![]() ໂມດູນ 2 ຊ່ອງ
ໂມດູນ 2 ຊ່ອງ
ຂອງ LOGIC ຫຼື COUNTER INPUTS
SM3
![]()
APPLICATION
ໂມດູນການປ້ອນຂໍ້ມູນຕາມເຫດຜົນ
ໂມດູນ SM3 ຂອງສອງຕົວປ້ອນຂໍ້ມູນຕາມເຫດຜົນແມ່ນຈຸດຫມາຍປາຍທາງເພື່ອເກັບກໍາສະຖານະຂອງ logic inputs ແລະເຮັດໃຫ້ພວກເຂົາສາມາດເຂົ້າເຖິງລະບົບອຸດສາຫະກໍາທີ່ໃຊ້ຄອມພິວເຕີເຮັດວຽກຢູ່ໃນພື້ນຖານຂອງການໂຕ້ຕອບ RS-485.
ໂມດູນມີ 2 logic inputs ແລະ RS-485 interface ກັບ MODBUS RTU ແລະ ASCII transmission protocols.
ພອດ RS-485 ແລະ RS-232 ຖືກແຍກອອກຈາກສັນຍານເຂົ້າແລະການສະຫນອງ.
ການຂຽນໂປລແກລມໂມດູນແມ່ນເປັນໄປໄດ້ໂດຍວິທີການຂອງພອດ RS-485 ຫຼື RS-232.
ໃນຊຸດໂມດູນ SM3 ມີສາຍເຊື່ອມຕໍ່ເພື່ອເຊື່ອມຕໍ່ກັບຄອມພິວເຕີ PC (RS-232).
ຕົວກໍານົດການໂມດູນ:
- ສອງການປ້ອນຂໍ້ມູນຕາມເຫດຜົນ,
– ການໂຕ້ຕອບການສື່ສານ RS-485 ກັບ MODBUS RTU ແລະ ASCII ອະນຸສັນຍາລະບົບສາຍສົ່ງເພື່ອປະຕິບັດງານໃນລະບົບຄອມພິວເຕີທີ່ມີສັນຍານສາຍສົ່ງ optical ໂດຍອີງໃສ່ diodes LED,
- ອັດຕາ baud ທີ່ສາມາດຕັ້ງຄ່າໄດ້: 2400, 4800, 9600, 19299, 38400 bit/s.
ໂມດູນເປັນຕົວແປງ impulse.
ໂມດູນ SM3 ເຮັດວຽກເປັນຕົວແປງ impulse ແມ່ນ destined ທີ່ຈະເພີ່ມອຸປະກອນການວັດແທກທີ່ມີ inputs impulse, ເຊັ່ນ: ວັດວັດຊົ່ວໂມງ, ຄວາມຮ້ອນ-meters, gasmeters, transducers ໄຫຼ asl, ກັບລະບົບຄອມພິວເຕີ.
ຫຼັງຈາກນັ້ນ, ຕົວແປງ SM3 ຊ່ວຍໃຫ້ການອ່ານທາງໄກຂອງສະຖານະ counter ໃນລະບົບບັນຊີອັດຕະໂນມັດ. ຕົວແປງສັນຍານມີ 2 impulse inputs ແລະການໂຕ້ຕອບ RS-485 ກັບ MODBUS RTU ແລະ ASCII transmission protocols, ສິ່ງທີ່ເຮັດໃຫ້ຄໍາຮ້ອງສະຫມັກຂອງຕົນໃນລະບົບຄອມພິວເຕີກັບ Wizcon, Fix, In Touch, Genesis 32 (Iconics) ແລະໂຄງການສາຍຕາອື່ນໆ.
ຕົວກໍານົດການແປງ:
- ສອງ impulse inputs, configured ເປັນເອກະລາດ:
- ສະຖານະຂອງວັດສະດຸປ້ອນທີ່ຕັ້ງຢູ່ໃນໂຄງການ (ລະດັບສູງ ຫຼືລະດັບຕໍ່າຂອງວັດສະດຸປ້ອນ voltage),
- ການກັ່ນຕອງໂຄງການສໍາລັບການກະຕຸ້ນການປ້ອນຂໍ້ມູນທີ່ມີລະດັບຂອງໄລຍະເວລາທີ່ກໍານົດໄວ້ (ແຍກຕ່າງຫາກສໍາລັບລະດັບສູງແລະຕ່ໍາ),
– ການນັບ impulse ເຖິງມູນຄ່າ 4.294.967.295 ແລະມີການປ້ອງກັນການລົບຈາກລະດັບການນໍາໃຊ້,
- ຕົວນັບແຮງດັນທີ່ມີຄວາມເປັນໄປໄດ້ຂອງການລົບໃນທຸກເວລາ,
- ການຈົດທະບຽນບໍ່ລະເຫີຍທີ່ເກັບຮັກສານ້ໍາຂອງ impulses ນັບ,
- 4 ການຈົດທະບຽນແຍກຕ່າງຫາກປະກອບດ້ວຍຜົນໄດ້ຮັບຂອງການແບ່ງປັນມູນຄ່າຕ້ານກັບມູນຄ່ານ້ໍາຫນັກຂອງ impulses ນັບ, - ອິນເຕີເຟດການສື່ສານ RS-485 ກັບ MODBUS RTU ແລະ ASCII transmission protocols ເພື່ອເຮັດວຽກໃນລະບົບຄອມພິວເຕີດ້ວຍການສົ່ງສັນຍານ optical ໃນ diodes LED,
- ອັດຕາ baud ທີ່ສາມາດຕັ້ງຄ່າໄດ້: 2400, 4800, 9600, 19200, 134800 bit/s,
- ການໂຕ້ຕອບການຂຽນໂປລແກລມເທິງແຜ່ນດ້ານຫນ້າຂອງປະເພດ RJ (ລະດັບ TTL),
- ຫຼາຍວິທີຂອງການຕັ້ງຄ່າພາລາມິເຕີການສົ່ງຜ່ານ:
- ໂຄງການ - ໂດຍວິທີການຂອງການໂຕ້ຕອບໂຄງການ RJ ໃນແຜ່ນຫນ້າ,
- ໂຄງການ - ຈາກລະດັບຄໍາຮ້ອງສະຫມັກ, ໂດຍການລົດເມ RS-485, - ການເກັບຮັກສາຂອງສະຖານະ counter ໃນຫນ່ວຍຄວາມຈໍາທີ່ບໍ່ມີການເຫນັງຕີງຮ່ວມກັບ CRC checksum,
- ການນັບການສູນເສຍການສະຫນອງ,
- ການກວດພົບຂອງລັດສຸກເສີນ.
ຕັ້ງຄ່າໂມດູນ
- ໂມດູນ SM3 ………………………………………. 1 ຊິ້ນ
- ຄູ່ມືຜູ້ໃຊ້ …………………………………….. 1 ແຜ່ນ
- ຮູສຽບຂອງເຕົ້າຮັບ RS-232 …………….. 1 ໜ່ວຍ
ເມື່ອຖອດໂມດູນອອກ, ກະລຸນາກວດເບິ່ງຄວາມສົມບູນຂອງການຈັດສົ່ງ ແລະວ່າປະເພດ ແລະລະຫັດສະບັບຢູ່ໃນແຜ່ນຂໍ້ມູນກົງກັບຄໍາສັ່ງຫຼືບໍ່.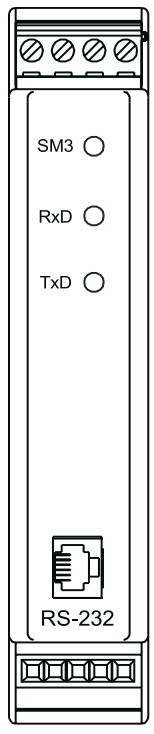 ຮູບ 1 View ຂອງໂມດູນ SM3
ຮູບ 1 View ຂອງໂມດູນ SM3
ຄວາມຕ້ອງການຄວາມປອດໄພຂັ້ນພື້ນຖານ, ຄວາມປອດໄພໃນການດໍາເນີນງານ
ສັນຍາລັກທີ່ຢູ່ໃນຄູ່ມືການບໍລິການນີ້ຫມາຍຄວາມວ່າ:
![]() ຄຳເຕືອນ!
ຄຳເຕືອນ!
ເຕືອນໄພທີ່ອາດຈະ, ສະຖານະການອັນຕະລາຍ. ມີຄວາມສໍາຄັນໂດຍສະເພາະ. ຄົນຫນຶ່ງຕ້ອງຮູ້ຈັກກັບເລື່ອງນີ້ກ່ອນທີ່ຈະເຊື່ອມຕໍ່ໂມດູນ. ການບໍ່ປະຕິບັດຕາມແຈ້ງການທີ່ຫມາຍໂດຍສັນຍາລັກເຫຼົ່ານີ້ສາມາດບາງຄັ້ງການບາດເຈັບຂອງບຸກຄະລາກອນທີ່ຮຸນແຮງແລະຄວາມເສຍຫາຍຂອງເຄື່ອງມື.
![]() ລະວັງ!
ລະວັງ!
ກໍານົດບັນທຶກທີ່ເປັນປະໂຫຍດທົ່ວໄປ. ຖ້າທ່ານສັງເກດເຫັນມັນ, ການຈັດການໂມດູນແມ່ນເຮັດໃຫ້ງ່າຍຂຶ້ນ. ຄົນຫນຶ່ງຕ້ອງເອົາໃຈໃສ່ເລື່ອງນີ້, ເມື່ອໂມດູນເຮັດວຽກບໍ່ສອດຄ່ອງຕາມຄວາມຄາດຫວັງ. ຜົນສະທ້ອນທີ່ເປັນໄປໄດ້ຖ້າບໍ່ສົນໃຈ!
ໃນຂອບເຂດຄວາມປອດໄພ, ໂມດູນຕອບສະຫນອງຄວາມຕ້ອງການຂອງມາດຕະຖານ EN 61010 -1.
ຂໍ້ສັງເກດກ່ຽວກັບຄວາມປອດໄພຂອງຜູ້ປະຕິບັດງານ:
1. ທົ່ວໄປ ![]()
- ໂມດູນ SM3 ແມ່ນຈຸດຫມາຍປາຍທາງທີ່ຈະຕິດຕັ້ງຢູ່ເທິງລາງລົດໄຟ 35 ມມ.
- ການໂຍກຍ້າຍທີ່ບໍ່ມີການອະນຸຍາດຂອງທີ່ຢູ່ອາໄສທີ່ຕ້ອງການ, ການນໍາໃຊ້ທີ່ບໍ່ເຫມາະສົມ, ການຕິດຕັ້ງຫຼືການດໍາເນີນງານທີ່ບໍ່ຖືກຕ້ອງສ້າງຄວາມສ່ຽງຕໍ່ການບາດເຈັບຕໍ່ບຸກຄະລາກອນຫຼືຄວາມເສຍຫາຍຂອງອຸປະກອນ. ສໍາລັບລາຍລະອຽດເພີ່ມເຕີມກະລຸນາສຶກສາຄູ່ມືຂອງຜູ້ໃຊ້.
- ຢ່າເຊື່ອມຕໍ່ໂມດູນກັບເຄືອຂ່າຍໂດຍຜ່ານ autotransformer.
- ການເຄື່ອນໄຫວທັງໝົດກ່ຽວກັບການຂົນສົ່ງ, ການຕິດຕັ້ງ, ການມອບໝາຍ, ການບໍາລຸງຮັກສາຕ້ອງໄດ້ຮັບການປະຕິບັດໂດຍບຸກຄະລາກອນທີ່ມີຄຸນນະພາບ, ມີຄວາມຊຳນານ ແລະ ລະບຽບການແຫ່ງຊາດເພື່ອປ້ອງກັນອຸປະຕິເຫດ.
- ອີງຕາມຂໍ້ມູນຄວາມປອດໄພພື້ນຖານນີ້, ບຸກຄະລາກອນທີ່ມີຄຸນວຸດທິ, ຊໍານິຊໍານານແມ່ນບຸກຄົນທີ່ຄຸ້ນເຄີຍກັບການຕິດຕັ້ງ, ການປະກອບ, ການມອບຫມາຍ, ແລະການດໍາເນີນງານຂອງຜະລິດຕະພັນແລະຜູ້ທີ່ມີຄຸນສົມບັດທີ່ຈໍາເປັນສໍາລັບການປະກອບອາຊີບຂອງເຂົາເຈົ້າ.
