![]() 미국 제어 전자 브랜드
미국 제어 전자 브랜드
MDVF03
Open Chassis 마이크로프로세서 기반
단상 및 XNUMX상 AC 모터용 절연 기능이 있는 가변 주파수 드라이브
명세서
| 모델 | 라인 Voltag전자(VAC) | 모터볼tag전자(VAC) | 연속 모터 전류(Amps) | 모터 마력 범위 |
| MDVF03-D230-PCM | 115 또는 230 | 115 230 | 3.0* | 1/16 – 3/8 1/8 – 3/4 |
* 플레이트를 가로질러 위쪽으로 기류가 흐르도록 장착된 경우.
* 2.5로 감소 amp다른 구성으로 장착된 경우.
AC 라인 Voltag전자………115/230VAC ± 10%, 50/60Hz, 단상
115VAC 라인 볼륨의 AC 라인 전류tage 115V 모터로 ..................................................6.7 amps
115VAC 라인 볼륨의 AC 라인 전류tage 230V 모터로 ..................................10.7 amps
230VAC 라인 볼륨의 AC 라인 전류tage 230V 모터로 ..................................................6.7 amps
AC 모터 볼륨tage .........................................................115 또는 230VAC, 50/60Hz, 단상 또는 XNUMX상
과부하 기능 ....................................................................................200분 동안 2%(1x)
표준 반송파 주파수 ..................................................................1.6 또는 16kHz
출력 주파수 범위 ..................................................0 – 120Hz
DC 주입량tag전자 ..................................................................................0 – 27 VDC
DC 주입량tage 시간 ..................................................................0 – 5초
가속 시간 범위(0 – 60Hz)…………………………0.5 – 12초
감속 시간 범위(60 – 0 Hz) ..................................................0.5 – 12초
아날로그 입력 신호 범위 ..................................................................0 ± 5 VDC, 0 ± 10 VDC, 4 – 20 mA
입력 임피던스(S1 ~ S2) ....................................................................................>50K 옴
최대 진동(0 – 50Hz, >50Hz)……………………0.5G, 최대 0.1G
주변 공기 온도 범위 .................................................. 32°F – 104°F (0°C – 40°C)
무게 ..................................................................................................................................1.20파운드(0.54킬로그램)
안전 인증 ....................................................cULus 등재, UL 61800-5-1, File # E132235
안전 경고
이 장비를 설치하기 전에 모든 안전 경고를 읽으십시오.
- 전원이 공급된 상태에서 이 장비를 설치, 제거 또는 재배선하지 마십시오. 자격을 갖춘 전기 기술자에게 이 장비를 설치, 조정 및 서비스하도록 하십시오. 장비를 설치할 때 직업 안전 및 건강법(OSHA) 조항을 포함하여 국가 전기 규정 및 기타 적용 가능한 모든 전기 및 안전 규정을 따르십시오.
- 회로 전위는 접지 위의 115 또는 230VAC입니다. 심각한 부상이나 사망의 위험을 방지하기 위해 인쇄 회로 기판이나 회로 요소에 직접 접촉하지 마십시오. 보정 트림 포트를 조정하려면 비금속 스크루드라이버를 사용하십시오. 전원이 공급된 드라이브에서 작업하는 경우 승인된 개인 보호 장비와 절연 도구를 사용하십시오.
- 적절한 접지 기술, 과전류 보호, 열 보호 및 인클로저를 사용하여 전기 화재, 충격 또는 폭발 가능성을 줄입니다. 건전한 유지 관리 절차를 따르십시오.
- Minarik Drives는 라인 볼륨에 마스터 전원 스위치 설치를 강력히 권장합니다.tag전자 입력. 스위치 접점은 250VAC 및 모터 명판 전류의 200% 정격이어야 합니다.
- AC 전원을 제거하는 것만이 비상 정지에 허용되는 유일한 방법입니다. 직류제동, 최저속도감속, 긴급정지를 위한 관성정지 등을 사용하지 마십시오. 오작동하는 드라이브를 중지할 수 없습니다.
