![]() Merek Elektronik Kontrol Amerika
Merek Elektronik Kontrol Amerika
MDVF03
Open Chassis berbasis Mikroprosesor
Penggerak Frekuensi Variabel dengan Isolasi untuk Motor AC Satu Fasa dan Tiga Fasa
Spesifikasi
| Model | Baris Voltage (vac) | Vol motortage (vac) | Arus Motor Kontinu (Amps) | Kisaran Tenaga Kuda Motor |
| MDVF03-D230-PCM | 115 atau 230 | 115 230 | 3.0* | 1/16 – 3/8 1/8 – 3/4 |
* Saat dipasang untuk memungkinkan aliran udara ke atas melintasi pelat.
* Turunkan tarif ke 2.5 amps saat dipasang di konfigurasi lain.
Saluran AC Voltage……………115 / 230 VAC ± 10%, 50/60 Hz, fase tunggal
Arus Saluran AC dengan saluran 115 VAC voltage dengan motor 115V………………………………6.7 amps
Arus Saluran AC dengan saluran 115 VAC voltage dengan motor 230V……………………………….10.7 amps
Arus Saluran AC dengan saluran 230 VAC voltage dengan motor 230V………………………………6.7 amps
Motor AC Voltage ………………………………………115 atau 230 VAC, 50/60 Hz, fase tunggal atau tiga
Kemampuan Overload………………………………………………………..200% (2x) selama 1 menit
Frekuensi Pembawa Standar……………………………………………………………… 1.6 atau 16 kHz
Rentang Frekuensi Output……………………………………………….0 – 120 Hz
Injeksi DC Voltage……………………………………………………………… 0 – 27 VDC
Injeksi DC Voltage Waktu……………………………………………………… 0 – 5 detik
Rentang Waktu Percepatan (0 – 60 Hz)…………………………………………..0.5 – 12 detik
Rentang Waktu Deselerasi (60 – 0 Hz)………………………………………….0.5 – 12 detik
Rentang Sinyal Input Analog………………………………………………..0 ± 5 VDC, 0 ± 10 VDC, 4 – 20 mA
Impedansi Input (S1 ke S2)……………………………………………………………..>50K ohm
Getaran Maksimum (0 – 50 Hz, >50 Hz)……………………………… 0.5G, maksimum 0.1G
Kisaran Suhu Udara Sekitar………………………………32°F – 104°F (0°C – 40°C)
Berat……………………………………………………………………………………….1.20 lbs (0.54 kilogram)
Sertifikasi Keselamatan………………………………………..cULus Listed, UL 61800-5-1, File #E132235
Peringatan Keamanan
BACA SEMUA PERINGATAN KESELAMATAN SEBELUM MEMASANG PERALATAN INI
- JANGAN MEMASANG, MELEPAS, ATAU MENGALIHKAN PERALATAN INI DENGAN DAYA YANG TERTERA. Mintalah teknisi listrik yang memenuhi syarat untuk memasang, menyesuaikan, dan memperbaiki peralatan ini. Ikuti Kode Kelistrikan Nasional dan semua kode kelistrikan dan keselamatan lainnya yang berlaku, termasuk ketentuan Undang-Undang Keselamatan dan Kesehatan Kerja (OSHA), saat memasang peralatan.
- Potensi sirkuit berada pada 115 atau 230 VAC di atas tanah bumi. Hindari kontak langsung dengan papan sirkuit tercetak atau dengan elemen sirkuit untuk mencegah risiko cedera serius atau kematian. Gunakan obeng non-logam untuk menyetel pot trim kalibrasi. Gunakan alat pelindung diri yang disetujui dan peralatan berinsulasi jika bekerja pada drive ini dengan aliran listrik.
- Kurangi kemungkinan kebakaran listrik, sengatan listrik, atau ledakan dengan menggunakan teknik pengardean yang tepat, proteksi arus berlebih, proteksi termal, dan penutup. Ikuti prosedur pemeliharaan suara.
- Minarik Drives sangat menyarankan pemasangan sakelar daya utama di jalur voltagmasukan. Kontak sakelar harus terukur untuk 250 VAC dan 200% arus papan nama motor.