- ເຕົ້າຮັບ RS-232 ໃຫ້ບໍລິການພຽງແຕ່ເຊື່ອມຕໍ່ອຸປະກອນ (ຮູບ 5) ເຮັດວຽກກັບ MODBUS Protocol. ວາງຮູສຽບຢູ່ໃນເຕົ້າຮັບໂມດູນ RS-232 ຖ້າເຕົ້າສຽບບໍ່ໄດ້ໃຊ້.
2. ການຂົນສົ່ງ, ການເກັບຮັກສາ
- ກະລຸນາສັງເກດບັນທຶກກ່ຽວກັບການຂົນສົ່ງ, ການເກັບຮັກສາແລະການຈັດການທີ່ເຫມາະສົມ.
- ສັງເກດເບິ່ງເງື່ອນໄຂສະພາບອາກາດທີ່ລະບຸໄວ້ໃນສະເພາະ.
3. ການຕິດຕັ້ງ
- ໂມດູນຕ້ອງໄດ້ຮັບການຕິດຕັ້ງຕາມກົດລະບຽບແລະຄໍາແນະນໍາທີ່ລະບຸໄວ້ໃນຄູ່ມືຂອງຜູ້ໃຊ້ນີ້.
- ຮັບປະກັນການຈັດການທີ່ເຫມາະສົມແລະຫຼີກເວັ້ນຄວາມກົດດັນກົນຈັກ.
- ຢ່າງໍອົງປະກອບໃດໆແລະບໍ່ປ່ຽນແປງໄລຍະຫ່າງຂອງ insulation.
- ຢ່າແຕະຕ້ອງອົງປະກອບອີເລັກໂທຣນິກ ແລະ ຕິດຕໍ່ພົວພັນ.
- ເຄື່ອງມືອາດຈະມີອົງປະກອບທີ່ລະອຽດອ່ອນ electrostatically, ຊຶ່ງສາມາດໄດ້ຮັບຄວາມເສຍຫາຍໄດ້ຢ່າງງ່າຍດາຍໂດຍການຈັບທີ່ບໍ່ເຫມາະສົມ.
- ຫ້າມທຳລາຍ ຫຼືທຳລາຍອົງປະກອບໄຟຟ້າໃດໆ ເພາະອາດເປັນອັນຕະລາຍຕໍ່ສຸຂະພາບຂອງເຈົ້າ!
4. ການເຊື່ອມຕໍ່ໄຟຟ້າ
 ກ່ອນທີ່ຈະເປີດເຄື່ອງມື, ຫນຶ່ງຕ້ອງໄດ້ກວດເບິ່ງຄວາມຖືກຕ້ອງຂອງການເຊື່ອມຕໍ່ກັບເຄືອຂ່າຍ.
ກ່ອນທີ່ຈະເປີດເຄື່ອງມື, ຫນຶ່ງຕ້ອງໄດ້ກວດເບິ່ງຄວາມຖືກຕ້ອງຂອງການເຊື່ອມຕໍ່ກັບເຄືອຂ່າຍ.- ໃນກໍລະນີຂອງການເຊື່ອມຕໍ່ terminal ປ້ອງກັນກັບຜູ້ນໍາແຍກຕ່າງຫາກ, ມັນຈໍາເປັນຕ້ອງຈື່ຈໍາທີ່ຈະເຊື່ອມຕໍ່ມັນກ່ອນທີ່ຈະເຊື່ອມຕໍ່ຂອງອຸປະກອນກັບຕົ້ນຕໍ.
- ໃນເວລາທີ່ເຮັດວຽກກ່ຽວກັບເຄື່ອງມືທີ່ມີຊີວິດ, ກົດລະບຽບແຫ່ງຊາດທີ່ໃຊ້ໃນການປ້ອງກັນອຸປະຕິເຫດຕ້ອງໄດ້ຮັບການປະຕິບັດຕາມ.
- ການຕິດຕັ້ງໄຟຟ້າຕ້ອງຖືກປະຕິບັດຕາມກົດລະບຽບທີ່ເຫມາະສົມ (ສາຍຂ້າມສາຍ, ຟິວ, ການເຊື່ອມຕໍ່ PE). ຂໍ້ມູນເພີ່ມເຕີມສາມາດໄດ້ຮັບຈາກຄູ່ມືຂອງຜູ້ໃຊ້.
- ເອກະສານປະກອບມີຂໍ້ມູນກ່ຽວກັບການຕິດຕັ້ງທີ່ສອດຄ່ອງກັບ EMC (ໄສ້, ພື້ນດິນ, ການກັ່ນຕອງແລະສາຍ). ບັນທຶກເຫຼົ່ານີ້ຕ້ອງຖືກສັງເກດສໍາລັບທຸກຜະລິດຕະພັນທີ່ມີເຄື່ອງຫມາຍ CE.
- ຜູ້ຜະລິດລະບົບການວັດແທກຫຼືອຸປະກອນທີ່ຕິດຕັ້ງແມ່ນຮັບຜິດຊອບຕໍ່ການປະຕິບັດຕາມຄ່າຈໍາກັດທີ່ຕ້ອງການໂດຍກົດຫມາຍ EMC.
5. ການດໍາເນີນງານ
- ລະບົບການວັດແທກລວມທັງໂມດູນ SM3, ຕ້ອງໄດ້ຮັບການຕິດຕັ້ງອຸປະກອນປ້ອງກັນຕາມມາດຕະຖານແລະກົດລະບຽບທີ່ສອດຄ້ອງກັນເພື່ອປ້ອງກັນອຸປະຕິເຫດ.
- ຫຼັງຈາກເຄື່ອງມືໄດ້ຖືກຕັດການເຊື່ອມຕໍ່ຈາກການສະຫນອງ voltage, ອົງປະກອບທີ່ມີຊີວິດແລະການເຊື່ອມຕໍ່ພະລັງງານຈະຕ້ອງບໍ່ຖືກແຕະຕ້ອງທັນທີເພາະວ່າຕົວເກັບປະຈຸສາມາດຖືກສາກໄຟໄດ້.
- ທີ່ຢູ່ອາໄສຕ້ອງຖືກປິດໃນລະຫວ່າງການປະຕິບັດງານ.
6. ບໍາລຸງຮັກສາແລະການບໍລິການ
- ກະລຸນາສັງເກດເອກະສານຂອງຜູ້ຜະລິດ.
- ອ່ານບັນທຶກຄວາມປອດໄພສະເພາະຂອງຜະລິດຕະພັນ ແລະແອັບພລິເຄຊັນທັງໝົດໃນຄູ່ມືຜູ້ໃຊ້ນີ້.
- ກ່ອນທີ່ຈະເອົາອຸປະກອນອອກຈາກເຮືອນ, ຄົນຫນຶ່ງຕ້ອງປິດການສະຫນອງ.
![]() ການໂຍກຍ້າຍຂອງທີ່ຢູ່ອາໄສຂອງເຄື່ອງມືໃນໄລຍະສັນຍາຮັບປະກັນອາດຈະເຮັດໃຫ້ການຍົກເລີກຂອງຕົນ.
ການໂຍກຍ້າຍຂອງທີ່ຢູ່ອາໄສຂອງເຄື່ອງມືໃນໄລຍະສັນຍາຮັບປະກັນອາດຈະເຮັດໃຫ້ການຍົກເລີກຂອງຕົນ.
ການຕິດຕັ້ງ
4.1. ການແກ້ໄຂໂມດູນ
ໂມດູນໄດ້ຖືກອອກແບບເພື່ອສ້ອມແຊມເທິງລົດໄຟ 35 ມມ (EN 60715). ທີ່ຢູ່ອາໄສຂອງໂມດູນແມ່ນເຮັດດ້ວຍພາດສະຕິກທີ່ສາມາດດັບໄຟດ້ວຍຕົນເອງ.
ຂະໜາດເຮືອນ: 22.5 x 120 x 100 ມມ. ຫນຶ່ງຄວນເຊື່ອມຕໍ່ສາຍໄຟພາຍນອກທີ່ມີສ່ວນຂ້າມຂອງ 2.5 mm² (ຈາກຂ້າງສະຫນອງ) ແລະຂອງ 1.5 mm² (ຈາກຂ້າງສັນຍານ input). 4.2. ລາຍລະອຽດ Terminal
4.2. ລາຍລະອຽດ Terminal
ຫນຶ່ງຕ້ອງເຊື່ອມຕໍ່ການສະຫນອງແລະສັນຍານພາຍນອກໂດຍສອດຄ່ອງກັບ fig. ຂໍ້ທີ 3, 4 ແລະ 5. ການນຳອອກເປັນພິເສດແມ່ນໄດ້ອະທິບາຍໄວ້ໃນຕາຕະລາງ 1.
ໝາຍເຫດ: ຫນຶ່ງຕ້ອງໄດ້ເອົາໃຈໃສ່ໂດຍສະເພາະກ່ຽວກັບການເຊື່ອມຕໍ່ທີ່ຖືກຕ້ອງຂອງສັນຍານພາຍນອກ (ເບິ່ງຕາຕະລາງ 1).
 ມີສາມ diodes ຢູ່ເທິງແຜ່ນດ້ານຫນ້າ:
ມີສາມ diodes ຢູ່ເທິງແຜ່ນດ້ານຫນ້າ:
- ສີຂຽວ - ເມື່ອແສງ, ສັນຍານການສະຫນອງ,
- ສີຂຽວ (RxD) - ສັນຍານການຮັບຂໍ້ມູນໂດຍໂມດູນ,
- ສີເຫລືອງ (TxD) – ສັນຍານການສົ່ງຂໍ້ມູນໂດຍໂມດູນ.
ລາຍລະອຽດຂອງການນໍາໃຊ້ໂມດູນ SM3
ຕາຕະລາງ 1
|
ສະຖານີnr |
ລາຍລະອຽດ Terminal |
| 1 | ເສັ້ນ GND ຂອງ logic inputs |
| 2 | IN1 line – logic input No 1 |
| 3 | 5 V dc ສາຍ |
| 4 | IN2 line – logic input No 2 |
| 5 | ເສັ້ນ GND ຂອງການໂຕ້ຕອບ RS-485 |
| 6, 7 | ສາຍສະຫນອງໂມດູນ |
| 8 | ເສັ້ນຂອງການໂຕ້ຕອບ RS-485 ທີ່ມີ optoisolation |
| 9 | ເສັ້ນ B ຂອງການໂຕ້ຕອບ RS-485 ກັບ optoisolation |
ວິທີການທີ່ເປັນຕົວຢ່າງຂອງການເຊື່ອມຕໍ່ການປ້ອນຂໍ້ມູນຕາມເຫດຜົນແມ່ນໄດ້ນໍາສະເຫນີຂ້າງລຸ່ມນີ້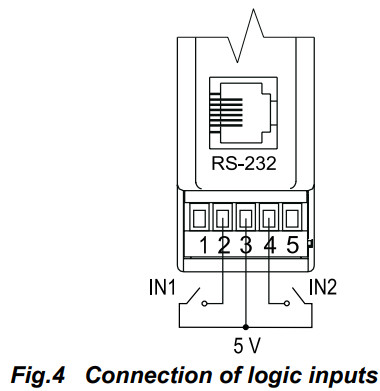
 ໝາຍເຫດ:
ໝາຍເຫດ:
ການພິຈາລະນາການແຊກແຊງທາງແມ່ເຫຼັກໄຟຟ້າ, ຄົນຫນຶ່ງຕ້ອງໃຊ້ສາຍປ້ອງກັນເພື່ອເຊື່ອມຕໍ່ສັນຍານການປ້ອນຂໍ້ມູນຕາມເຫດຜົນແລະສັນຍານການໂຕ້ຕອບ RS-485. ໄສ້ຕ້ອງເຊື່ອມຕໍ່ກັບຈຸດປ້ອງກັນໃນຈຸດດຽວ. ການສະຫນອງຕ້ອງໄດ້ຮັບການເຊື່ອມຕໍ່ດ້ວຍສາຍສອງສາຍທີ່ມີເສັ້ນຜ່າກາງຂອງສາຍທີ່ເຫມາະສົມ, ຮັບປະກັນການປົກປ້ອງຂອງມັນໂດຍການຕັດການຕິດຕັ້ງ.