- 라인 시작 및 정지(AC 라인 적용 및 제거 voltage) 드물게 드라이브를 시작하고 중지하는 경우에만 권장됩니다. 잦은 시동과 정지에는 회생 제동, 최저 속도로 감속 또는 관성 정지를 권장합니다. 빈번한 시동 및 정지는 높은 토크를 생성할 수 있습니다. 모터가 손상될 수 있습니다.
- 전원이 제거되거나 드라이브가 중단되지 않는 한 드라이브에서 모터 리드를 분리하지 마십시오. 사용할 수 없습니다. 드라이브가 작동하는 동안 하나의 리드를 열면 드라이브가 손상될 수 있습니다.
- 어떤 상황에서도 전원 및 로직 레벨 배선을 함께 묶어서는 안 됩니다.
- 전위차계 탭이 전위차계 본체와 접촉하지 않도록 하십시오. 입력을 접지하면 드라이브가 손상될 수 있습니다.
- 모터 정격이 2VAC보다 높은 115VAC 라인을 사용하는 경우에만 단자 L120-DBL에 연결하십시오.
- 팬 냉각식 모터를 저속에서 작동할 때는 팬이 모터를 적절하게 냉각시키기에 충분한 공기를 이동시키지 못할 수 있으므로 주의해야 합니다. Minarik Drives는 속도 범위가 10:1을 초과할 때 "인버터 듀티" 모터를 권장합니다.
- 이 제품에는 내부 솔리드 스테이트 모터 과부하 보호 기능이 없습니다. 속도에 민감한 과부하 보호, 열 메모리 보존 또는 과열 보호를 위해 원격 장치의 신호를 수신하고 이에 따라 조치를 취하는 조항이 포함되어 있지 않습니다. 최종 사용 제품에 모터 보호가 필요한 경우 NEC 표준에 따라 추가 장비로 제공해야 합니다.
치수
 설치
설치
설치
- 드라이브 부품은 정전기 방전에 민감합니다. 회로 기판과의 직접적인 접촉을 피하십시오. 플레이트로만 드라이브를 잡습니다.
- 먼지, 습기 및 우발적인 접촉으로부터 드라이브를 보호하십시오.
- 단자 및 교정 트림 포트에 접근할 수 있는 충분한 공간을 제공하십시오.
- 드라이브를 열원에서 멀리 장착하십시오. 지정된 주변 공기 작동 온도 범위 내에서 드라이브를 작동하십시오.
- 드라이브의 과도한 진동을 피하여 느슨한 연결을 방지하십시오.
- 보드와 함께 드라이브를 수평 또는 수직면에 장착하십시오. 플레이트에 있는 0.17개의 4"(8mm) 구멍에는 #2.5 팬 헤드 나사를 사용할 수 있습니다. 수평으로 장착된 경우 드라이브는 XNUMX로 감소되어야 합니다. amps.
- 플레이트는 접지되어야 합니다.
배선: AC 라인(L16, L18, L75-DBL) 및 모터(U/A1, V/A2, W) 배선에는 2 – 2 AWG 1°C 와이어를 사용하십시오. 로직 배선(COM, DIR, EN, Sl, S18, S24)에는 2 – 3 AWG 와이어를 사용하십시오. 배선은 NEC 표준을 따릅니다. 하단 보드의 전원 단자 TB502에 대한 조임 토크는 9lb-in(1.0Nm)입니다. 상단 보드의 논리 단자 TB501 및 TB502의 조임 토크는 1.77lb-in(0.2Nm)입니다.
차폐 지침: 원칙적으로 모든 도체를 차폐하는 것이 좋습니다. 전원 컨덕터를 차폐하는 것이 실용적이지 않은 경우 모든 로직 레벨 리드를 차폐하는 것이 좋습니다. 로직 레벨 리드의 차폐가 실용적이지 않은 경우 사용자는 유도 노이즈를 최소화하기 위해 모든 로직 리드를 자체적으로 꼬아야 합니다. 차폐 케이블을 접지해야 할 수도 있습니다. 드라이브 이외의 장치에서 노이즈가 발생하는 경우 드라이브 끝의 실드를 접지하십시오. 드라이브에서 노이즈가 발생하는 경우 드라이브에서 먼 쪽 끝의 실드를 접지하십시오. 실드의 양쪽 끝을 접지하지 마십시오.