- Melepaskan saluran listrik AC adalah satu-satunya metode yang dapat diterima untuk penghentian darurat. Jangan menggunakan pengereman injeksi DC, mengurangi kecepatan hingga kecepatan minimum, atau meluncur hingga berhenti untuk berhenti darurat. Mereka mungkin tidak menghentikan drive yang tidak berfungsi.
- Memulai dan menghentikan jalur (menerapkan dan menghapus jalur AC voltage) direkomendasikan untuk start dan stop drive yang jarang saja. Pengereman regeneratif, melambat ke kecepatan minimum, atau meluncur ke berhenti direkomendasikan untuk start dan stop yang sering. Start dan stop yang sering dapat menghasilkan torsi tinggi. Ini dapat menyebabkan kerusakan pada motor.
- Jangan lepaskan kabel motor apa pun dari drive kecuali jika daya dilepas atau drive dinonaktifkan. Membuka salah satu lead saat drive sedang berjalan dapat merusak drive.
- Dalam situasi apa pun, kabel level daya dan logika tidak boleh digabungkan menjadi satu.
- Pastikan tab potensiometer tidak menyentuh badan potensiometer. Grounding input akan menyebabkan kerusakan pada drive.
- Hanya hubungkan ke terminal L2-DBL jika menggunakan saluran 115 VAC dengan motor dengan arus lebih tinggi dari 120 VAC.
- Perhatian harus diberikan saat mengoperasikan motor berpendingin kipas pada kecepatan rendah karena kipasnya mungkin tidak mengalirkan udara yang cukup untuk mendinginkan motor dengan benar. Minarik Drives merekomendasikan motor "inverter-duty" saat rentang kecepatan melebihi 10:1.
- Produk ini tidak memiliki perlindungan beban berlebih motor solid state internal. Itu tidak mengandung perlindungan kelebihan beban yang peka terhadap kecepatan, retensi memori termal, atau ketentuan untuk menerima dan menindaklanjuti sinyal dari perangkat jarak jauh untuk perlindungan suhu berlebih. Jika pelindung motor diperlukan dalam produk penggunaan akhir, perlu dilengkapi dengan perlengkapan tambahan sesuai dengan standar NEC.
Ukuran
 Instalasi
Instalasi
Pemasangan
- Komponen penggerak sensitif terhadap pelepasan muatan listrik statis. Hindari kontak langsung dengan papan sirkuit. Pegang drive hanya pada pelatnya.
- Lindungi drive dari kotoran, kelembapan, dan kontak yang tidak disengaja.
- Sediakan ruang yang cukup untuk akses ke terminal dan trim pot kalibrasi.
- Pasang drive jauh dari sumber panas. Operasikan konverter dalam kisaran suhu pengoperasian udara sekitar yang ditentukan.
- Cegah koneksi longgar dengan menghindari getaran drive yang berlebihan.
- Pasang drive dengan papannya di bidang horizontal atau vertikal. Enam lubang 0.17″ (4 mm) pada pelat menerima sekrup pan head #8. Jika dipasang secara horizontal, drive harus diturunkan menjadi 2.5 amps.
- Pelat harus diardekan ke bumi.
Pengkabelan: Gunakan kabel 16 – 18 AWG 75°C untuk saluran AC (L1, L2, L2-DBL) dan kabel motor (U/A2, V/A1, W). Gunakan kabel 18 – 24 AWG untuk kabel logika (COM, DIR, EN, Sl, S2, S3). Ikuti standar NEC untuk perkabelan. Torsi pengencang untuk terminal daya TB502 di papan bawah adalah 9 lb-in (1.0 Nm). Torsi pengencangan untuk terminal logika TB501 dan TB502 di papan atas adalah 1.77 lb-in (0.2 Nm).
Pedoman Perisai: Sebagai aturan umum, disarankan untuk melindungi semua konduktor. Jika tidak praktis untuk melindungi konduktor daya, disarankan untuk melindungi semua lead level logika. Jika melindungi lead level logika tidak praktis, pengguna harus memutar semua lead logika dengan diri mereka sendiri untuk meminimalkan kebisingan yang diinduksi. Mungkin perlu membumikan kabel berpelindung. Jika kebisingan dihasilkan oleh perangkat selain drive, ardekan pelindung di ujung drive. Jika kebisingan dihasilkan oleh drive, ardekan pelindung di ujung jauh dari drive. Jangan membumikan kedua ujung pelindung.
