![]() แบรนด์อิเล็กทรอนิกส์ควบคุมของอเมริกา
แบรนด์อิเล็กทรอนิกส์ควบคุมของอเมริกา
MDVF03
เปิดโดยใช้ไมโครโปรเซสเซอร์แชสซี
ไดรฟ์ความถี่ตัวแปรพร้อมตัวแยกสำหรับมอเตอร์ไฟฟ้ากระแสสลับเดี่ยวและสามเฟส
ข้อมูลจำเพาะ
| แบบอย่าง | บรรทัดฉบับtagอี (VAC) | มอเตอร์โวลtagอี (VAC) | กระแสมอเตอร์ต่อเนื่อง (Amps) | ช่วงแรงม้าของมอเตอร์ |
| MDVF03-D230-PCM | 115 หรือ 230 | 115 230 | 3.0* | 1/16 – 3/8 1/8 – 3/4 |
* เมื่อติดตั้งเพื่อให้อากาศไหลผ่านแผ่นขึ้นไป
* ลดอัตราเป็น 2.5 ampเมื่อติดตั้งในการกำหนดค่าอื่น
สายไฟฟ้ากระแสสลับฉบับที่tage …… 115/230 VAC ± 10%, 50/60 Hz, เฟสเดียว
กระแสไฟกระแสสลับกระแสสลับพร้อมแรงดันกระแสไฟ 115 VACtage พร้อมมอเตอร์ 115V………………………………6.7 amps
กระแสไฟกระแสสลับกระแสสลับพร้อมแรงดันกระแสไฟ 115 VACtage พร้อมมอเตอร์ 230V …………………….10.7 amps
กระแสไฟกระแสสลับกระแสสลับพร้อมแรงดันกระแสไฟ 230 VACtage พร้อมมอเตอร์ 230V………………………………6.7 amps
มอเตอร์ไฟฟ้ากระแสสลับtage ……………………………………115 หรือ 230 VAC, 50/60 Hz, เฟสเดียวหรือสามเฟส
ความสามารถในการโอเวอร์โหลด…………………………………………..200% (2x) เป็นเวลา 1 นาที
ความถี่พาหะมาตรฐาน………………………………………………………1.6 หรือ 16 kHz
ช่วงความถี่เอาท์พุต………………………………………….0 – 120 Hz
การฉีด DC ปริมาตรtagจ…………………………………………………………0 – 27 VDC
การฉีด DC ปริมาตรtage เวลา……………………………………………0 – 5 วินาที
ช่วงเวลาการเร่งความเร็ว (0 – 60 Hz) …………………………………..0.5 – 12 วินาที
ช่วงเวลาการชะลอตัว (60 – 0 Hz) ………………………………………….0.5 – 12 วินาที
ช่วงสัญญาณอินพุตแบบอะนาล็อก……………………………………..0 ± 5 VDC, 0 ± 10 VDC, 4 – 20 mA
ความต้านทานอินพุต (S1 ถึง S2) ……………………………………………..>50K โอห์ม
การสั่นสะเทือนสูงสุด (0 – 50 Hz, >50 Hz) …………………………… 0.5G, สูงสุด 0.1G
ช่วงอุณหภูมิอากาศโดยรอบ………………………………32°F – 104°F (0°C – 40°C)
น้ำหนัก…………………………………………………………………………………….1.20 ปอนด์ (0.54 กิโลกรัม)
การรับรองความปลอดภัย……………………………..cULus Listed, UL 61800-5-1, File #E132235
คำเตือนด้านความปลอดภัย
อ่านคำเตือนด้านความปลอดภัยทั้งหมดก่อนที่จะติดตั้งอุปกรณ์นี้
- อย่าติดตั้ง ถอด หรือเดินสายไฟอุปกรณ์นี้ใหม่โดยที่ยังใช้พลังงานอยู่ ให้ช่างเทคนิคไฟฟ้าที่ผ่านการรับรองติดตั้ง ปรับแต่ง และซ่อมบำรุงอุปกรณ์นี้ ปฏิบัติตามรหัสไฟฟ้าแห่งชาติและรหัสไฟฟ้าและความปลอดภัยที่เกี่ยวข้องทั้งหมด รวมถึงข้อกำหนดของพระราชบัญญัติความปลอดภัยและอาชีวอนามัย (OSHA) เมื่อติดตั้งอุปกรณ์
- ศักย์ไฟฟ้าของวงจรอยู่ที่ 115 หรือ 230 VAC เหนือพื้นดิน หลีกเลี่ยงการสัมผัสโดยตรงกับแผงวงจรพิมพ์หรือส่วนประกอบของวงจร เพื่อป้องกันความเสี่ยงต่อการบาดเจ็บสาหัสหรือการเสียชีวิต ใช้ไขควงที่ไม่ใช่โลหะเพื่อปรับหม้อปรับเทียบ ใช้อุปกรณ์ป้องกันส่วนบุคคลที่ได้รับอนุมัติและเครื่องมือหุ้มฉนวนหากทำงานกับไดรฟ์นี้โดยจ่ายไฟ