단락 전류 정격(SCCR): 이 드라이브는 5,000rms 이하를 전달할 수 있는 회로에서 사용하기에 적합합니다. Amperes, 최대 115/230볼트.
분기 회로 보호: 이 제품에는 분기 회로 보호 기능을 제공하지 않는 일체형 솔리드 스테이트 회로 보호 기능이 있습니다. 분기 회로 보호는 National Electrical Code 및 추가 지역 규정에 따라 제공되어야 합니다. UL Listing에서는 최소 230VAC 등급의 J, CC 또는 T 등급 퓨즈를 사용해야 합니다. 최대 모터 전류의 200% 정격 퓨즈를 사용하는 것이 좋습니다. 더블러 작동에서 드라이브를 사용하지 않는 한 퓨즈는 최대 모터 전류의 400% 정격이어야 합니다. 115VAC를 사용할 때는 AC 라인의 HOT 레그를, 230VAC를 사용할 때는 두 라인을 모두 퓨즈로 연결하십시오.
전원(하단 보드)
AC 라인 입력
AC 라인 볼륨 연결tage 단자 L1 및 L2에. 더블러 모드를 사용하려면(230VAC 출력과 115VAC 입력) AC 라인 볼륨을 연결합니다.tage 단자 L1 및 L2-DBL에. 2VAC 라인 소스를 사용하는 경우 L230-DBL에 연결하지 마십시오.
모터
모터 리드를 단자 U/A2, V/A1 및 W에 연결합니다. 모터가 원하는 방향으로 회전하지 않으면 드라이브의 전원을 끄고 이 세 연결 중 두 연결을 반대로 합니다.
로직(상단 보드)
속도 전위차계
속도 제어를 위해 10K 옴, 1/4W 전위차계를 사용하십시오. 전위차계의 시계 반대 방향 끝을 S1에, 와이퍼를 S2에, 시계 방향 끝을 S3에 연결합니다. 전위차계가 원하는 기능과 반대로 작동하는 경우(즉, 모터 속도를 높이려면 전위차계 반시계 선을 돌려야 함) 드라이브의 전원을 끄고 S1 및 S3 연결을 교체하십시오.
아날로그 입력 신호 범위
전위차계를 사용하는 대신 드라이브가 아날로그 입력 신호를 따르도록 배선될 수 있습니다. 이 입력 신호는 vol 형식일 수 있습니다.tage(0 ± 5, 0 ± 10 VDC) 또는 전류(4-20 mA). 내장된 절연 기능을 통해 입력 신호를 접지 또는 비접지(플로팅)할 수 있습니다. 신호 공통/음극(-)을 S1에 연결하고 신호 기준/양극(+)을 S2에 연결합니다. 관련 점퍼 설정은 시작 섹션을 참조하십시오.
할 수 있게 하다
EN 및 COM 단자를 단락시켜 모터를 가속하여 속도를 설정합니다. ENABLE 단자를 열어 모터를 제로 속도로 관성 또는 제동합니다. 점퍼 설정은 상태 섹션의 DIP 스위치 3을 참조하십시오. ENABLE 스위치가 필요하지 않은 경우 단자 COM과 EN 사이에 점퍼를 배선합니다. 비상 정지를 위해 활성화를 사용하지 마십시오.
방향
DIR 및 COM 단자를 단락시켜 모터의 방향을 변경합니다. 방향 스위치가 필요하지 않은 경우 이 연결을 열어 둡니다.
스타트업
스위치 선택
선택 스위치(SW501)
딥 스위치 1: ON – 115VAC 출력 – 115VAC 또는 115VAC 입력으로 230VAC 출력을 설정합니다.
꺼짐 - 230VAC 출력 - 230VAC 또는 115VAC 입력으로 230VAC 출력을 설정합니다.
딥 스위치 1:
딥 스위치 2: ON – 50Hz – 출력에서 기본 주파수를 50Hz로 설정합니다.
OFF – 60Hz – 출력에서 기본 주파수를 50Hz로 설정합니다.
딥 스위치 1:
딥 스위치 3: ON – 제동 모드 – ENABLE 스위치를 열면 모터가 제로 속도로 제동됩니다.
감속을 적용하지 않고 DC 주입 제동 ramp.
