![]() Hiji Amérika Control Electronics Brand
Hiji Amérika Control Electronics Brand
MDVF03
Buka Chassis Microprocessor basis
Variabel Frékuénsi Girang sareng Isolasi pikeun Motor AC Tunggal sareng Tilu Fase
spésifikasi
| Modél | Jalur Voltage (VAC) | Motor Voltage (VAC) | Arus Motor Kontinyu (Amps) | Motor Horsepower Range |
| MDVF03-D230-PCM | 115 atawa 230 | 115 230 | 3.0* | 1/16 - 3/8 1/8 - 3/4 |
* Nalika dipasang pikeun ngidinan aliran hawa ka luhur sakuliah piring.
* De-rate ka 2.5 amps lamun dipasang dina sagala konfigurasi séjén.
Jalur AC Voltage………………115 / 230 VAC ± 10%, 50/60 Hz, fase tunggal
AC Line Ayeuna kalawan 115 VAC garis voltage nganggo motor 115V…………………………………………6.7 amps
AC Line Ayeuna kalawan 115 VAC garis voltage jeung motor 230V …………………………………………10.7 amps
AC Line Ayeuna kalawan 230 VAC garis voltage nganggo motor 230V…………………………………………6.7 amps
AC Motor Voltage …………………………………115 atanapi 230 VAC, 50/60 Hz, tunggal atanapi tilu fase
Kamampuh Overload…………………………………………………..200% (2x) salami 1 menit
Frékuénsi Pamawa Baku………………………………………………………………1.6 atanapi 16 kHz
Rentang Frékuénsi Kaluaran………………………………………….0 – 120 Hz
DC suntik Voltage……………………………………………… 0 – 27 VDC
DC suntik Voltage Waktos…………………………………………0 – 5 detik
Rentang Waktos Akselerasi (0 – 60 Hz)…………………………………..0.5 – 12 detik
Rentang Waktos Réduksi (60 – 0 Hz)………………………………………….0.5 – 12 detik
Rentang Sinyal Input Analog……………………………………………..0 ± 5 VDC, 0 ± 10 VDC, 4 – 20 mA
Input Impedansi (S1 nepi ka S2)……………………………………………………..>50K ohm
Geter Maksimum (0 – 50 Hz, > 50 Hz)…………………………………………0.5G, maksimal 0.1G
Kisaran Suhu Udara Sakuliling………………………………32°F – 104°F (0°C – 40°C)
Beurat………………………………………………………………………….1.20 lbs (0.54 kg)
Sertifikasi Kasalametan………………………………………………..cULus Didaptar, UL 61800-5-1, File #E132235
Peringatan Kasalametan
BACA SADAYA PERHATOSAN KASELAMATAN SAMÉMÉN PASANGKEUN IEU
- Entong masang, miceun, atanapi ngabalikeun deui alat-alat ieu nganggo kakuatan anu diterapkeun. Gaduh teknisi listrik anu mumpuni masang, nyaluyukeun, sareng ngalayanan alat ieu. Turutan Kode Listrik Nasional sareng sadaya kode listrik sareng kaamanan anu sanés, kalebet katangtuan UU Kasalametan sareng Kaséhatan Pekerjaan (OSHA), nalika masang alat.
- Potensial sirkuit aya dina 115 atanapi 230 VAC di luhur taneuh. Hindarkeun kontak langsung sareng papan sirkuit anu dicitak atanapi sareng elemen sirkuit pikeun nyegah résiko tatu serius atanapi fatality. Paké obeng non-logam pikeun nyaluyukeun pot motong calibration. Anggo alat panyalindungan pribadi sareng alat insulasi anu disatujuan upami dianggo dina drive ieu nganggo kakuatan.
- Ngurangan kasempetan kahuruan listrik, shock, atawa ledakan ku ngagunakeun téhnik grounding ditangtoskeun, panyalindungan leuwih-ayeuna, panyalindungan termal, sarta dipager. Turutan prosedur pangropéa sora.
- Minarik Drives nyarankeun pisan pamasangan saklar kakuatan master dina garis voltage asupan. Kontak switch kudu dipeunteun pikeun 250 VAC jeung 200% tina motor nameplate ayeuna.