- ลดโอกาสเกิดเพลิงไหม้จากไฟฟ้า ไฟฟ้าช็อต หรือการระเบิดโดยใช้เทคนิคการต่อสายดิน การป้องกันกระแสไฟเกิน การป้องกันความร้อน และกล่องหุ้มที่เหมาะสม ปฏิบัติตามขั้นตอนการบำรุงรักษาเสียง
- Minarik Drives ขอแนะนำอย่างยิ่งให้ติดตั้งสวิตช์ไฟหลักในบรรทัดที่ 2tagอีอินพุต หน้าสัมผัสสวิตช์ควรได้รับพิกัด 250 VAC และ 200% ของกระแสป้ายชื่อมอเตอร์
- การถอดสายไฟ AC เป็นวิธีเดียวที่ยอมรับได้สำหรับการหยุดฉุกเฉิน อย่าใช้ระบบเบรกแบบฉีด DC ชะลอความเร็วลงจนสุด หรือเคลื่อนที่จนหยุดเพื่อหยุดฉุกเฉิน พวกเขาไม่สามารถหยุดไดรฟ์ที่ทำงานผิดปกติได้
- การสตาร์ทและการหยุดสาย (การต่อและถอดสาย AC ฉบับที่ 1)tage) แนะนำสำหรับการสตาร์ทและการหยุดไดรฟ์ไม่บ่อยนักเท่านั้น แนะนำให้เบรกแบบจ่ายพลังงานใหม่ ลดความเร็วลงเหลือความเร็วต่ำสุด หรือการเคลื่อนตัวจนถึงจุดหยุด สำหรับการสตาร์ทและหยุดบ่อยครั้ง การสตาร์ทและการหยุดบ่อยครั้งสามารถสร้างแรงบิดสูงได้ นี่อาจทำให้มอเตอร์เสียหายได้
- อย่าถอดสายไฟของมอเตอร์ออกจากชุดขับเคลื่อน เว้นแต่จะมีการถอดสายไฟหรือชุดขับออก ถูกปิดใช้งาน. การเปิดประตูสายใดสายหนึ่งในขณะที่ไดรฟ์กำลังทำงานอยู่อาจทำให้ไดรฟ์เสียหายได้
- ไม่ควรรวมสายไฟและระดับลอจิกเข้าด้วยกันไม่ว่าในกรณีใด
- ตรวจสอบให้แน่ใจว่าแถบโพเทนชิออมิเตอร์ไม่ได้สัมผัสกับตัวโพเทนชิออมิเตอร์ การต่อสายดินเข้ากับอินพุตจะทำให้ไดรฟ์เสียหาย
- เชื่อมต่อกับขั้วต่อ L2-DBL เท่านั้น หากใช้สาย 115 VAC กับมอเตอร์ที่มีพิกัดสูงกว่า 120 VAC
- ควรใช้ความระมัดระวังเมื่อใช้งานมอเตอร์ระบายความร้อนด้วยพัดลมที่ความเร็วต่ำ เนื่องจากพัดลมอาจไม่สามารถหมุนเวียนอากาศได้เพียงพอเพื่อทำให้มอเตอร์เย็นลงอย่างเหมาะสม Minarik Drives ขอแนะนำให้ใช้มอเตอร์ "หน้าที่อินเวอร์เตอร์" เมื่อช่วงความเร็วเกิน 10:1
- ผลิตภัณฑ์นี้ไม่มีการป้องกันโอเวอร์โหลดมอเตอร์โซลิดสเตตภายใน ไม่มีการป้องกันการโอเวอร์โหลดที่ไวต่อความเร็ว การเก็บรักษาหน่วยความจำความร้อน หรือข้อกำหนดในการรับและดำเนินการกับสัญญาณจากอุปกรณ์ระยะไกลสำหรับการป้องกันอุณหภูมิเกิน หากจำเป็นต้องมีการป้องกันมอเตอร์ในผลิตภัณฑ์การใช้งานขั้นสุดท้าย จะต้องมีอุปกรณ์เพิ่มเติมตามมาตรฐาน NEC
ขนาด
 การติดตั้ง
การติดตั้ง
การติดตั้ง
- ส่วนประกอบของไดรฟ์มีความไวต่อการคายประจุไฟฟ้าสถิต หลีกเลี่ยงการสัมผัสโดยตรงกับแผงวงจร จับไดรฟ์ไว้ที่แผ่นเท่านั้น
- ปกป้องไดรฟ์จากสิ่งสกปรก ความชื้น และการสัมผัสโดยไม่ตั้งใจ
- จัดให้มีพื้นที่เพียงพอสำหรับการเข้าถึงหน้าจอเทอร์มินัลและหม้อปรับเทียบ
- ติดตั้งไดรฟ์ให้ห่างจากแหล่งความร้อน ใช้งานชุดขับภายในช่วงอุณหภูมิการทำงานของอากาศโดยรอบที่ระบุ
- ป้องกันการเชื่อมต่อที่หลวมโดยหลีกเลี่ยงการสั่นสะเทือนที่มากเกินไปของไดรฟ์
- ติดตั้งไดรฟ์กับบอร์ดในระนาบแนวนอนหรือแนวตั้ง รู 0.17 นิ้ว (4 มม.) หกรูในเพลตยอมรับสกรูหัวกระทะ #8 หากติดตั้งในแนวนอน ไดรฟ์จะต้องถูกลดพิกัดเป็น 2.5 amps.