딥 스위치 1:
OFF – 활성화 모드 – ENABLE 스위치를 열면 모터가 관성 정지합니다.
딥 스위치 4: ON – 1.6kHz 캐리어 주파수(가청 가능하지만 GFI 트리핑 방지).
OFF - 16kHz 캐리어 주파수(들리지 않지만 GFI 트리핑을 유발할 수 있음).
딥 스위치 1:

스타트업
– 인쇄 회로 기판에 이물질이 없는지 확인하십시오.
– 모든 스위치와 점퍼가 올바르게 설정되었는지 확인합니다.
- 속도 조정 전위차계를 시계 반대 방향으로 완전히 돌리거나(CCW) 아날로그 입력 신호를 최소로 1. 설정하십시오.
- AC 라인 볼륨 적용tage.
- 활성화 스위치를 닫고 녹색 전원 LED(IL1)가 깜박이는지 확인합니다.
- 속도 조정 전위차계를 시계 방향(CW)으로 천천히 진행하거나 아날로그 입력 신호를 높입니다. 전위차계가 CW로 바뀌거나 아날로그 신호가 증가하면 모터가 가속되어야 합니다. 원하는 속도에 도달할 때까지 계속하십시오.
- AC 라인 볼륨 제거tage 드라이브에서 모터를 관성 정지합니다.
LED
전력(IL1): 녹색 LED는 AC 라인 전압이 높을 때 켜집니다.tage는 드라이브에 적용되지만 드라이브는 비활성화됩니다. AC line vol이 꺼질 때마다 점멸합니다.tage가 드라이브에 적용되고 드라이브가 활성화됩니다.
상태(IL2): 빨간색 LED는 전류 제한에 있을 때 계속 켜져 있거나 오류 코드에 따라 깜박입니다.
2번 깜박임: 언더볼tage – 내부 DC BUS 볼륨tage가 너무 낮게 떨어졌습니다.
3회 깜박임: 오버볼tage – 내부 DC BUS 볼륨tage가 너무 높아졌습니다.
4번 깜박임: 전류 제한 또는 단락 – 드라이브가 전류 제한에 있거나 모터에서 단락을 감지했습니다.
5회 깜박임: 과열 종료 – 드라이브 온도가 임계 온도에 도달했습니다.
6번 깜박임: 과열 경고 – 드라이브 온도가 임계 온도에 근접하고 있습니다. 드라이브의 온도가 상승함에 따라 최대 모터 전류가 점진적으로 감소합니다.
American Control Electronics®의 저작권 2018 – 판권 소유. 이 문서의 어떤 부분도 American Control Electronics®의 서면 허가 없이는 어떤 형태로든 복제하거나 재전송할 수 없습니다. 이 문서의 정보 및 기술 데이터는 예고 없이 변경될 수 있습니다. American Control Electronics®는 주어진 목적에 대한 상품성 및 적합성에 대한 묵시적 보증을 포함하되 이에 국한되지 않고 이 자료와 관련하여 어떠한 종류의 보증도 하지 않습니다. American Control Electronics®는 이 문서에 나타날 수 있는 오류에 대해 책임을 지지 않으며 이 문서의 정보를 업데이트하거나 최신 상태로 유지할 것을 약속하지 않습니다.
작업
모터 유형
허용되는 모터 유형은 3상 유도, PSC(Permanent Split Capacitor), 음영 극 및 AC 동기식입니다. 커패시터 시작 유형 모터를 사용하지 않는 것이 좋습니다.
PMF 시리즈는 다양한 주파수와 비례 볼륨을 출력하도록 설계되었습니다.tage 단상 모터의 속도를 변경합니다. 그러나 단상 모터는 최대 속도 작동에 최적화되어 있으며 최대 정격 속도 이외의 속도에서는 예상 토크로 작동하지 않을 수 있습니다. PMF에는 단상 115VAC 입력을 230상 XNUMXVAC 출력으로 변환하는 기능이 있으므로 새로운 애플리케이션에서는 XNUMX상 모터를 사용하는 것이 좋습니다.
