพื่อใส่ข้อผิดพลาด 1 บิตและ 2 บิตลงใน LSRAM:- เปิด SmartDebug GUI คลิก Debug FPGA Array
- ไปที่แท็บ Memory Blocks เลือกอินสแตนซ์หน่วยความจำ และคลิกขวาที่ Add
- หากต้องการอ่านบล็อกหน่วยความจำ ให้คลิก อ่านบล็อก
- ฉีดข้อผิดพลาดบิตเดียวหรือบิตคู่ลงในตำแหน่งใด ๆ ของ LSRAM ที่มีความลึกที่กำหนด
- หากต้องการเขียนไปยังตำแหน่งที่แก้ไข ให้คลิก เขียนบล็อค
ในระหว่างการดำเนินการอ่านและเขียน LSRAM ผ่าน SmartDebug (JTAG) อินเทอร์เฟซ ตัวควบคุม EDAC จะถูกบายพาสและไม่คำนวณบิต ECC สำหรับการดำเนินการเขียนในขั้นตอน e
- การนับข้อผิดพลาด
เคาน์เตอร์ 8 บิตใช้เพื่อนับจำนวนข้อผิดพลาดและออกแบบเป็นลอจิกของ Fabric เพื่อนับข้อผิดพลาด 1 บิตหรือ 2 บิต ลอจิกตัวถอดรหัสคำสั่งจะให้ค่านับแก่ GUI เมื่อรับคำสั่งจาก GUI
โครงสร้างการตอกบัตร
ในการออกแบบสาธิตนี้ มีโดเมนนาฬิกาหนึ่งโดเมน ออสซิลเลเตอร์ภายใน 50 MHz ขับเคลื่อน RTG4FCCC ซึ่งขับเคลื่อน RTG4FCCCECALIB_C0 ต่อไป RTG4FCCCECALIB_C0 สร้างนาฬิกา 80 MHz ที่มอบแหล่งสัญญาณนาฬิกาให้กับโมดูล COREUART, cmd_decoder, TPSRAM_ECC และ RAM_RW
รูปต่อไปนี้แสดงโครงสร้างการกำหนดเวลาของการออกแบบสาธิต
รูปที่ 2 • โครงสร้างการตอกบัตร

รีเซ็ตโครงสร้าง
ในการออกแบบสาธิตนี้ สัญญาณรีเซ็ตไปยังโมดูล COREUART, cmd_decoder และ RAM_RW จะถูกส่งผ่านพอร์ต LOCK ของ RTG4FCCCECALIB_C0 รูปภาพต่อไปนี้แสดงโครงสร้างการรีเซ็ตของการออกแบบสาธิต
รูปที่ 3 • รีเซ็ตโครงสร้าง

การตั้งค่าการออกแบบสาธิต
หัวข้อต่อไปนี้จะอธิบายวิธีการตั้งค่าชุดพัฒนา RTG4 และ GUI เพื่อรันการออกแบบสาธิต
การตั้งค่าจัมเปอร์
- เชื่อมต่อจัมเปอร์บนชุดพัฒนา RTG4 ตามที่แสดงในตารางที่ 2
ตารางที่ 2 • การตั้งค่าจัมเปอร์จัมเปอร์ พิน (จาก) พิน (ถึง) ความคิดเห็น J11 J17 J19 J21 J23 J26 J27 J28 1 2 ค่าเริ่มต้น เจ 16 2 3 ค่าเริ่มต้น เจ 32 1 2 ค่าเริ่มต้น เจ 33 1 3 ค่าเริ่มต้น 2 4 บันทึก: ปิดสวิตช์แหล่งจ่ายไฟ SW6 ในขณะที่เชื่อมต่อจัมเปอร์
- เชื่อมต่อสาย USB (สายมินิ USB ถึง USB Type-A) เข้ากับ J47 ของชุดพัฒนา RTG4 และปลายอีกด้านหนึ่งของสายเข้ากับพอร์ต USB ของพีซีโฮสต์
- ตรวจสอบให้แน่ใจว่าไดรเวอร์ USB to UART bridge ถูกตรวจพบโดยอัตโนมัติ ซึ่งสามารถตรวจสอบได้ในตัวจัดการอุปกรณ์ของพีซีโฮสต์
รูปที่ 4 แสดงคุณสมบัติของพอร์ตอนุกรม USB 2.0 และตัวแปลง COM31 และ USB อนุกรม C ที่เชื่อมต่ออยู่
รูปที่ 4 • USB to UART Bridge Drivers