- แผ่นควรต่อสายดิน
การเดินสายไฟ: ใช้สายไฟ 16 – 18 AWG 75°C สำหรับสายไฟ AC (L1, L2, L2-DBL) และสายไฟมอเตอร์ (U/A2, V/A1, W) ใช้สาย 18 – 24 AWG สำหรับการเดินสายลอจิก (COM, DIR, EN, Sl, S2, S3) ปฏิบัติตามมาตรฐาน NEC สำหรับการเดินสายไฟ แรงบิดในการขันแน่นสำหรับขั้วต่อจ่ายไฟ TB502 ที่แผงด้านล่างคือ 9 ปอนด์นิ้ว (1.0 นิวตันเมตร) แรงบิดในการขันแน่นสำหรับขั้วต่อลอจิก TB501 และ TB502 บนบอร์ดด้านบนคือ 1.77 ปอนด์นิ้ว (0.2 นิวตันเมตร)
แนวทางการป้องกัน: ตามกฎทั่วไป แนะนำให้ป้องกันตัวนำทั้งหมด หากไม่สามารถป้องกันตัวนำไฟฟ้าได้ แนะนำให้ป้องกันสายระดับลอจิกทั้งหมด หากการป้องกันสายระดับลอจิกไม่สามารถทำได้ ผู้ใช้ควรบิดสายลอจิกทั้งหมดด้วยตัวเองเพื่อลดเสียงรบกวนที่เกิดขึ้น อาจจำเป็นต้องต่อสายดินกับสายเคเบิลที่มีฉนวนหุ้ม หากเกิดเสียงรบกวนจากอุปกรณ์อื่นที่ไม่ใช่ไดรฟ์ ให้ต่อกราวด์ชีลด์ที่ปลายไดรฟ์ หากมีเสียงรบกวนเกิดขึ้นจากไดรฟ์ ให้ต่อกราวด์ที่ส่วนปลายออกจากไดรฟ์ อย่าต่อสายดินทั้งสองด้านของโล่
พิกัดกระแสไฟลัดวงจร (SCCR): ไดรฟ์นี้เหมาะสำหรับใช้กับวงจรที่สามารถจ่ายกระแสได้ไม่เกิน 5,000 rms แบบสมมาตร Ampสูงสุด 115/230 โวลต์
การป้องกันวงจรสาขา: ผลิตภัณฑ์นี้มีการป้องกันวงจรโซลิดสเตตในตัว ซึ่งไม่มีการป้องกันวงจรย่อย การป้องกันวงจรย่อยต้องเป็นไปตามประมวลกฎหมายไฟฟ้าแห่งชาติและประมวลกฎหมายท้องถิ่นเพิ่มเติม รายการ UL กำหนดให้ต้องใช้ฟิวส์ Class J, Class CC หรือ Class T ที่พิกัดกระแสไฟขั้นต่ำ 230 VAC ขอแนะนำให้ใช้ฟิวส์ที่พิกัด 200% ของกระแสมอเตอร์สูงสุด เว้นแต่ว่าจะใช้ชุดขับในการทำงานแบบทวีคูณ ซึ่งในกรณีนี้ ฟิวส์ควรได้รับพิกัด 400% ของกระแสมอเตอร์สูงสุด ฟิวส์ขา HOT ของสาย AC เมื่อใช้ 115 VAC และทั้งสองเส้นเมื่อใช้ 230 VAC
กำลัง (กระดานด้านล่าง)
อินพุตสาย AC
เชื่อมต่อสายไฟ AC ปริมาณtage ไปยังเทอร์มินัล L1 และ L2 หากต้องการใช้โหมดตัวคูณ (เอาต์พุต 230 VAC พร้อมอินพุต 115 VAC) ให้เชื่อมต่อสายไฟ AC ปริมาตรtage ไปยังเทอร์มินัล L1 และ L2-DBL อย่าทำการเชื่อมต่อกับ L2-DBL หากใช้แหล่งกำเนิดสาย 230 VAC
มอเตอร์