ການບໍລິການ
ຫຼັງຈາກການເຊື່ອມຕໍ່ສັນຍານພາຍນອກແລະປ່ຽນການສະຫນອງ, ໂມດູນ SM3 ແມ່ນພ້ອມທີ່ຈະເຮັດວຽກ. ໄດໂອດສີຂຽວທີ່ເຮັດໃຫ້ມີແສງເປັນສັນຍານການດໍາເນີນການຂອງໂມດູນ. diode ສີຂຽວ (RxD) ສັນຍານຂອງໂມດູນ polling, ຢ່າງໃດກໍຕາມ diode ສີເຫຼືອງ (TxD), ຄໍາຕອບຂອງໂມດູນ. ໄດໂອດຄວນເຮັດໃຫ້ມີແສງຮອບວຽນໃນລະຫວ່າງການສົ່ງຂໍ້ມູນ, ທັງຜ່ານອິນເຕີເຟດ RS-232 ແລະ RS-485. ສັນຍານ "+" (terminal 3) ແມ່ນຜົນຜະລິດ 5 V ທີ່ມີການໂຫຼດ 50 mA. ຫນຶ່ງສາມາດນໍາໃຊ້ມັນສໍາລັບການສະຫນອງວົງຈອນພາຍນອກ.
ຕົວກໍານົດການໂມດູນທັງຫມົດສາມາດໄດ້ຮັບການດໍາເນີນໂຄງການໂດຍວິທີການ RS-232 ຫຼື RS-485. ພອດ RS-232 ມີຕົວກໍານົດການສົ່ງຕໍ່ຄົງທີ່ໃນການປະຕິບັດຕາມຂໍ້ມູນດ້ານວິຊາການ, ສິ່ງທີ່ເຮັດໃຫ້ການເຊື່ອມຕໍ່ກັບໂມດູນ, ເຖິງແມ່ນວ່າໃນເວລາທີ່ກໍານົດການກໍານົດໂຄງການຂອງຜົນຜະລິດດິຈິຕອນ RS-485 ແມ່ນບໍ່ຮູ້ຈັກ (ທີ່ຢູ່, ຮູບແບບ, ອັດຕາ).
ມາດຕະຖານ RS-485 ອະນຸຍາດໃຫ້ເຊື່ອມຕໍ່ໂດຍກົງກັບ 32 ອຸປະກອນໃນການເຊື່ອມຕໍ່ serial ດຽວຍາວ 1200 m. ເພື່ອເຊື່ອມຕໍ່ອຸປະກອນທີ່ມີຈໍານວນທີ່ສູງຂຶ້ນ, ມັນຈໍາເປັນຕ້ອງໃຊ້ອຸປະກອນທີ່ແຍກຕົວກາງເພີ່ມເຕີມ (ຕົວຢ່າງ PD51 converter/repeater). ລັກສະນະການເຊື່ອມຕໍ່ອິນເຕີເຟດແມ່ນໃຫ້ຢູ່ໃນຄູ່ມືຜູ້ໃຊ້ຂອງໂມດູນ (ຮູບ 5). ເພື່ອໃຫ້ໄດ້ລະບົບສາຍສົ່ງທີ່ຖືກຕ້ອງ, ມັນຈໍາເປັນຕ້ອງເຊື່ອມຕໍ່ສາຍ A ແລະ B ໃນຂະຫນານກັບອຸປະກອນອື່ນໆ. ການເຊື່ອມຕໍ່ຄວນຈະໄດ້ຮັບການເຮັດໃຫ້ໄດ້ໂດຍສາຍປ້ອງກັນ. ໄສ້ຕ້ອງເຊື່ອມຕໍ່ກັບຈຸດປ້ອງກັນໃນຈຸດດຽວ. ສາຍ GND ໃຫ້ບໍລິການໃນການປົກປ້ອງເພີ່ມເຕີມຂອງສາຍການໂຕ້ຕອບໃນການເຊື່ອມຕໍ່ຍາວ. ຫນຶ່ງຕ້ອງເຊື່ອມຕໍ່ມັນກັບ terminal ປ້ອງກັນ (ທີ່ບໍ່ຈໍາເປັນສໍາລັບການດໍາເນີນງານການໂຕ້ຕອບທີ່ຖືກຕ້ອງ).
ເພື່ອໃຫ້ໄດ້ຮັບການເຊື່ອມຕໍ່ກັບຄອມພິວເຕີ PC ຜ່ານພອດ RS-485, ຕົວແປງການໂຕ້ຕອບ RS-232/RS-485 ແມ່ນຂາດບໍ່ໄດ້ (ເຊັ່ນ: ເຄື່ອງແປງ PD51) ຫຼືບັດ RS-485. ເຄື່ອງຫມາຍຂອງສາຍສົ່ງສໍາລັບບັດໃນຄອມພິວເຕີ PC ແມ່ນຂຶ້ນກັບຜູ້ຜະລິດບັດ. ເພື່ອຮັບຮູ້ການເຊື່ອມຕໍ່ຜ່ານພອດ RS-232, ສາຍທີ່ເພີ່ມໃສ່ໂມດູນແມ່ນພຽງພໍ. ລັກສະນະຂອງການເຊື່ອມຕໍ່ພອດທັງສອງ (RS-232 ແລະ RS-485) ໄດ້ຖືກນໍາສະເຫນີຢູ່ໃນ Fig.5.
ໂມດູນສາມາດເຊື່ອມຕໍ່ກັບອຸປະກອນ Master ໄດ້ຜ່ານພອດອິນເຕີເຟດດຽວເທົ່ານັ້ນ. ໃນກໍລະນີ f ການເຊື່ອມຕໍ່ພ້ອມໆກັນຂອງທັງສອງພອດ, ໂມດູນຈະເຮັດວຽກຢ່າງຖືກຕ້ອງກັບພອດ RS-232.
5.1. ລາຍລະອຽດຂອງການປະຕິບັດອະນຸສັນຍາ MODBUS
ອະນຸສັນຍາການສົ່ງຜ່ານອະທິບາຍວິທີການແລກປ່ຽນຂໍ້ມູນລະຫວ່າງອຸປະກອນໂດຍຜ່ານການໂຕ້ຕອບ serial.
ອະນຸສັນຍາ MODBUS ໄດ້ຖືກປະຕິບັດຢູ່ໃນໂມດູນໂດຍປະຕິບັດຕາມຂໍ້ກໍາຫນົດ PI-MBUS-300 Rev G ຂອງບໍລິສັດ Modicon.
ຊຸດຂອງຕົວກໍານົດການໂຕ້ຕອບ serial ຂອງໂມດູນໃນ MODBUS protocol:
– ທີ່ຢູ່ໂມດູນ: 1…247
- ອັດຕາບິດ: 2400, 4800, 19200, 38400 bit/s
- ຮູບແບບການປະຕິບັດ: ASCII, RTU
– ຫນ່ວຍງານຂໍ້ມູນຂ່າວສານ: ASCII: 8N1, 7E1, 7O1,
RTU: 8N2, 8E1, 8O1, 8N1
- ເວລາຕອບສະຫນອງສູງສຸດ: 300 ms
ການຕັ້ງຄ່າພາລາມິເຕີຂອງການໂຕ້ຕອບ serial ແມ່ນໄດ້ອະທິບາຍຢູ່ໃນສ່ວນເພີ່ມເຕີມຂອງຄູ່ມືຜູ້ໃຊ້ນີ້. ມັນປະກອບດ້ວຍການຕັ້ງຖິ່ນຖານຂອງອັດຕາ baud (ພາລາມິເຕີອັດຕາ), ທີ່ຢູ່ອຸປະກອນ (ພາລາມິເຕີທີ່ຢູ່) ແລະປະເພດຂອງຫນ່ວຍງານຂໍ້ມູນ (ພາລາມິເຕີຮູບແບບ).
ໃນກໍລະນີຂອງການເຊື່ອມຕໍ່ໂມດູນກັບຄອມພິວເຕີຜ່ານສາຍ RS-232, ໂມດູນກໍານົດຕົວກໍານົດການສົ່ງອັດຕະໂນມັດກ່ຽວກັບຄ່າ:
ອັດຕາ Baud: 9600 b/s
ຮູບແບບການເຮັດວຽກ: RTU 8N1
ທີ່ຢູ່: 1
ໝາຍເຫດ: ແຕ່ລະໂມດູນທີ່ເຊື່ອມຕໍ່ກັບເຄືອຂ່າຍການສື່ສານຕ້ອງ:
- ມີທີ່ຢູ່ເປັນເອກະລັກ, ທີ່ແຕກຕ່າງຈາກທີ່ຢູ່ຂອງອຸປະກອນອື່ນໆ c ເຊື່ອມຕໍ່ໃນເຄືອຂ່າຍ,
- ມີອັດຕາ baud ດຽວກັນແລະປະເພດຫນ່ວຍບໍລິການຂໍ້ມູນຂ່າວສານ,
- ການສົ່ງອອກຄໍາສັ່ງທີ່ຢູ່ "0" ຖືກກໍານົດເປັນຮູບແບບການສົ່ງອອກຢ່າງກວ້າງຂວາງ (ການສົ່ງກັບອຸປະກອນຈໍານວນຫຼາຍ).
5.2. ລາຍລະອຽດຂອງຫນ້າທີ່ອະນຸສັນຍາ MODBUS
ປະຕິບັດຕາມຟັງຊັນໂປຣໂຕຄໍ MODBUS ໄດ້ຖືກປະຕິບັດຢູ່ໃນໂມດູນ SM3:
ລາຍລະອຽດຂອງຫນ້າທີ່ອະນຸສັນຍາ MODBUS
ຕາຕະລາງ 2
| ລະຫັດ |
ຄວາມຫມາຍ |
| 03 (03 h) | ການອ່ານການລົງທະບຽນ n |
| 04 (04 h) | ການອ່ານການລົງທະບຽນ n-input |
| 06 (06 h) | ຂຽນທະບຽນດຽວ |
| 16 (10 h) | ຂຽນຂອງ n-registers |
| 17 (11 h) | ການກໍານົດອຸປະກອນສໍາລອງ |
ການອ່ານການລົງທະບຽນ n (ລະຫັດ 03h)
ຟັງຊັນບໍ່ສາມາດເຂົ້າເຖິງໄດ້ໃນໂຫມດກະຈາຍຂໍ້ມູນ.
Example: Readout ຂອງ 2 ລົງທະບຽນເລີ່ມຕົ້ນຈາກການລົງທະບຽນທີ່ມີທີ່ຢູ່ 1DBDh (7613):
ຮ້ອງຂໍ:
| ທີ່ຢູ່ອຸປະກອນ | ຟັງຊັນ | ລົງທະບຽນ ທີ່ຢູ່ ສະບາຍດີ |
ລົງທະບຽນ ທີ່ຢູ່ Lo |
ຈໍານວນ ລົງທະບຽນສະບາຍດີ |
ຈໍານວນ ລົງທະບຽນ Lo |
ເຊັກsum CRC |
| 01 | 03 | 1D | BD | 00 | 02 | 52 43 |
ຄໍາຕອບ:
| ທີ່ຢູ່ອຸປະກອນ | ຟັງຊັນ | ຈໍານວນ bytes | ມູນຄ່າຈາກທະບຽນ 1DBD (7613) | ຄ່າຈາກທະບຽນ 1DBE (7614) | Checksum CRC | ||||||
| 01 | 03 | 08 | 3F | 80 | 00 | 00 | 40 | 00 | 00 | 00 | 42 8 ບ |
Readout ຂອງ N- input registers (kode 04h)
ຟັງຊັນບໍ່ສາມາດເຂົ້າເຖິງໄດ້ໃນໂຫມດກະຈາຍຂໍ້ມູນ.
Example: readout ຂອງຫນຶ່ງລົງທະບຽນທີ່ມີທີ່ຢູ່ 0FA3h (4003) ເລີ່ມຕົ້ນຈາກການລົງທະບຽນດ້ວຍ 1DBDh (7613).
