![]() โมดูล 2 ช่อง
โมดูล 2 ช่อง
ของอินพุตลอจิกหรือตัวนับ
เอสเอ็ม3
![]()
แอปพลิเคชัน
โมดูลอินพุตลอจิก
โมดูล SM3 ของอินพุตลอจิกสองตัวถูกกำหนดให้รวบรวมสถานะลอจิกของอินพุตลอจิก และทำให้เข้าถึงได้ในระบบอุตสาหกรรมที่ใช้คอมพิวเตอร์ซึ่งทำงานบนฐานของอินเทอร์เฟซ RS-485
โมดูลมีอินพุตลอจิก 2 ตัวและอินเทอร์เฟซ RS-485 พร้อมโปรโตคอลการส่ง MODBUS RTU และ ASCII
พอร์ต RS-485 และ RS-232 ถูกแยกทางไฟฟ้าจากสัญญาณอินพุตและแหล่งจ่าย
สามารถตั้งโปรแกรมโมดูลได้โดยใช้พอร์ต RS-485 หรือ RS-232
ในชุดโมดูล SM3 มีสายเชื่อมต่อสำหรับเชื่อมต่อกับคอมพิวเตอร์พีซี (RS-232)
พารามิเตอร์โมดูล:
- สองอินพุตลอจิก
– อินเตอร์เฟสการสื่อสาร RS-485 พร้อมโปรโตคอลการส่งสัญญาณ MODBUS RTU และ ASCII เพื่อทำงานในระบบที่ใช้คอมพิวเตอร์โดยมีการส่งสัญญาณออปติคัลโดยใช้ไดโอด LED
– อัตราบอดที่กำหนดได้: 2400, 4800, 9600, 19299, 38400 บิต/วินาที
โมดูลเป็นตัวแปลงอิมพัลส์
โมดูล SM3 ที่ทำงานเป็นตัวแปลงอิมพัลส์ถูกกำหนดให้เพิ่มอุปกรณ์การวัดที่มีอินพุตอิมพัลส์ เช่น มิเตอร์วัตต์-ชั่วโมง เครื่องวัดความร้อน เครื่องวัดก๊าซ เครื่องวัดอัตราการไหล asl เข้ากับระบบคอมพิวเตอร์
จากนั้น ตัวแปลง SM3 จะเปิดใช้งานการอ่านสถานะตัวนับระยะไกลในระบบบัญชีอัตโนมัติ ตัวแปลงมีอินพุทอิมพัลส์ 2 ตัวและอินเทอร์เฟซ RS-485 พร้อมโปรโตคอลการส่ง MODBUS RTU และ ASCII ซึ่งเปิดใช้งานแอปพลิเคชันในระบบคอมพิวเตอร์ด้วย Wizcon, Fix, In Touch, Genesis 32 (Iconics) และโปรแกรมแสดงภาพอื่นๆ
พารามิเตอร์ตัวแปลง:
- อินพุตอิมพัลส์สองอินพุต กำหนดค่าแยกกัน:
– สถานะแอ็คทีฟของอินพุตที่ตั้งโปรแกรมได้ (ระดับสูงหรือต่ำของอินพุตโวลtagจ)
– ตัวกรองที่ตั้งโปรแกรมได้สำหรับอิมพัลส์อินพุตพร้อมระดับระยะเวลาที่กำหนด (แยกจากกันสำหรับระดับสูงและระดับต่ำ)
– แรงกระตุ้นนับถึงค่า 4.294.967.295 และด้วยการป้องกันการลบจากระดับแอปพลิเคชัน
- ตัวนับแรงกระตุ้นเสริมที่มีความเป็นไปได้ในการลบในเวลาใดก็ได้
– รีจิสเตอร์ที่ไม่ลบเลือนเก็บน้ำหนักของอิมพัลส์ที่นับได้
– 4 รีจิสเตอร์ที่แยกจากกันซึ่งมีผลของการหารค่าตัวนับพร้อมค่าน้ำหนักของอิมพัลส์ที่นับได้ - อินเทอร์เฟซการสื่อสาร RS-485 พร้อมโปรโตคอลการส่งสัญญาณ MODBUS RTU และ ASCII เพื่อทำงานในระบบคอมพิวเตอร์ที่มีการส่งสัญญาณการส่งผ่านแสงบนไดโอด LED
- อัตราบอดที่กำหนดได้: 2400, 4800, 9600, 19200, 134800 บิต/วินาที
- อินเทอร์เฟซการเขียนโปรแกรมบนแผ่นด้านหน้าของประเภท RJ (ระดับ TTL)
- การกำหนดค่าพารามิเตอร์การส่งหลายวิธี:
– ตั้งโปรแกรม – โดยใช้อินเทอร์เฟซการเขียนโปรแกรม RJ บนแผ่นด้านหน้า
– ตั้งโปรแกรม – จากระดับแอปพลิเคชันโดยใช้บัส RS-485 - การจัดเก็บสถานะตัวนับในหน่วยความจำไม่ลบเลือนพร้อมกับการตรวจสอบ CRC
- การนับการลดลงของอุปทาน
- การตรวจจับสถานะฉุกเฉิน
ชุดโมดูล