เชื่อมต่อสายมอเตอร์เข้ากับขั้วต่อ U/A2, V/A1 และ W หากมอเตอร์ไม่หมุนในทิศทางที่ต้องการ ให้ปิดระบบขับเคลื่อนและย้อนกลับการเชื่อมต่อสองในสามรายการนี้
ลอจิก (กระดานด้านบน)
โพเทนชิออมิเตอร์ความเร็ว
ใช้โพเทนชิออมิเตอร์ 10K โอห์ม 1/4 W เพื่อควบคุมความเร็ว เชื่อมต่อปลายทวนเข็มนาฬิกาของโพเทนชิออมิเตอร์เข้ากับ S1, ที่ปัดน้ำฝนเข้ากับ S2 และปลายตามเข็มนาฬิกาไปที่ S3 หากโพเทนชิออมิเตอร์ทำงานผกผันกับฟังก์ชันที่ต้องการ (เช่น เพื่อเพิ่มความเร็วมอเตอร์ คุณต้องหมุนโพเทนชิออมิเตอร์ทวนเข็มนาฬิกา) ปิดชุดขับและสลับการเชื่อมต่อ S1 และ S3
ช่วงสัญญาณอินพุตแบบอะนาล็อก
แทนที่จะใช้โพเทนชิออมิเตอร์ ไดรฟ์อาจต่อสายตามสัญญาณอินพุตแบบอะนาล็อก สัญญาณอินพุตนี้สามารถอยู่ในรูปของปริมาตรtage (0 ± 5, 0 ± 10 VDC) หรือกระแส (4- 20 mA) การแยกสัญญาณในตัวทำให้สัญญาณอินพุตสามารถต่อสายดินหรือไม่ต่อสายดินได้ (ลอย) เชื่อมต่อสัญญาณร่วม / ลบ (-) เข้ากับ S1 และสัญญาณอ้างอิง / บวก (+) เข้ากับ S2 โปรดดูส่วนการเริ่มต้นสำหรับการตั้งค่าจัมเปอร์ที่เกี่ยวข้อง
เปิดใช้งาน
ขั้วต่อสั้น EN และ COM เพื่อเร่งมอเตอร์เพื่อกำหนดความเร็ว เปิดขั้วต่อ ENABLE เพื่อเคลื่อนที่หรือเบรกมอเตอร์ไปที่ความเร็วเป็นศูนย์ โปรดดู DIP Switch 3 ในส่วน Statup สำหรับการตั้งค่าจัมเปอร์ หากไม่ต้องการสวิตช์ ENABLE ให้ต่อจัมเปอร์ระหว่างเทอร์มินัล COM และ EN อย่าใช้การเปิดใช้งานสำหรับการหยุดฉุกเฉิน
ทิศทาง
ขั้วต่อสั้น DIR และ COM เพื่อเปลี่ยนทิศทางของมอเตอร์ หากไม่ต้องการสวิตช์ทิศทาง ให้เปิดการเชื่อมต่อนี้ทิ้งไว้
การเริ่มต้น
เลือกสวิตช์
เลือกสวิตช์ (SW501)
สวิตช์ดิป 1: เปิด - เอาต์พุต 115 VAC - ตั้งค่าเอาต์พุต 115 VAC ด้วยอินพุต 115 หรือ 230 VAC
ปิด – เอาต์พุต 230 VAC – ตั้งค่าเอาต์พุต 230 VAC ด้วยอินพุต 115 หรือ 230 VAC
สวิตช์จุ่ม 1:
สวิตช์ดิป 2: เปิด – 50 Hz – ตั้งค่าความถี่พื้นฐาน 50 Hz บนเอาต์พุต
ปิด – 60 Hz – ตั้งค่าความถี่พื้นฐานเป็น 50 Hz บนเอาต์พุต
สวิตช์จุ่ม 1:
สวิตช์ดิป 3: เปิด - โหมดเบรก - การเปิดสวิตช์เปิดใช้งานจะเบรกมอเตอร์ไปที่ความเร็วเป็นศูนย์ด้วย
การเบรกแบบฉีด DC โดยไม่ต้องใช้ decel ramp.