ຮ້ອງຂໍ:
| ທີ່ຢູ່ອຸປະກອນ | ຟັງຊັນ | ລົງທະບຽນ ທີ່ຢູ່ ສະບາຍດີ |
ລົງທະບຽນ ທີ່ຢູ່ Lo |
ຈໍານວນ ລົງທະບຽນສະບາຍດີ |
ຈໍານວນ ລົງທະບຽນ Lo |
ເຊັກsum CRC |
| 01 | 04 | 0F | A3 | 00 | 01 | C2 FC |
ຄໍາຕອບ:
| ທີ່ຢູ່ອຸປະກອນ | ຟັງຊັນ | ຈໍານວນ bytes | ມູນຄ່າຈາກ ລົງທະບຽນ 0FA3 (4003) |
Checksum CRC | |
| 01 | 04 | 02 | 00 | 01 | 78 F0 |
ຂຽນມູນຄ່າລົງໃນທະບຽນ (ລະຫັດ 06h)
ຟັງຊັນແມ່ນສາມາດເຂົ້າເຖິງໄດ້ໃນໂຫມດການອອກອາກາດ.
Example: ຂຽນທະບຽນດ້ວຍທີ່ຢູ່ 1DBDh (7613).
ຮ້ອງຂໍ:
| ທີ່ຢູ່ອຸປະກອນ | ຟັງຊັນ | ລົງທະບຽນທີ່ຢູ່ Hi | ລົງທະບຽນທີ່ຢູ່ Lo | ມູນຄ່າຈາກທະບຽນ 1DBD (7613) | Checksum CRC | |||
| 01 | 06 | 1D | BD | 3F | 80 | 00 | 00 | 85 AD |
ຄໍາຕອບ:
| ທີ່ຢູ່ອຸປະກອນ | ຟັງຊັນ | ລົງທະບຽນ ທີ່ຢູ່ ສະບາຍດີ |
ລົງທະບຽນທີ່ຢູ່ Lo |
ມູນຄ່າຈາກທະບຽນ 1DBD (7613) | Checksum CRC | |||
| 01 | 06 | 1D | BD | 3F | 80 | 00 | 00 | 85 AD |
ຂຽນໃສ່ n-registers (ລະຫັດ 10h)
ຟັງຊັນແມ່ນສາມາດເຂົ້າເຖິງໄດ້ໃນໂຫມດການກະຈາຍສຽງ.
Example: ຂຽນ 2 ລົງທະບຽນເລີ່ມຕົ້ນຈາກການລົງທະບຽນດ້ວຍ 1DBDh (7613) ad-
ຮ້ອງຂໍ:
| ອຸປະກອນ ທີ່ຢູ່ |
ຟັງຊັນ | ລົງທະບຽນ ທີ່ຢູ່ |
ຈໍານວນ ລົງທະບຽນ |
ຈໍານວນ bytes | ມູນຄ່າຈາກການລົງທະບຽນ 1DBD (7613) |
ມູນຄ່າຈາກ ລົງທະບຽນ 1DBE (7614) |
ກວດສອບ- ລວມ CRC |
||||||||
| Hi | Lo | Hi | Lo | ||||||||||||
| 01 | 10 | 1D | BD | 00 | 02 | 08 | 3F | 80 | 00 | 00 | 40 | 00 | 00 | 00 | 03 09 |
ຄໍາຕອບ:
| ທີ່ຢູ່ອຸປະກອນ | ຟັງຊັນ | ລົງທະບຽນ ທີ່ຢູ່ ສະບາຍດີ |
ລົງທະບຽນ ທີ່ຢູ່ Lo |
ຈໍານວນ ລົງທະບຽນສະບາຍດີ |
ຈໍານວນ ລົງທະບຽນ Lo |
ເຊັກsum (CRC) |
| 01 | 10 | 1D | BD | 00 | 02 | D7 80 |
ລາຍງານການລະບຸອຸປະກອນ (ລະຫັດ 11h)
ຮ້ອງຂໍ:
| ທີ່ຢູ່ອຸປະກອນ | ຟັງຊັນ | Checksum (CRC) |
| 01 | 11 | C0 2C |
ຄໍາຕອບ:
| ທີ່ຢູ່ອຸປະກອນ | ຟັງຊັນ | ຈໍານວນ bytes | ຕົວລະບຸອຸປະກອນ | ສະຖານະອຸປະກອນ | ໝາຍເລກເວີຊັນຊອບແວ | ເຊັກsum |
| 01 | 11 | 06 | 8C | FF | 3F 80 00 00 | A6 F3 |
ທີ່ຢູ່ອຸປະກອນ – 01
ຟັງຊັ່ນ – function No: 0x11;
ຈໍານວນໄບຕ໌ – 0x06
ຕົວລະບຸອຸປະກອນ – 0x8B
ສະຖານະອຸປະກອນ - 0xFF
ເວີຊັ່ນຊອບແວ No – ສະບັບປະຕິບັດຢູ່ໃນໂມດູນ: 1.00
XXXX – ຕົວແປ 4-byte ຂອງປະເພດ float
Checksum – 2 bytes ໃນກໍລະນີຂອງການເຮັດວຽກໃນຮູບແບບ RTU
- 1 byte ໃນກໍລະນີເຮັດວຽກຢູ່ໃນໂຫມດ ASCII
5.3. ແຜນທີ່ຂອງທະບຽນໂມດູນ
ລົງທະບຽນແຜນທີ່ຂອງໂມດູນ SM3
| ທີ່ຢູ່ ຊ່ວງ | ມູນຄ່າ ປະເພດ | ລາຍລະອຽດ |
| 4000-4100 | int, float (16 bits) | ມູນຄ່າແມ່ນຖືກຈັດໃສ່ໃນທະບຽນ 16-bit. ການລົງທະບຽນແມ່ນພຽງແຕ່ສໍາລັບການອ່ານ. |
| 4200-4300 | int (16 bits) | ມູນຄ່າແມ່ນຖືກຈັດໃສ່ໃນທະບຽນ 16-bit. ເນື້ອໃນການລົງທະບຽນກົງກັບເນື້ອໃນການລົງທະບຽນ 32-bit ຈາກພື້ນທີ່ 7600. ການລົງທະບຽນສາມາດອ່ານອອກແລະຂຽນ. |
| 7500-7600 | ລອຍ (32 ບິດ) | ມູນຄ່າແມ່ນຖືກຈັດໃສ່ໃນທະບຽນ 32-bit. ການລົງທະບຽນແມ່ນພຽງແຕ່ສໍາລັບການອ່ານ. |
| 7600-7700 | ລອຍ (32 ບິດ) | ມູນຄ່າແມ່ນຖືກຈັດໃສ່ໃນທະບຽນ 32-bit. ການລົງທະບຽນສາມາດອ່ານອອກແລະຂຽນ. |
5.4. ຊຸດລົງທະບຽນໂມດູນ
ຊຸດລົງທະບຽນສໍາລັບການອ່ານໂມດູນ SM3.
| ມູນຄ່າແມ່ນຖືກຈັດໃສ່ໃນທະບຽນ 16-bit | ຊື່ | ຊ່ວງ | ປະເພດການລົງທະບຽນ | ຊື່ປະລິມານ |
| 4000 | ຕົວລະບຸ | – | int | ການລະບຸອຸປະກອນຄົງທີ່ (0x8B) |
|
4001 |
ສະຖານະພາບ 1 |
int |
ສະຖານະ 1 ແມ່ນການລົງທະບຽນທີ່ອະທິບາຍສະຖານະປັດຈຸບັນຂອງການປ້ອນຂໍ້ມູນຕາມເຫດຜົນ | |
| 4002 | ສະຖານະພາບ 2 | – | int | ສະຖານະ 2 ແມ່ນການລົງທະບຽນທີ່ອະທິບາຍເຖິງຕົວກໍານົດການສົ່ງຜ່ານປະຈຸບັນ. |
| 4003 | W1 | 0… 1 | int | ຄ່າຂອງສະຖານະທີ່ອ່ານອອກຂອງວັດສະດຸປ້ອນ 1 |
| 4004 | W2 | 0… 1 | int | ຄ່າຂອງສະຖານະທີ່ອ່ານອອກຂອງວັດສະດຸປ້ອນ 2 |
| 4005 | WMG1_H |
– |
ຍາວ |
ຜົນໄດ້ຮັບໂດຍຜ່ານການເຮັດໃຫ້ການປະຕິບັດການແບ່ງຂອງຕົວນັບຕົ້ນຕໍແລະມູນຄ່ານ້ໍາ, ສໍາລັບການປ້ອນຂໍ້ມູນ 1 (ການຈົດທະບຽນນັບຈໍານວນລ້ານຂອງຜົນໄດ້ຮັບທັງຫມົດ) - ຄໍາທີ່ສູງກວ່າ. |
| 4006 | WMG1_L | ຜົນໄດ້ຮັບໂດຍຜ່ານການເຮັດໃຫ້ການປະຕິບັດການແບ່ງຂອງຕົວນັບຕົ້ນຕໍແລະມູນຄ່ານ້ໍາ, ສໍາລັບການປ້ອນຂໍ້ມູນ 1 (ການຈົດທະບຽນນັບຈໍານວນຂອງລ້ານຂອງຜົນໄດ້ຮັບທັງຫມົດ) - ຄໍາຕ່ໍາ. | ||
| 4007 | WMP1_H |
– |
ຍາວ |
ຜົນໄດ້ຮັບທີ່ໄດ້ຮັບໂດຍຜ່ານການປະຕິບັດການແບ່ງສ່ວນຂອງຕົວນັບຕົ້ນຕໍແລະມູນຄ່ານ້ໍາຫນັກ, ສໍາລັບການປ້ອນຂໍ້ມູນ 1 (ການລົງທະບຽນນັບຈໍານວນລ້ານຂອງຜົນໄດ້ຮັບທັງຫມົດ) - ຄໍາທີ່ສູງກວ່າ. |
| 4008 | WMP1_L | ຜົນໄດ້ຮັບໂດຍຜ່ານການເຮັດໃຫ້ການປະຕິບັດການແບ່ງຂອງຕົວນັບຕົ້ນຕໍແລະມູນຄ່ານ້ໍາ, ສໍາລັບການປ້ອນຂໍ້ມູນ 1 (ການຈົດທະບຽນນັບຈໍານວນຂອງລ້ານຂອງຜົນໄດ້ຮັບທັງຫມົດ) - ຄໍາຕ່ໍາ. | ||
| 4009 | WMG2_H |
– |
ຍາວ |
ຜົນໄດ້ຮັບທີ່ໄດ້ຮັບໂດຍຜ່ານການປະຕິບັດການແບ່ງສ່ວນຂອງຕົວນັບຕົ້ນຕໍແລະມູນຄ່ານ້ໍາຫນັກ, ສໍາລັບການປ້ອນຂໍ້ມູນ 2 (ການລົງທະບຽນນັບຈໍານວນລ້ານຂອງຜົນໄດ້ຮັບທັງຫມົດ) - ຄໍາທີ່ສູງກວ່າ. |
| 4010 | WMG2_L | ຜົນໄດ້ຮັບໂດຍການເຮັດໃຫ້ການດໍາເນີນງານການແບ່ງຂອງຕົວເລກຕົ້ນຕໍແລະມູນຄ່ານ້ໍາຫນັກ, ສໍາລັບການປ້ອນຂໍ້ມູນ 2 (ການຈົດທະບຽນນັບຈໍານວນຂອງລ້ານຂອງຜົນໄດ້ຮັບທັງຫມົດ) - ຄໍາທີ່ຕ່ໍາ. |
| 4011 | WMP2_H |
– |
ຍາວ |
ຜົນໄດ້ຮັບທີ່ໄດ້ຮັບໂດຍຜ່ານການປະຕິບັດການແບ່ງສ່ວນຂອງຕົວນັບຕົ້ນຕໍແລະມູນຄ່ານ້ໍາຫນັກ, ສໍາລັບການປ້ອນຂໍ້ມູນ 2 (ການລົງທະບຽນນັບຈໍານວນລ້ານຂອງຜົນໄດ້ຮັບທັງຫມົດ) - ຄໍາທີ່ສູງກວ່າ. |
