![]()
ການກວດຫາຄວາມຜິດພາດ MICROCHIP ແລະການແກ້ໄຂໃນຫນ່ວຍຄວາມຈໍາ RTG4 LSRAM

ປະຫວັດການແກ້ໄຂ
ປະຫວັດການດັດແກ້ອະທິບາຍການປ່ຽນແປງທີ່ໄດ້ປະຕິບັດໃນເອກະສານ. ການປ່ຽນແປງແມ່ນໄດ້ລະບຸໄວ້ໂດຍການປັບປຸງ, ເລີ່ມຕົ້ນຈາກການພິມເຜີຍແຜ່ໃນປັດຈຸບັນຫຼາຍທີ່ສຸດ.
ການທົບທວນ 4.0
ຕໍ່ໄປນີ້ແມ່ນສະຫຼຸບສັງລວມຂອງການປ່ຽນແປງທີ່ເຮັດໄດ້ໃນການແກ້ໄຂນີ້.
- ອັບເດດເອກະສານສໍາລັບ Libero SoC v2021.2.
- ເພີ່ມເອກະສານຊ້ອນທ້າຍ 1: ການຂຽນໂປຣແກຣມອຸປະກອນໂດຍໃຊ້ FlashPro Express, ໜ້າ 14.
- ເພີ່ມເອກະສານຊ້ອນທ້າຍ 2: ແລ່ນ TCL Script, ໜ້າ 16.
- ລຶບການອ້າງອີງເຖິງຕົວເລກເວີຊັນ Libero ອອກແລ້ວ.
ການທົບທວນ 3.0
ອັບເດດເອກະສານສໍາລັບການປ່ອຍຊອບແວ Libero v11.9 SP1.
ການທົບທວນ 2.0
ອັບເດດເອກະສານສໍາລັບການປ່ອຍຊອບແວ Libero v11.8 SP2.
ການທົບທວນ 1.0
ການພິມເຜີຍແຜ່ຄັ້ງທໍາອິດຂອງເອກະສານນີ້.
ການກວດຫາຂໍ້ຜິດພາດ ແລະການແກ້ໄຂໃນ RTG4 LSRAM Memory
ການອອກແບບການອ້າງອິງນີ້ອະທິບາຍເຖິງຄວາມສາມາດກວດຫາຄວາມຜິດພາດ ແລະການແກ້ໄຂ (EDAC) ຂອງ RTG4™ FPGA LSRAMs. ໃນສະພາບແວດລ້ອມທີ່ມີຄວາມສ່ຽງຕໍ່ການເກີດເຫດການດຽວ (SEU), RAM ມັກຈະເກີດຄວາມຜິດພາດຊົ່ວຄາວທີ່ເກີດຈາກ ions ຫນັກ. ຄວາມຜິດພາດເຫຼົ່ານີ້ສາມາດກວດພົບ ແລະແກ້ໄຂໄດ້ໂດຍການໃຊ້ລະຫັດແກ້ໄຂຂໍ້ຜິດພາດ (ECCs). ຕັນ RTG4 FPGA RAM ມີຕົວຄວບຄຸມ EDAC ໃນຕົວເພື່ອສ້າງລະຫັດການແກ້ໄຂຂໍ້ຜິດພາດສໍາລັບການແກ້ໄຂຂໍ້ຜິດພາດ 1 ບິດຫຼືກວດພົບຂໍ້ຜິດພາດ 2 ບິດ.
ຖ້າກວດພົບຂໍ້ຜິດພາດ 1-ບິດ, ຕົວຄວບຄຸມ EDAC ຈະແກ້ໄຂບິດຂໍ້ຜິດພາດ ແລະຕັ້ງທຸງການແກ້ໄຂຂໍ້ຜິດພາດ (SB_CORRECT) ເປັນທີ່ສູງ. ຖ້າກວດພົບຂໍ້ຜິດພາດ 2-ບິດ, ຕົວຄວບຄຸມ EDAC ຈະຕັ້ງທຸງການກວດຫາຂໍ້ຜິດພາດ (DB_DETECT) ເປັນທີ່ສູງ.
ສໍາລັບຂໍ້ມູນເພີ່ມເຕີມກ່ຽວກັບການເຮັດວຽກຂອງ RTG4 LSRAM EDAC, ເບິ່ງ UG0574: RTG4 FPGA Fabric
ຄູ່ມືຜູ້ໃຊ້.
ໃນການອອກແບບການອ້າງອິງນີ້, ຄວາມຜິດພາດ 1-bit ຫຼືຄວາມຜິດພາດ 2-bit ໄດ້ຖືກນໍາສະເຫນີໂດຍຜ່ານ SmartDebug GUI. EDAC ໄດ້ຖືກສັງເກດເຫັນໂດຍໃຊ້ການໂຕ້ຕອບຜູ້ໃຊ້ແບບກາຟິກ (GUI), ນໍາໃຊ້ການໂຕ້ຕອບ UART ເພື່ອເຂົ້າເຖິງ LSRAM ສໍາລັບການອ່ານ / ຂຽນຂໍ້ມູນ, Libero® System-on-Chip (SoC) SmartDebug (J.TAG) ຖືກນໍາໃຊ້ເພື່ອສີດຄວາມຜິດພາດເຂົ້າໄປໃນຫນ່ວຍຄວາມຈໍາ LSRAM.
ຄວາມຕ້ອງການອອກແບບ
ຕາຕະລາງ 1 ລາຍຊື່ຄວາມຕ້ອງການການອອກແບບອ້າງອີງສໍາລັບການດໍາເນີນການສາທິດ RTG4 LSRAM EDAC.
ຕາຕະລາງ 1 • ຄວາມຕ້ອງການອອກແບບ