모터 연결
단상 작동 - 역회전 방지
단상운전의 경우 아래 그림과 같이 모터를 연결합니다. 그림과 같이 사전 배선된 커패시터와 관련 모터 코일이 단자 U 및 V에 연결되어 있는지 확인합니다. 이 연결은 2선식 모터를 사용하는 경우 내부적일 수 있습니다. 모터에 리드가 XNUMX개 있는 경우 직접 연결해야 합니다. 단상 작동 – 역회전
단상 작동 – 역회전
커패시터를 제거하고 아래 그림과 같이 모터를 연결합니다. 전자식 역회전을 허용하는 동안 이 배선 체계는 차선의 모터 작동을 초래할 수 있습니다. 모터 구성 및 애플리케이션 요구 사항에 따라 모터의 정격을 낮춰야 할 수 있습니다.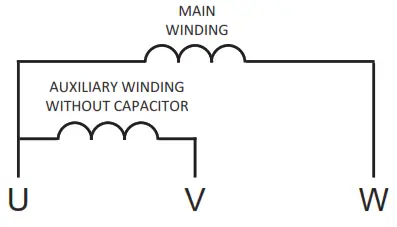
삼상 작동
XNUMX상 운전의 경우 아래 그림과 같이 모터를 연결합니다. 그림과 같이 터미널 U, V 및 W에 연결합니다.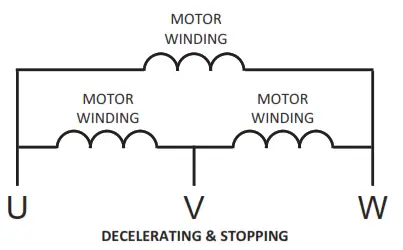
최소 또는 제로 속도로 감속
아래 표시된 스위치는 모터를 최소 속도로 감속하는 데 사용할 수 있습니다. S3와 전위차계 사이의 스위치를 열면 모터가 설정 속도에서 MIN SPEED 트림 포트 설정에 의해 결정된 최소 속도로 감속됩니다. MIN SPEED 트림 포트가 전체 CCW로 설정된 경우 스위치가 열리면 모터가 XNUMX 속도로 감속합니다. DECEL TIME 트림 포트 설정은 드라이브가 감속하는 속도를 결정합니다. 스위치를 닫으면 모터는 ACCEL TIME 트림 포트에 의해 결정된 속도로 설정 속도로 가속됩니다.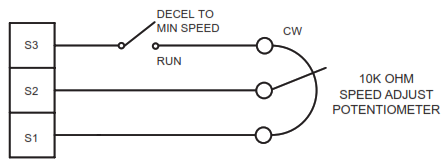
구경 측정
최소 속도(P1): MIN SPEED 설정은 속도 조정 전위차계 또는 아날로그 신호가 최소 속도(완전 CCW)로 설정된 경우 최소 모터 속도를 결정합니다. 제로 속도로 공장 설정되어 있습니다. MIN SPEED를 보정하려면:
- MIN SPEED 트림 포트를 전체 CCW로 설정합니다.
- 최소 속도에 대한 속도 조정 전위차계 또는 아날로그 신호를 설정합니다.
- 원하는 최소 속도에 도달하거나 회전 임계값에 도달할 때까지 MIN SPEED 트림 포트를 조정합니다.
최대 속도(P2): MAX SPEED 설정은 속도 조정 포텐시오미터 또는 아날로그 신호가 최대 속도로 설정될 때 최대 모터 속도를 결정합니다. 최대 모터 정격 속도로 공장 설정됩니다. MAX SPEED를 보정하려면:
- MAX SPEED 트림 포트를 전체 CCW로 설정합니다.
- 최대 속도를 위해 속도 조정 전위차계 또는 아날로그 신호를 설정합니다.
- 원하는 최대 속도에 도달할 때까지 MAX SPEED 트림 포트를 조정합니다.
모터가 원하는 최소 및 최대 속도로 작동하는지 확인하기 위해 재보정 후 MIN SPEED 및 MAX SPEED 조정을 확인하십시오.
가속(P3): ACCEL TIME 설정은 모터가 r에 걸리는 시간을 결정합니다.amp 방향에 관계없이 더 빠른 속도로. ACCEL TIME을 보정하려면 ACCEL TIME 트림 포트를 CW로 돌려 전진 가속 시간을 늘리고 CCW로 돌려 전진 가속 시간을 줄입니다.