| 4012 | WMP2_L | ຜົນໄດ້ຮັບໂດຍຜ່ານການເຮັດໃຫ້ການປະຕິບັດການແບ່ງຂອງຕົວນັບຕົ້ນຕໍແລະມູນຄ່ານ້ໍາ, ສໍາລັບການປ້ອນຂໍ້ມູນ 2 (ການຈົດທະບຽນນັບຈໍານວນຂອງລ້ານຂອງຜົນໄດ້ຮັບທັງຫມົດ) - ຄໍາຕ່ໍາ. | ||
| 4013 | WG1_H | 0… 999999 | ລອຍ | ຜົນໄດ້ຮັບທີ່ໄດ້ຮັບໂດຍຜ່ານການປະຕິບັດການແບ່ງສ່ວນຂອງຕົວນັບຕົ້ນຕໍແລະມູນຄ່ານ້ໍາຫນັກ, ສໍາລັບການປ້ອນຂໍ້ມູນ 1 (ການລົງທະບຽນນັບຈໍານວນລ້ານຂອງຜົນໄດ້ຮັບທັງຫມົດ) - ຄໍາທີ່ສູງກວ່າ. |
| 4014 | WG1_L | ຜົນໄດ້ຮັບໂດຍຜ່ານການເຮັດໃຫ້ການປະຕິບັດການແບ່ງຂອງຕົວນັບຕົ້ນຕໍແລະມູນຄ່ານ້ໍາ, ສໍາລັບການປ້ອນຂໍ້ມູນ 1 (ການຈົດທະບຽນນັບຈໍານວນຂອງລ້ານຂອງຜົນໄດ້ຮັບທັງຫມົດ) - ຄໍາຕ່ໍາ. | ||
| 4015 | WP1_H | 0… 999999 | ລອຍ | ຜົນໄດ້ຮັບທີ່ໄດ້ຮັບໂດຍຜ່ານການປະຕິບັດການແບ່ງສ່ວນຂອງຕົວນັບຕົ້ນຕໍແລະມູນຄ່ານ້ໍາຫນັກ, ສໍາລັບການປ້ອນຂໍ້ມູນ 1 (ການລົງທະບຽນນັບຈໍານວນລ້ານຂອງຜົນໄດ້ຮັບທັງຫມົດ) - ຄໍາທີ່ສູງກວ່າ. |
| 4016 | WP1_L | ຜົນໄດ້ຮັບໂດຍຜ່ານການເຮັດໃຫ້ການປະຕິບັດການແບ່ງຂອງຕົວນັບຕົ້ນຕໍແລະມູນຄ່ານ້ໍາ, ສໍາລັບການປ້ອນຂໍ້ມູນ 1 (ການຈົດທະບຽນນັບຈໍານວນຂອງລ້ານຂອງຜົນໄດ້ຮັບທັງຫມົດ) - ຄໍາຕ່ໍາ. | ||
| 4017 | WG2_H | 0… 999999 | ລອຍ | ຜົນໄດ້ຮັບທີ່ໄດ້ຮັບໂດຍຜ່ານການປະຕິບັດການແບ່ງສ່ວນຂອງຕົວນັບຕົ້ນຕໍແລະມູນຄ່ານ້ໍາຫນັກ, ສໍາລັບການປ້ອນຂໍ້ມູນ 2 (ການລົງທະບຽນນັບຈໍານວນລ້ານຂອງຜົນໄດ້ຮັບທັງຫມົດ) - ຄໍາທີ່ສູງກວ່າ. |
| 4018 | WG2_L | ຜົນໄດ້ຮັບໂດຍຜ່ານການເຮັດໃຫ້ການປະຕິບັດການແບ່ງຂອງຕົວນັບຕົ້ນຕໍແລະມູນຄ່ານ້ໍາ, ສໍາລັບການປ້ອນຂໍ້ມູນ 2 (ການຈົດທະບຽນນັບຈໍານວນຂອງລ້ານຂອງຜົນໄດ້ຮັບທັງຫມົດ) - ຄໍາຕ່ໍາ. | ||
| 4019 | WP2_H | 0… 999999 | ລອຍ | ຜົນໄດ້ຮັບທີ່ໄດ້ຮັບໂດຍຜ່ານການປະຕິບັດການແບ່ງສ່ວນຂອງຕົວນັບຕົ້ນຕໍແລະມູນຄ່ານ້ໍາຫນັກ, ສໍາລັບການປ້ອນຂໍ້ມູນ 2 (ການລົງທະບຽນນັບຈໍານວນລ້ານຂອງຜົນໄດ້ຮັບທັງຫມົດ) - ຄໍາທີ່ສູງກວ່າ. |
| 4020 | WP2_L | ຜົນໄດ້ຮັບໂດຍຜ່ານການເຮັດໃຫ້ການປະຕິບັດການແບ່ງຂອງຕົວນັບຕົ້ນຕໍແລະມູນຄ່ານ້ໍາ, ສໍາລັບການປ້ອນຂໍ້ມູນ 2 (ການຈົດທະບຽນນັບຈໍານວນຂອງລ້ານຂອງຜົນໄດ້ຮັບທັງຫມົດ) - ຄໍາຕ່ໍາ. |
| 4021 | LG1_H | 0… (2 32 – 1) | ຍາວ | ຄ່າຂອງຕົວນັບແຮງກະຕຸ້ນຫຼັກສຳລັບການປ້ອນຂໍ້ມູນ 1 (ຄຳທີ່ສູງກວ່າ) |
| 4022 | LG1_L | ຄ່າຂອງຕົວນັບແຮງກະຕຸ້ນຫຼັກສຳລັບການປ້ອນຂໍ້ມູນ 1 (ຄຳຕ່ຳກວ່າ) | ||
| 4023 | LP1_H | 0… (2 32 – 1) | ຍາວ | ຄ່າຂອງຕົວນັບແຮງກະຕຸ້ນຫຼັກສຳລັບການປ້ອນຂໍ້ມູນ 1 (ຄຳທີ່ສູງກວ່າ) |
| 4024 | LP1_L | ຄ່າຂອງຕົວນັບແຮງກະຕຸ້ນຫຼັກສຳລັບການປ້ອນຂໍ້ມູນ 1 (ຄຳຕ່ຳກວ່າ) | ||
| 4025 | LG2_H | 0… (2 32 – 1) | ຍາວ | ຄ່າຂອງຕົວນັບແຮງກະຕຸ້ນຫຼັກສຳລັບການປ້ອນຂໍ້ມູນ 2 (ຄຳທີ່ສູງກວ່າ) |
| 4026 | LG2_L | ຄ່າຂອງຕົວນັບແຮງກະຕຸ້ນຫຼັກສຳລັບການປ້ອນຂໍ້ມູນ 2 (ຄຳຕ່ຳກວ່າ) | ||
| 4027 | LP2_H | 0… (2 32 – 1) | ຍາວ | ຄ່າຂອງຕົວນັບແຮງກະຕຸ້ນຊ່ວຍສຳລັບການປ້ອນຂໍ້ມູນ 2 (ຄຳທີ່ສູງກວ່າ) |
| 4028 | LP2_L | ຄ່າຂອງຕົວນັບແຮງກະຕຸ້ນຊ່ວຍສຳລັບການປ້ອນຂໍ້ມູນ 2 (ຄຳຕ່ຳກວ່າ) | ||
| 4029 | ສະຖານະ3 | – | int | ສະຖານະການຜິດພາດຂອງອຸປະກອນ |
| 4030 | ຣີເຊັດ | 0… (2 16 – 1) | int | ຕົວຊີ້ບອກຈໍານວນຂອງການເສື່ອມສະພາບຂອງອຸປະກອນ |
ຊຸດລົງທະບຽນເພື່ອອ່ານໂມດູນ SM3 (ທີ່ຢູ່ 75xx)
| ຊື່ | ຊ່ວງ | ປະເພດການລົງທະບຽນ | ຊື່ປະລິມານ | |
| ມູນຄ່າທີ່ຂ້ອຍລົງທະບຽນ | ||||
| 7500 | ຕົວລະບຸ | – | ລອຍ | ການລະບຸອຸປະກອນຄົງທີ່ (0x8B) |
| 7501 | ສະຖານະພາບ 1 | – | ລອຍ | ສະຖານະການ 1 ແມ່ນການຈົດທະບຽນອະທິບາຍສະຖານະການປ້ອນຂໍ້ມູນຕາມເຫດຜົນໃນປັດຈຸບັນ |
| 7502 | ສະຖານະພາບ 2 | – | ລອຍ | ສະຖານະ 2 ແມ່ນການລົງທະບຽນທີ່ອະທິບາຍເຖິງຕົວກໍານົດການສົ່ງສັນຍານໃນປະຈຸບັນ |
| 7503 | W1 | 0… 1 | ລອຍ | ຄ່າຂອງສະຖານະທີ່ອ່ານອອກຂອງວັດສະດຸປ້ອນ 1 |
| 7504 | W2 | 0… 1 | ລອຍ | ຄ່າຂອງສະຖານະທີ່ອ່ານອອກຂອງວັດສະດຸປ້ອນ 2 |
| 7505 | WG1 | 0… (2 16 – 1) | ລອຍ | ຜົນໄດ້ຮັບໂດຍຜ່ານການເຮັດໃຫ້ການປະຕິບັດການແບ່ງຂອງຕົວຕ້ານການຕົ້ນຕໍແລະມູນຄ່ານ້ໍາຫນັກ, ສໍາລັບການປ້ອນຂໍ້ມູນ 1 |
| 7506 | WP1 | – | ລອຍ | ຜົນໄດ້ຮັບໂດຍຜ່ານການເຮັດໃຫ້ການປະຕິບັດການແບ່ງຂອງຕົວຕ້ານການຊ່ວຍເຫຼືອແລະມູນຄ່ານ້ໍາຫນັກ, ສໍາລັບການປ້ອນຂໍ້ມູນ 1 |
| 7507 | WG2 | – | ລອຍ | ຜົນໄດ້ຮັບໂດຍຜ່ານການເຮັດໃຫ້ການປະຕິບັດການແບ່ງຂອງຕົວຕ້ານການຕົ້ນຕໍແລະມູນຄ່ານ້ໍາຫນັກ, ສໍາລັບການປ້ອນຂໍ້ມູນ 2 |
| 7508 | WP2 | – | ລອຍ | ຜົນໄດ້ຮັບໂດຍຜ່ານການເຮັດໃຫ້ການປະຕິບັດການແບ່ງຂອງຕົວຕ້ານການຊ່ວຍເຫຼືອແລະມູນຄ່ານ້ໍາຫນັກ, ສໍາລັບການປ້ອນຂໍ້ມູນ 2 |
| 7509 | LG1 | 0… (2 32 – 1) | ລອຍ | ຄ່າຂອງຕົວນັບແຮງກະຕຸ້ນຫຼັກສຳລັບການປ້ອນຂໍ້ມູນ 1 |
| 7510 | LP1 | 0… (2 32 – 1) | ລອຍ | ຄ່າຂອງຕົວນັບການກະຕຸ້ນແຮງດັນສໍາລັບການປ້ອນຂໍ້ມູນ 1 |
| 7511 | LP2 | 0… (2 32 – 1) | ລອຍ | ຄ່າຂອງຕົວນັບແຮງກະຕຸ້ນຫຼັກສຳລັບການປ້ອນຂໍ້ມູນ 2 |
| 7512 | LP2 | 0… (2 32 – 1) | ລອຍ | ຄ່າຂອງຕົວນັບການກະຕຸ້ນແຮງດັນສໍາລັບການປ້ອນຂໍ້ມູນ 2 |
| 7513 | ສະຖານະ3 | ລອຍ | ສະຖານະຂອງອຸປະກອນຜິດພາດ | |
| 7514 | ຣີເຊັດ | 0… (2 16 – 1) | ລອຍ | ຕົວຊີ້ບອກຈໍານວນຂອງການເສື່ອມສະພາບຂອງອຸປະກອນ |
ລາຍລະອຽດຂອງການຈົດທະບຽນສະຖານະພາບ 1
 Bit-15…2 ບໍ່ໄດ້ໃຊ້ລັດ 0
Bit-15…2 ບໍ່ໄດ້ໃຊ້ລັດ 0
ສະຖານະ Bit-1 ຂອງການປ້ອນຂໍ້ມູນ IN2
0 - ສະຖານະເປີດຫຼືບໍ່ເຄື່ອນໄຫວ,
1 - ລັດວົງຈອນສັ້ນ ຫຼືການເຄື່ອນໄຫວ
ສະຖານະ Bit-0 ຂອງການປ້ອນຂໍ້ມູນ IN1
0 - ສະຖານະເປີດຫຼືບໍ່ເຄື່ອນໄຫວ,
1 - ລັດວົງຈອນສັ້ນ ຫຼືການເຄື່ອນໄຫວ
ລາຍລະອຽດຂອງການຈົດທະບຽນສະຖານະພາບ 2 Bit-15…6 ບໍ່ໄດ້ໃຊ້ລັດ 0
Bit-15…6 ບໍ່ໄດ້ໃຊ້ລັດ 0