บันทึก: หากไม่ได้ติดตั้งไดรเวอร์ USB to UART bridge ให้ดาวน์โหลดและติดตั้งไดรเวอร์จาก www.microsemi.com//documents/CDM_2.08.24_WHQL_Certified.zip
รูปที่ 5 แสดงการตั้งค่าบอร์ดสำหรับการรันการสาธิต EDAC บนชุดพัฒนา RTG4

การเขียนโปรแกรมการออกแบบสาธิต
- เปิดตัวซอฟต์แวร์ Libero SOC
- เพื่อเขียนโปรแกรมชุดพัฒนา RTG4 ด้วยงาน file ให้เป็นส่วนหนึ่งของการออกแบบ fileหากใช้ซอฟต์แวร์ FlashPro Express โปรดดูภาคผนวก 1: การเขียนโปรแกรมอุปกรณ์โดยใช้ FlashPro Express หน้า 14
บันทึก: เมื่อการเขียนโปรแกรมเสร็จสิ้นกับงาน file ผ่านซอฟต์แวร์ FlashPro Express ให้ดำเนินการตาม GUI สาธิต EDAC หน้า 9 มิฉะนั้น ให้ดำเนินการตามขั้นตอนถัดไป - ในกระบวนการออกแบบ Libero ให้คลิกการดำเนินการเรียกใช้โปรแกรม
- เมื่อการเขียนโปรแกรมเสร็จสิ้น เครื่องหมายถูกสีเขียวจะปรากฏข้างหน้าข้อความ 'การดำเนินการเรียกใช้โปรแกรม' เพื่อแจ้งว่าการเขียนโปรแกรมการออกแบบตัวอย่างสำเร็จ

EDAC สาธิต GUI
เดโม EDAC มาพร้อมกับ GUI ที่ใช้งานง่าย ดังที่แสดงในรูปที่ 7 ซึ่งทำงานบนพีซีโฮสต์ที่สื่อสารกับชุดพัฒนา RTG4 UART ใช้เป็นโปรโตคอลการสื่อสารพื้นฐานระหว่างพีซีโฮสต์และชุดพัฒนา RTG4

GUI ประกอบด้วยส่วนต่างๆ ต่อไปนี้:
- การเลือกพอร์ต COM เพื่อสร้างการเชื่อมต่อ UART กับ FPGA RTG4 ด้วยอัตราบอดเรท 115200
- การเขียนหน่วยความจำ LSRAM: เพื่อเขียนข้อมูล 8 บิตไปยังที่อยู่หน่วยความจำ LSRAM ที่ระบุ
- การล้างหน่วยความจำ: เพื่อเปิดใช้งานหรือปิดใช้งานตรรกะการล้างหน่วยความจำ
- การอ่านหน่วยความจำ LSRAM: อ่านข้อมูล 8 บิตจากที่อยู่หน่วยความจำ LSRAM ที่ระบุ
- จำนวนข้อผิดพลาด: แสดงจำนวนข้อผิดพลาดและให้ตัวเลือกเพื่อล้างค่าตัวนับเป็นศูนย์
- จำนวนข้อผิดพลาด 1 บิต: แสดงจำนวนข้อผิดพลาด 1 บิตและให้ตัวเลือกเพื่อล้างค่าตัวนับเป็นศูนย์
- จำนวนข้อผิดพลาด 2 บิต: แสดงจำนวนข้อผิดพลาด 2 บิตและให้ตัวเลือกเพื่อล้างค่าตัวนับเป็นศูนย์
- ข้อมูลบันทึก: ให้ข้อมูลสถานะสำหรับการดำเนินการทุกอย่างที่ดำเนินการโดยใช้ GUI
เรียกใช้การสาธิต
ขั้นตอนต่อไปนี้อธิบายวิธีการรันการสาธิต:
- ไปที่ \v1.2.2\v1.2.2\Exe และดับเบิลคลิก EDAC_GUI.exe ดังที่แสดงในรูปที่ 8
- เลือกพอร์ต COM31 จากรายการและคลิกเชื่อมต่อ