สวิตช์จุ่ม 1:
ปิด – เปิดใช้งานโหมด – การเปิดสวิตช์ ENABLE จะทำให้มอเตอร์ลื่นไหลจนหยุด
สวิตช์ Dip 4: เปิด - ความถี่พาหะ 1.6 kHz (ได้ยินได้ แต่ป้องกันการสะดุดของ GFI)
ปิด – ความถี่พาหะ 16 kHz (ไม่ได้ยิน แต่อาจทำให้ GFI สะดุด)
สวิตช์จุ่ม 1:

การเริ่มต้น
– ตรวจสอบว่าไม่มีวัสดุนำไฟฟ้าแปลกปลอมอยู่บนแผงวงจรพิมพ์
– ตรวจสอบให้แน่ใจว่าสวิตช์และจัมเปอร์ทั้งหมดได้รับการตั้งค่าอย่างเหมาะสม
- หมุนโพเทนชิออมิเตอร์ปรับความเร็วทวนเข็มนาฬิกา (CCW) หรือตั้งค่าสัญญาณอินพุตแบบอะนาล็อกเป็น 1. ต่ำสุด
- ใช้สายไฟ AC ฉบับที่tage.
- ปิดสวิตช์เปิดใช้งานและตรวจสอบว่าไฟ LED สีเขียว (IL1) กะพริบหรือไม่
- ค่อยๆ เลื่อนความเร็วปรับโพเทนชิออมิเตอร์ตามเข็มนาฬิกา (CW) หรือเพิ่มสัญญาณอินพุตแบบอะนาล็อก มอเตอร์ควรเร่งความเร็วเมื่อโพเทนชิออมิเตอร์หมุนตามเข็มนาฬิกาหรือเมื่อสัญญาณแอนะล็อกเพิ่มขึ้น ต่อไปจนกว่าจะถึงความเร็วที่ต้องการ
- ถอดสาย AC ฉบับtage จากชุดขับไปจนถึงการลื่นไหลของมอเตอร์จนถึงจุดหยุด
ไฟ LED
กำลังไฟฟ้า (IL1): LED สีเขียวจะติดค้างเมื่อสาย AC voltage ถูกนำไปใช้กับไดรฟ์ แต่ไดรฟ์ถูกปิดใช้งาน มันจะกะพริบทุกครั้งที่สาย AC voltage ถูกนำไปใช้กับไดรฟ์และไดรฟ์ถูกเปิดใช้งาน
สถานะ (IL2): ไฟ LED สีแดงจะติดค้างเมื่ออยู่ในขีดจำกัดปัจจุบันหรือกะพริบตามรหัสความผิดปกติ:
กะพริบ 2 ครั้ง: Undervoltage – DC BUS ภายในฉบับที่tage ลดลงต่ำเกินไป
3 กะพริบ: Overvoltage – DC BUS ภายในฉบับที่tagสูงขึ้นเกินไป
กะพริบ 4 ครั้ง: ขีดจำกัดกระแสหรือไฟฟ้าลัดวงจร – ชุดขับอยู่ในขีดจำกัดกระแสหรือตรวจพบการลัดวงจรในมอเตอร์
กะพริบ 5 ครั้ง: ปิดเครื่องเมื่ออุณหภูมิเกิน – อุณหภูมิของชุดขับถึงอุณหภูมิวิกฤต
กะพริบ 6 ครั้ง: คำเตือนอุณหภูมิเกิน – อุณหภูมิของระบบขับเคลื่อนเข้าใกล้อุณหภูมิวิกฤต กระแสไฟฟ้าสูงสุดของมอเตอร์จะค่อยๆ ลดลงเมื่ออุณหภูมิของชุดขับเพิ่มขึ้น
ลิขสิทธิ์ 2018 โดย American Control Electronics® – สงวนลิขสิทธิ์ ห้ามทำซ้ำหรือส่งต่อส่วนใดส่วนหนึ่งของเอกสารนี้ในรูปแบบใดๆ โดยไม่ได้รับอนุญาตเป็นลายลักษณ์อักษรจาก American Control Electronics® ข้อมูลและข้อมูลทางเทคนิคในเอกสารนี้อาจเปลี่ยนแปลงได้โดยไม่ต้องแจ้งให้ทราบล่วงหน้า American Control Electronics® ไม่รับประกันใด ๆ ที่เกี่ยวข้องกับเนื้อหานี้ รวมถึงแต่ไม่จำกัดเพียง การรับประกันโดยนัยเกี่ยวกับความสามารถเชิงพาณิชย์และความเหมาะสมสำหรับวัตถุประสงค์ที่กำหนด American Control Electronics® จะไม่รับผิดชอบต่อข้อผิดพลาดใดๆ ที่อาจปรากฏในเอกสารนี้ และไม่มีข้อผูกมัดที่จะอัปเดตหรือรักษาข้อมูลในเอกสารนี้เป็นปัจจุบัน