Peringkat Arus Sirkuit Pendek (SCCR): Drive ini cocok untuk digunakan pada sirkuit yang mampu menghasilkan tidak lebih dari 5,000 rms Simetris Ampada, maksimum 115/230 volt.
Perlindungan Sirkuit Cabang: Produk ini memiliki perlindungan sirkuit solid state integral, yang tidak memberikan perlindungan sirkuit cabang. Proteksi sirkuit bercabang harus disediakan sesuai dengan Kode Kelistrikan Nasional dan kode lokal tambahan lainnya. Daftar UL mensyaratkan penggunaan sekering Kelas J, Kelas CC, atau Kelas T dengan daya minimal 230 VAC. Direkomendasikan untuk menggunakan sekering dengan nilai 200% dari arus motor maksimum, kecuali jika menggunakan penggerak dalam operasi penggandaan, dalam hal ini sekering harus diberi nilai 400% dari arus motor maksimum. Sambungkan kaki HOT saluran AC saat menggunakan 115 VAC dan kedua saluran saat menggunakan 230 VAC.
DAYA (PAPAN BAWAH)
Masukan Saluran AC
Hubungkan jalur AC voltage ke terminal L1 dan L2. Jika mode pengganda akan digunakan (keluaran 230 VAC dengan masukan 115 VAC), hubungkan saluran AC vol.tage ke terminal L1 dan L2-DBL. Jangan membuat sambungan apa pun ke L2-DBL jika menggunakan sumber saluran 230 VAC.
Motor
Sambungkan kabel motor ke terminal U/A2, V/A1, dan W. Jika motor tidak berputar ke arah yang diinginkan, matikan drive dan balikkan dua dari tiga sambungan ini.
LOGIKA (PAPAN ATAS)
Potensiometer Kecepatan
Gunakan potensiometer 10K ohm, 1/4 W untuk kontrol kecepatan. Hubungkan ujung potensiometer berlawanan arah jarum jam ke S1, penghapus ke S2, dan ujung searah jarum jam ke S3. Jika potensiometer bekerja terbalik dari fungsionalitas yang diinginkan, (yaitu untuk meningkatkan kecepatan motor, Anda harus memutar kabel potensiometer berlawanan arah jarum jam), matikan drive dan tukar koneksi S1 dan S3.
Rentang Sinyal Input Analog
Alih-alih menggunakan potensiometer, drive dapat disambungkan untuk mengikuti sinyal input analog. Sinyal input ini dapat berupa voltage (0 ± 5, 0 ± 10 VDC) atau arus (4- 20 mA). Isolasi bawaan memungkinkan sinyal input di-ground atau ungrounded (floating). Hubungkan sinyal common/negatif (-) ke S1 dan sinyal referensi/positif (+) ke S2. Lihat bagian Startup untuk pengaturan jumper terkait.
Memungkinkan
Terminal pendek EN dan COM untuk mempercepat motor untuk mengatur kecepatan. Buka terminal ENABLE untuk meluncurkan atau mengerem motor ke kecepatan nol. Lihat DIP Switch 3 di bagian Statup untuk pengaturan jumper. Jika tidak ada sakelar ENABLE yang diinginkan, pasang jumper antara terminal COM dan EN. Jangan gunakan pengaktifan untuk penghentian darurat.
Arah
Terminal pendek DIR dan COM untuk mengubah arah motor. Jika tidak ada sakelar arah yang diinginkan, biarkan koneksi ini terbuka.
Rintisan
PILIH SAKELAR
Pilih Beralih (SW501)
Dip Switch 1: ON – Output 115 VAC – Mengatur output 115 VAC dengan input 115 atau 230 VAC.
OFF – Output 230 VAC – Mengatur output 230 VAC dengan input 115 atau 230 VAC.
Celupkan Sakelar 1:
Dip Switch 2: ON – 50 Hz – Mengatur frekuensi dasar 50 Hz pada output.
OFF – 60 Hz – Mengatur frekuensi dasar 50 Hz pada output.
Celupkan Sakelar 1:
Dip Switch 3: ON – Brake Mode – Membuka switch ENABLE akan mengerem motor ke kecepatan nol
Pengereman Injeksi DC tanpa menerapkan desel ramp.