- โมดูล SM3 ………………………………………. 1 ชิ้น
- คู่มือผู้ใช้ …………………………………….. 1 ชิ้น
- รูเสียบของช่องเสียบ RS-232 …………….. 1 ชิ้น
เมื่อนำโมดูลออกจากกล่อง โปรดตรวจสอบความครบถ้วนในการจัดส่งและดูว่าประเภทและรหัสเวอร์ชันบนแผ่นข้อมูลตรงกับคำสั่งซื้อหรือไม่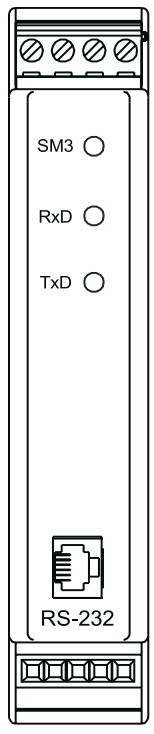 รูปที่ 1 View ของโมดูล SM3
รูปที่ 1 View ของโมดูล SM3
ข้อกำหนดด้านความปลอดภัยขั้นพื้นฐาน ความปลอดภัยในการปฏิบัติงาน
สัญลักษณ์ที่อยู่ในคู่มือซ่อมบำรุงนี้หมายถึง:![]() คำเตือน!
คำเตือน!
คำเตือนถึงสถานการณ์ที่อาจเป็นอันตราย สำคัญอย่างยิ่ง ต้องทำความคุ้นเคยกับสิ่งนี้ก่อนที่จะเชื่อมต่อโมดูล การไม่ปฏิบัติตามคำบอกกล่าวที่ทำเครื่องหมายด้วยสัญลักษณ์เหล่านี้อาจทำให้บุคลากรบาดเจ็บสาหัสและเครื่องมือเสียหายได้![]() คำเตือน!
คำเตือน!
กำหนดบันทึกที่เป็นประโยชน์ทั่วไป หากคุณสังเกต การจัดการโมดูลจะทำได้ง่ายขึ้น เราต้องทราบสิ่งนี้เมื่อโมดูลทำงานไม่สอดคล้องกับความคาดหวัง ผลที่อาจเกิดขึ้นหากละเลย !
ในขอบเขตความปลอดภัย โมดูลเป็นไปตามข้อกำหนดของมาตรฐาน EN 61010 -1
ข้อสังเกตเกี่ยวกับความปลอดภัยของผู้ปฏิบัติงาน:
1. ทั่วไป ![]()
- โมดูล SM3 ถูกกำหนดให้ติดตั้งบนรางขนาด 35 มม.
- การถอดตัวเรือนที่จำเป็นออกโดยไม่ได้รับอนุญาต การใช้งานที่ไม่เหมาะสม การติดตั้งหรือการใช้งานที่ไม่ถูกต้อง ก่อให้เกิดความเสี่ยงต่อการบาดเจ็บของบุคลากรหรือความเสียหายต่ออุปกรณ์ สำหรับข้อมูลโดยละเอียดเพิ่มเติม โปรดศึกษาคู่มือผู้ใช้
- อย่าเชื่อมต่อโมดูลกับเครือข่ายผ่านตัวแปลงอัตโนมัติ
- การดำเนินการทั้งหมดที่เกี่ยวข้องกับการขนส่ง การติดตั้ง และการว่าจ้างตลอดจนการบำรุงรักษาจะต้องดำเนินการโดยบุคลากรที่มีคุณภาพและมีทักษะ และต้องปฏิบัติตามกฎระเบียบระดับชาติสำหรับการป้องกันอุบัติเหตุ
- ตามข้อมูลความปลอดภัยขั้นพื้นฐานนี้ บุคลากรที่มีคุณสมบัติเหมาะสมและมีทักษะคือบุคคลที่คุ้นเคยกับการติดตั้ง การประกอบ การว่าจ้าง และการใช้งานผลิตภัณฑ์ และมีคุณสมบัติที่จำเป็นสำหรับการประกอบอาชีพ
- ซ็อกเก็ต RS-232 ทำหน้าที่เชื่อมต่ออุปกรณ์ (รูปที่ 5) ที่ทำงานร่วมกับโปรโตคอล MODBUS เท่านั้น เสียบปลั๊กลงในซ็อกเก็ตโมดูล RS-232 หากไม่ได้ใช้ซ็อกเก็ต
2. ขนส่ง จัดเก็บ
- โปรดสังเกตหมายเหตุเกี่ยวกับการขนส่ง การจัดเก็บ และการจัดการที่เหมาะสม
- สังเกตสภาพอากาศที่กำหนดในข้อกำหนด
3. การติดตั้ง
- ต้องติดตั้งโมดูลตามระเบียบและคำแนะนำที่ให้ไว้ในคู่มือผู้ใช้นี้
- ตรวจสอบให้แน่ใจว่ามีการจัดการที่เหมาะสมและหลีกเลี่ยงความเครียดเชิงกล
- ห้ามงอส่วนประกอบใด ๆ และห้ามเปลี่ยนระยะห่างของฉนวน
- อย่าสัมผัสชิ้นส่วนอิเล็กทรอนิกส์และหน้าสัมผัสใดๆ
- เครื่องมืออาจมีส่วนประกอบที่ไวต่อไฟฟ้าสถิต ซึ่งอาจเสียหายได้ง่ายจากการจัดการที่ไม่เหมาะสม
- อย่าทำลายหรือทำลายอุปกรณ์ไฟฟ้าใดๆ เพราะอาจเป็นอันตรายต่อสุขภาพของคุณ!