Bit-5…3 ຮູບແບບການເຮັດວຽກ ແລະໜ່ວຍຂໍ້ມູນ
000 – ປິດການໂຕ້ຕອບ
001 – 8N1 – ASCII
010 – 7E1 – ASCII
011 – 7O1 – ASCII
100 – 8N2 – RTU
101 – 8E1 – RTU
110 – 8O1 – RTU
111 – 8N1 – RTU
Bit-2…0 ອັດຕາ Baud
000 – 2400 bit/s
001 – 4800 bit/s
010 – 9600 bit/s
011 – 19200 bit/s
100 – 38400 bit/s
ລາຍລະອຽດຂອງການຈົດທະບຽນສະຖານະພາບ 3 Bit-1…0 FRAM ຄວາມຜິດພາດຫນ່ວຍຄວາມຈໍາ – ຕົວນັບຕົ້ນຕໍ 1
Bit-1…0 FRAM ຄວາມຜິດພາດຫນ່ວຍຄວາມຈໍາ – ຕົວນັບຕົ້ນຕໍ 1
00 - ຂາດຄວາມຜິດພາດ
01 - ຄວາມຜິດພາດຂອງການຂຽນ / readout ຈາກຊ່ອງຄວາມຊົງຈໍາ 1
10 - ຄວາມຜິດພາດຂອງການຂຽນ / readout ຈາກຊ່ອງຄວາມຈໍາ 1 ແລະ 2
11 - ຄວາມຜິດພາດຂອງການຂຽນ / readout ຂອງ blocs ຄວາມຈໍາທັງຫມົດ (ການສູນເສຍຂອງມູນຄ່າ counter)
Bit-5…4 FRAM ຄວາມຜິດພາດຫນ່ວຍຄວາມຈໍາ – ຕົວນັບຮອງ 1
00 - ຂາດຄວາມຜິດພາດ
01 - ຄວາມຜິດພາດຂອງການຂຽນ / readout ຈາກຊ່ອງຄວາມຈໍາທີ 1
10 - ຄວາມຜິດພາດຂອງການຂຽນ / readout ຈາກຊ່ອງຄວາມຊົງຈໍາທີ 1 ແລະທີ 2
11 - ຄວາມຜິດພາດຂອງການຂຽນ / readout ຂອງ blocs ຄວາມຈໍາທັງຫມົດ (ການສູນເສຍຂອງມູນຄ່າ counter)
Bit-9…8 FRAM ຄວາມຜິດພາດຫນ່ວຍຄວາມຈໍາ – ຕົວນັບຕົ້ນຕໍ 2
00 - ຂາດຄວາມຜິດພາດ
01 - ຄວາມຜິດພາດຂອງການຂຽນ / readout ຈາກຊ່ອງຄວາມຈໍາທີ 1
10 - ຄວາມຜິດພາດຂອງການຂຽນ / readout ຈາກຊ່ອງຄວາມຊົງຈໍາຄັ້ງທີ 1 ແລະ 2 ແລະ 1 ແລະ 2
11 - ຄວາມຜິດພາດຂອງການຂຽນ / readout ຂອງ blocs ຄວາມຈໍາທັງຫມົດ (ການສູນເສຍຂອງມູນຄ່າ counter)
Bit-13…12 FRAM ຄວາມຜິດພາດຫນ່ວຍຄວາມຈໍາ – ຕົວນັບຮອງ 2
00 - ຂາດຄວາມຜິດພາດ
01 - ຄວາມຜິດພາດຂອງການຂຽນ / readout ຈາກຊ່ອງຄວາມຈໍາທີ 1
10 - ຄວາມຜິດພາດຂອງການຂຽນ / readout ຈາກຊ່ອງຄວາມຈໍາທີ 1 ແລະທີ 2
11 - ຄວາມຜິດພາດຂອງການຂຽນ / readout ຂອງ blocs ຄວາມຈໍາທັງຫມົດ (ການສູນເສຍຂອງມູນຄ່າ counter)
Bit-15…6, 3…2, 7…6, 11…10, 15…14 ບໍ່ມີລັດທີ່ໃຊ້ແລ້ວ 0
ຊຸດການລົງທະບຽນເພື່ອອ່ານ ແລະຂຽນໂມດູນ SM3 (ທີ່ຢູ່ 76xx)
ຕາຕະລາງ 6
| ມູນຄ່າຂອງປະເພດ float ແມ່ນຖືກຈັດໃສ່ໃນທະບຽນ 32-bit. | ຄ່າຂອງປະເພດ int ແມ່ນຖືກຈັດໃສ່ໃນທະບຽນ 16-bit. | ຊ່ວງ | ຊື່ | ຊື່ປະລິມານ |
| 7600 | 4200 | – | ຕົວລະບຸ | ຕົວລະບຸ (0x8B) |
| 7601 | 4201 | 0… 4 | ອັດຕາ Baud | ອັດຕາ Baud ຂອງການໂຕ້ຕອບ RS 0 – 2400 b/s 1 – 4800 b/s 2 – 9600 b/s 3 – 19200 b/s 4 – 38400 b/s |
| 7602 | 4202 | 0… 7 | ໂໝດ | ຮູບແບບການເຮັດວຽກຂອງອິນເຕີເຟດ RS 0 – ການໂຕ້ຕອບຖືກປິດ 1 – ASCII 8N1 2 – ASCII 7E1 3 – ASCII 7O1 4 – RTU 8N2 5 – RTU 8E1 ? 6 – RTU 8O1 7 – RTU 8N1 |
| 7603 | 4203 | 0… 247 | ທີ່ຢູ່ | ທີ່ຢູ່ອຸປະກອນຢູ່ໃນລົດເມ Modbus |
| 7604 | 4204 | 0… 1 | ສະໝັກ | ການຍອມຮັບການປ່ຽນແປງສໍາລັບການລົງທະບຽນ 7601-7603 0 - ຂາດການຍອມຮັບ 1 - ການຍອມຮັບການປ່ຽນແປງ |
| 7605 | 4205 | 0… 1 | ຮູບແບບການເຮັດວຽກ | ຮູບແບບການເຮັດວຽກຂອງອຸປະກອນ: 0 – ການປ້ອນຂໍ້ມູນຕາມເຫດຜົນ 1 - ການປ້ອນຂໍ້ມູນຕ້ານ |
| 7606 | 4206 | 0… 11 | ຄໍາແນະນໍາ | ການລົງທະບຽນຄໍາແນະນໍາ: 1 - ການລົບຕົວນັບການຊ່ວຍເຫຼືອສໍາລັບການປ້ອນຂໍ້ມູນ 1 2 - ການລົບຕົວນັບການຊ່ວຍເຫຼືອສໍາລັບການປ້ອນຂໍ້ມູນ 2 3 - ການລົບຕົວນັບຕົ້ນຕໍສໍາລັບການປ້ອນຂໍ້ມູນ 1 (ພຽງແຕ່ມີ RS-232) 4 - ການລົບຕົວນັບຕົ້ນຕໍສໍາລັບການປ້ອນຂໍ້ມູນ 2 (ພຽງແຕ່ມີ RS-232) 5 - ການລົບລ້າງຕົວນັບການຊ່ວຍເຫຼືອ 6 - ການລົບຕົວນັບຕົ້ນຕໍ (ພຽງແຕ່ມີ RS232) 7 - ຂຽນຂໍ້ມູນໃນຕອນຕົ້ນກັບການຈົດທະບຽນ 7605 – 7613 ແລະ 4205 – 4211 (ສະເພາະກັບ RS232) 8 – ຂຽນຂໍ້ມູນເລີ່ມຕົ້ນໃສ່ທະບຽນ 7601 – 7613 ແລະ 4201 – 4211 (ສະເພາະກັບ RS232) 9 – ຣີເຊັດອຸປະກອນ 10 - ການລົບບັນຊີສະຖານະພາບຄວາມຜິດພາດ 11 - ການລົບການຈົດທະບຽນຈໍານວນໃຫມ່ |
| 7607 | 4207 | 0… 3 | ສະຖານະທີ່ເຄື່ອນໄຫວ | ສະຖານະທີ່ໃຊ້ໄດ້ສຳລັບການປ້ອນຂໍ້ມູນອຸປະກອນ: 0x00 – ສະຖານະ “0” ສໍາລັບ IN1, ສະຖານະ “0” ສໍາລັບ IN2 0x01 – ສະຖານະ “1” ສໍາລັບ IN1, ສະຖານະ “0” ສໍາລັບ IN2 0x02 – ສະຖານະ “0” ສໍາລັບ IN1, ສະຖານະ “1” ສໍາລັບ IN2 0x03 – ສະຖານະ “1” ສໍາລັບ IN1, ສະຖານະ “1” ສໍາລັບ IN2 |
| 7608 | 4208 | 1…10000 | ເວລາສໍາລັບລະດັບການເຄື່ອນໄຫວ 1 | ໄລຍະເວລາຂອງລະດັບສູງສໍາລັບ 1 impulse ສໍາລັບການປ້ອນຂໍ້ມູນ 1 – (0.5 – 500 ມລ) |
| 7609 | 4209 | 1…100000 | ເວລາສໍາລັບລະດັບ inactive 1 | ໄລຍະເວລາຂອງລະດັບຕ່ໍາສໍາລັບ 1 impulse ສໍາລັບການປ້ອນຂໍ້ມູນ 1 – (0.5 – 500 ມລ) |
| 7610 | 4210 | 1…10000 | ເວລາສໍາລັບລະດັບການເຄື່ອນໄຫວ 2 | ໄລຍະເວລາຂອງລະດັບສູງສໍາລັບ 1 impulse ສໍາລັບການປ້ອນຂໍ້ມູນ 2 – (0.5 – 500 ມລ) |
| 7611 | 4211 | 1…10000 | ເວລາສໍາລັບລະດັບ inactive 2 | ໄລຍະເວລາຂອງລະດັບຕ່ໍາສໍາລັບ 1 impulse ສໍາລັບການປ້ອນຂໍ້ມູນ 2 – (0.5 – 500 ມລ) |
| 7612 | 0.005…1000000 | ນ້ຳໜັກ 1 | ຄ່າຂອງນ້ຳໜັກສຳລັບການປ້ອນຂໍ້ມູນ 1 | |
| 7613 | 0.005…1000000 | ນ້ຳໜັກ 2 | ຄ່າຂອງນ້ຳໜັກສຳລັບການປ້ອນຂໍ້ມູນ 2 | |
| 7614 | 4212 | – | ລະຫັດ | ລະຫັດກະຕຸ້ນການປ່ຽນແປງໃນທະບຽນ 7605 – 7613 (4206 – 4211), ລະຫັດ – 112 |
Counters ImpulSE
ແຕ່ລະ input impulse converter ມີສອງຕົວນັບ 32-bit ເອກະລາດ – ເຄື່ອງນັບແຮງດັນຕົ້ນຕໍ ແລະ auxiliary. ສະຖານະສູງສຸດຂອງຕົວນັບແມ່ນ 4.294.967.295 (2?? – 1) impulses.
ການເພີ່ມຂຶ້ນຂອງຕົວນັບໂດຍຫນຶ່ງປະຕິບັດຕາມພ້ອມໆກັນໃນເວລາທີ່ກວດພົບສະຖານະການເຄື່ອນໄຫວຂອງໄລຍະເວລາທີ່ເຫມາະສົມສໍາລັບການປ້ອນຂໍ້ມູນ impulse ແລະລັດທີ່ກົງກັນຂ້າມກັບສະຖານະການເຄື່ອນໄຫວຂອງໄລຍະເວລາທີ່ເຫມາະສົມ.
