![]() 2状態サーボコントローラ
2状態サーボコントローラ

![]() AVT1605
AVT1605
AVT 1605 ツーステート サーボ コントローラー
 https://serwis.avt.pl/manuals/AVT1648_EN.pdf
https://serwis.avt.pl/manuals/AVT1648_EN.pdf
モデル サーボは、ロック ボルトの駆動など、本来の用途以外の用途に最適です。このような非標準の用途では、特定のパラメータを持つ波形に電力を供給する必要があるため、サーボを「強制的に」動作させることが最も面倒です。ここで説明する回路により、このような問題が解消されます。
特徴
- Hiten標準サーボコネクタ
- 2状態制御の入力
- サーボアームの終端位置を決定するための2つのポテンショメータ
- 腕の完全な回転時間: 1秒
- アームの位置をスムーズに調整できます(各
- ステータス表示 – LED
- 電源 8÷18 V DC
回路記述
コントローラの回路図を図1に示します。これはいくつかの要素のみで構成されています。D1ダイオードは、電源電圧の逆接続から保護します。tag例えば、US1スタビライザーはサーボに5Vを供給し、R3とC3の要素を含む追加のフィルターを介してUS2マイクロコントローラにも電力を供給します。R4抵抗器は状態選択入力を保護し、R5は制御パルス出力を保護し、R6はマイクロコントローラのアクティブ状態を強制し、R7はD2 LEDの電流を制限します。R1とR2ポテンショメータはXNUMXつのボリュームを設定するために使用されます。tage値は、後で出力のパルスのパラメータを制御します。電源電圧を接続しますtagPWR コネクタには 8…18 V の範囲で電圧を供給し、SERVO コネクタにはボード上のマークに従ってサーボを接続します。SW コネクタのリード 0 には 5 V または 2 V が印加され、サーボは 2 つの位置のいずれかに配置されます。回路の動作はマイクロコントローラのメモリに含まれるプログラムによって制御されます。そのブロック図を図 16 に示します。TIMER? タイマー回路は 20 ビット カウンターで、XNUMX ms ごとに割り込みを生成して出力波形の周期を確立するために使用されます。カウンターがオーバーフローすると割り込みが発生します。タイマー カウンターはパルスの持続時間を決定するために使用されます。
その開始はタイマー1からの割り込みによって同期され、そのオーバーフローはパルスを終了し、カウンターを停止するXNUMX番目の割り込みを生成します。割り込みの時間、つまりパルスの持続時間は、A/C変換の結果に比例するカウンターの初期値を変更することによって決定されます。したがって、電圧を変更すると、tagADC 入力での 0…5 V の範囲の電圧により、パルス持続時間が約 0.5…2.5 ms の範囲で変化します。
さらに、SW入力の状態によって、どのポテンショメータ(R1またはR2)がボリュームを決定するかが決まります。tage をコンバータの入力に入力します。これにより、ポテンショメータの位置を変更することで、SW 入力または全範囲を介してサーボを 2 つの状態で制御できます。

図1 模式図 |
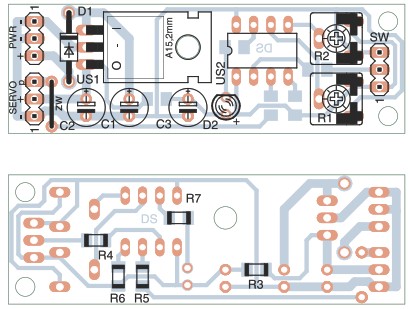 図2 コントローラの設置図 図2 コントローラの設置図 |
組み立てと起動
このデバイスはプリント回路基板上に組み立てられており、その組み立て図を図 2 に示します。組み立てについてはこれ以上詳しく説明する必要はありませんが、抵抗器 R3 ~ R7 を組み立てる際には少し注意が必要です。これらは SMD 抵抗器であり、基板の反対側にはんだ付けされています。
要素のリスト
抵抗器:
R3: ………………………………………………..47 Ω (SMD、1206)
R1、R2: ……………………………ポテンショメータ 10÷50 kΩ
コンデンサ:
R4-R7………………………………………………1kΩ(SMD、1206)
C1-C3 ……………………………………………………100uF / 25V
半導体:
D1:……………………………………………………………………1M4007
D2: …………………………………………………………………………………..LED
US1:………………………………………………………………………….7805
US2:…………………………………………………………..PIC12F675
他の:
PWR、サーボ:…………………………ゴールドピン 1×3 アングル
SW: ……………………………ゴールドピン 1×3 アングル+ジャンパー
ZW:………………………………………………………………..ジャンパー
![]() この記号は、製品を他の家庭ごみと一緒に廃棄しないことを意味します。
この記号は、製品を他の家庭ごみと一緒に廃棄しないことを意味します。
代わりに、廃電気電子機器のリサイクルのために指定された収集場所に廃棄物機器を引き渡すことにより、人の健康と環境を保護する必要があります。
AVT SPV は予告なく変更する権利を留保します。 説明書の指示に従わないデバイスの組み立てと接続、コンポーネントの任意の変更、および構造上の変更は、デバイスに損傷を与え、ユーザーを危険にさらす可能性があります。 このような場合、製造元およびその正規代理店は、製品の使用または誤動作から直接的または間接的に生じるいかなる損害についても責任を負わないものとします。
DIY キットは、教育およびデモンストレーションのみを目的としています。 商用アプリケーションでの使用は意図されていません。 それらがそのようなアプリケーションで使用される場合、購入者はすべての規制への準拠を保証するすべての責任を負います。
![]()
AVT SPV Sp. z oxo.
Leszczynowa 11 Street, 03-197 ワルシャワ, ポーランド
kity@avt.pl
![]()
ドキュメント / リソース
 |
AVT AVT 1605 XNUMX ステート サーボ コントローラ [pdf] 説明書 AVT 1605 1605 ステート サーボ コントローラ、AVT XNUMX、XNUMX ステート サーボ コントローラ、ステート サーボ コントローラ、サーボ コントローラ、コントローラ |