- Nyoplokkeun kakuatan garis AC mangrupakeun hiji-hijina metode anu bisa ditarima pikeun eureun darurat. Entong nganggo ngerem injeksi DC, ngalambatkeun laju minimum, atanapi ngaluncurkeun eureun pikeun eureun darurat. Éta bisa jadi teu eureun a drive nu malfunctioning.
- Jalur ngamimitian sareng eureun (ngalarapkeun sareng ngahapus garis AC voltage) disarankeun pikeun jarang ngamimitian sareng ngeureunkeun drive wungkul. Regenerative ngerem, decelerating ka speed minimum, atawa coasting ka eureun disarankeun pikeun sering ngamimitian jeung eureun. Sering ngamimitian sareng ngeureunkeun tiasa ngahasilkeun torsi anu luhur. Ieu bisa ngabalukarkeun karuksakan kana motor.
- Ulah pegatkeun sambungan mana wae motor ti drive iwal kakuatan dicabut atawa drive geus ditumpurkeun. Ngabuka salah sahiji kalungguhan nalika drive dijalankeun tiasa ngaruksak drive.
- Dina kaayaan naon waé kedah kabel tingkat kakuatan sareng logika dibuntel babarengan.
- Pastikeun tab potentiometer ulah aya kontak jeung awak potentiometer urang. Grounding input bakal ngabalukarkeun karuksakan kana drive.
- Ngan ukur nyambung ka terminal L2-DBL upami nganggo jalur 115 VAC kalayan motor anu dipeunteun langkung luhur ti 120 VAC.
- Awas kudu dilaksanakeun nalika ngajalankeun motor kipas-tiis dina speeds low sabab kipas maranéhanana bisa jadi teu mindahkeun hawa cukup pikeun leres niiskeun motor. Minarik Drives nyarankeun motor "inverter-tugas" nalika rentang laju ngaleuwihan 10: 1.
- Produk ieu teu gaduh panyalindungan overload motor solid state internal. Éta henteu ngandung panyalindungan kaleuleuwihan anu sénsitip kagancangan, ingetan mémori termal, atanapi sasadiaan pikeun nampi sareng ngalaksanakeun sinyal tina alat jauh pikeun panyalindungan suhu anu luhur. Upami panyalindungan motor diperyogikeun dina produk pamakean akhir, éta kedah disayogikeun ku alat tambahan saluyu sareng standar NEC.
Diménsi
 Pamasangan
Pamasangan
Pamasangan
- Komponén drive sénsitip kana ngurangan éléktrostatik. Hindarkeun kontak langsung sareng papan sirkuit. Tahan drive ku piring wungkul.
- Ngajagi drive tina kokotor, Uap, sareng kontak teu kahaja.
- Nyadiakeun rohangan anu cukup pikeun aksés ka terminal sareng pot motong calibration.
- Pasang drive jauh tina sumber panas. Jalankeun drive dina rentang suhu operasi hawa sabudeureun dieusian.
- Nyegah sambungan leupas ku ngahindarkeun geter kaleuleuwihan drive.
- Pasang drive sareng papan na dina pesawat horisontal atanapi nangtung. Genep 0.17" (4 mm) liang dina piring narima # 8 screws sirah pan. Lamun dipasang horisontal, drive kudu de-dipeunteun ka 2.5 amps.
- Piring kedah dibumikeun bumi.
Wiring: Paké 16 - 18 AWG 75 ° C kawat pikeun garis AC (L1, L2, L2-DBL) jeung motor (U / A2, V / A1, W) wiring. Paké kawat 18 - 24 AWG pikeun wiring logika (COM, DIR, EN, Sl, S2, S3). Turutan standar NEC pikeun wiring. Torsi tightening pikeun terminal kakuatan TB502 dina dewan handap nyaéta 9 lb-in (1.0 Nm). Torsi tightening pikeun terminal logika TB501 na TB502 on dewan luhur nyaeta 1.77 lb-in (0.2 Nm).
Pedoman Shielding: Salaku aturan umum, eta disarankeun pikeun tameng sagala konduktor. Upami teu praktis pikeun ngalindungan konduktor listrik, disarankeun pikeun ngalindungan sadaya petunjuk tingkat logika. Lamun shielding of logic-level leads teu praktis, pamaké kudu pulas sagala logika leads with myself to minimize induced noise. Panginten peryogi bumi bumi kabel anu dilindungan. Lamun noise dihasilkeun ku alat lian ti drive, taneuh tameng dina tungtung drive. Lamun noise dihasilkeun ku drive, taneuh tameng dina tungtung jauh ti drive. Ulah taneuh duanana tungtung tameng.