การดำเนินการ
ประเภทมอเตอร์
ประเภทของมอเตอร์ที่ยอมรับได้ ได้แก่ การเหนี่ยวนำ 3 เฟส, ตัวเก็บประจุแบบแยกส่วนถาวร (PSC), ขั้วแรเงา และซิงโครนัสแบบ AC ไม่แนะนำให้ใช้มอเตอร์ชนิดสตาร์ทคาปาซิเตอร์
ซีรีส์ PMF ได้รับการออกแบบมาเพื่อเอาต์พุตความถี่ที่แตกต่างกันและปริมาตรตามสัดส่วนtage เพื่อเปลี่ยนความเร็วของมอเตอร์เฟสเดียว อย่างไรก็ตาม มอเตอร์เฟสเดียวได้รับการปรับให้เหมาะสมสำหรับการทำงานที่ความเร็วสูงสุด และอาจไม่ทำงานด้วยแรงบิดที่คาดหวังที่ความเร็วอื่นนอกเหนือจากความเร็วเต็มพิกัด เนื่องจาก PMF มีความสามารถในการแปลงอินพุต 115 VAC เฟสเดียวเป็นเอาต์พุต 230 VAC สามเฟส จึงแนะนำให้ใช้มอเตอร์สามเฟสในการใช้งานใหม่
ข้อต่อมอเตอร์
การทำงานแบบเฟสเดียว - ไม่ย้อนกลับ
สำหรับการใช้งานเฟสเดียว ให้เชื่อมต่อมอเตอร์ตามที่แสดงในภาพด้านล่าง ตรวจสอบให้แน่ใจว่าตัวเก็บประจุที่ต่อสายล่วงหน้าและขดลวดมอเตอร์ที่เกี่ยวข้องเชื่อมต่อกับขั้วต่อ U และ V ดังที่แสดง การเชื่อมต่อนี้อาจเป็นแบบภายในหากใช้มอเตอร์ 2 สาย หากมอเตอร์มีสายสามเส้น คุณต้องทำการเชื่อมต่อด้วยตนเอง การทำงานแบบเฟสเดียว - การย้อนกลับ
การทำงานแบบเฟสเดียว - การย้อนกลับ
ถอดตัวเก็บประจุออกและเชื่อมต่อมอเตอร์ดังแสดงในรูปด้านล่าง ในขณะที่อนุญาตให้มีการย้อนกลับโซลิดสเตต รูปแบบการเดินสายนี้อาจส่งผลให้การทำงานของมอเตอร์ทำงานได้ไม่ดีนัก มอเตอร์อาจจำเป็นต้องถูกลดพิกัด ทั้งนี้ขึ้นอยู่กับข้อกำหนดด้านโครงสร้างของมอเตอร์และการใช้งาน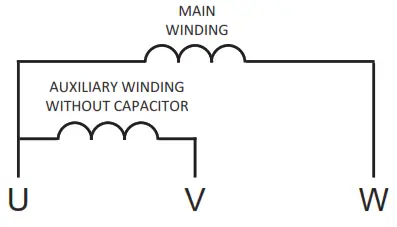
การทำงานแบบสามเฟส
สำหรับการใช้งานแบบสามเฟส ให้เชื่อมต่อมอเตอร์ดังแสดงในรูปด้านล่าง เชื่อมต่อกับขั้วต่อ U, V และ W ตามที่แสดง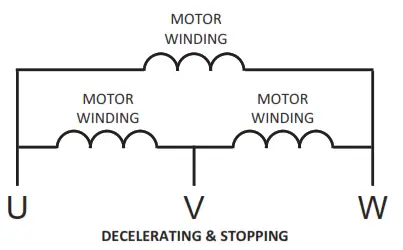
ลดความเร็วลงเหลือความเร็วต่ำสุดหรือเป็นศูนย์
สวิตช์ที่แสดงด้านล่างอาจใช้เพื่อลดความเร็วของมอเตอร์ให้มีความเร็วต่ำสุดได้ การเปิดสวิตช์ระหว่าง S3 และโพเทนชิออมิเตอร์จะชะลอมอเตอร์จากความเร็วที่ตั้งไว้ไปเป็นความเร็วต่ำสุดที่กำหนดโดยการตั้งค่าทริมพอตความเร็ว MIN หากตั้งหม้อทริมความเร็ว MIN SPEED เต็ม CCW มอเตอร์จะชะลอความเร็วลงเป็นศูนย์เมื่อเปิดสวิตช์ การตั้งค่าหม้อทริม DECEL TIME จะกำหนดอัตราที่ชุดขับจะชะลอความเร็ว เมื่อปิดสวิตช์ มอเตอร์จะเร่งความเร็วเพื่อตั้งค่าความเร็วตามอัตราที่กำหนดโดยหม้อทริม ACCEL TIME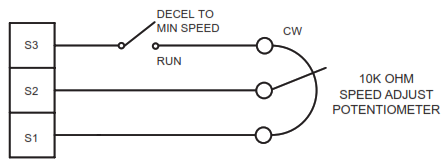
