ກົດ BOARD 6DOF IMU ຄລິກ

ຂໍ້ມູນຜະລິດຕະພັນ
ການຄລິກ 6DOF IMU ແມ່ນກະດານຄລິກທີ່ບັນຈຸຫນ່ວຍວັດແທກ inertial 21105-axis Maxim's MAX6. ມັນປະກອບດ້ວຍ gyroscope 3 ແກນແລະ 3-axis accelerometer. ຊິບສະຫນອງການວັດແທກທີ່ຖືກຕ້ອງສູງແລະດໍາເນີນການຢ່າງຫມັ້ນຄົງໃນໄລຍະອຸນຫະພູມກ້ວາງ. ກະດານສາມາດຕິດຕໍ່ສື່ສານກັບ MCU ເປົ້າຫມາຍໂດຍຜ່ານການໂຕ້ຕອບ mikroBUSTM SPI ຫຼື I2C. ມັນຮຽກຮ້ອງໃຫ້ມີການສະຫນອງພະລັງງານ 3.3V.
ຄໍາແນະນໍາການນໍາໃຊ້ຜະລິດຕະພັນ
-
- soldering ຫົວ:
- ກ່ອນທີ່ຈະນໍາໃຊ້ກະດານຄລິກ, solder 1×8 ຫົວຜູ້ຊາຍທັງສອງດ້ານຊ້າຍແລະຂວາຂອງຄະນະ.
- ຫັນກະດາດຂຶ້ນ ແລະວາງເຂັມສັ້ນກວ່າຂອງຫົວໃສ່ໃສ່ແຜ່ນຢາງທີ່ເໝາະສົມ.
- ຫັນກະດານຂຶ້ນເທິງ ແລະຈັດວາງສ່ວນຫົວໃຫ້ຕັ້ງສາກກັບກະດານ. ລະມັດລະວັງ solder pins ໄດ້.
- ການສຽບກະດານໃນ:
- ເມື່ອທ່ານໄດ້ soldered headers, ກະດານຂອງທ່ານພ້ອມທີ່ຈະຖືກຈັດໃສ່ເຂົ້າໄປໃນເຕົ້າຮັບ mikroBUSTM ທີ່ຕ້ອງການ.
- ວາງເສັ້ນຕັດຢູ່ໃນສ່ວນລຸ່ມຂວາຂອງກະດານດ້ວຍເຄື່ອງໝາຍເທິງຜ້າໄໝຢູ່ບ່ອນສຽບ mikroBUSTM.
- ຖ້າ pins ທັງຫມົດຖືກສອດຄ່ອງຢ່າງຖືກຕ້ອງ, ຍູ້ກະດານທັງຫມົດເຂົ້າໄປໃນເຕົ້າຮັບ.
- ລະຫັດ examples:
- soldering ຫົວ:
ເມື່ອທ່ານໄດ້ເຮັດການກະກຽມທີ່ຈໍາເປັນທັງຫມົດ, ທ່ານສາມາດເລີ່ມຕົ້ນໃຊ້ກະດານຄລິກຂອງທ່ານ. ຕົວຢ່າງamples ຂອງ mikroCTM, mikroBasicTM, ແລະ mikroPascalTM compilers ສາມາດດາວໂຫຼດໄດ້ຈາກ Livestock webເວັບໄຊ.
-
- SMD Jumpers:
ກະດານມີສາມຊຸດ jumpers:
-
-
- INT SEL: ໃຊ້ເພື່ອລະບຸວ່າຈະໃຊ້ເສັ້ນຂັດຈັງຫວະໃດ.
- COM SEL: ໃຊ້ເພື່ອປ່ຽນຈາກ I2C ເປັນ SPI.
- ADDR SEL: ໃຊ້ເພື່ອເລືອກທີ່ຢູ່ I2C.
- ສະຫນັບສະຫນູນ:
-
MikroElektronika ສະຫນອງການສະຫນັບສະຫນູນເຕັກໂນໂລຢີຟຣີຈົນກ່ວາໃນຕອນທ້າຍຂອງຊີວິດຂອງຜະລິດຕະພັນ. ຖ້າຫາກທ່ານພົບບັນຫາໃດຫນຶ່ງ, ໄປຢ້ຽມຢາມ www.mikroe.com/support ສໍາລັບການຊ່ວຍເຫຼືອ.