ຊອບແວ
- Libero SoC
- FlashPro Express
- SmartDebug
- ໂຮດໄດເວີ PC ໄດເວີ USB ຫາ UART
ໝາຍເຫດ: Libero SmartDesign ແລະຮູບໜ້າຈໍການຕັ້ງຄ່າທີ່ສະແດງຢູ່ໃນຄູ່ມືນີ້ແມ່ນເພື່ອຈຸດປະສົງຕົວຢ່າງເທົ່ານັ້ນ.
ເປີດການອອກແບບ Libero ເພື່ອເບິ່ງການອັບເດດຫຼ້າສຸດ.
ເງື່ອນໄຂເບື້ອງຕົ້ນ
ກ່ອນທີ່ທ່ານຈະເລີ່ມຕົ້ນ:
ດາວໂຫລດແລະຕິດຕັ້ງ Libero SoC (ຕາມທີ່ລະບຸໄວ້ໃນ website ສໍາລັບການອອກແບບນີ້) ໃນ host PC ຈາກສະຖານທີ່ດັ່ງຕໍ່ໄປນີ້: https://www.microsemi.com/product-directory/design-resources/1750-libero-soc
ການອອກແບບຕົວຢ່າງ
ດາວໂຫລດການອອກແບບຕົວຢ່າງ files ຈາກ Microsemi webເວັບໄຊຢູ່: http://soc.microsemi.com/download/rsc/?f=rtg4_dg0703_df
ການອອກແບບຕົວຢ່າງ files ປະກອບມີ:
- ໂຄງການ Libero SoC
- ຕົວຕິດຕັ້ງ GUI
- ການຂຽນໂປລແກລມ files
- Readme.txt file
- TCL_Scripts
ແອັບພລິເຄຊັນ GUI ໃນໂຮດ PC ອອກຄໍາສັ່ງໃຫ້ອຸປະກອນ RTG4 ຜ່ານການໂຕ້ຕອບ USB-UART. ການໂຕ້ຕອບ UART ນີ້ຖືກອອກແບບມາດ້ວຍ CoreUART, ເຊິ່ງເປັນ IP ທາງດ້ານເຫດຜົນຈາກລາຍການ Libero SoC IP. CoreUART IP ໃນຜ້າ RTG4 ໄດ້ຮັບຄໍາສັ່ງແລະສົ່ງພວກມັນໄປສູ່ເຫດຜົນຂອງຕົວຖອດລະຫັດຄໍາສັ່ງ. ເຫດຜົນຂອງຕົວຖອດລະຫັດຄໍາສັ່ງຖອດລະຫັດຄໍາສັ່ງອ່ານຫຼືຂຽນ, ເຊິ່ງຖືກປະຕິບັດໂດຍໃຊ້ເຫດຜົນໃນການໂຕ້ຕອບຫນ່ວຍຄວາມຈໍາ.
ບລັອກອິນເຕີເຟດໜ່ວຍຄວາມຈຳແມ່ນໃຊ້ເພື່ອອ່ານ/ຂຽນ ແລະຕິດຕາມທຸງຄວາມຜິດພາດ LSRAM. EDAC ໃນຕົວແກ້ໄຂຂໍ້ຜິດພາດ 1-bit ໃນຂະນະທີ່ອ່ານຈາກ LSRAM ແລະໃຫ້ຂໍ້ມູນທີ່ຖືກແກ້ໄຂໃຫ້ກັບສ່ວນຕິດຕໍ່ຜູ້ໃຊ້ແຕ່ບໍ່ໄດ້ຂຽນຂໍ້ມູນທີ່ຖືກແກ້ໄຂກັບຄືນໄປບ່ອນ LSRAM. LSRAM EDAC ທີ່ມີໃນຕົວບໍ່ໄດ້ປະຕິບັດຄຸນສົມບັດການຂັດ. ການອອກແບບຕົວຢ່າງປະຕິບັດເຫດຜົນ scrub, ເຊິ່ງຕິດຕາມທຸງການແກ້ໄຂ 1-bit ແລະປັບປຸງ LSRAM ດ້ວຍຂໍ້ມູນທີ່ຖືກແກ້ໄຂຖ້າມີຂໍ້ຜິດພາດເລັກນ້ອຍເກີດຂື້ນ.
SmartDebug GUI ຖືກນໍາໃຊ້ເພື່ອສີດຂໍ້ຜິດພາດ 1-bit ຫຼື 2-bit ເຂົ້າໄປໃນຂໍ້ມູນ LSRAM.
ຮູບທີ 1 ສະແດງແຜນຜັງບລັອກລະດັບສູງສຸດຂອງການອອກແບບຕົວຢ່າງ RTG4 LSRAM EDAC.
ຮູບທີ 1 • ແຜນວາດບລັອກລະດັບສູງສຸດ
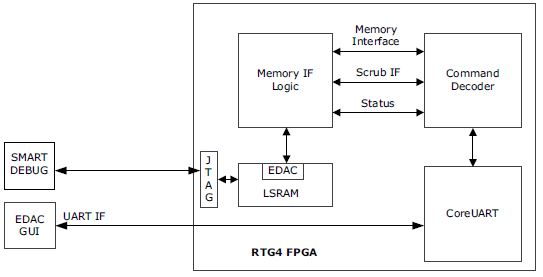
ຕໍ່ໄປນີ້ແມ່ນການຕັ້ງຄ່າການອອກແບບຕົວຢ່າງ:
- LSRAM ໄດ້ຖືກຕັ້ງຄ່າສໍາລັບໂຫມດ ×18 ແລະ EDAC ຖືກເປີດໃຊ້ໂດຍການເຊື່ອມຕໍ່ສັນຍານ LSRAMs ECC_EN ກັບສູງ.
ໝາຍເຫດ: LSRAM EDAC ຮອງຮັບພຽງແຕ່ໂໝດ×18 ແລະ×36 ເທົ່ານັ້ນ. - CoreUART IP ໄດ້ຖືກຕັ້ງຄ່າເພື່ອຕິດຕໍ່ສື່ສານກັບຄໍາຮ້ອງສະຫມັກ PC ເຈົ້າພາບໃນອັດຕາ 115200 baud.
- RTG4FCCCECALIB_C0 ຖືກຕັ້ງຄ່າໃຫ້ໂມງ CoreUART ແລະເຫດຜົນຂອງຜ້າອື່ນໆຢູ່ທີ່ 80 MHz.
ຄຸນສົມບັດ
ຕໍ່ໄປນີ້ແມ່ນລັກສະນະການອອກແບບຕົວຢ່າງ:
- ອ່ານ ແລະຂຽນໃສ່ LSRAM
- ໃສ່ຂໍ້ຜິດພາດ 1-bit ແລະ 2-bit ໂດຍໃຊ້ SmartDebug
- ສະແດງຄ່າການນັບຄວາມຜິດພາດ 1-ບິດ ແລະ 2-ບິດ
- ການຈັດຫາເພື່ອລຶບລ້າງຄ່າການນັບຄວາມຜິດພາດ
- ເປີດໃຊ້ ຫຼືປິດການນຳໃຊ້ເຫດຜົນການຂັດຄວາມຈຳ
ລາຍລະອຽດ
ການອອກແບບຕົວຢ່າງນີ້ກ່ຽວຂ້ອງກັບການຈັດຕັ້ງປະຕິບັດວຽກງານຕໍ່ໄປນີ້:
- ການເລີ່ມຕົ້ນ ແລະການເຂົ້າເຖິງ LSRAM
ເຫດຜົນໃນການໂຕ້ຕອບຂອງຫນ່ວຍຄວາມຈໍາທີ່ປະຕິບັດຢູ່ໃນເຫດຜົນ fabric ໄດ້ຮັບຄໍາສັ່ງເລີ່ມຕົ້ນຈາກ GUI ແລະເລີ່ມຕົ້ນສະຖານທີ່ຫນ່ວຍຄວາມຈໍາ 256 ທໍາອິດຂອງ LSRAM ດ້ວຍຂໍ້ມູນເພີ່ມຂຶ້ນ. ມັນຍັງປະຕິບັດການອ່ານແລະຂຽນເຖິງ 256 ສະຖານທີ່ຫນ່ວຍຄວາມຈໍາຂອງ LSRAM ໂດຍການຮັບທີ່ຢູ່ແລະຂໍ້ມູນຈາກ GUI. ສໍາລັບການປະຕິບັດການອ່ານ, ການອອກແບບດຶງຂໍ້ມູນຈາກ LSRAM ແລະສະຫນອງມັນໃຫ້ກັບ GUI ສໍາລັບການສະແດງ. ຄວາມຄາດຫວັງແມ່ນວ່າການອອກແບບຈະບໍ່ເຮັດໃຫ້ເກີດຄວາມຜິດພາດກ່ອນທີ່ຈະໃຊ້ SmartDebug.
ໝາຍເຫດ: ສະຖານທີ່ຫນ່ວຍຄວາມຈໍາທີ່ບໍ່ໄດ້ກໍານົດໄວ້ອາດຈະມີມູນຄ່າແບບສຸ່ມ, ແລະ SmartDebug ອາດຈະສະແດງຄວາມຜິດພາດພຽງບິດດຽວຫຼືສອງບິດໃນສະຖານທີ່ເຫຼົ່ານັ້ນ.
- ການໃສ່ 1-bit ຫຼື 2-bit ຜິດພາດ
SmartDebug GUI ຖືກນໍາໃຊ້ເພື່ອສີດຂໍ້ຜິດພາດ 1 bit ຫຼື 2-bit ເຂົ້າໄປໃນສະຖານທີ່ຫນ່ວຍຄວາມຈໍາທີ່ລະບຸໄວ້ຂອງ LSRAM. ການດໍາເນີນງານຕໍ່ໄປນີ້ແມ່ນດໍາເນີນການໂດຍໃຊ້ SmartDebug ເພື່ອສີດຂໍ້ຜິດພາດ 1-bit ແລະ 2-bit ກັບ LSRAM:- ເປີດ SmartDebug GUI, ຄລິກ Debug FPGA Array.
- ໄປທີ່ແຖບ Memory Blocks, ເລືອກຕົວຢ່າງຄວາມຊົງຈໍາ, ແລະຄລິກຂວາໃສ່ Add.
- ເພື່ອອ່ານບລັອກຄວາມຊົງຈໍາ, ຄລິກອ່ານບລັອກ.
- ໃສ່ຄວາມຜິດພາດພຽງບິດດຽວ ຫຼືສອງບິດໃສ່ບ່ອນໃດນຶ່ງຂອງ LSRAM ຂອງຄວາມເລິກທີ່ແນ່ນອນ.
- ເພື່ອຂຽນໄປທີ່ສະຖານທີ່ດັດແກ້, ຄລິກຂຽນບລັອກ.
ໃນລະຫວ່າງການປະຕິບັດງານ LSRAM ອ່ານແລະຂຽນຜ່ານ SmartDebug (JTAG) ການໂຕ້ຕອບ, ຕົວຄວບຄຸມ EDAC ແມ່ນ bypassed ແລະບໍ່ໄດ້ຄິດໄລ່ບິດ ECC ສໍາລັບການດໍາເນີນງານການຂຽນໃນຂັ້ນຕອນ e.
- ການນັບຄວາມຜິດພາດ
ຕົວນັບ 8-bit ຖືກນໍາໃຊ້ເພື່ອສະຫນອງການນັບຄວາມຜິດພາດແລະຖືກອອກແບບເຂົ້າໄປໃນເຫດຜົນ fabric ເພື່ອນັບຄວາມຜິດພາດ 1-bit ຫຼື 2-bit. ເຫດຜົນຂອງຕົວຖອດລະຫັດຄໍາສັ່ງໃຫ້ຄ່າການນັບໃຫ້ກັບ GUI ເມື່ອໄດ້ຮັບຄໍາສັ່ງຈາກ GUI.
ໂຄງສ້າງໂມງ
ໃນການອອກແບບຕົວຢ່າງນີ້, ມີໂດເມນຫນຶ່ງໂມງ. oscillator 50 MHz ພາຍໃນຂັບເຄື່ອນ RTG4FCCC, ເຊິ່ງຂັບຕໍ່ໄປ RTG4FCCCECALIB_C0. RTG4FCCCECALIB_C0 ສ້າງໂມງ 80 MHz ທີ່ສະໜອງແຫຼ່ງໂມງໃຫ້ກັບໂມດູນ COREUART, cmd_decoder, TPSRAM_ECC, ແລະ RAM_RW.
ຕົວເລກຕໍ່ໄປນີ້ສະແດງໃຫ້ເຫັນໂຄງສ້າງໂມງຂອງການອອກແບບຕົວຢ່າງ.
ຮູບທີ 2 • ໂຄງສ້າງໂມງ