การใส่ข้อผิดพลาดแบบบิตเดี่ยวและการแก้ไขข้อผิดพลาด
- ในการออกแบบ Libero ที่ให้ไว้ ให้คลิกสองครั้งบนการออกแบบ SmartDebug ในขั้นตอนการออกแบบ
- ใน GUI ของ SmartDebug ให้คลิกดีบักอาร์เรย์ FPGA

- ในหน้าต่าง Debug FPGA Array ให้ไปที่แท็บ Memory Blocks มันจะแสดงบล็อก LSRAM ในการออกแบบพร้อมตรรกะและฟิสิคัล viewบล็อกลอจิกจะแสดงด้วยไอคอน L และบล็อกกายภาพจะแสดงด้วยไอคอน P
- เลือกอินสแตนซ์บล็อกฟิสิคัลและคลิกขวาที่เพิ่ม

- หากต้องการอ่านบล็อกหน่วยความจำ ให้คลิก อ่านบล็อก

- ฉีดข้อผิดพลาด 1 บิตลงในข้อมูล 8 บิตที่ตำแหน่งใดก็ได้ของ LSRAM จนถึงความลึก 256 ดังที่แสดงในรูปต่อไปนี้ โดยที่ข้อผิดพลาด 1 บิตจะถูกฉีดที่ตำแหน่งที่ 0 ของ LSRAM
- คลิกเขียนบล็อคเพื่อเขียนข้อมูลที่แก้ไขลงในตำแหน่งที่ต้องการ

- ไปที่ EDAC GUI และป้อนช่องที่อยู่ในส่วนการอ่านหน่วยความจำ LSRAM แล้วคลิกอ่าน ดังที่แสดงในรูปต่อไปนี้
- สังเกตจำนวนข้อผิดพลาด 1 บิตและฟิลด์การอ่านข้อมูลใน GUI ค่าจำนวนข้อผิดพลาดจะเพิ่มขึ้นทีละ 1
ฟิลด์การอ่านข้อมูลจะแสดงข้อมูลที่ถูกต้องในขณะที่ EDAC แก้ไขบิตข้อผิดพลาด
บันทึก: ถ้าไม่ได้เปิดใช้งานการล้างหน่วยความจำ จำนวนข้อผิดพลาดจะเพิ่มขึ้นสำหรับการอ่านทุกครั้งจากที่อยู่ LSRAM เดียวกัน เนื่องจากทำให้เกิดข้อผิดพลาด 1 บิต
การฉีดข้อผิดพลาดแบบบิตคู่และการตรวจจับ
- ดำเนินการขั้นตอนที่ 1 ถึงขั้นตอนที่ 5 ตามที่ระบุไว้ในหัวข้อการใส่และการแก้ไขข้อผิดพลาดบิตเดี่ยว หน้า 10
- ฉีดข้อผิดพลาด 2 บิตลงในข้อมูล 8 บิตที่ตำแหน่งใดๆ ของ LSRAM จนถึงความลึก 256 ดังที่แสดงในรูปต่อไปนี้ โดยที่ข้อผิดพลาด 2 บิตจะถูกฉีดที่ตำแหน่ง 'A' ของ LSRAM
- คลิกเขียนบล็อคเพื่อเขียนข้อมูลที่แก้ไขลงในตำแหน่งที่ต้องการ