Celupkan Sakelar 1:
OFF – Enable Mode – Membuka sakelar ENABLE akan membuat motor berhenti.
Dip Switch 4: ON – Frekuensi Pembawa 1.6 kHz (Terdengar, tetapi mencegah gangguan GFI).
MATI – Frekuensi Pembawa 16 kHz (Tidak terdengar, tetapi dapat menyebabkan gangguan GFI).
Celupkan Sakelar 1:

RINTISAN
– Pastikan tidak ada bahan konduktif asing pada papan sirkuit tercetak.
– Pastikan semua sakelar dan jumper diatur dengan benar.
- Putar potensiometer penyesuaian kecepatan penuh berlawanan arah jarum jam (CCW) atau setel sinyal input analog ke 1. minimum.
- Terapkan jalur AC voltage.
- Tutup sakelar aktifkan dan pastikan LED Daya hijau (IL1) jika berkedip.
- Perlahan-lahan tingkatkan kecepatan sesuaikan potensiometer searah jarum jam (CW) atau tingkatkan sinyal input analog. Motor harus berakselerasi saat potensiometer diputar CW atau saat sinyal analog dinaikkan. Lanjutkan hingga kecepatan yang diinginkan tercapai.
- Hapus saluran AC voltage dari drive untuk meluncurkan motor hingga berhenti.
lampu LED
Daya (IL1): LED hijau menyala saat saluran AC voltage diterapkan ke drive, tetapi drive dinonaktifkan. Itu berkedip setiap kali saluran AC voltage diterapkan ke drive dan drive diaktifkan.
Status (IL2): LED merah menyala saat dalam batas arus atau berkedip mengikuti kode kesalahan:
2 Berkedip: Undervoltage – BUS DC internal voltage jatuh terlalu rendah.
3 Berkedip: Overvoltage – BUS DC internal voltage naik terlalu tinggi.
4 Berkedip: Batas Arus atau Hubungan Pendek – Konverter berada dalam batas arus atau mendeteksi korsleting pada motor.
5 Flashes: Overtemperature Shut Down – Suhu Drive telah mencapai suhu kritis.
6 Berkedip: Peringatan Suhu Berlebih – Suhu drive mendekati suhu kritis. Arus motor maksimum dikurangi secara bertahap saat suhu drive naik.
Hak Cipta 2018 oleh American Control Electronics® – Semua hak dilindungi undang-undang. Tidak ada bagian dari dokumen ini yang boleh direproduksi atau ditransmisikan ulang dalam bentuk apa pun tanpa izin tertulis dari American Control Electronics®. Informasi dan data teknis dalam dokumen ini dapat berubah tanpa pemberitahuan. American Control Electronics® tidak memberikan jaminan apa pun sehubungan dengan materi ini, termasuk, namun tidak terbatas pada, jaminan tersirat tentang kelayakan untuk diperdagangkan dan kesesuaian untuk tujuan tertentu. American Control Electronics® tidak bertanggung jawab atas kesalahan apa pun yang mungkin muncul dalam dokumen ini dan tidak berkomitmen untuk memperbarui atau terus memperbarui informasi dalam dokumen ini.
Operasi
JENIS MOTOR
Jenis motor yang dapat diterima adalah induksi 3 fasa, kapasitor split permanen (PSC), kutub berarsir, dan sinkron AC. Tidak disarankan untuk menggunakan motor tipe kapasitor-start.
Seri PMF dirancang untuk menampilkan frekuensi yang bervariasi dan vol proporsionaltage untuk memvariasikan kecepatan motor satu fasa. Namun, motor fase tunggal dioptimalkan untuk operasi kecepatan penuh dan mungkin tidak beroperasi dengan torsi yang diharapkan pada kecepatan selain kecepatan pengenal penuh. Karena PMF memiliki kemampuan untuk mengubah masukan 115 VAC satu fasa menjadi keluaran 230 VAC tiga fasa, disarankan untuk menggunakan motor tiga fasa dalam aplikasi baru.