Peunteun Arus Sirkuit Pendek (SCCR): Drive ieu cocog pikeun dianggo dina sirkuit anu sanggup ngirimkeun henteu langkung ti 5,000 rms Simétris. Amperes, 115/230 volt maksimum.
Perlindungan Sirkuit Cabang: Produk ieu ngagaduhan panyalindungan sirkuit solid state integral, anu henteu nyayogikeun panyalindungan sirkuit cabang. Perlindungan sirkuit cabang kedah disayogikeun saluyu sareng Kode Listrik Nasional sareng kode lokal tambahan. Listing UL ngabutuhkeun panggunaan sekering Kelas J, Kelas CC, atanapi Kelas T anu dipeunteun sahenteuna 230 VAC. Disarankeun make sekering dipeunteun pikeun 200% tina arus motor maksimum, iwal ngagunakeun drive dina operasi doubler, bisi nu fuses kudu dipeunteun pikeun 400% tina arus motor maksimum. Ngahijikeun suku HOT tina garis AC nalika nganggo 115 VAC sareng duanana garis nalika nganggo 230 VAC.
Kakuatan (papan handap)
Input Jalur AC
Sambungkeun garis AC voltage ka terminal L1 jeung L2. Upami mode dobel bakal dianggo (kaluaran 230 VAC sareng input 115 VAC), sambungkeun vol garis AC.tage ka terminal L1 jeung L2-DBL. Ulah nyieun sambungan kana L2-DBL lamun ngagunakeun 230 VAC sumber garis.
Motor
Sambungkeun motor ngarah ka terminal U / A2, V / A1, sarta W. Lamun motor teu spin dina arah nu dipikahoyong, kakuatan handap drive jeung ngabalikeun mana wae dua tina tilu sambungan ieu.
LOGIKA (TOP BOARD)
Speed Potentiometer
Paké 10K ohm, 1/4 W potentiometer pikeun kadali speed. Sambungkeun tungtung counter-jarum jam tina potentiometer ka S1, wiper ka S2, sarta tungtung jarum jam ka S3. Upami potentiometer dianggo sabalikna tina fungsionalitas anu dipikahoyong, (nyaéta pikeun ningkatkeun kagancangan motor, anjeun kedah ngahurungkeun kawat jarum jam potentiometer), mareuman drive sareng gentos sambungan S1 sareng S3.
Rentang Sinyal Input Analog
Gantina ngagunakeun potentiometer a, drive bisa jadi kabel nuturkeun sinyal input analog. Sinyal input ieu tiasa dina bentuk voltage (0 ± 5, 0 ± 10 VDC) atanapi ayeuna (4- 20 mA). Diwangun dina isolasi ngamungkinkeun sinyal input pikeun grounded atanapi ungrounded (floating). Sambungkeun sinyal umum / négatip (-) ka S1 sareng rujukan sinyal / positif (+) ka S2. Tingal bagian Startup pikeun setelan jumper patali.
Aktipkeun
Terminal pondok EN jeung COM pikeun ngagancangkeun motor pikeun speed set. Buka terminal ENABLE ka basisir atanapi marake motor ka laju nol. Tingal DIP Pindah 3 dina bagian Statup pikeun setelan jumper. Upami teu aya switch ENABLE anu dipikahoyong, kabel jumper antara terminal COM sareng EN. Ulah make Aktipkeun pikeun eureun darurat.
Arah
Terminal pondok DIR jeung COM pikeun ngarobah arah motor. Upami teu aya switch arah anu dipikahoyong, tinggalkeun sambungan ieu kabuka.
Ngamimitian
PILIH SWITCHES
Pilih Pindah (SW501)
Dip Switch 1: ON - 115 VAC Output - Nyetél kaluaran 115 VAC kalayan input 115 atanapi 230 VAC.
OFF - 230 VAC Output - Nyetél kaluaran 230 VAC kalayan input 115 atanapi 230 VAC.
Dip Switch 1:
Dip Switch 2: ON - 50 Hz - Nyetél frékuénsi dasar 50 Hz dina kaluaran.
