![]() နှစ်ခု-ပြည်နယ် servo ထိန်းချုပ်ကိရိယာ
နှစ်ခု-ပြည်နယ် servo ထိန်းချုပ်ကိရိယာ

![]() AVT ၁၉၉၅
AVT ၁၉၉၅
AVT 1605 State Servo Controller နှစ်ခု
 https://serwis.avt.pl/manuals/AVT1648_EN.pdf
https://serwis.avt.pl/manuals/AVT1648_EN.pdf
မော်ဒယ် servos များသည် သော့တံကိုမောင်းနှင်ခြင်းကဲ့သို့သော ရည်ရွယ်ထားသည့်အတိုင်းမဟုတ်သည့် အခြားအပလီကေးရှင်းများအတွက် စံပြဖြစ်သည်။ ဤကဲ့သို့သော စံမမီသော အပလီကေးရှင်းတစ်ခုတွင်၊ ပြဿနာအရှိဆုံးမှာ servo အား အလုပ်လုပ်ရန် "ခိုင်းစေခြင်း" ဖြစ်သည်၊ အဘယ်ကြောင့်ဆိုသော် ၎င်းသည် အချို့သော ဘောင်တစ်ခုအား လှိုင်းပုံစံတစ်ခုအား ပါဝါပေးရန်လိုအပ်ပါသည်။ ဖော်ပြထားသော ပတ်လမ်းသည် ထိုပြဿနာမှ ကျွန်ုပ်တို့ကို သက်သာရာရစေသည်။
လက္ခဏာများ
- Hiten စံ servo ချိတ်ဆက်ကိရိယာ
- နှစ်ခု-ပြည်နယ်ထိန်းချုပ်မှုအတွက်ထည့်သွင်းခြင်း။
- servo လက်တံ၏အဆုံးတည်နေရာကိုဆုံးဖြတ်ရန် potentiometers နှစ်ခု
- လက်မောင်းအပြည့်လှည့်ချိန်- 1 စက္ကန့်
- လက်မောင်းအနေအထားကို ချောမွေ့စွာ ချိန်ညှိခြင်း (တစ်ခုစီမှတဆင့်
- အခြေအနေညွှန်ပြချက် - LED
- power supply 8÷18 V DC
တိုက်နယ်ဖော်ပြချက်
controller ၏ schematic diagram ကို ပုံ 1 တွင် ပြထားသည်။ ၎င်းတွင် ဒြပ်စင်အနည်းငယ်သာ ပါဝင်ပါသည်။ D1 diode သည် supply vol ၏ ပြောင်းပြန်ချိတ်ဆက်မှုကို ကာကွယ်ပေးသည်။tage၊ US1 stabilizer သည် servo အား ပါဝါပေးရန် 5 V ကို ထောက်ပံ့ပေးပြီး R3 နှင့် C3 ပါ၀င်သော ဒြပ်စင်များပါရှိသော နောက်ထပ် filter တစ်ခုမှတဆင့် ၎င်းသည် US2 microcontroller ကို ပါဝါပေးပါသည်။ R4 ခုခံမှုစနစ်သည် ပြည်နယ်ရွေးချယ်မှုထည့်သွင်းမှုကို ကာကွယ်ပေးသည်၊ R5 သည် ထိန်းချုပ်မှုခုန်နှုန်းအထွက်ကို ကာကွယ်ပေးသည်၊ R6 သည် မိုက်ခရိုကွန်ထရိုလာ၏ တက်ကြွသောအခြေအနေကို တွန်းအားပေးပြီး R7 သည် D2 LED ၏ လက်ရှိကို ကန့်သတ်ထားသည်။ R1 နှင့် R2 potentiometers များကို vol နှစ်ခုသတ်မှတ်ရန်အသုံးပြုသည်။tagအထွက်ရှိ ပဲမျိုးစုံ၏ ကန့်သတ်ဘောင်များကို ထိန်းချုပ်သည့် e တန်ဖိုးများ။ ကျွန်ုပ်တို့သည် supply vol ကိုချိတ်ဆက်သည်။tage 8…18 V အကွာအဝေးမှ PWR connector သို့ SERVO connector သို့ကျွန်ုပ်တို့သည်ဘုတ်ပေါ်ရှိအမှတ်အသားများအတိုင်း servo ကိုချိတ်ဆက်သည်။ 0 V သို့မဟုတ် 5 V ကို SW connector ၏ lead 2 သို့ သက်ရောက်သည်၊ ၎င်းသည် servo အား ရာထူးနှစ်ခုအနက်မှ တစ်ခုသို့ထည့်သည်။ ဆားကစ်၏ လည်ပတ်မှုကို မိုက်ခရိုကွန်ထရိုလာ၏ မှတ်ဉာဏ်တွင်ပါရှိသော ပရိုဂရမ်တစ်ခုက ထိန်းချုပ်သည်၊ ၎င်း၏ ဘလောက်ပုံစံကို ပုံ 2 တွင် ပြထားသည်။ TIMER? timer circuit သည် 16 ms တိုင်း interrupts များကိုထုတ်ပေးရန်အတွက်အသုံးပြုခဲ့သော 20-bit counter တစ်ခုဖြစ်ပြီး၊ ထို့ကြောင့် output waveform ၏ကာလကိုသတ်မှတ်ပေးပါသည်။ ကောင်တာ ပြည့်သွားသောအခါ အနှောင့်အယှက် ဖြစ်ပေါ်သည်။ သွေးခုန်နှုန်း၏ကြာချိန်ကိုဆုံးဖြတ်ရန် Timer ကောင်တာကိုအသုံးပြုသည်။
၎င်း၏အစကို Timer1 မှ ကြားဖြတ်တစ်ခုဖြင့် ထပ်တူပြုပြီး ၎င်း၏ လျှံထွက်မှုသည် သွေးခုန်နှုန်းကိုအဆုံးသတ်ကာ တန်ပြန်ရပ်တန့်သည့် ဒုတိယအနှောက်အယှက်တစ်ခုထုတ်ပေးသည်။ နှောင့်ယှက်ရမည့်အချိန်နှင့် ထို့ကြောင့် သွေးခုန်နှုန်းကြာချိန်ကို A/C ပြောင်းလဲခြင်း၏ရလဒ်နှင့် အချိုးကျဖြစ်သည့် တန်ပြန်၏ကနဦးတန်ဖိုးကို ပြောင်းလဲခြင်းဖြင့် ဆုံးဖြတ်သည်။ ထို့ကြောင့် voltage သည် ADC input တွင် 0…5 V အကွာအဝေးတွင်၊ 0.5…2.5 ms ခန့်အကွာအဝေးရှိ သွေးခုန်နှုန်းကြာချိန်ကို ပြောင်းလဲစေသည်။
ထို့အပြင်၊ SW input မှ state သည် မည်သည့် potentiometer (R1 သို့မဟုတ် R2) မှ vol ကိုဆုံးဖြတ်သည်tagconverter ၏ input တွင် e ။ ၎င်းသည် SW input သို့မဟုတ် potentiometers များ၏အနေအထားကိုပြောင်းလဲခြင်းဖြင့် SW input သို့မဟုတ် full range မှတဆင့် servo ကိုပြည်နယ်နှစ်ခုတွင်ထိန်းချုပ်နိုင်စေပါသည်။

ပုံ။ 1 Schematic diagram |
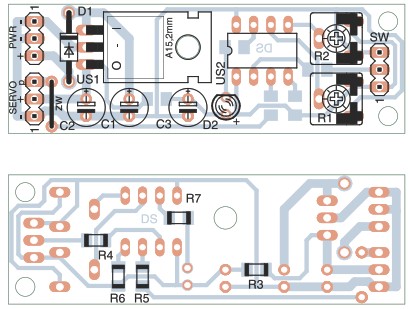 ပုံ 2 Controller ၏ တပ်ဆင်မှု ပုံကြမ်း ပုံ 2 Controller ၏ တပ်ဆင်မှု ပုံကြမ်း |
စည်းဝေးပွဲနှင့် စတင်ခြင်း။
စက်ပစ္စည်းအား ပုံ 2 တွင်ပြသထားသည့် တပ်ဆင်မှုပုံစံကို ပုံနှိပ်ဆားကစ်ဘုတ်ပေါ်တွင် တပ်ဆင်ထားသည်။ စည်းဝေးပွဲသည် ပိုမိုကျယ်ပြန့်သောဖော်ပြချက်မလိုအပ်သော်လည်း၊ resistors R3…R7 ကို တပ်ဆင်သည့်အခါ အနည်းငယ်အာရုံစိုက်သင့်သည်။ ၎င်းတို့သည် ဘုတ်၏အခြားတစ်ဖက်တွင် ဂဟေဆော်ထားသော SMD ခံနိုင်ရည်များဖြစ်သည်။
ဒြပ်စင်များစာရင်း
ခုခံမှုများ
R3: ……………………………………………………..47 Ω (SMD, 1206)
R1, R2: …………………………….potentiometer 10÷50 kΩ
Capacitors-
R4-R7 ……………………………………………… 1 kΩ (SMD, 1206)
C1-C3 …………………………………………………… 100 uF / 25V