- ไปที่ EDAC GUI และป้อนช่องที่อยู่ในส่วนการอ่านหน่วยความจำ LSRAM แล้วคลิกอ่าน ดังที่แสดงในรูปต่อไปนี้
- สังเกตฟิลด์จำนวนข้อผิดพลาด 2 บิตและการอ่านข้อมูลใน GUI ค่าจำนวนข้อผิดพลาดจะเพิ่มขึ้นทีละ 1
ฟิลด์อ่านข้อมูลจะแสดงข้อมูลที่เสียหาย

การดำเนินการทั้งหมดที่ดำเนินการใน RTG4 จะถูกบันทึกในส่วน Serial Console ของ GUI
บทสรุป
การสาธิตนี้เน้นย้ำถึงความสามารถ EDAC ของหน่วยความจำ RTG4 LSRAM ข้อผิดพลาด 1 บิตหรือ 2 บิตได้รับการแนะนำผ่าน SmartDebug GUI การแก้ไขข้อผิดพลาด 1 บิตและการตรวจจับข้อผิดพลาด 2 บิตได้รับการสังเกตโดยใช้ EDAC GUI
การเขียนโปรแกรมอุปกรณ์โดยใช้ FlashPro Express
หัวข้อนี้จะอธิบายวิธีการตั้งโปรแกรมอุปกรณ์ RTG4 ด้วยงานตั้งโปรแกรม file โดยใช้ FlashPro Express
ในการตั้งโปรแกรมอุปกรณ์ ให้ทำตามขั้นตอนต่อไปนี้:
- ตรวจสอบให้แน่ใจว่าการตั้งค่าจัมเปอร์บนบอร์ดเป็นแบบเดียวกับที่แสดงไว้ในตารางที่ 3 ของ UG0617:
คู่มือผู้ใช้ชุดพัฒนา RTG4 - นอกจากนี้ ยังสามารถเลือกตั้งค่าจัมเปอร์ J32 ให้เชื่อมต่อพิน 2-3 ได้เมื่อใช้โปรแกรมเมอร์ FlashPro4, FlashPro5 หรือ FlashPro6 ภายนอกแทนการตั้งค่าจัมเปอร์เริ่มต้นเพื่อใช้ FlashPro5 ที่ฝังไว้
บันทึก: จะต้องปิดสวิตช์แหล่งจ่ายไฟ SW6 ในขณะเชื่อมต่อจัมเปอร์ - ต่อสายไฟเข้ากับขั้วต่อ J9 บนบอร์ด
- เปิดสวิตช์แหล่งจ่ายไฟ SW6
- หากใช้ FlashPro5 แบบฝัง ให้เชื่อมต่อสาย USB เข้ากับขั้วต่อ J47 และพีซีโฮสต์
อีกวิธีหนึ่ง หากใช้โปรแกรมเมอร์ภายนอก ให้เชื่อมต่อสายริบบิ้นเข้ากับ JTAG ส่วนหัว J22 และเชื่อมต่อโปรแกรมเมอร์กับพีซีโฮสต์ - บนพีซีโฮสต์ ให้เปิดซอฟต์แวร์ FlashPro Express
- คลิก New หรือเลือก New Job Project จาก FlashPro Express Job จากเมนู Project เพื่อสร้าง Project งานใหม่ ดังแสดงในรูปต่อไปนี้

- ป้อนข้อมูลต่อไปนี้ใน New Job Project จากกล่องโต้ตอบ FlashPro Express Job:
- งานเขียนโปรแกรม file: คลิก เรียกดู และไปที่ตำแหน่งที่ไฟล์ .job file ตั้งอยู่และเลือก fileตำแหน่งเริ่มต้นคือ: \rtg4_dg0703_df\งานการเขียนโปรแกรม
- ตำแหน่งโครงการงาน FlashPro Express: คลิกเรียกดูและนำทางไปยังตำแหน่งโครงการ FlashPro Express ที่ต้องการ