KONEKSI MOTOR
Operasi Fase Tunggal – Non-pembalikan
Untuk operasi satu fasa, sambungkan motor seperti yang ditunjukkan pada gambar di bawah ini. Pastikan bahwa kapasitor yang telah dipasangi kabel dan koil motor terkait terhubung ke terminal U dan V seperti yang ditunjukkan. Koneksi ini mungkin internal jika menggunakan motor 2 kabel. Jika motor memiliki tiga kabel, Anda harus membuat sambungan ini sendiri. Operasi Fase Tunggal – Membalikkan
Operasi Fase Tunggal – Membalikkan
Lepas kapasitor dan sambungkan motor seperti yang ditunjukkan pada gambar di bawah ini. Meskipun memungkinkan pembalikan keadaan padat, skema pengkabelan ini dapat mengakibatkan pengoperasian motor yang kurang optimal. Bergantung pada konstruksi motor dan persyaratan aplikasi, motor mungkin perlu diturunkan dayanya.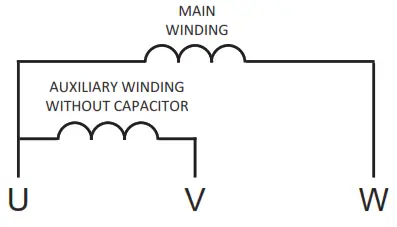
Operasi Tiga Fase
Untuk operasi tiga fasa, sambungkan motor seperti yang ditunjukkan pada gambar di bawah ini. Hubungkan ke terminal U, V, dan W seperti yang ditunjukkan.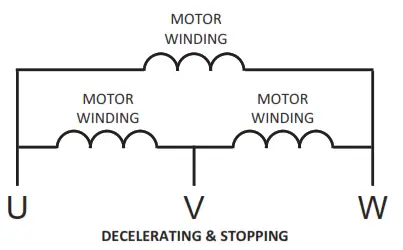
Deselerasi ke Kecepatan Minimum atau Nol
Sakelar yang ditunjukkan di bawah ini dapat digunakan untuk memperlambat motor ke kecepatan minimum. Membuka sakelar antara S3 dan potensiometer akan memperlambat motor dari kecepatan yang disetel ke kecepatan minimum yang ditentukan oleh setelan trim pot MIN SPEED. Jika trim pot MIN SPEED disetel CCW penuh, motor akan melambat ke kecepatan nol saat sakelar dibuka. Pengaturan pot trim DECEL TIME menentukan tingkat perlambatan drive. Dengan menutup sakelar, motor berakselerasi untuk menyetel kecepatan pada laju yang ditentukan oleh trim pot ACCEL TIME.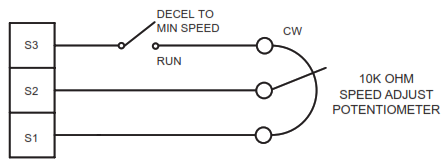
Kalibrasi
Kecepatan Minimum (P1): Pengaturan KECEPATAN MIN menentukan kecepatan motor minimum saat potensiometer penyesuaian kecepatan atau sinyal analog diatur ke kecepatan minimum (CCW penuh). Sudah diatur pabrik untuk kecepatan nol. Untuk mengkalibrasi KECEPATAN MIN:
- Setel pot trim MIN SPEED CCW penuh.
- Atur potensiometer penyesuaian kecepatan atau sinyal analog untuk kecepatan minimum.
- Sesuaikan trim pot MIN SPEED sampai kecepatan minimum yang diinginkan tercapai atau tepat di ambang putaran.
Kecepatan Maksimum (P2): Pengaturan MAX SPEED menentukan kecepatan motor maksimum saat potensiometer penyesuaian kecepatan atau sinyal analog diatur untuk kecepatan maksimum. Ini adalah pengaturan pabrik untuk kecepatan pengenal motor maksimum. Untuk mengkalibrasi KECEPATAN MAX:
- Atur panci pemangkas KECEPATAN MAX CCW penuh.
- Atur potensiometer penyesuaian kecepatan atau sinyal analog untuk kecepatan maksimum.
- Sesuaikan trim pot KECEPATAN MAX hingga kecepatan maksimum yang diinginkan tercapai.
Periksa penyesuaian MIN SPEED dan MAX SPEED setelah kalibrasi ulang untuk memverifikasi bahwa motor berjalan pada kecepatan minimum dan maksimum yang diinginkan.