OFF - 60 Hz - Nyetél frékuénsi dasar 50 Hz dina kaluaran.
Dip Switch 1:
Dip Switch 3: ON - Modeu Rem - Muka saklar ENABLE bakal marake motor ka laju nol kalayan
DC Injection ngerem tanpa nerapkeun decel ramp.
Dip Switch 1:
OFF - Aktipkeun Mode - Muka saklar ENABLE bakal basisir motor eureun.
Dip Pindah 4: ON - 1.6 kHz Carrier Frékuénsi (karungu, tapi nyegah GFI tripping).
OFF - 16 kHz Carrier Frékuénsi (teu kadéngé, tapi bisa ngabalukarkeun GFI tripping).
Dip Switch 1:

NGAMIMITIAN
- Pariksa yén henteu aya bahan konduktif asing anu aya dina papan sirkuit anu dicitak.
- Pastikeun yén sadaya saklar sareng jumper leres diatur.
- Hurungkeun speed ngaluyukeun potentiometer pinuh counterclockwise (CCW) atawa nyetel sinyal input analog 1. minimum.
- Larapkeun garis AC voltage.
- Tutup saklar aktipkeun sareng pariksa yen LED Daya héjo (IL1) upami kedip-kedip.
- Lalaunan maju laju saluyukeun potentiometer saarah jarum jam (CW) atawa ningkatkeun sinyal input analog. Motor kedah ngagancangkeun nalika potentiometer dihurungkeun CW atanapi nalika sinyal analog ningkat. Nuluykeun nepi ka speed nu dipikahoyong kahontal.
- Leupaskeun garis AC voltage ti drive ka basisir motor ka eureun.
LEDs
Daya (IL1): Héjo LED padet nalika AC garis voltage diterapkeun kana drive, tapi drive ditumpurkeun. Ieu kedip-kedip iraha waé garis AC voltage diterapkeun kana drive sareng drive diaktipkeun.
Status (IL2): LED Beureum padet lamun dina wates ayeuna atawa kedip-kedip handap kode lepat:
2 Kedip-kedip: Undervoltage – Internal DC BUS voltage turun teuing low.
3 Kedip-kedip: Overvoltage – Internal DC BUS voltage acuk luhur teuing.
4 Kedip-kedip: Wates Ayeuna atanapi Sirkuit Pondok - Drive aya dina wates ayeuna atanapi parantos ngadeteksi pondok dina motor.
5 Kedip-kedip: Overtemperature Pareum - Suhu drive parantos ngahontal suhu kritis.
6 Kedip-kedip: Perhatosan Overtemperature - Suhu drive nuju ka suhu kritis. Arus motor maksimum dikurangan laun-laun nalika suhu drive naék.
Copyright 2018 ku Amérika Control Electronics® - Sadaya hak ditangtayungan. Henteu aya bagian tina dokumén ieu anu tiasa diproduksi atanapi dikirimkeun deui dina bentuk naon waé tanpa idin tinulis ti American Control Electronics®. Inpormasi sareng data téknis dina dokumén ieu tiasa robih tanpa aya bewara. American Control Electronics® henteu masihan jaminan naon waé anu aya hubunganana sareng bahan ieu, kalebet, tapi henteu diwatesan ku, jaminan anu tersirat ngeunaan sipat dagang sareng kabugaranna pikeun tujuan anu tangtu. American Control Electronics® henteu nanggung tanggung jawab pikeun kasalahan anu muncul dina dokumén ieu sareng henteu komitmen pikeun ngapdet atanapi ngajaga inpormasi dina dokumen ieu.
Operasi
JENIS MOTOR
Jenis motor anu tiasa ditampi nyaéta induksi 3-fase, kapasitor pamisah permanén (PSC), kutub teduh, sareng sinkron AC. Ieu henteu dianjurkeun ngagunakeun motor tipe kapasitor-mimitian.
Runtuyan PMF dirancang pikeun kaluaran frékuénsi varying jeung vol proporsionaltage pikeun ngarobah laju motor fase tunggal. Sanajan kitu, motor fase tunggal dioptimalkeun pikeun operasi speed pinuh sarta bisa jadi teu beroperasi kalawan torsi ekspektasi dina speeds lian ti speed dipeunteun pinuh. Kusabab PMF gaduh kamampuan pikeun ngarobih input 115 VAC fase tunggal kana kaluaran 230 VAC tilu fase, disarankeun ngagunakeun motor tilu fase dina aplikasi anyar.