တစ်ပိုင်းလျှပ်ကူးပစ္စည်း-
D1:…………………………………………………………………1M4007
D2: ……………………………………………………………………………….. LED
US1:…………………………………………………………………….7805
US2:…………………………………………………………………..PIC12F675
အခြား-
PWR၊ SERVO:………………………… ရွှေပင် 1×3 ထောင့်ချိုး
SW- …………………………….ရွှေပင် 1×3 ထောင့်+ခုန်ပါ
ZW: …………………………………………………………………….. ခုန်ပါ
![]() ဤသင်္ကေတသည် သင့်ထုတ်ကုန်ကို အခြားအိမ်သုံးအမှိုက်များဖြင့် မစွန့်ပစ်ပါနှင့်။
ဤသင်္ကေတသည် သင့်ထုတ်ကုန်ကို အခြားအိမ်သုံးအမှိုက်များဖြင့် မစွန့်ပစ်ပါနှင့်။
ယင်းအစား အမှိုက်လျှပ်စစ်နှင့် အီလက်ထရွန်နစ်ပစ္စည်းများကို ပြန်လည်အသုံးပြုရန်အတွက် သတ်မှတ်ထားသော စုဆောင်းနေရာသို့ သင့်စွန့်ပစ်ပစ္စည်းများကို လွှဲပြောင်းပေးခြင်းဖြင့် လူ့ကျန်းမာရေးနှင့် သဘာဝပတ်ဝန်းကျင်ကို ကာကွယ်သင့်သည်။
AVT SPV သည် ကြိုတင်အသိမပေးဘဲ အပြောင်းအလဲပြုလုပ်ပိုင်ခွင့်ကို လက်ဝယ်ရှိပါသည်။ ညွှန်ကြားချက်များအတွင်း ညွှန်ပြချက်များနှင့်အညီ မဟုတ်သော စက်၏ တပ်ဆင်ခြင်းနှင့် ချိတ်ဆက်မှုသည် အစိတ်အပိုင်းများကို မထင်သလို ပြောင်းလဲခြင်းနှင့် ဖွဲ့စည်းပုံဆိုင်ရာ ပြုပြင်မွမ်းမံမှုများကြောင့် စက်ပစ္စည်းကို ပျက်စီးစေပြီး သုံးစွဲသူများကို အန္တရာယ်ဖြစ်စေနိုင်သည်။ ထိုသို့သောအခြေအနေတွင်၊ ထုတ်လုပ်သူနှင့် ၎င်း၏လုပ်ပိုင်ခွင့်ရကိုယ်စားလှယ်များသည် ထုတ်ကုန်အသုံးပြုမှု သို့မဟုတ် ချွတ်ယွင်းချက်ကြောင့် တိုက်ရိုက် သို့မဟုတ် သွယ်ဝိုက်၍ဖြစ်စေ ဖြစ်ပေါ်လာသည့် ပျက်စီးဆုံးရှုံးမှုများအတွက် တာဝန်မကင်းပါ။
DIY kit များကို ပညာရေးနှင့် သရုပ်ပြခြင်းအတွက်သာ ရည်ရွယ်ပါသည်။ ၎င်းတို့သည် စီးပွားဖြစ်အသုံးချပရိုဂရမ်များတွင် အသုံးပြုရန် ရည်ရွယ်ခြင်းမဟုတ်ပါ။ ၎င်းတို့ကို ဤကဲ့သို့သော အပလီကေးရှင်းများတွင် အသုံးပြုပါက၊ စည်းမျဉ်းများအားလုံးကို လိုက်လျောညီထွေရှိစေရန်အတွက် ဝယ်ယူသူတွင် တာဝန်ရှိသည်ဟု ယူဆပါသည်။
![]()
AVT SPV Sp. z oxo ။
Leszczynowa 11 လမ်း၊ 03-197 ဝါဆော၊ ပိုလန်
kity@avt.pl
![]()
စာရွက်စာတမ်းများ / အရင်းအမြစ်များ
 |
AVT AVT 1605 ပြည်နယ် Servo Controller နှစ်ခု [pdf] ညွှန်ကြားချက်များ AVT 1605 နှစ်ခုပြည်နယ် ဆာဗာကွန်ထရိုး၊ AVT 1605၊ ပြည်နယ် ဆာဗိုထိန်းချုပ်ကိရိယာ နှစ်ခု၊ ပြည်နယ် ဆာဗိုထိန်းချုပ်ကိရိယာ၊ ဆာဗိုထိန်းချုပ်ကိရိယာ၊ ထိန်းချုပ်ကိရိယာ |