- คลิกตกลง การเขียนโปรแกรมที่จำเป็น file ถูกเลือกและพร้อมที่จะตั้งโปรแกรมในเครื่อง
- หน้าต่าง FlashPro Express จะปรากฏขึ้น โปรดยืนยันว่ามีหมายเลขโปรแกรมเมอร์ปรากฏในช่องโปรแกรมเมอร์ หากไม่มี ให้ยืนยันการเชื่อมต่อบอร์ดและคลิกรีเฟรช/สแกนโปรแกรมเมอร์อีกครั้ง
- คลิกเรียกใช้ เมื่อตั้งโปรแกรมอุปกรณ์สำเร็จ สถานะ RUN PASSED จะแสดงดังรูปต่อไปนี้

- ปิด FlashPro Express หรือคลิกออกในแท็บโครงการ
การรันสคริปต์ TCL
สคริปต์ TCL มีให้ในการออกแบบ files โฟลเดอร์ภายใต้ไดเร็กทอรี TCL_Scripts หากจำเป็น การออกแบบ
สามารถทำซ้ำการไหลได้ตั้งแต่การออกแบบ การดำเนินการ จนถึงการสร้างงาน file.
หากต้องการเรียกใช้ TCL ให้ทำตามขั้นตอนด้านล่างนี้:
- เปิดซอฟต์แวร์ Libero
- เลือกโครงการ > รันสคริปต์….
- คลิกเรียกดูและเลือก script.tcl จากไดเร็กทอรี TCL_Scripts ที่ดาวน์โหลด
- คลิกเรียกใช้
หลังจากที่ดำเนินการสคริปต์ TCL สำเร็จแล้ว โปรเจ็กต์ Libero จะถูกสร้างขึ้นภายในไดเร็กทอรี TCL_Scripts
สำหรับข้อมูลเพิ่มเติมเกี่ยวกับสคริปต์ TCL โปรดดูที่ rtg4_dg0703_df/TCL_Scripts/readme.txt
ดูรายละเอียดเพิ่มเติมเกี่ยวกับคำสั่ง TCL ได้จากคู่มืออ้างอิงคำสั่ง Libero® SoC TCL ติดต่อฝ่ายสนับสนุนด้านเทคนิคหากพบข้อสงสัยใด ๆ เมื่อเรียกใช้สคริปต์ TCL
Microsemi ไม่รับประกัน รับรอง หรือรับประกันเกี่ยวกับข้อมูลที่มีอยู่ในที่นี้ หรือความเหมาะสมของผลิตภัณฑ์และบริการสำหรับวัตถุประสงค์เฉพาะใดๆ และ Microsemi จะไม่รับผิดใด ๆ ที่เกิดขึ้นจากการใช้งานหรือการใช้ผลิตภัณฑ์หรือวงจรใดๆ ผลิตภัณฑ์ที่จำหน่ายในที่นี้และผลิตภัณฑ์อื่นๆ ที่จำหน่ายโดย Microsemi ได้รับการทดสอบอย่างจำกัด และไม่ควรใช้ร่วมกับอุปกรณ์หรือการใช้งานที่มีความสำคัญต่อภารกิจ ข้อมูลจำเพาะด้านประสิทธิภาพใด ๆ ที่เชื่อว่าเชื่อถือได้แต่ไม่ได้รับการตรวจสอบ และผู้ซื้อต้องดำเนินการและดำเนินการตามประสิทธิภาพและการทดสอบผลิตภัณฑ์อื่นๆ ทั้งหมด เพียงอย่างเดียวและร่วมกับหรือติดตั้งในผลิตภัณฑ์ขั้นสุดท้ายใดๆ ผู้ซื้อจะไม่พึ่งพาข้อมูลและประสิทธิภาพการทำงานหรือพารามิเตอร์ใด ๆ ที่ Microsemi ให้มา เป็นความรับผิดชอบของผู้ซื้อในการพิจารณาความเหมาะสมของผลิตภัณฑ์ใดๆ อย่างอิสระ และเพื่อทดสอบและตรวจสอบสิ่งเดียวกัน ข้อมูลที่ Microsemi ให้ไว้ด้านล่างนี้มีให้ "ตามที่เป็นอยู่" และมีข้อบกพร่องทั้งหมด