ປັບໂຄງສ້າງ
ໃນການອອກແບບຕົວຢ່າງນີ້, ສັນຍານການຣີເຊັດເປັນໂມດູນ COREUART, cmd_decoder, ແລະ RAM_RW ແມ່ນສະໜອງໃຫ້ຜ່ານພອດ LOCK ຂອງ RTG4FCCCECALIB_C0. ຕົວເລກຕໍ່ໄປນີ້ສະແດງໃຫ້ເຫັນໂຄງສ້າງການປັບໃຫມ່ຂອງການອອກແບບຕົວຢ່າງ.
ຮູບທີ 3 • ຕັ້ງຄ່າໂຄງສ້າງຄືນໃໝ່

ການຕັ້ງຄ່າ Demo Design
ພາກສ່ວນຕໍ່ໄປນີ້ອະທິບາຍວິທີການຕັ້ງຄ່າຊຸດພັດທະນາ RTG4 ແລະ GUI ເພື່ອດໍາເນີນການອອກແບບຕົວຢ່າງ.
ການຕັ້ງຄ່າ Jumper
- ເຊື່ອມຕໍ່ jumpers ໃນຊຸດພັດທະນາ RTG4, ດັ່ງທີ່ສະແດງຢູ່ໃນຕາຕະລາງ 2.
ຕາຕະລາງ 2 • ການຕັ້ງຄ່າ JumperJumper ປັກໝຸດ (ຈາກ) ປັກໝຸດ (ເຖິງ) ຄຳເຫັນ J11, J17, J19, J21, J23, J26, J27, J28 1 2 ຄ່າເລີ່ມຕົ້ນ J16 2 3 ຄ່າເລີ່ມຕົ້ນ J32 1 2 ຄ່າເລີ່ມຕົ້ນ J33 1 3 ຄ່າເລີ່ມຕົ້ນ 2 4 ໝາຍເຫດ: ປິດສະວິດການສະຫນອງພະລັງງານ, SW6, ໃນຂະນະທີ່ເຊື່ອມຕໍ່ jumpers ໄດ້.
- ເຊື່ອມຕໍ່ສາຍ USB (mini USB to Type-A USB cable) ກັບ J47 ຂອງຊຸດພັດທະນາ RTG4 ແລະປາຍສາຍອື່ນໆກັບພອດ USB ຂອງໂຮດ PC.
- ໃຫ້ແນ່ໃຈວ່າໄດເວີຂົວ USB ຫາ UART ຖືກກວດພົບໂດຍອັດຕະໂນມັດ. ນີ້ສາມາດກວດສອບໄດ້ໃນຜູ້ຈັດການອຸປະກອນຂອງໂຮດ PC.
ຮູບທີ 4 ສະແດງໃຫ້ເຫັນຄຸນສົມບັດພອດ serial USB 2.0 ແລະ COM31 ແລະ USB serial converter C ທີ່ເຊື່ອມຕໍ່.
ຮູບທີ 4 • USB to UART Bridge Drivers

ໝາຍເຫດ: ຖ້າໄດເວີຂົວ USB ຫາ UART ບໍ່ໄດ້ຖືກຕິດຕັ້ງ, ດາວໂຫລດແລະຕິດຕັ້ງໄດເວີຈາກ www.microsemi.com//documents/CDM_2.08.24_WHQL_Certified.zip
ຮູບທີ 5 ສະແດງໃຫ້ເຫັນການຕັ້ງຄ່າກະດານສໍາລັບການດໍາເນີນການສາທິດ EDAC ໃນຊຸດການພັດທະນາ RTG4.

ການຂຽນໂປລແກລມ Demo Design
- ເປີດຕົວຊອບແວ Libero SOC.
- ເພື່ອດໍາເນີນໂຄງການຊຸດການພັດທະນາ RTG4 ກັບວຽກ file ສະຫນອງໃຫ້ເປັນສ່ວນຫນຶ່ງຂອງການອອກແບບ files ການນໍາໃຊ້ຊອບແວ FlashPro Express, ເບິ່ງເອກະສານຊ້ອນ 1: ການດໍາເນີນໂຄງການອຸປະກອນການນໍາໃຊ້ FlashPro Express, ຫນ້າ 14.
ໝາຍເຫດ: ເມື່ອການຂຽນໂປລແກລມຖືກເຮັດດ້ວຍວຽກ file ໂດຍຜ່ານຊອບແວ FlashPro Express, ດໍາເນີນການກັບ EDAC Demo GUI, ຫນ້າ 9. ຖ້າບໍ່ດັ່ງນັ້ນ, ດໍາເນີນການຂັ້ນຕອນຕໍ່ໄປ. - ໃນການໄຫຼອອກແບບ Libero, ໃຫ້ຄລິກໃສ່ການດໍາເນີນງານໂຄງການດໍາເນີນງານ.
- ເມື່ອການຂຽນໂປລແກລມສໍາເລັດ, ໝາຍຕິກສີຂຽວຈະປາກົດຢູ່ທາງຫນ້າຂອງ 'Run Program action' ທີ່ຊີ້ບອກການດໍາເນີນໂຄງການທີ່ປະສົບຜົນສໍາເລັດຂອງການອອກແບບຕົວຢ່າງ.

EDAC Demo GUI
ການສາທິດ EDAC ແມ່ນສະໜອງໃຫ້ດ້ວຍ GUI ທີ່ເປັນມິດກັບຜູ້ໃຊ້, ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບທີ 7, ທີ່ເຮັດວຽກຢູ່ໃນໂຮດ PC, ເຊິ່ງສື່ສານກັບຊຸດພັດທະນາ RTG4. UART ຖືກນໍາໃຊ້ເປັນໂປໂຕຄອນການສື່ສານພື້ນຖານລະຫວ່າງ host PC ແລະ RTG4 Development Kit.