감속(P4): DECEL TIME 설정은 모터가 r에 걸리는 시간을 결정합니다.amp 전위차계 또는 아날로그 신호에 의해 명령될 때 방향에 관계없이 더 낮은 속도로. DECEL TIME을 보정하려면 DECEL TIME 트림 포트를 시계 방향으로 돌려 감속 시간을 늘립니다.
슬립 보상(P5): SLIP COMP 설정은 모터 부하가 변할 때 모터 속도가 일정하게 유지되는 정도를 결정합니다. SLIP COMP를 보정하려면:
- SLIP COMP 트림 포트를 전체 CCW로 설정합니다.
- 모터가 부하 없이 중간 속도로 작동할 때까지 속도 조정 전위차계를 높입니다. 2. 휴대용 타코미터를 사용하여 모터 속도를 측정할 수 있습니다.
- 모터를 전부하 전류 등급으로 부하하십시오. 모터가 느려져야 합니다.
- 모터에 부하를 유지하면서 모터가 4에서 작동할 때까지 SLIP COMP 트림 포트를 돌립니다. 2단계에서 측정된 속도. 모터가 진동하는 경우(과다 보정) SLIP COMP 트림 포트가 너무 높게(CW) 설정되었을 수 있습니다. SLIP COMP 트림 포트를 CCW로 돌려 모터를 안정화합니다.
- 모터를 언로드하십시오.
권tage 부스트(P6): VOLTAGE BOOST 설정은 저속에서 모터 토크를 증가시킵니다. 최소 설정은 대부분의 애플리케이션에 충분하며 조정할 필요가 없습니다. 모터가 정지하거나 매우 낮은 속도(10Hz 미만)에서 비정상적으로 작동하는 경우 부스트 트림 포트를 조정해야 할 수 있습니다.
VOL을 보정하려면TAGE 부스트:
- 필요한 최저 연속 속도/주파수에서 모터를 작동합니다.
- 볼륨을 높이십시오TAG모터가 원활하게 작동할 때까지 E BOOST 트림 포트. 모터의 전류 정격을 초과하여 계속 작동하면 모터가 손상될 수 있습니다.
토크(P7): TQ LIMIT 설정은 모터를 가속하고 구동하기 위한 최대 토크를 결정합니다.
TQ LIMIT를 보정하려면.
- 드라이브에서 전원이 분리된 상태에서 RMS 전류계를 모터 리드 중 하나와 직렬로 연결합니다.
- TQ LIMIT 트림 포트를 전체 CW로 돌립니다. 전원을 공급하고 모터 속도를 최대 정격 속도로 조정합니다.
- 이전에 결정된 RMS 전류를 끌어오도록 모터를 로드합니다.
- 빨간색 LED가 깜박이기 시작할 때까지 TQ LIMIT 트림 포트를 CCW로 천천히 돌립니다. 그런 다음 트림 포트를 약간 더 돌려 모터를 줄이기 시작합니다. ampRMS 전류계의 s.
브레이크 볼륨tag전자(P8): 브레이크 볼륨tage는 볼륨을 결정합니다tag드라이브가 DC 주입 제동을 위해 전류를 적용하는 수준. 볼륨이 높을수록tage, 더 많은 전류가 모터가 됩니다. DC 주입 제동은 제동 모드(Dip 스위치 3 = ON)에서만 발생합니다.
제동 시간 초과(P9): BRAKE TIME-OUT은 제동 시 DC 주입 제동 전류가 적용되는 시간을 결정합니다. DC 주입 제동은 제동 모드(Dip 스위치 3 = ON)에서만 발생합니다. ![]()
문서 / 리소스
 |
Minarik MDVF03 개방형 섀시 마이크로프로세서 기반 가변 주파수 드라이브 [PDF 파일] 사용 설명서 MDVF03 개방형 섀시 마이크로프로세서 기반 가변 주파수 드라이브, MDVF03, 개방형 섀시 마이크로 프로세서 기반 가변 주파수 드라이브, 마이크로프로세서 기반 가변 주파수 드라이브, 가변 주파수 드라이브, 주파수 드라이브, 드라이브 |