Percepatan (P3): Pengaturan ACCEL TIME menentukan waktu yang dibutuhkan motor untuk ramp ke kecepatan yang lebih tinggi terlepas dari arah. Untuk mengkalibrasi WAKTU ACCEL, putar pot trim ACCEL TIME CW untuk menambah waktu akselerasi maju dan CCW untuk mengurangi waktu akselerasi maju.
Deselerasi (P4): Pengaturan DECEL TIME menentukan waktu yang dibutuhkan motor untuk ramp ke kecepatan yang lebih rendah saat diperintahkan oleh potensiometer atau sinyal analog, terlepas dari arahnya. Untuk mengkalibrasi DECEL TIME, putar trim pot DECEL TIME CW untuk menambah waktu deselerasi.
Slip Compensation (P5): Pengaturan SLIP COMP menentukan sejauh mana kecepatan motor dipertahankan konstan saat beban motor berubah. Untuk mengkalibrasi SLIP COMP:
- Atur pot trim SLIP COMP full CCW.
- Tingkatkan potensiometer penyesuaian kecepatan hingga motor berjalan pada kecepatan sedang tanpa beban. Tachometer genggam 2. dapat digunakan untuk mengukur kecepatan motor.
- Muatkan motor ke peringkat arus beban penuhnya. Motor harus melambat.
- Sambil menahan beban pada motor, putar pot trim SLIP COMP sampai motor berjalan pada 4. kecepatan yang diukur pada langkah 2. Jika motor berosilasi (kompensasi berlebih), pot trim 4. SLIP COMP mungkin disetel terlalu tinggi (CW). Putar pot trim SLIP COMP CCW untuk menstabilkan motor.
- Bongkar motor.
Jil.tage Peningkatan (P6): VOLTAGPengaturan E BOOST meningkatkan torsi motor pada kecepatan rendah. Pengaturan minimum cukup untuk sebagian besar aplikasi dan tidak perlu disesuaikan. Jika motor mati atau berjalan tidak menentu pada kecepatan yang sangat rendah (di bawah 10 Hz), pot trim penambah mungkin perlu penyesuaian.
Untuk mengkalibrasi VOLTAGE MENINGKATKAN:
- Jalankan motor pada kecepatan/frekuensi kontinu terendah yang diperlukan.
- Tingkatkan VOLTAGE BOOST trim pot hingga motor berjalan mulus. Pengoperasian terus-menerus di luar batas arus motor dapat merusak motor.
Torsi (P7): Pengaturan TQ LIMIT menentukan torsi maksimum untuk mempercepat dan menggerakkan motor.
Untuk mengkalibrasi LIMIT TQ.
- Dengan daya terputus dari drive, sambungkan ammeter RMS secara seri dengan salah satu kabel motor.
- Putar pot trim TQ LIMIT ke CW penuh. Terapkan daya dan sesuaikan kecepatan motor ke kecepatan pengenal penuh.
- Bebankan motor sehingga menarik arus RMS yang telah ditentukan sebelumnya.
- Putar perlahan TQ LIMIT trim pot CCW hingga LED merah mulai berkedip. Kemudian putar trim pot sedikit lagi sehingga baru mulai menurunkan motor amps pada ammeter RMS.
Rem Voltagdan (P8): Rem voltage menentukan voltagtingkat di mana drive akan menerapkan arus untuk Pengereman Injeksi DC. Semakin tinggi voltage, semakin banyak arus motor. Pengereman Injeksi DC hanya akan terjadi pada Mode Pengereman (Dip Switch 3 = ON).
Waktu Habis Rem (P9): BRAKE TIME-OUT menentukan berapa lama arus Pengereman Injeksi DC akan diterapkan saat pengereman. Pengereman Injeksi DC hanya akan terjadi pada Mode Pengereman (Dip Switch 3 = ON). ![]()
Dokumen / Sumber Daya
 |
Minarik MDVF03 Penggerak Frekuensi Variabel Berbasis Mikroprosesor Chassis Terbuka [Bahasa Indonesia:] Panduan Pemilik MDVF03 Penggerak Frekuensi Variabel Berbasis Mikroprosesor Sasis Terbuka, MDVF03, Penggerak Frekuensi Variabel Berbasis Mikroprosesor Sasis Terbuka, Penggerak Frekuensi Variabel Berbasis Mikroprosesor, Penggerak Frekuensi Variabel, Penggerak Frekuensi, Penggerak |