และความเสี่ยงทั้งหมดที่เกี่ยวข้องกับข้อมูลดังกล่าวตกอยู่ที่ผู้ซื้อทั้งหมด Microsemi ไม่ให้สิทธิ์ในสิทธิบัตร ใบอนุญาต หรือสิทธิ์ในทรัพย์สินทางปัญญาอื่นใดแก่ฝ่ายใด ไม่ว่าโดยชัดแจ้งหรือโดยปริยาย ไม่ว่าจะเกี่ยวกับข้อมูลดังกล่าวเองหรือสิ่งใด ๆ ที่อธิบายโดยข้อมูลดังกล่าว ข้อมูลที่ให้ไว้ในเอกสารนี้เป็นกรรมสิทธิ์ของ Microsemi และ Microsemi ขอสงวนสิทธิ์ในการเปลี่ยนแปลงข้อมูลในเอกสารนี้หรือผลิตภัณฑ์และบริการใดๆ ได้ตลอดเวลาโดยไม่ต้องแจ้งให้ทราบ
เกี่ยวกับ Microsemi Microsemi ซึ่งเป็นบริษัทในเครือของ Microchip Technology Inc. (Nasdaq: MCHP) นำเสนอผลิตภัณฑ์เซมิคอนดักเตอร์และระบบโซลูชันที่ครอบคลุมสำหรับอุตสาหกรรมการบินและอวกาศ การป้องกันประเทศ การสื่อสาร ศูนย์ข้อมูล และตลาดอุตสาหกรรม ผลิตภัณฑ์ได้แก่ วงจรรวมสัญญาณผสมแอนะล็อกประสิทธิภาพสูงและทนต่อรังสี FPGA, SoC และ ASIC ผลิตภัณฑ์การจัดการพลังงาน อุปกรณ์จับเวลาและการซิงโครไนซ์ และโซลูชันเวลาที่แม่นยำ ซึ่งกำหนดมาตรฐานเวลาของโลก อุปกรณ์ประมวลผลเสียง โซลูชัน RF ส่วนประกอบแยกส่วน โซลูชันการจัดเก็บข้อมูลและการสื่อสารสำหรับองค์กร เทคโนโลยีความปลอดภัย และซอฟต์แวร์ป้องกันที่ปรับขนาดได้ampเอ้อผลิตภัณฑ์; โซลูชั่นอีเทอร์เน็ต Power-over-Ethernet ICs และมิดสแปน; ตลอดจนความสามารถในการออกแบบและบริการที่กำหนดเอง เรียนรู้เพิ่มเติมที่ www.microsemi.com.
สำนักงานใหญ่ไมโครเซมิ
One Enterprise, อลิโซ วีโจ,
CA 92656 สหรัฐอเมริกา
ภายในสหรัฐอเมริกา: +1 800-713-4113
นอกสหรัฐอเมริกา: +1 949-380-6100
ยอดขาย: +1 949-380-6136
แฟกซ์: +1 949-215-4996
อีเมล์:ฝ่ายขาย.support@microsemi.com
www.microsemi.com
© 2021 Microsemi ซึ่งเป็นบริษัทในเครือของ Microchip Technology Inc. สงวนลิขสิทธิ์ Microsemi และโลโก้ Microsemi เป็นเครื่องหมายการค้าจดทะเบียนของ Microsemi Corporation เครื่องหมายการค้าและเครื่องหมายบริการอื่นๆ ทั้งหมดเป็นทรัพย์สินของเจ้าของที่เกี่ยวข้อง
Microsemi ที่เป็นกรรมสิทธิ์ DG0703 Revision 4.0
เอกสาร / แหล่งข้อมูล
 |
การตรวจจับและแก้ไขข้อผิดพลาดของ MICROCHIP บนหน่วยความจำ RTG4 LSRAM [พีดีเอฟ] คู่มือการใช้งาน DG0703 Demo การตรวจจับและแก้ไขข้อผิดพลาดบนหน่วยความจำ RTG4 LSRAM การตรวจจับและการแก้ไขบนหน่วยความจำ RTG4 LSRAM หน่วยความจำ RTG4 LSRAM หน่วยความจำ LSRAM |



