BOARD 6DOF IMU ကိုနှိပ်ပါ။

ထုတ်ကုန်အချက်အလက်
6DOF IMU ကလစ်သည် Maxim ၏ MAX21105 6-ဝင်ရိုး inertial တိုင်းတာခြင်းယူနစ်ကို သယ်ဆောင်ပေးသည့် ကလစ်ဘုတ်တစ်ခုဖြစ်သည်။ ၎င်းတွင် 3-axis gyroscope နှင့် 3-axis accelerometer တို့ ပါဝင်ပါသည်။ ချစ်ပ်သည် အလွန်တိကျသော တိုင်းတာမှုများကို ပေးစွမ်းပြီး ကျယ်ပြန့်သော အပူချိန်အကွာအဝေးတွင် တည်ငြိမ်စွာ လုပ်ဆောင်သည်။ ဘုတ်အဖွဲ့သည် ပစ်မှတ် MCU နှင့် mikroBUSTM SPI သို့မဟုတ် I2C ကြားခံများမှတဆင့် ဆက်သွယ်နိုင်သည်။ ၎င်းသည် 3.3V ပါဝါထောက်ပံ့မှုလိုအပ်သည်။
ထုတ်ကုန်အသုံးပြုမှု ညွှန်ကြားချက်များ
-
- ခေါင်းစည်းများကို ဂဟေဆော်ခြင်း-
- ကလစ်ဘုတ်ကိုအသုံးမပြုမီ၊ ဘုတ်၏ဘယ်ဘက်နှင့်ညာဘက်နှစ်ဖက်စလုံးတွင် 1×8 အထီးခေါင်းခေါင်းများကို ဂဟေဆော်ပါ။
- ဘုတ်ပြားကို ဇောက်ထိုးလှန်ပြီး ခေါင်းစီး၏ ပိုတိုသော ပင်တံများကို သင့်လျော်သော ဂဟေပြားများတွင် ထည့်ပါ။
- ဘုတ်ပြားကို အပေါ်ဘက်သို့ လှည့်ပြီး ခေါင်းစီးများကို ဘုတ်နှင့် ထောင့်ညီအောင် ညှိပါ။ တံများကို ဂရုတစိုက် ဂဟေဆော်ပါ။
- ဘုတ်ကို ပလပ်ထိုးခြင်း-
- ခေါင်းစည်းများကို ဂဟေဆော်ပြီးသည်နှင့်၊ သင့်ဘုတ်အား လိုချင်သော mikroBUSTM socket တွင် ထည့်သွင်းရန် အဆင်သင့်ဖြစ်နေပါပြီ။
- mikroBUSTM socket ရှိ Silkscreen ပေါ်ရှိ အမှတ်အသားများဖြင့် ဘုတ်၏ ညာဘက်အောက်ပိုင်းရှိ ဖြတ်တောက်မှုကို ချိန်ညှိပါ။
- ပင်နံပါတ်များအားလုံးကို မှန်ကန်စွာ ချိန်ညှိပါက ဘုတ်ပြားကို socket အတွင်းသို့ တောက်လျှောက်တွန်းပါ။
- Code examples-
- ခေါင်းစည်းများကို ဂဟေဆော်ခြင်း-
လိုအပ်သောပြင်ဆင်မှုများအားလုံးကို ပြီးသည်နှင့်၊ သင်သည် သင်၏ကလစ်ဘုတ်ကို စတင်အသုံးပြုနိုင်သည်။ ထွampmikroCTM၊ mikroBasicTM နှင့် mikroPascalTM compilers များကို မွေးမြူရေးလုပ်ငန်းမှ ဒေါင်းလုဒ်လုပ်နိုင်ပါသည်။ website.