GUI ມີພາກສ່ວນດັ່ງຕໍ່ໄປນີ້:
- ການຄັດເລືອກພອດ COM ເພື່ອສ້າງການເຊື່ອມຕໍ່ UART ກັບ RTG4 FPGA ດ້ວຍອັດຕາ 115200 baud.
- LSRAM Memory ຂຽນ: ເພື່ອຂຽນຂໍ້ມູນ 8-bit ໄປຫາທີ່ຢູ່ຫນ່ວຍຄວາມຈໍາ LSRAM ທີ່ລະບຸ.
- Memory Scrubbing: ເພື່ອເປີດໃຊ້ ຫຼືປິດການນຳໃຊ້ເຫດຜົນການຂັດ.
- LSRAM Memory ອ່ານ: ເພື່ອອ່ານຂໍ້ມູນ 8-bit ຈາກທີ່ຢູ່ຫນ່ວຍຄວາມຈໍາ LSRAM ທີ່ລະບຸ.
- ຈຳນວນຂໍ້ຜິດພາດ: ສະແດງຈຳນວນຄວາມຜິດພາດ ແລະໃຫ້ທາງເລືອກໃນການລຶບຄ່ານັບເປັນສູນ.
- ຈຳນວນຂໍ້ຜິດພາດ 1-ບິດ: ສະແດງຈຳນວນຄວາມຜິດພາດ 1-ບິດ ແລະໃຫ້ທາງເລືອກໃນການລຶບຄ່ານັບເປັນສູນ.
- ຈຳນວນຂໍ້ຜິດພາດ 2-ບິດ: ສະແດງຈຳນວນຄວາມຜິດພາດ 2-ບິດ ແລະໃຫ້ທາງເລືອກໃນການລຶບຄ່ານັບເປັນສູນ.
- ຂໍ້ມູນບັນທຶກ: ໃຫ້ຂໍ້ມູນສະຖານະພາບສໍາລັບການດໍາເນີນງານທຸກປະຕິບັດການນໍາໃຊ້ GUI.
ແລ່ນ Demo
ຂັ້ນຕອນຕໍ່ໄປນີ້ອະທິບາຍວິທີການດໍາເນີນການສາທິດ:
- ໄປທີ່ \v1.2.2\v1.2.2\Exe ແລະຄລິກສອງຄັ້ງ EDAC_GUI.exe ດັ່ງທີ່ສະແດງໃນຮູບ 8.
- ເລືອກພອດ COM31 ຈາກລາຍການ ແລະຄລິກເຊື່ອມຕໍ່.

ການສີດແລະການແກ້ໄຂຄວາມຜິດພາດເລັກນ້ອຍ
- ໃນການອອກແບບ Libero ທີ່ສະຫນອງໃຫ້, double-click on the SmartDebug Design in the design flow.
- ໃນ SmartDebug GUI, ຄລິກ Debug FPGA Array.

- ຢູ່ໃນປ່ອງຢ້ຽມ Debug FPGA Array, ໄປທີ່ແຖບ Memory Blocks. ມັນຈະສະແດງຕັນ LSRAM ໃນການອອກແບບດ້ວຍເຫດຜົນແລະທາງດ້ານຮ່າງກາຍ view. ທ່ອນໄມ້ຕາມເຫດຜົນແມ່ນສະແດງດ້ວຍໄອຄອນ L, ແລະຕັນທາງກາຍແມ່ນສະແດງດ້ວຍໄອຄອນ P.
- ເລືອກຕົວຢ່າງ block ຕົວຈິງແລ້ວຄລິກຂວາໃສ່ Add.

- ເພື່ອອ່ານບລັອກຄວາມຊົງຈໍາ, ຄລິກອ່ານບລັອກ.

- ໃສ່ຂໍ້ຜິດພາດ 1 ບິດໃນຂໍ້ມູນ 8 ບິດຢູ່ບ່ອນໃດກໍໄດ້ຂອງ LSRAM ເຖິງຄວາມເລິກ 256, ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບຕໍ່ໄປນີ້ບ່ອນທີ່ຄວາມຜິດພາດ 1 ບິດຖືກໃສ່ຢູ່ບ່ອນທີ 0 ຂອງ LSRAM.
- ກົດ Write Block ໃນຄໍາສັ່ງທີ່ຈະຂຽນຂໍ້ມູນດັດແກ້ກັບສະຖານທີ່ຕັ້ງໃຈ.

- ໄປທີ່ EDAC GUI ແລະໃສ່ຊ່ອງທີ່ຢູ່ໃນພາກສ່ວນ LSRAM Memory Read ແລະໃຫ້ຄລິກໃສ່ອ່ານ, ດັ່ງທີ່ສະແດງໃຫ້ເຫັນໃນຮູບຕໍ່ໄປນີ້.
- ສັງເກດ 1 Bit Error Count and Read Data in the GUI. ຄ່າການນັບຄວາມຜິດພາດເພີ່ມຂຶ້ນ 1.
ພາກສະຫນາມ Read Data ສະແດງຂໍ້ມູນທີ່ຖືກຕ້ອງຍ້ອນວ່າ EDAC ແກ້ໄຂຂໍ້ຜິດພາດ.
ໝາຍເຫດ: ຖ້າການຂັດຫນ່ວຍຄວາມຈໍາບໍ່ໄດ້ເປີດໃຊ້, ຫຼັງຈາກນັ້ນການນັບຄວາມຜິດພາດແມ່ນເພີ່ມຂຶ້ນສໍາລັບການອ່ານທຸກຄັ້ງຈາກທີ່ຢູ່ LSRAM ດຽວກັນຍ້ອນວ່າມັນເຮັດໃຫ້ເກີດຄວາມຜິດພາດ 1-bit.
ການສີດຄວາມຜິດພາດສອງເທື່ອ ແລະການກວດຫາ
- ປະຕິບັດຂັ້ນຕອນທີ 1 ເຖິງຂັ້ນຕອນທີ 5 ຕາມທີ່ໄດ້ລະບຸໄວ້ໃນການສີດແລະການແກ້ໄຂຂໍ້ຜິດພາດເລັກນ້ອຍ, ຫນ້າ 10.
- ໃສ່ຂໍ້ຜິດພາດ 2-bit ໃນຂໍ້ມູນ 8-bit ຢູ່ບ່ອນໃດກໍໄດ້ຂອງ LSRAM ເຖິງຄວາມເລິກ 256, ດັ່ງທີ່ສະແດງໃນຮູບຕໍ່ໄປນີ້ບ່ອນທີ່ຄວາມຜິດພາດ 2-bit ຖືກໃສ່ຢູ່ສະຖານທີ່ 'A' ຂອງ LSRAM.
- ກົດ Write Block ເພື່ອຂຽນຂໍ້ມູນທີ່ຖືກດັດແປງໃສ່ສະຖານທີ່ຕັ້ງໃຈ.