การสอบเทียบ
ความเร็วขั้นต่ำ (P1): การตั้งค่า MIN SPEED จะกำหนดความเร็วมอเตอร์ขั้นต่ำเมื่อโพเทนชิออมิเตอร์ปรับความเร็วหรือสัญญาณอะนาล็อกถูกตั้งค่าสำหรับความเร็วขั้นต่ำ (CCW เต็ม) ความเร็วเป็นศูนย์ที่ตั้งไว้จากโรงงาน หากต้องการปรับเทียบความเร็วต่ำสุด:
- ตั้งหม้อทริม MIN SPEED เต็ม CCW
- ตั้งค่าโพเทนชิออมิเตอร์ปรับความเร็วหรือสัญญาณอะนาล็อกสำหรับความเร็วต่ำสุด
- ปรับหม้อทริม MIN SPEED จนกระทั่งถึงความเร็วต่ำสุดที่ต้องการหรืออยู่ที่เกณฑ์การหมุน
ความเร็วสูงสุด (P2): การตั้งค่า MAX SPEED จะกำหนดความเร็วมอเตอร์สูงสุดเมื่อโพเทนยีโอมิเตอร์ปรับความเร็วหรือสัญญาณอะนาล็อกถูกตั้งค่าไว้ที่ความเร็วสูงสุด เป็นการตั้งค่าจากโรงงานสำหรับความเร็วสูงสุดของมอเตอร์ หากต้องการปรับเทียบความเร็วสูงสุด:
- ตั้งหม้อพัก MAX SPEED ให้เต็ม CCW
- ตั้งค่าโพเทนชิออมิเตอร์ปรับความเร็วหรือสัญญาณอะนาล็อกเพื่อให้ได้ความเร็วสูงสุด
- ปรับหม้อทริม MAX SPEED จนกระทั่งถึงความเร็วสูงสุดที่ต้องการ
ตรวจสอบการปรับความเร็วต่ำสุดและความเร็วสูงสุดที่ปรับเทียบใหม่เพื่อตรวจสอบว่ามอเตอร์ทำงานที่ความเร็วต่ำสุดและสูงสุดที่ต้องการ
การเร่งความเร็ว (P3): การตั้งค่า ACCEL TIME จะกำหนดเวลาที่มอเตอร์ใช้เพื่อ ramp ด้วยความเร็วที่สูงขึ้นโดยไม่คำนึงถึงทิศทาง หากต้องการปรับเทียบเวลา ACCEL ให้หมุนหม้อทริม ACCEL TIME CW เพื่อเพิ่มเวลาเร่งความเร็วไปข้างหน้า และหมุน CCW เพื่อลดเวลาเร่งความเร็วไปข้างหน้า
การชะลอตัว (P4): การตั้งค่า DECEL TIME จะกำหนดเวลาที่มอเตอร์ใช้เพื่อ ramp ไปที่ความเร็วต่ำลงเมื่อได้รับคำสั่งจากโพเทนชิออมิเตอร์หรือสัญญาณอะนาล็อก โดยไม่คำนึงถึงทิศทาง หากต้องการปรับเทียบเวลา DECEL ให้หมุนหม้อทริม DECEL TIME CW เพื่อเพิ่มเวลาลดความเร็ว
การชดเชยการลื่น (P5): การตั้งค่า SLIP COMP จะกำหนดระดับความเร็วของมอเตอร์ให้คงที่เมื่อโหลดของมอเตอร์เปลี่ยนแปลง ในการปรับเทียบ SLIP COMP:
- ตั้งหม้อพัก SLIP COMP ให้เต็ม CCW
- เพิ่มโพเทนชิออมิเตอร์ปรับความเร็วจนกระทั่งมอเตอร์ทำงานที่ความเร็วกลางโดยไม่มีโหลด 2. เครื่องวัดวามเร็วแบบมือถืออาจใช้วัดความเร็วของมอเตอร์ได้