6.1. ເຄົາເຕີຫຼັກ
ຕົວຕ້ານການຕົ້ນຕໍສາມາດອ່ານອອກໄດ້ໂດຍການເຊື່ອມຕໍ່ການຂຽນໂປລແກລມ RJ ຫຼືການໂຕ້ຕອບ RS485, ແຕ່ຖືກລຶບລ້າງໂດຍການເຊື່ອມໂຍງການຂຽນໂປລແກລມເທົ່ານັ້ນໂດຍຜ່ານການຂຽນມູນຄ່າທີ່ເຫມາະສົມກັບທະບຽນຄໍາແນະນໍາ (ເບິ່ງຕາຕະລາງ 6). ໃນລະຫວ່າງການອ່ານ, ເນື້ອໃນຂອງຄໍາທີ່ອາຍຸແລະອ່ອນຂອງການຈົດທະບຽນເຄົາເຕີແມ່ນໄດ້ຖືກເກັບຮັກສາໄວ້ແລະບໍ່ມີການປ່ຽນແປງເຖິງຕອນທ້າຍຂອງການແລກປ່ຽນກອບຂໍ້ມູນ. ກົນໄກນີ້ຮັບປະກັນການອ່ານທີ່ປອດໄພທັງການລົງທະບຽນ 32-bit ທັງຫມົດແລະສ່ວນ 16-bit ຂອງມັນ.
ການປະກົດຕົວຂອງການ overflow counter ຕົ້ນຕໍບໍ່ໄດ້ເຮັດໃຫ້ເກີດການຢຸດເຊົາການນັບ impulse ໄດ້.
ສະຖານະຕົວນັບຖືກຂຽນໄວ້ໃນໜ່ວຍຄວາມຈຳທີ່ບໍ່ປ່ຽນແປງ.
checksum CRC, ຄິດໄລ່ຈາກເນື້ອໃນ counters, ຍັງຂຽນ.
ຫຼັງຈາກສະຫຼັບການສະຫນອງ, ຕົວແປງສັນຍານ reproduces counter state ຈາກຂໍ້ມູນລາຍລັກອັກສອນແລະກວດເບິ່ງຜົນລວມ CRC. ໃນກໍລະນີຂອງຄວາມບໍ່ສອດຄ່ອງໃນການລົງທະບຽນຄວາມຜິດພາດ, ເຄື່ອງຫມາຍຄວາມຜິດພາດທີ່ເຫມາະສົມແມ່ນຖືກກໍານົດ (ເບິ່ງລາຍລະອຽດສະຖານະພາບ 3).
ການລົງທະບຽນຂອງເຄົາເຕີຫຼັກແມ່ນຕັ້ງຢູ່ພາຍໃຕ້ທີ່ຢູ່ 4021 -4022 ສໍາລັບການປ້ອນຂໍ້ມູນ 1 ແລະ 4025 – 4026 ສໍາລັບການປ້ອນຂໍ້ມູນ 2.
6.2. ເຄົາເຕີຊ່ວຍ
counter auxiliary ປະຕິບັດບົດບາດຂອງ counter ຂອງຜູ້ໃຊ້, ເຊິ່ງສາມາດຖືກລຶບລ້າງໄດ້ທຸກເວລາ, ທັງໂດຍການເຊື່ອມຕໍ່ການຂຽນໂປລແກລມ RJ ແລະຈາກລະດັບຄໍາຮ້ອງສະຫມັກໂດຍການໂຕ້ຕອບ RS-485.
ນີ້ແມ່ນປະຕິບັດໂດຍການຂຽນມູນຄ່າທີ່ເຫມາະສົມກັບທະບຽນຄໍາແນະນໍາ (ເບິ່ງຕາຕະລາງ 6).
ກົນໄກການອ່ານແມ່ນຄ້າຍຄືກັນກັບທີ່ອະທິບາຍ, ໃນກໍລະນີຂອງຕົວຕ້ານການຕົ້ນຕໍ.
ໂຕນັບການຊ່ວຍຖືກຕັ້ງຄືນໃໝ່ໂດຍອັດຕະໂນມັດຫຼັງຈາກການລົ້ນຂອງມັນ.
ການລົງທະບຽນຕົວນັບເສີມແມ່ນຕັ້ງຢູ່ພາຍໃຕ້ທີ່ຢູ່ 4023 – 4024 ສໍາລັບການປ້ອນຂໍ້ມູນ 1 ແລະ 4027 – 4028 ສໍາລັບການປ້ອນຂໍ້ມູນ 2.
ການຕັ້ງຄ່າ IMPULSE INPUTS
ການຕັ້ງຄ່າຕົວກໍານົດການອຸປະກອນຢູ່ໃນທະບຽນ 7606 – 7613 (4206 – 4211) ແມ່ນເປັນໄປໄດ້ຫຼັງຈາກການຂຽນຄ່າ 112 ທີ່ຜ່ານມາກັບທະບຽນ 7614 (4212).
ການຂຽນຂອງຄ່າ 1 ກັບທະບຽນ 7605 (4205) ເຮັດໃຫ້ເກີດການກະຕຸ້ນຂອງວັດສະດຸປ້ອນ impulse ແລະຟັງຊັນການຕັ້ງຄ່າທັງຫມົດທີ່ກ່ຽວຂ້ອງກັບໂຫມດການເຮັດວຽກທີ່ມີການເຄື່ອນໄຫວ. ສໍາລັບແຕ່ລະ impulse input ມັນເປັນໄປໄດ້ທີ່ຈະດໍາເນີນໂຄງການຕົວກໍານົດການດັ່ງຕໍ່ໄປນີ້: voltage ລະດັບການປ້ອນຂໍ້ມູນສໍາລັບສະຖານະການເຄື່ອນໄຫວແລະໄລຍະເວລາຫນ້ອຍທີ່ສຸດຂອງລັດນີ້ແລະລັດທີ່ກົງກັນຂ້າມກັບສະຖານະການເຄື່ອນໄຫວ. ນອກຈາກນັ້ນ, ມັນເປັນໄປໄດ້ທີ່ຈະກໍານົດຄ່າຂອງນ້ໍາຫນັກ impulse ໃຫ້ກັບແຕ່ລະວັດສະດຸປ້ອນ.
7.1 ສະຖານະທີ່ເຄື່ອນໄຫວ
ການຕັ້ງຄ່າທີ່ເປັນໄປໄດ້ຂອງສະຖານະການເຄື່ອນໄຫວແມ່ນ shorting (ລັດສູງໃນການປ້ອນຂໍ້ມູນ) ຫຼື input ເປີດ (ລັດຕ່ໍາໃນການປ້ອນຂໍ້ມູນ). ການຕັ້ງຄ່າສໍາລັບທັງສອງວັດສະດຸປ້ອນແມ່ນຢູ່ໃນທະບຽນຂອງ 7607, 4007 ທີ່ຢູ່ ແລະມູນຄ່າຂອງມັນມີຄວາມຫມາຍດັ່ງຕໍ່ໄປນີ້:
ສະຖານະທີ່ເຄື່ອນໄຫວຂອງວັດສະດຸປ້ອນ
ຕາຕະລາງ 7.
| ລົງທະບຽນ ຄ່າ | ສະຖານະທີ່ໃຊ້ໄດ້ສໍາລັບການປ້ອນຂໍ້ມູນ 2 | ສະຖານະທີ່ໃຊ້ໄດ້ສໍາລັບການປ້ອນຂໍ້ມູນ 1 |
| 0 | ລັດຕໍ່າ | ລັດຕໍ່າ |
| 1 | ລັດຕໍ່າ | ລັດສູງ |
| 2 | ລັດສູງ | ລັດຕໍ່າ |
| 3 | ລັດສູງ | ລັດສູງ |
ສະຖານະຂອງ impulse inputs, ພິຈາລະນາການຕັ້ງຄ່າໂດຍວິທີການລົງທະບຽນ 7607 (4007), ແມ່ນສາມາດເຂົ້າເຖິງໄດ້ໃນສະຖານະພາບຂອງຕົວແປງສັນຍານຫຼືໃນທະບຽນ 7503, 7504 ຫຼື 4003, 4004.
7.2. ໄລຍະເວລາຂອງລັດທີ່ເຄື່ອນໄຫວ
ຄໍານິຍາມຂອງໄລຍະເວລາຂອງລັດການເຄື່ອນໄຫວຫນ້ອຍສຸດໃນວັດສະດຸປ້ອນເຮັດໃຫ້ການກັ່ນຕອງຂອງ interference ທີ່ສາມາດປາກົດຢູ່ໃນສາຍສັນຍານແລະການນັບຂອງ impulses ມີພຽງແຕ່ໄລຍະເວລາທີ່ເຫມາະສົມ. ໄລຍະເວລາຕໍາ່ສຸດທີ່ຂອງສະຖານະການເຄື່ອນໄຫວແມ່ນຕັ້ງຢູ່ໃນຂອບເຂດຈາກ 0.5 ຫາ 500 milliseconds ໃນທະບຽນທີ່ມີທີ່ຢູ່ 7608 (ສະຖານະການເຄື່ອນໄຫວ), 7609 (ສະຖານະກົງກັນຂ້າມ) ສໍາລັບການປ້ອນຂໍ້ມູນ 1 ແລະກັບທີ່ຢູ່ 7610 (ສະຖານະການເຄື່ອນໄຫວ), 7611 (ກົງກັນຂ້າມ. ລັດ) ສໍາລັບການປ້ອນຂໍ້ມູນ 2.
ແຮງກະຕຸ້ນທີ່ສັ້ນກວ່າຈາກມູນຄ່າທີ່ກໍານົດໄວ້ໃນທະບຽນຈະບໍ່ຖືກນັບ.
Impulse inputs ແມ່ນ sampນໍາພາໃນໄລຍະ 0.5 millisecond.
7.3. ນ້ຳໜັກປ້ອນເຂົ້າ
ຜູ້ໃຊ້ມີຄວາມເປັນໄປໄດ້ທີ່ຈະກໍານົດມູນຄ່າຂອງນ້ໍາຫນັກ impulse (ລົງທະບຽນ
7612, 7613). ຜົນໄດ້ຮັບແມ່ນຖືກກໍານົດດ້ວຍວິທີດັ່ງຕໍ່ໄປນີ້:
ResultMeasurement_Y = CounterValue_X/WeightValue_X
ResultMeasurement_Y – ຜົນໄດ້ຮັບການວັດແທກສໍາລັບການປ້ອນຂໍ້ມູນທີ່ເຫມາະສົມ ແລະຕົວນັບເລືອກ
CounterValue_X – ຄ່າຕົວນັບຂອງການປ້ອນຂໍ້ມູນທີ່ເຫມາະສົມ ແລະເຄື່ອງນັບທີ່ເລືອກ CounterWeight_X
- ມູນຄ່ານ້ໍາສໍາລັບການປ້ອນຂໍ້ມູນທີ່ເຫມາະສົມ.
ຄ່າທີ່ກໍານົດແມ່ນສາມາດເຂົ້າເຖິງໄດ້ໃນ 16 bit registers ໃນໄລຍະ 4005-4012, ອີງຕາມຕາຕະລາງ 4 ແລະໃນ single registers ຂອງ float type ໃນໄລຍະ 7505 – 7508, ອີງຕາມຕາຕະລາງ 5. ວິທີການກໍານົດຄ່າຂອງຕົ້ນຕໍ. ຜົນໄດ້ຮັບຕ້ານການປ້ອນຂໍ້ມູນ 1 ໂດຍຜ່ານການອ່ານການລົງທະບຽນໃນຂອບເຂດ 4005 – 4012, ແມ່ນນໍາສະເຫນີຂ້າງລຸ່ມນີ້.
ResultMeasurement_1 = 1000000* (ຍາວ)(WMG1_H, WMG1_L) + (float)(WG1_H, WG1_L)
ຜົນການວັດແທກ_1
- ຜົນໄດ້ຮັບການພິຈາລະນານ້ໍາຫນັກສໍາລັບການປ້ອນຂໍ້ມູນ 1 ແລະຕົວນັບຕົ້ນຕໍ.
(ຍາວ)(WMG1_H, WMG1_L) – ຄໍາທີ່ສູງກວ່າຂອງຜົນໄດ້ຮັບ “ResultMeasurement_1”
ຕົວແປຂອງປະເພດ float ປະກອບດ້ວຍສອງທະບຽນ 16-bit: WMG1_H ແລະ WMG1_L.