- ໄປທີ່ EDAC GUI ແລະໃສ່ຊ່ອງທີ່ຢູ່ໃນພາກສ່ວນ LSRAM Memory Read ແລະໃຫ້ຄລິກໃສ່ອ່ານ, ດັ່ງທີ່ສະແດງໃຫ້ເຫັນໃນຮູບຕໍ່ໄປນີ້.
- ສັງເກດການນັບຄວາມຜິດພາດ 2-ບິດ ແລະອ່ານຂໍ້ມູນໃນ GUI. ຄ່າການນັບຄວາມຜິດພາດເພີ່ມຂຶ້ນ 1.
ຊ່ອງອ່ານຂໍ້ມູນສະແດງຂໍ້ມູນເສຍຫາຍ.

ການປະຕິບັດທັງຫມົດທີ່ດໍາເນີນຢູ່ໃນ RTG4 ແມ່ນຖືກບັນທຶກຢູ່ໃນສ່ວນ Serial Console ຂອງ GUI.
ສະຫຼຸບ
ການສາທິດນີ້ຊີ້ໃຫ້ເຫັນຄວາມສາມາດຂອງ EDAC ຂອງຄວາມຊົງຈໍາ RTG4 LSRAM. ຄວາມຜິດພາດ 1-ບິດ ຫຼືຄວາມຜິດພາດ 2-ບິດແມ່ນໄດ້ນໍາສະເຫນີຜ່ານ SmartDebug GUI. ການແກ້ໄຂຄວາມຜິດພາດ 1-bit ແລະການກວດສອບຄວາມຜິດພາດ 2-bit ແມ່ນໄດ້ສັງເກດການນໍາໃຊ້ EDAC GUI.
ການຂຽນໂປລແກລມອຸປະກອນໂດຍໃຊ້ FlashPro Express
ພາກນີ້ອະທິບາຍວິທີການຂຽນໂປລແກລມອຸປະກອນ RTG4 ກັບວຽກການຂຽນໂປຼແກຼມ file ໃຊ້ FlashPro Express.
ເພື່ອຂຽນໂປຣແກຣມອຸປະກອນ, ປະຕິບັດຕາມຂັ້ນຕອນຕໍ່ໄປນີ້:
- ໃຫ້ແນ່ໃຈວ່າການຕັ້ງຄ່າ jumper ໃນກະດານແມ່ນຄືກັນກັບທີ່ລະບຸໄວ້ໃນຕາຕະລາງ 3 ຂອງ UG0617:
ຄູ່ມືຜູ້ໃຊ້ຊຸດພັດທະນາ RTG4. - ທາງເລືອກອື່ນ, jumper J32 ສາມາດຖືກຕັ້ງໃຫ້ເຊື່ອມຕໍ່ pins 2-3 ເມື່ອໃຊ້ FlashPro4, FlashPro5, ຫຼື FlashPro6 programmer ພາຍນອກແທນທີ່ຈະເປັນການຕັ້ງຄ່າ jumper ເລີ່ມຕົ້ນເພື່ອໃຊ້ FlashPro5 ຝັງໄວ້.
ໝາຍເຫດ: ສະວິດການສະຫນອງພະລັງງານ, SW6 ຕ້ອງຖືກປິດໃນຂະນະທີ່ເຮັດໃຫ້ການເຊື່ອມຕໍ່ jumper. - ເຊື່ອມຕໍ່ສາຍການສະຫນອງພະລັງງານກັບຕົວເຊື່ອມຕໍ່ J9 ໃນກະດານ.
- ເປີດໃຊ້ສະວິດການສະຫນອງພະລັງງານ SW6.
- ຖ້າໃຊ້ FlashPro5 ທີ່ຝັງໄວ້, ເຊື່ອມຕໍ່ສາຍ USB ກັບຕົວເຊື່ອມຕໍ່ J47 ແລະໂຮດ PC.
ອີກທາງເລືອກ, ຖ້າໃຊ້ໂປແກຣມພາຍນອກ, ເຊື່ອມຕໍ່ສາຍໂບກັບ JTAG header J22 ແລະເຊື່ອມຕໍ່ programmer ກັບ host PC. - ໃນຄອມພິວເຕີເຈົ້າພາບ, ເປີດຊອບແວ FlashPro Express.
- ກົດ New ຫຼືເລືອກ New Job Project ຈາກ FlashPro Express Job ຈາກເມນູ Project ເພື່ອສ້າງໂຄງການວຽກໃຫມ່, ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບຕໍ່ໄປນີ້.