-
- SMD Jumpers များ
ဘုတ်တွင် jumper သုံးစုံပါရှိသည်။
-
-
- INT SEL- မည်သည့်ကြားဖြတ်လိုင်းကို အသုံးပြုမည်ကို သတ်မှတ်ရန် အသုံးပြုသည်။
- COMM SEL- I2C မှ SPI သို့ပြောင်းရန်အသုံးပြုသည်။
- ADDR SEL- I2C လိပ်စာကို ရွေးချယ်ရန် အသုံးပြုသည်။
- ပံ့ပိုးမှု-
-
MikroElektronika သည် ထုတ်ကုန်၏သက်တမ်းကုန်ဆုံးသည်အထိ အခမဲ့နည်းပညာပံ့ပိုးမှုပေးပါသည်။ ပြဿနာတစ်စုံတစ်ရာ ကြုံတွေ့ပါက လာရောက်ကြည့်ရှုပါ။ www.mikroe.com/support အကူအညီအတွက်
မှတ်ချက် - အထက်ဖော်ပြပါ အချက်အလက်များသည် 6DOF IMU ကလစ်အတွက် အသုံးပြုသူလက်စွဲအပေါ် အခြေခံထားသည်။ အတိကျဆုံးနှင့် နောက်ဆုံးပေါ်အချက်အလက်များအတွက် တရားဝင်အသုံးပြုသူလက်စွဲကို ကိုးကားပါ သို့မဟုတ် ထုတ်လုပ်သူကို တိုက်ရိုက်ဆက်သွယ်ပါ။
နိဒါန်း
6DOF IMU ကလစ်သည် Maxim ၏ MAX21105 6-ဝင်ရိုး inertial တိုင်းတာမှုယူနစ်ကို 3-ဝင်ရိုး gyroscope နှင့် 3-axis accelerometer ပါ၀င်သည်။ ချစ်ပ်သည် ကျယ်ပြန့်သော အပူချိန်အကွာအဝေးထက် ရေရှည်တည်ငြိမ်သော လုပ်ဆောင်မှုနှင့်အတူ အလွန်တိကျသော inertial တိုင်းတာမှုယူနစ်ဖြစ်သည်။ ဘုတ်အဖွဲ့သည် ပစ်မှတ် MCU နှင့် mikroBUS™ SPI (CS, SCK, MISO, MOSI pins) သို့မဟုတ် I2C အင်တာဖေ့စ်များ (SCL, SDA) မှတဆင့် ဆက်သွယ်သည်။ အပို INT ပင်နံပါတ်ကိုလည်း ရနိုင်သည်။ 3.3V ပါဝါထောက်ပံ့မှုကိုသာ အသုံးပြုသည်။
ခေါင်းစည်းများကို ဂဟေဆော်ခြင်း။
သင်၏ကလစ်ဘုတ်™ကိုအသုံးမပြုမီ၊ ဘုတ်၏ဘယ်ဘက်နှင့်ညာခြမ်းနှစ်ဖက်စလုံးတွင် 1×8 အထီးခေါင်းများကို ဂဟေဆက်ကြောင်းသေချာပါစေ။ အထုပ်ထဲတွင် ဘုတ်ပြားနှင့်အတူ 1×8 အထီးခေါင်းနှစ်ခုပါရှိသည်။
အောက်ဘက်မှ သင့်အပေါ်ဘက်သို့ မျက်နှာမူနိုင်ရန် ဘုတ်ပြားကို ဇောက်ထိုးလှန်ပါ။ ခေါင်းစီး၏ ပိုတိုသော ပင်တံများကို သင့်လျော်သော ဂဟေပြားများတွင် ထည့်ပါ။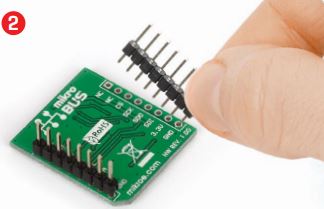
ဘုတ်ပြားကို အပေါ်သို့ နောက်တစ်ကြိမ် လှန်ပါ။ ခေါင်းစည်းများကို ဘုတ်နှင့် ထောင့်ညီစေရန် သေချာစွာ ချိန်ညှိပါ၊ ထို့နောက် ပင်များကို ဂရုတစိုက် ဂဟေဆော်ပါ။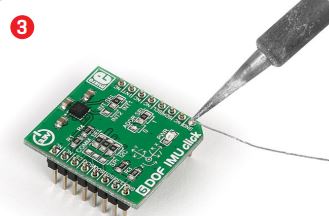
ဘုတ်ကို ချိတ်ပါ။
ခေါင်းစည်းများကို ဂဟေဆော်ပြီးသည်နှင့် သင့်ဘုတ်အား လိုချင်သော mikroBUS™ socket တွင် ထည့်သွင်းရန် အဆင်သင့်ဖြစ်နေပါပြီ။ mikroBUS socket ရှိ Silkscreen ပေါ်ရှိ အမှတ်အသားများဖြင့် ဘုတ်၏ ညာဘက်အောက်ပိုင်းရှိ ဖြတ်တောက်မှုကို သေချာစွာ ချိန်ညှိပါ။ ပင်နံပါတ်များအားလုံးကို မှန်ကန်စွာ ချိန်ညှိပါက ဘုတ်ပြားကို socket အတွင်းသို့ တောက်လျှောက်တွန်းပါ။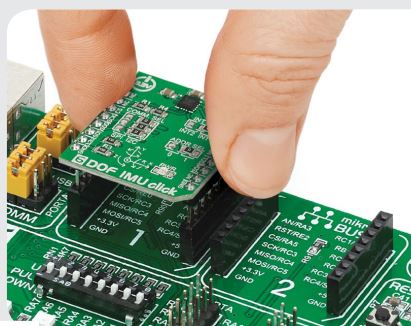