Sambungan Motor
Operasi Fase Tunggal - Non-reversing
Pikeun operasi fase tunggal, sambungkeun motor saperti dina gambar di handap. Pastikeun yén kapasitor prewired jeung coil motor pakait na disambungkeun ka terminal U jeung V sakumaha ditémbongkeun. Sambungan ieu tiasa internal upami nganggo motor 2-kawat. Upami motor gaduh tilu lead, anjeun kedah ngadamel sambungan ieu nyalira. Operasi Fase Tunggal - Ngabalikeun
Operasi Fase Tunggal - Ngabalikeun
Cabut kapasitor sareng sambungkeun motor sapertos anu dipidangkeun dina gambar di handap ieu. Bari ngamungkinkeun pikeun ngabalikeun kaayaan padet, skéma wiring ieu bisa ngahasilkeun operasi motor sub-optimal. Gumantung kana konstruksi motor jeung sarat aplikasi, motor bisa jadi kudu derated.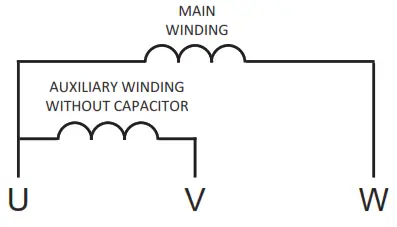
Operasi tilu fase
Pikeun operasi tilu fase, sambungkeun motor saperti dina gambar di handap. Nyambung ka terminal U, V, sarta W sakumaha ditémbongkeun.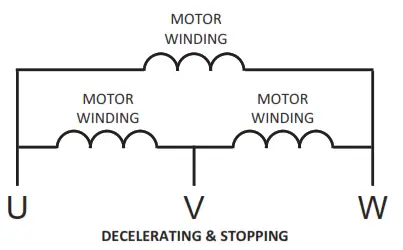
Turunkeun ka Laju Minimum atanapi Nol
Saklar anu dipidangkeun di handap ieu tiasa dianggo pikeun ngalambatkeun motor ka laju minimum. Muka switch antara S3 na potentiometer nu decelerates motor ti speed set ka speed minimum ditangtukeun ku MIN SPEED motong pot seting. Lamun MIN SPEED motong pot diatur CCW pinuh, motor decelerates ka enol speed nalika switch dibuka. Setelan pot motong DECEL TIME nangtukeun laju di mana drive decelerates. Ku nutup saklar, motor accelerates nyetel speed dina laju ditangtukeun ku pot motong ACCEL TIME.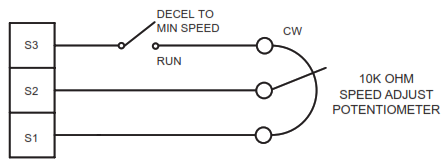
Kalibrasi
Laju Minimum (P1): Setélan MIN SPEED nangtukeun laju motor minimum nalika laju ngaluyukeun potentiometer atawa sinyal analog disetel pikeun speed minimum (CCW pinuh). Éta diatur pabrik pikeun laju enol. Pikeun calibrate MIN SPEED:
- Setel pot motong MIN SPEED pinuh CCW.
- Atur speed saluyukeun potentiometer atawa sinyal analog pikeun speed minimum.
- Saluyukeun pot motong MIN SPEED nepi ka speed minimum nu dipikahoyong kahontal atawa ngan dina bangbarung rotasi.
Laju Maksimum (P2): Setélan MAX SPEED nangtukeun speed motor maksimum lamun speed ngaluyukeun potenyiometer atawa sinyal analog disetel pikeun speed maksimum. Éta diatur pabrik pikeun laju dipeunteun motor maksimum. Pikeun calibrate MAX SPEED:
- Atur pot motong MAX SPEED pinuh CCW.
- Atur speed saluyukeun potentiometer atawa sinyal analog pikeun speed maksimum.
- Saluyukeun pot motong MAX SPEED nepi ka speed maksimum nu dipikahoyong kahontal.
Pariksa pangaluyuan MIN SPEED sareng MAX SPEED dina kalibrasi ulang pikeun mastikeun yén motor jalan dina laju minimum sareng maksimum anu dipikahoyong.