- ໃສ່ສິ່ງຕໍ່ໄປນີ້ໃນໂຄງການວຽກໃໝ່ຈາກກ່ອງໂຕ້ຕອບວຽກ FlashPro Express:
- ວຽກຂຽນໂປລແກລມ file: ຄລິກ Browse, ແລະນໍາທາງໄປຫາສະຖານທີ່ບ່ອນທີ່ .job file ຕັ້ງຢູ່ແລະເລືອກເອົາ file. ສະຖານທີ່ເລີ່ມຕົ້ນແມ່ນ: \rtg4_dg0703_df\Programming_Job
- ສະຖານທີ່ໂຄງການວຽກ FlashPro Express: ກົດ Browse ແລະທ່ອງໄປຫາສະຖານທີ່ໂຄງການ FlashPro Express ທີ່ຕ້ອງການ.

- ກົດ OK. ການຂຽນໂປລແກລມທີ່ຕ້ອງການ file ຖືກເລືອກ ແລະພ້ອມທີ່ຈະຕັ້ງໂປຣແກຣມຢູ່ໃນອຸປະກອນ.
- ປ່ອງຢ້ຽມ FlashPro Express ຈະປາກົດ, ຢືນຢັນວ່າຕົວເລກຂອງໂປລແກລມຈະປາກົດຢູ່ໃນພາກສະຫນາມ Programmer. ຖ້າມັນບໍ່, ຢືນຢັນການເຊື່ອມຕໍ່ຂອງກະດານແລະຄລິກ ໂຫຼດຫນ້າຈໍຄືນ / Rescan Programmers.
- ກົດ RUN. ເມື່ອອຸປະກອນຖືກຕັ້ງໂຄງການສຳເລັດແລ້ວ, ສະຖານະ RUN PASSED ຈະສະແດງຂຶ້ນຕາມຮູບຕໍ່ໄປນີ້.