ໝາຍເຫດ: ຂໍ້ມູນທີ່ສະຫນອງໃຫ້ຂ້າງເທິງນີ້ແມ່ນອີງໃສ່ຄູ່ມືຜູ້ໃຊ້ສໍາລັບການຄລິກ 6DOF IMU. ສໍາລັບຂໍ້ມູນທີ່ຖືກຕ້ອງແລະທັນສະໄຫມທີ່ສຸດ, ເບິ່ງຄູ່ມືຜູ້ໃຊ້ຢ່າງເປັນທາງການຫຼືຕິດຕໍ່ຜູ້ຜະລິດໂດຍກົງ.
ແນະນຳ
6DOF IMU click ດໍາເນີນຫນ່ວຍວັດແທກ inertial 21105-axis Maxim ຂອງ Maxim ທີ່ປະກອບດ້ວຍ gyroscope 6-axis ແລະ 3-axis accelerometer. ຊິບແມ່ນຫນ່ວຍວັດແທກ inertial ທີ່ຖືກຕ້ອງສູງທີ່ມີການດໍາເນີນງານທີ່ຫມັ້ນຄົງໃນໄລຍະຍາວໃນໄລຍະອຸນຫະພູມກວ້າງ. ກະດານສື່ສານກັບ MCU ເປົ້າໝາຍບໍ່ວ່າຈະຜ່ານ mikroBUS™ SPI (CS, SCK, MISO, MOSI pins) ຫຼື I3C interfaces (SCL, SDA). ມີ PIN INT ເພີ່ມເຕີມ. ໃຊ້ການສະຫນອງພະລັງງານ 2V ເທົ່ານັ້ນ.
soldering ຫົວ
ກ່ອນທີ່ຈະນໍາໃຊ້ click board™ ຂອງທ່ານ, ເຮັດໃຫ້ແນ່ໃຈວ່າການ solder ຫົວຊາຍ 1×8 ທັງສອງຊ້າຍແລະຂວາຂອງຄະນະກໍາມະ. ສອງຫົວຊາຍ 1×8 ແມ່ນລວມຢູ່ໃນກະດານ.
ຫັນກະດາດຂຶ້ນເພື່ອໃຫ້ດ້ານລຸ່ມຫັນໜ້າເຈົ້າຂຶ້ນ. ວາງ pins ສັ້ນກວ່າຂອງ header ເຂົ້າໄປໃນແຜ່ນ soldering ທີ່ເຫມາະສົມ.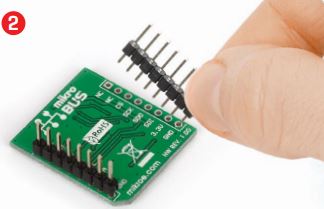
ຫັນກະດານຂຶ້ນອີກ. ໃຫ້ແນ່ໃຈວ່າຈັດວາງຫົວເພື່ອໃຫ້ມັນຕັ້ງສາກກັບກະດານ, ຫຼັງຈາກນັ້ນ solder pins ລະມັດລະວັງ.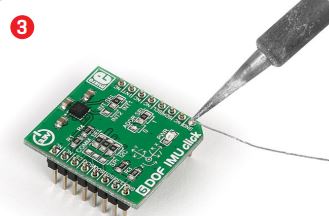
ການສຽບກະດານເຂົ້າ
ເມື່ອທ່ານໄດ້ solder headers ກະດານຂອງທ່ານພ້ອມທີ່ຈະຖືກໃສ່ເຂົ້າໄປໃນເຕົ້າຮັບ mikroBUS™ ທີ່ຕ້ອງການ. ໃຫ້ແນ່ໃຈວ່າການຈັດການຕັດຢູ່ໃນສ່ວນລຸ່ມຂວາຂອງກະດານດ້ວຍເຄື່ອງຫມາຍໃນ silkscreen ຢູ່ເຕົ້າຮັບ mikroBUS. ຖ້າ pins ທັງຫມົດຖືກສອດຄ່ອງຢ່າງຖືກຕ້ອງ, ຍູ້ກະດານທັງຫມົດເຂົ້າໄປໃນເຕົ້າຮັບ.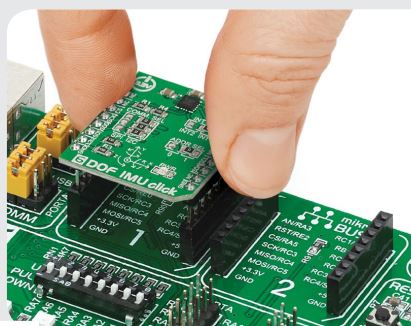
ລັກສະນະທີ່ສໍາຄັນ
6DOF IMU click ແມ່ນເຫມາະສົມສໍາລັບການອອກແບບລະບົບສະຖຽນລະພາບເວທີ, ສໍາລັບການຍົກຕົວຢ່າງample ໃນກ້ອງຖ່າຍຮູບແລະ drones MAX21105 IC ມີລະດັບ gyroscope ຕ່ໍາແລະເປັນເສັ້ນເປັນສູນ drift ໃນໄລຍະອຸນຫະພູມ, ແລະການຊັກຊ້າໄລຍະ gyroscope ຕ່ໍາ. 512-byte FIFO buffer ຊ່ວຍປະຢັດຊັບພະຍາກອນຂອງ MCU ເປົ້າຫມາຍ. gyroscope ມີລະດັບຂະຫນາດເຕັມຂອງ ±250, ±500, ±1000, ແລະ ±2000 dps. ເຄື່ອງວັດແທກຄວາມເລັ່ງມີຂະໜາດເຕັມ ±2, ±4, ±8, ແລະ ±16g.