Akselerasi (P3): Setélan ACCEL TIME nangtukeun waktu motor nyandak ramp ka speed nu leuwih luhur paduli arah. Pikeun calibrate WAKTU ACCEL, balikkeun pot motong ACCEL TIME CW pikeun ningkatkeun waktos akselerasi maju sareng CCW pikeun ngirangan waktos akselerasi maju.
Turunan (P4): Setélan DECEL TIME nangtukeun waktu motor nyokot ramp ka speed handap lamun paréntah ku potentiometer atawa sinyal analog, paduli arah. Pikeun calibrate DECEL TIME, balikkeun DECEL TIME motong pot CW pikeun ngaronjatkeun waktos deceleration.
Kompensasi Slip (P5): Setélan SLIP COMP nangtukeun darajat laju motor tetep konstan nalika beban motor robih. Pikeun calibrate SLIP COMP:
- Setel pot motong SLIP COMP pinuh CCW.
- Ningkatkeun speed saluyukeun potentiometer nepi ka motor jalan di midspeed tanpa beban. A 2. tachometer handheld bisa dipaké pikeun ngukur speed motor.
- Beban motor ka rating ayeuna beban pinuh na. Motor kudu ngalambatkeun.
- Bari tetep beban dina motor, muterkeun SLIP COMP motong pot dugi motor ngalir di 4. speed diukur dina hambalan 2. Lamun motor oscillates (overcompensation), motong SLIP COMP 4. pot bisa diatur teuing tinggi (CW). Hurungkeun SLIP COMP motong pot CCW pikeun nyaimbangkeun motor.
- Ngabongkar motor.
Voltage naekeun (P6): VOLTAGSetélan E BOOST ningkatkeun torsi motor dina kecepatan rendah. Setélan minimum cukup pikeun kalolobaan aplikasi sareng henteu kedah disaluyukeun. Lamun lapak motor atawa ngajalankeun erratically dina speeds pisan low (handap 10 Hz), pot motong dorongan bisa jadi kudu adjustment.
Pikeun calibrate VOLTAGE naekeun:
- Jalankeun motor dina laju kontinyu panghandapna / frékuénsi diperlukeun.
- Ningkatkeun VOLTAGE BOOST motong pot dugi motor jalan mulus. Operasi kontinyu saluareun rating motor urang ayeuna bisa ngaruksak motor.
Torsi (P7): Setélan TQ LIMIT nangtukeun torsi maksimum pikeun ngagancangkeun sareng nyetir motor.
Pikeun calibrate TQ LIMIT.
- Kalayan kakuatan anu dipegatkeun tina drive, sambungkeun ammeter RMS sacara séri sareng salah sahiji lead motor.
- Hurungkeun pot motong TQ LIMIT ka CW pinuh. Larapkeun kakuatan tur saluyukeun speed motor ka speed dipeunteun pinuh.
- Beban motor supados ngagambar arus RMS anu ditangtukeun sateuacana.
- Lalaunan ngahurungkeun TQ LIMIT motong pot CCW dugi LED beureum mimiti kedip-kedip. Teras péngkolan panci motong rada langkung supados éta mimiti ngirangan motor amps dina ammeter RMS.
Rem Voltage (P8): rem voltage nangtukeun voltage tingkat dimana drive bakal nerapkeun arus pikeun DC Inject Braking. Nu leuwih luhur voltage, beuki ayeuna bakal motor. DC Injection Braking ngan bakal lumangsung dina Mode ngerem (Dip Switch 3 = ON).
Marake Waktos Pareum (P9): BRAKE TIME-OUT nangtukeun sabaraha lila arus DC Injection Braking bakal diterapkeun nalika ngerem. DC Injection Braking ngan bakal lumangsung dina Mode ngerem (Dip Switch 3 = ON). ![]()
Dokumén / Sumberdaya
 |
Minarik MDVF03 Buka Chassis Microprocessor-Dumasar Variabel Frékuénsi Girang [pdf] Buku Panduan Pamilik MDVF03 Open Chassis Microprocessor-Dumasar Variabel Frékuénsi Girang, MDVF03, Buka Chassis Microprocessor basis Variabel Frékuénsi Girang, Microprocessor basis Variabel Frékuénsi Girang, Variabel Frékuénsi Girang, Frékuénsi Girang, Drive |