- ປິດ FlashPro Express ຫຼືຄລິກອອກໃນແຖບໂຄງການ.
ແລ່ນ TCL Script
ສະຄິບ TCL ແມ່ນສະຫນອງໃຫ້ໃນການອອກແບບ files ໂຟນເດີພາຍໃຕ້ໄດເລກະທໍລີ TCL_Scripts. ຖ້າຕ້ອງການ, ການອອກແບບ
ການໄຫຼເຂົ້າສາມາດຜະລິດຈາກການອອກແບບການປະຕິບັດຈົນກ່ວາການຜະລິດຂອງວຽກເຮັດງານທໍາ file.
ເພື່ອດໍາເນີນການ TCL, ປະຕິບັດຕາມຂັ້ນຕອນຂ້າງລຸ່ມນີ້:
- ເປີດຕົວຊອບແວ Libero
- ເລືອກ Project > Execute Script….
- ກົດ Browse ແລະເລືອກ script.tcl ຈາກໄດເລກະທໍລີ TCL_Scripts ດາວໂຫຼດ.
- ກົດ Run.
ຫຼັງຈາກການປະຕິບັດ TCL script ສົບຜົນສໍາເລັດ, ໂຄງການ Libero ໄດ້ຖືກສ້າງຕັ້ງຂື້ນຢູ່ພາຍໃນ TCL_Scripts directory.
ສໍາລັບຂໍ້ມູນເພີ່ມເຕີມກ່ຽວກັບສະຄຣິບ TCL, ເບິ່ງ rtg4_dg0703_df/TCL_Scripts/readme.txt.
ເບິ່ງຄູ່ມືອ້າງອີງຄໍາສັ່ງ Libero® SoC TCL ສໍາລັບລາຍລະອຽດເພີ່ມເຕີມກ່ຽວກັບຄໍາສັ່ງ TCL. ຕິດຕໍ່ຝ່າຍຊ່ວຍເຫຼືອດ້ານວິຊາການສໍາລັບການສອບຖາມໃດໆທີ່ພົບໃນເວລາທີ່ແລ່ນສະຄິບ TCL.
Microsemi ບໍ່ມີການຮັບປະກັນ, ການເປັນຕົວແທນ, ຫຼືການຮັບປະກັນກ່ຽວກັບຂໍ້ມູນທີ່ມີຢູ່ໃນນີ້ຫຼືຄວາມເຫມາະສົມຂອງຜະລິດຕະພັນແລະການບໍລິການຂອງມັນສໍາລັບຈຸດປະສົງສະເພາະໃດຫນຶ່ງ, ຫຼື Microsemi ບໍ່ຮັບຜິດຊອບໃດໆທີ່ເກີດຂື້ນຈາກຄໍາຮ້ອງສະຫມັກຫຼືການນໍາໃຊ້ຜະລິດຕະພັນຫຼືວົງຈອນໃດໆ. ຜະລິດຕະພັນທີ່ຂາຍຢູ່ລຸ່ມນີ້ ແລະ ຜະລິດຕະພັນອື່ນໆທີ່ຂາຍໂດຍ Microsemi ແມ່ນຂຶ້ນກັບການທົດສອບທີ່ຈຳກັດ ແລະ ບໍ່ຄວນໃຊ້ຮ່ວມກັບອຸປະກອນ ຫຼື ແອັບພລິເຄຊັນທີ່ສຳຄັນ. ຂໍ້ມູນຈໍາເພາະການປະຕິບັດແມ່ນເຊື່ອວ່າມີຄວາມຫນ້າເຊື່ອຖືແຕ່ບໍ່ໄດ້ຮັບການຢັ້ງຢືນ, ແລະຜູ້ຊື້ຕ້ອງດໍາເນີນການແລະສໍາເລັດການປະຕິບັດທັງຫມົດແລະການທົດສອບອື່ນໆຂອງຜະລິດຕະພັນ, ດຽວແລະຮ່ວມກັນ, ຫຼືຕິດຕັ້ງໃນ, ຜະລິດຕະພັນສຸດທ້າຍ. ຜູ້ຊື້ຈະຕ້ອງບໍ່ອີງໃສ່ຂໍ້ມູນ ແລະຂໍ້ກໍາຫນົດການປະຕິບັດ ຫຼືຕົວກໍານົດການທີ່ສະໜອງໃຫ້ໂດຍ Microsemi. ມັນເປັນຄວາມຮັບຜິດຊອບຂອງຜູ້ຊື້ໃນການກໍານົດຄວາມເຫມາະສົມຂອງຜະລິດຕະພັນໃດຫນຶ່ງຢ່າງເປັນເອກະລາດແລະການທົດສອບແລະການກວດສອບດຽວກັນ. ຂໍ້ມູນທີ່ສະຫນອງໃຫ້ໂດຍ Microsemi ໃນທີ່ນີ້ແມ່ນໄດ້ສະຫນອງໃຫ້ "ເປັນ, ບ່ອນທີ່ເປັນ" ແລະມີຄວາມຜິດພາດທັງຫມົດ, ແລະຄວາມສ່ຽງທັງຫມົດທີ່ກ່ຽວຂ້ອງກັບຂໍ້ມູນຂ່າວສານດັ່ງກ່າວແມ່ນທັງຫມົດຂອງຜູ້ຊື້. Microsemi ບໍ່ໄດ້ໃຫ້ສິດ, ຊັດເຈນ ຫຼື implicitly, ໃຫ້ຝ່າຍໃດຝ່າຍຫນຶ່ງສິດທິສິດທິບັດ, ໃບອະນຸຍາດ, ຫຼືສິດທິ IP ອື່ນໆ, ບໍ່ວ່າຈະກ່ຽວກັບຂໍ້ມູນດັ່ງກ່າວຂອງຕົນເອງຫຼືສິ່ງທີ່ອະທິບາຍໂດຍຂໍ້ມູນດັ່ງກ່າວ. ຂໍ້ມູນທີ່ສະໜອງໃຫ້ຢູ່ໃນເອກະສານນີ້ແມ່ນເປັນເຈົ້າຂອງຂອງ Microsemi, ແລະ Microsemi ສະຫງວນສິດທີ່ຈະປ່ຽນແປງຂໍ້ມູນໃນເອກະສານນີ້ ຫຼືຕໍ່ຜະລິດຕະພັນ ແລະການບໍລິການຕ່າງໆໄດ້ທຸກເວລາໂດຍບໍ່ຕ້ອງແຈ້ງໃຫ້ຮູ້.
ກ່ຽວກັບ Microsemi Microsemi, ບໍລິສັດຍ່ອຍທີ່ເປັນເຈົ້າຂອງທັງໝົດຂອງ Microchip Technology Inc. (Nasdaq: MCHP), ສະຫນອງການປະກອບເອກະສານຄົບຊຸດຂອງ semiconductor ແລະລະບົບການແກ້ໄຂສໍາລັບອາວະກາດ & ການປ້ອງກັນ, ການສື່ສານ, ສູນຂໍ້ມູນ ແລະຕະຫຼາດອຸດສາຫະກໍາ. ຜະລິດຕະພັນປະກອບມີວົງຈອນປະສົມປະສານສັນຍານອະນາລັອກທີ່ມີປະສິດທິພາບສູງແລະທົນທານຕໍ່ລັງສີ, FPGAs, SoCs ແລະ ASICs; ຜະລິດຕະພັນການຄຸ້ມຄອງພະລັງງານ; ອຸປະກອນກໍານົດເວລາແລະ synchronization ແລະການແກ້ໄຂທີ່ໃຊ້ເວລາທີ່ຊັດເຈນ, ກໍານົດມາດຕະຖານຂອງໂລກສໍາລັບເວລາ; ອຸປະກອນປະມວນຜົນສຽງ; ການແກ້ໄຂ RF; ອົງປະກອບແຍກ; ການເກັບຮັກສາວິສາຫະກິດແລະການແກ້ໄຂການສື່ສານ, ເຕັກໂນໂລຊີຄວາມປອດໄພແລະການຕ້ານການ t ຂະຫນາດamper ຜະລິດຕະພັນ; ການແກ້ໄຂອີເທີເນັດ; Power-over-Ethernet ICs ແລະ midspans; ເຊັ່ນດຽວກັນກັບຄວາມສາມາດໃນການອອກແບບແລະການບໍລິການທີ່ກໍາຫນົດເອງ. ສຶກສາເພີ່ມເຕີມໄດ້ທີ່ www.microsemi.com.
ສໍານັກງານໃຫຍ່ Microsemi
ບໍລິສັດໜຶ່ງ, Aliso Viejo,
CA 92656 ສະຫະລັດ
ພາຍໃນສະຫະລັດ: +1 800-713-4113
ຢູ່ນອກສະຫະລັດ: +1 949-380-6100
ການຂາຍ: +1 949-380-6136
ແຟັກ: +1 949-215-4996
ອີເມວ: ການຂາຍ.support@microsemi.com
www.microsemi.com
©2021 Microsemi, ບໍລິສັດຍ່ອຍທີ່ເປັນເຈົ້າຂອງທັງໝົດຂອງ Microchip Technology Inc. ສະຫງວນລິຂະສິດທັງໝົດ. Microsemi ແລະ ໂລໂກ້ Microsemi ແມ່ນເຄື່ອງໝາຍການຄ້າທີ່ຈົດທະບຽນຂອງບໍລິສັດ Microsemi. ເຄື່ອງໝາຍການຄ້າ ແລະເຄື່ອງໝາຍການບໍລິການອື່ນໆທັງໝົດແມ່ນເປັນຊັບສິນຂອງເຈົ້າຂອງຂອງຕົນ.
Microsemi Proprietary DG0703 ການແກ້ໄຂ 4.0
ເອກະສານ / ຊັບພະຍາກອນ
 |
ການກວດຫາຄວາມຜິດພາດ MICROCHIP ແລະການແກ້ໄຂໃນຫນ່ວຍຄວາມຈໍາ RTG4 LSRAM [pdf] ຄູ່ມືຜູ້ໃຊ້ ການສາທິດ DG0703, ການກວດຫາຂໍ້ຜິດພາດ ແລະການແກ້ໄຂໃນໜ່ວຍຄວາມຈຳ RTG4 LSRAM, ການກວດຫາ ແລະແກ້ໄຂໃນໜ່ວຍຄວາມຈຳ RTG4 LSRAM, ໜ່ວຍຄວາມຈຳ RTG4 LSRAM, ໜ່ວຍຄວາມຈຳ LSRAM |