ແຜນວາດ
ຂະໜາດ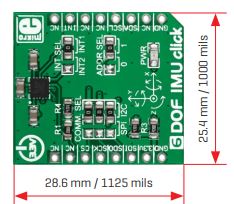
| mm | ມິນລິລິດ | |
| ຄວາມຍາວ | 28.6 | 1125 |
| ກວ້າງ | 25.4 | 1000 |
| HEIGHT* | 3 | 118 |
ໂດຍບໍ່ມີສ່ວນຫົວ
ລະຫັດ examples
ເມື່ອທ່ານໄດ້ເຮັດການກະກຽມທີ່ຈໍາເປັນທັງຫມົດ, ມັນເຖິງເວລາທີ່ຈະເຮັດໃຫ້ກະດານຄລິກ™ຂອງທ່ານຂຶ້ນແລະແລ່ນ. ພວກເຮົາໄດ້ສະຫນອງໃຫ້ examples ສໍາລັບ mikroC™, mikroBasic™, ແລະ mikroPascal™ compilers ກ່ຽວກັບການລ້ຽງສັດຂອງພວກເຮົາ webເວັບໄຊ. ພຽງແຕ່ດາວນ໌ໂຫລດໃຫ້ເຂົາເຈົ້າແລະທ່ານພ້ອມທີ່ຈະເລີ່ມຕົ້ນ.
ສະຫນັບສະຫນູນ
MikroElektronika ສະຫນອງການສະຫນັບສະຫນູນເຕັກໂນໂລຢີຟຣີ (www.mikroe.com/support) ຈົນກ່ວາຫມົດອາຍຸຂອງຜະລິດຕະພັນ, ດັ່ງນັ້ນຖ້າຫາກວ່າມີຫຍັງຜິດພາດ, ພວກເຮົາພ້ອມແລະເຕັມໃຈທີ່ຈະຊ່ວຍ!
ປະຕິເສດຄວາມຮັບຜິດຊອບ
MikroElektronika ສົມມຸດວ່າບໍ່ມີຄວາມຮັບຜິດຊອບຫຼືຄວາມຮັບຜິດຊອບຕໍ່ຄວາມຜິດພາດຫຼືຄວາມບໍ່ຖືກຕ້ອງທີ່ອາດຈະປາກົດຢູ່ໃນເອກະສານປະຈຸບັນ. ຂໍ້ມູນຈໍາເພາະແລະຂໍ້ມູນທີ່ມີຢູ່ໃນ schematic ປະຈຸບັນແມ່ນມີການປ່ຽນແປງໄດ້ທຸກເວລາໂດຍບໍ່ມີການແຈ້ງການ.
- ສະຫງວນລິຂະສິດ © 2015 MikroElektronika.
- ສະຫງວນລິຂະສິດທັງໝົດ.
- www.mikroe.com
- ດາວໂຫຼດຈາກ Arrow.com.
ເອກະສານ / ຊັບພະຍາກອນ
 |
ກົດ BOARD 6DOF IMU ຄລິກ [pdf] ຄູ່ມືຜູ້ໃຊ້ MAX21105, 6DOF IMU ຄລິກ, 6DOF IMU, 6DOF, IMU, ຄລິກ |