မရှိမဖြစ်အင်္ဂါရပ်များ
6DOF IMU click သည် ဥပမာအားဖြင့် platform stabilization စနစ်များကို ဒီဇိုင်းထုတ်ရန်အတွက် သင့်လျော်သည်။ampကင်မရာများနှင့် ဒရုန်းများတွင် le MAX21105 IC သည် အပူချိန်ထက်နိမ့်ပြီး linear gyroscope သုညအဆင့် ပျံ့လွင့်နေပြီး gyroscope အဆင့်နှောင့်နှေးမှုနည်းပါးသည်။ 512-byte FIFO ကြားခံသည် ပစ်မှတ် MCU ၏အရင်းအမြစ်များကို ကယ်တင်သည်။ gyroscope တွင် စကေးအပြည့်အကွာအဝေး ±250၊ ±500၊ ±1000 နှင့် ±2000 dps ရှိသည်။ accelerometer သည် ±2၊ ±4၊ ±8 နှင့် ±16g အပြည့်အ၀ရှိသည်။
သိပ္ပံပညာ
အတိုင်းအတာများ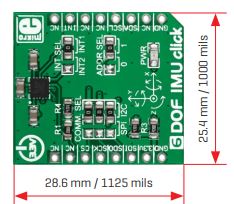
| mm | မီလီမီတာ | |
| အရှည် | 28.6 | 1125 |
| အကျယ် | 25.4 | 1000 |
| အမြင့်* | 3 | 118 |
ခေါင်းစဉ်များမပါဘဲ
Code examples
လိုအပ်သောပြင်ဆင်မှုများအားလုံးကို ပြီးသည်နှင့်၊ သင်၏ click board™ ကို စတင်လုပ်ဆောင်ရန် အချိန်ကျရောက်ပြီဖြစ်သည်။ ငါတို့က ဟောင်းကို ပေးထားတယ်။ampကျွန်ုပ်တို့၏မွေးမြူရေးတွင် mikroC™၊ mikroBasic™ နှင့် mikroPascal™ compilers များအတွက် les website. ၎င်းတို့ကို ဒေါင်းလုဒ်လုပ်ရုံဖြင့် စတင်ရန် အသင့်ဖြစ်ပါပြီ။
အထောက်အပံ့
MikroElektronika သည် အခမဲ့နည်းပညာပံ့ပိုးမှုပေးသည် (www.mikroe.com/support) ထုတ်ကုန်၏သက်တမ်းကုန်ဆုံးချိန်အထိ၊ ထို့ကြောင့် တစ်ခုခုမှားယွင်းပါက၊ ကျွန်ုပ်တို့သည် အဆင်သင့်ဖြစ်ပြီး ကူညီလိုစိတ်ရှိပါသည် ။
ရှင်းလင်းချက်
MikroElektronika သည် လက်ရှိစာရွက်စာတမ်းတွင် ပေါ်လာနိုင်သည့် အမှားအယွင်းများ သို့မဟုတ် မှန်ကန်မှုများအတွက် တာဝန် သို့မဟုတ် တာဝန်ခံမှု မရှိဟု ယူဆပါသည်။ လက်ရှိ schematic တွင်ပါရှိသော သတ်မှတ်ချက်များနှင့် အချက်အလက်များသည် အသိပေးခြင်းမရှိဘဲ အချိန်မရွေး ပြောင်းလဲနိုင်သည်။
- မူပိုင်ခွင့် © 2015 MikroElektronika။
- မူပိုင်ခွင့်ကိုလက်ဝယ်ထားသည်။
- www.mikroe.com
- မှဒေါင်းလုဒ်လုပ်ထားသည်။ Arrow.com.
စာရွက်စာတမ်းများ / အရင်းအမြစ်များ
 |
BOARD 6DOF IMU ကိုနှိပ်ပါ။ [pdf] အသုံးပြုသူလက်စွဲ MAX21105၊ 6DOF IMU နှိပ်ပါ၊ 6DOF IMU၊ 6DOF၊ IMU၊ နှိပ်ပါ |