- โหลดมอเตอร์จนถึงพิกัดกระแสโหลดเต็ม มอเตอร์ควรจะช้าลง
- ในขณะที่รักษาภาระบนมอเตอร์ไว้ ให้หมุนหม้อทริม SLIP COMP จนกระทั่งมอเตอร์ทำงานที่ 4 ความเร็วที่วัดได้ในขั้นตอนที่ 2 หากมอเตอร์สั่น (ชดเชยมากเกินไป) หม้อทริม SLIP COMP 4 อาจตั้งไว้สูงเกินไป (CW) หมุนหม้อทริม SLIP COMP CCW เพื่อทำให้มอเตอร์ทรงตัว
- ยกเลิกการโหลดมอเตอร์
เล่มที่tagอีบูสต์ (P6): วอลุ่มTAGการตั้งค่า E BOOST จะเพิ่มแรงบิดของมอเตอร์ที่ความเร็วต่ำ การตั้งค่าขั้นต่ำนั้นเพียงพอสำหรับแอปพลิเคชันส่วนใหญ่ และไม่จำเป็นต้องปรับเปลี่ยน หากมอเตอร์หยุดทำงานหรือทำงานผิดปกติที่ความเร็วต่ำมาก (ต่ำกว่า 10 Hz) อาจจำเป็นต้องปรับหม้อพักเสริม
หากต้องการปรับเทียบ VOLTAGอีบูสต์:
- เดินมอเตอร์ด้วยความเร็ว/ความถี่ต่อเนื่องต่ำสุดที่ต้องการ
- เพิ่มปริมาณโวลTAGหม้อทริม E BOOST จนกระทั่งมอเตอร์ทำงานได้อย่างราบรื่น การทำงานต่อเนื่องเกินพิกัดกระแสของมอเตอร์อาจทำให้มอเตอร์เสียหายได้
แรงบิด (P7): การตั้งค่า TQ LIMIT จะกำหนดแรงบิดสูงสุดสำหรับการเร่งความเร็วและขับเคลื่อนมอเตอร์
เพื่อปรับเทียบ TQ LIMIT
- เมื่อตัดกระแสไฟออกจากชุดขับเคลื่อน ให้เชื่อมต่อแอมป์มิเตอร์ RMS แบบอนุกรมกับหนึ่งในสายมอเตอร์
- หมุนหม้อตัดแต่ง TQ LIMIT ไปที่ CW เต็ม จ่ายไฟและปรับความเร็วมอเตอร์ให้เป็นความเร็วเต็มพิกัด
- โหลดมอเตอร์เพื่อดึงกระแส RMS ที่กำหนดไว้ก่อนหน้านี้
- ค่อยๆ หมุนหม้อทริม CCW ของ TQ LIMIT จนกระทั่งไฟ LED สีแดงเริ่มกะพริบ จากนั้นหมุนหม้อพักอีกเล็กน้อยเพื่อเริ่มลดขนาดมอเตอร์ ampบนแอมป์มิเตอร์ RMS
ระดับเบรคtagอี (P8): ปริมาณเบรกtage กำหนดปริมาตรtagระดับที่ชุดขับจะจ่ายกระแสให้กับระบบเบรกแบบฉีด DC ยิ่งปริมาณสูงเท่าไรtage ยิ่งกระแสมากขึ้นจะเป็นมอเตอร์ การเบรกแบบฉีด DC จะเกิดขึ้นในโหมดเบรกเท่านั้น (สวิตช์ดิป 3 = เปิด)
หมดเวลาเบรก (P9): การหมดเวลาเบรกจะกำหนดระยะเวลาที่กระแสไฟเบรกแบบฉีด DC จะใช้เมื่อเบรก การเบรกแบบฉีด DC จะเกิดขึ้นในโหมดเบรกเท่านั้น (สวิตช์ดิป 3 = เปิด) ![]()
เอกสาร / แหล่งข้อมูล
 |
Minarik MDVF03 ไดรฟ์ความถี่ตัวแปรที่ใช้ไมโครโปรเซสเซอร์แบบเปิดแชสซี [พีดีเอฟ] คู่มือเจ้าของ MDVF03 ไดรฟ์ความถี่ตัวแปรที่ใช้ไมโครโปรเซสเซอร์แบบเปิดแชสซี, MDVF03, ไดรฟ์ความถี่ตัวแปรที่ใช้ไมโครโปรเซสเซอร์แบบเปิดแชสซี, ไดรฟ์ความถี่ตัวแปรที่ใช้ไมโครโปรเซสเซอร์, ไดรฟ์ความถี่ตัวแปร, ไดรฟ์ความถี่, ไดรฟ์ |