(float)(WG1_H, WG1_L) – ຄໍາລຸ່ມຂອງຜົນໄດ້ຮັບ, “ResultMeasurement_1”
ຕົວແປຂອງປະເພດ float ປະກອບດ້ວຍສອງທະບຽນ 16-bit: WG1_H ແລະ WG1_L.
ຜົນໄດ້ຮັບທີ່ຍັງເຫຼືອສໍາລັບການປ້ອນຂໍ້ມູນ 2 ແລະຕົວນັບເສີມແມ່ນຖືກກໍານົດຄ້າຍຄືກັນກັບຕົວຢ່າງຂ້າງເທິງampເລ.
7.4. ຕົວກໍານົດການເລີ່ມຕົ້ນ
ອຸປະກອນ, ຫຼັງຈາກເຮັດໃຫ້ຄໍາແນະນໍາ 7 (ເບິ່ງຕາຕະລາງ nr 5), ຖືກຕັ້ງຢູ່ໃນຄ່າເລີ່ມຕົ້ນຂ້າງລຸ່ມນີ້:
- ຮູບແບບການເຮັດວຽກ – 0
- ສະຖານະເປີດໃຊ້ງານ - 3
- ເວລາສໍາລັບລະດັບການເຄື່ອນໄຫວ 1 – 5 ms
- ເວລາສໍາລັບລະດັບ inactive 1 – 5 ms
- ເວລາສໍາລັບລະດັບການເຄື່ອນໄຫວ 2 – 5 ms
- ເວລາສໍາລັບລະດັບ inactive 2 – 5 ms
- ນ້ຳໜັກ 1–1
- ນ້ຳໜັກ 2–1
ຫຼັງຈາກເຮັດໃຫ້ຄໍາແນະນໍາ 8 (ເບິ່ງຕາຕະລາງ nr 5), ອຸປະກອນກໍານົດຄ່າເລີ່ມຕົ້ນເພີ່ມເຕີມດັ່ງຕໍ່ໄປນີ້:
- RS baud rate – 9600 b/s
- ໂໝດ RS – 8N1
- ທີ່ຢູ່ – 1
ຂໍ້ມູນດ້ານວິຊາການ
Logic inputs: ແຫຼ່ງສັນຍານ – ສັນຍານທ່າແຮງ: – ລະດັບ logic: 0 logic: 0… 3 V
1 logic: 3,5… 24 V
ແຫຼ່ງສັນຍານ – ບໍ່ມີສັນຍານທີ່ເປັນໄປໄດ້:
– ລະດັບເຫດຜົນ: 0 ຕາມເຫດຜົນ – ເປີດການປ້ອນຂໍ້ມູນ
1 logic – shorted input
ການຕໍ່ຕ້ານວົງຈອນສັ້ນຂອງການຕິດຕໍ່ໂດຍບໍ່ມີທ່າແຮງ ≤ 10 kΩ
ການເປີດຄວາມຕ້ານທານຂອງການຕິດຕໍ່ໂດຍບໍ່ມີທ່າແຮງ≥ 40 kΩ
ຕົວກໍານົດການຕ້ານ:
– ທີ່ໃຊ້ເວລາ impulse ຕໍາ່ສຸດທີ່ (ສໍາລັບລັດສູງ): 0.5 ms
– ທີ່ໃຊ້ເວລາ impulse ຕໍາ່ສຸດທີ່ (ສໍາລັບລັດຕ່ໍາ): 0.5 ms
- ຄວາມຖີ່ສູງສຸດ: 800 Hz
ຂໍ້ມູນການສົ່ງຜ່ານ:
a) ອິນເຕີເຟດ RS-485: ອະນຸສັນຍາລະບົບສາຍສົ່ງ: MODBUS
ASCII: 8N1, 7E1, 7O1
RTU: 8N2, 8E1, 8O1, 8N1 ອັດຕາ baud
2400, 4800, 9600, 19200, 38400: 57600, 115200 bit/s ທີ່ຢູ່…………. 1…247
b) ການໂຕ້ຕອບ RS-232:
transmission protocol MODBUS RTU 8N1 baud rate 9600 ທີ່ຢູ່ 1
ການບໍລິໂພກພະລັງງານຂອງໂມດູນ≤ 1.5 A
ເງື່ອນໄຂການດໍາເນີນງານການຈັດອັນດັບ:
- ການສະຫນອງ voltage: 20…24…40 V ac/dc ຫຼື ຫຼື 85…230…253 V ac/dc
- ການສະຫນອງ voltage ຄວາມຖີ່- 40…50/60…440 Hz
- ອຸນຫະພູມລ້ອມຮອບ - 0…23…55°C
– ຄວາມຊຸ່ມຊື່ນພີ່ນ້ອງ-< 95% (ຄວາມຂົ້ນທີ່ບໍ່ສາມາດຮັບໄດ້)
– ສະໜາມແມ່ເຫຼັກພາຍນອກ- < 400 A/m
- ຕໍາແຫນ່ງການເຮັດວຽກ - ໃດ
ເງື່ອນໄຂການເກັບຮັກສາ ແລະການຈັດການ:
– ອຸນຫະພູມລ້ອມຮອບ – 20… 70°C
– ຄວາມຊຸ່ມຊື່ນພີ່ນ້ອງ < 95 % (ການຂົ້ນທີ່ບໍ່ສາມາດຮັບໄດ້)
- ການສັ່ນສະເທືອນ sinusoidal ທີ່ຍອມຮັບໄດ້: 10…150 Hz
- ຄວາມຖີ່:
- ການຍ້າຍຖິ່ນຖານ ampເສັ້ນຂະ ໜານ 0.55 ມມ
ເກຣດປ້ອງກັນທີ່ຮັບປະກັນ:
– ຈາກດ້ານໜ້າເຮືອນ: IP 40
- ຈາກດ້ານຂ້າງຂອງສະຖານີ: IP 40
ຂະໜາດລວມ: 22.5 x 120 x 100 ມມ
ນ້ໍາຫນັກ: < 0.25 kg
ທີ່ຢູ່ອາໃສ: ດັດແປງເພື່ອປະກອບໃສ່ທາງລົດໄຟ
ຄວາມເຂົ້າກັນໄດ້ຂອງແມ່ເຫຼັກໄຟຟ້າ:
- ພູມຕ້ານທານສຽງ EN 61000-6-2
- ການປ່ອຍສຽງລົບກວນ EN 61000-6-4
ຄວາມຕ້ອງການຄວາມປອດໄພ acc. ກັບ EN 61010-1:
– ປະເພດການຕິດຕັ້ງ III
- ມົນລະພິດຊັ້ນ 2
ໄລຍະສູງສຸດເຖິງແຜ່ນດິນໂລກ voltage:
- ສໍາລັບວົງຈອນການສະຫນອງ: 300 V
- ສໍາລັບວົງຈອນອື່ນໆ: 50 V
ກ່ອນຄວາມເສຍຫາຍຈະຖືກປະກາດ
| ອາການ | ຂັ້ນຕອນ | ໝາຍເຫດ |
| 1. ໂມດູນ diode ສີຂຽວບໍ່ສະຫວ່າງ. | ກວດເບິ່ງການເຊື່ອມຕໍ່ຂອງສາຍເຄເບີ້ນເຄືອຂ່າຍ. | |
| 2. ໂມດູນບໍ່ໄດ້ສ້າງການສື່ສານກັບອຸປະກອນແມ່ແບບຜ່ານພອດ RS-232. | ກວດເບິ່ງວ່າສາຍໄດ້ຖືກເຊື່ອມຕໍ່ກັບເຕົ້າສຽບທີ່ເຫມາະສົມໃນໂມດູນ. ກວດເບິ່ງວ່າອຸປະກອນຕົ້ນສະບັບຖືກຕັ້ງຢູ່ໃນອັດຕາ baud 9600, ໂຫມດ 8N1, ທີ່ຢູ່ 1. |
(RS-232 ມີຕົວກໍານົດການສົ່ງຕໍ່ຄົງທີ່) |
| ຂາດການສົ່ງສັນຍານການສື່ສານກ່ຽວກັບ RxD ແລະ | ||
| TxD diodes. | ||
| 3. ໂມດູນບໍ່ໄດ້ສ້າງການສື່ສານກັບອຸປະກອນແມ່ແບບຜ່ານພອດ RS-485. ຂາດການສົ່ງສັນຍານການສື່ສານໃນ RxD ແລະ TxD diodes. |
ກວດເບິ່ງວ່າສາຍໄດ້ຖືກເຊື່ອມຕໍ່ກັບເຕົ້າສຽບທີ່ເຫມາະສົມໃນໂມດູນ. ກວດເບິ່ງວ່າອຸປະກອນຕົ້ນສະບັບຖືກຕັ້ງຢູ່ໃນຕົວກໍານົດການສົ່ງສັນຍານດຽວກັນກັບໂມດູນ (ອັດຕາ baud, ຮູບແບບ, ທີ່ຢູ່) ໃນກໍລະນີທີ່ມີຄວາມຈໍາເປັນທີ່ຈະປ່ຽນຕົວກໍານົດການສົ່ງຜ່ານໃນເວລາທີ່ຄົນເຮົາບໍ່ສາມາດສ້າງການສື່ສານຜ່ານ RS-485, ຄົນຫນຶ່ງຕ້ອງໃຊ້ພອດ RS-232 ທີ່ມີຕົວກໍານົດການສົ່ງຕໍ່ຄົງທີ່ (ໃນກໍລະນີທີ່ມີບັນຫາເພີ່ມເຕີມເບິ່ງຈຸດ 2). ຫຼັງຈາກການປ່ຽນແປງພາລາມິເຕີ RS-485 ເຂົ້າໄປໃນຄວາມຕ້ອງການ, ຫນຶ່ງສາມາດປ່ຽນເຂົ້າໄປໃນພອດ RS-885. |
ລະຫັດການສັ່ງຊື້
ຕາຕະລາງ 6 * ເລກລະຫັດແມ່ນສ້າງຕັ້ງຂຶ້ນໂດຍຜູ້ຜະລິດ EXAMPLE ຂອງຄໍາສັ່ງ
* ເລກລະຫັດແມ່ນສ້າງຕັ້ງຂຶ້ນໂດຍຜູ້ຜະລິດ EXAMPLE ຂອງຄໍາສັ່ງ
ໃນເວລາສັ່ງ, ກະລຸນາເຄົາລົບຕົວເລກລະຫັດຕິດຕໍ່ກັນ.
ລະຫັດ: SM3 – 1 00 7 ຫມາຍຄວາມວ່າ:
SM3 – ໂມດູນ 2 ຊ່ອງຂອງວັດສະດຸປ້ອນຖານສອງ,
1 - ການສະຫນອງ voltage : 85…230…253 Va.c./dc
00 - ສະບັບມາດຕະຖານ.
7 - ມີໃບຢັ້ງຢືນການກວດກາຄຸນນະພາບພິເສດ.
![]() LUMEL SA
LUMEL SA
ul. Słubicka 4, 65-127 Zielona Góra, ໂປແລນ
ໂທ: +48 68 45 75 100, ແຟັກ +48 68 45 75 508
www.lumel.com.pl
ສະຫນັບສະຫນູນດ້ານວິຊາການ:
tel: (+48 68) 45 75 143, 45 75 141, 45 75 144, 45 75 140
ອີເມລ: export@lumel.com.pl
ພະແນກການສົ່ງອອກ:
tel: (+48 68) 45 75 130, 45 75 131, 45 75 132
ອີເມລ: export@lumel.com.pl
ການສອບທຽບແລະການຢັ້ງຢືນ:
ອີເມລ: Laboratorium@lumel.com.pl
SM3-09C 29.11.21
60-006-00-00371
ເອກະສານ / ຊັບພະຍາກອນ
 |
LUMEL SM3 2 Channel Module ຂອງ Logic ຫຼື Counter Inputs [pdf] ຄູ່ມືຜູ້ໃຊ້ SM3 2 Channel Module ຂອງ Logic ຫຼື Counter Inputs, SM3, 2 Channel Module ຂອງ Logic ຫຼື Counter Inputs, Logic ຫຼື Counter Inputs |