4. การเชื่อมต่อไฟฟ้า
 ก่อนเปิดเครื่องต้องตรวจสอบความถูกต้องของการเชื่อมต่อกับเครือข่าย
ก่อนเปิดเครื่องต้องตรวจสอบความถูกต้องของการเชื่อมต่อกับเครือข่าย- ในกรณีของการเชื่อมต่อเทอร์มินอลป้องกันด้วยสายแยก คุณต้องจำไว้ว่าต้องเชื่อมต่อก่อนการเชื่อมต่ออุปกรณ์กับไฟหลัก
- เมื่อทำงานกับเครื่องดนตรีสด ต้องปฏิบัติตามกฎระเบียบระดับชาติที่ใช้บังคับสำหรับการป้องกันอุบัติเหตุ
- การติดตั้งไฟฟ้าต้องเป็นไปตามข้อบังคับที่เหมาะสม (หน้าตัดของสายเคเบิล ฟิวส์ การต่อสาย PE) สามารถรับข้อมูลเพิ่มเติมได้จากคู่มือผู้ใช้
- เอกสารประกอบด้วยข้อมูลเกี่ยวกับการติดตั้งที่สอดคล้องกับ EMC (การป้องกัน การต่อสายดิน ตัวกรอง และสายเคเบิล) ต้องปฏิบัติตามหมายเหตุเหล่านี้สำหรับผลิตภัณฑ์ที่มีเครื่องหมาย CE ทั้งหมด
- ผู้ผลิตระบบการวัดหรืออุปกรณ์ที่ติดตั้งมีหน้าที่ปฏิบัติตามค่าจำกัดที่กำหนดโดยกฎหมาย EMC
5. การดำเนินการ
- ระบบการวัดรวมถึงโมดูล SM3 ต้องติดตั้งอุปกรณ์ป้องกันตามมาตรฐานและข้อบังคับที่เกี่ยวข้องเพื่อป้องกันอุบัติเหตุ
- หลังจากถอดอุปกรณ์ออกจากแหล่งจ่ายแล้วtage ห้ามสัมผัสส่วนประกอบที่มีกระแสไฟฟ้าและการเชื่อมต่อสายไฟในทันที เนื่องจากสามารถชาร์จตัวเก็บประจุได้
- ต้องปิดตัวเรือนระหว่างการทำงาน
6. การบำรุงรักษาและการบริการ
- โปรดสังเกตเอกสารของผู้ผลิต
- อ่านหมายเหตุเกี่ยวกับความปลอดภัยและการใช้งานเฉพาะผลิตภัณฑ์ทั้งหมดในคู่มือผู้ใช้นี้
- ก่อนถอดตัวเรือนเครื่องมือออก ต้องปิดการจ่ายไฟก่อน
![]() การถอดตัวเรือนตราสารออกในระหว่างระยะเวลาของสัญญารับประกันอาจทำให้เกิดการยกเลิกได้
การถอดตัวเรือนตราสารออกในระหว่างระยะเวลาของสัญญารับประกันอาจทำให้เกิดการยกเลิกได้
การติดตั้ง
4.1. การแก้ไขโมดูล
โมดูลได้รับการออกแบบมาให้ยึดกับรางขนาด 35 มม. (EN 60715) ตัวเรือนโมดูลทำจากพลาสติกที่ดับไฟได้เอง
ขนาดโดยรวมตัวเรือน : 22.5 x 120 x 100 มม. ควรเชื่อมต่อสายไฟภายนอกที่มีหน้าตัด 2.5 มม.² (จากด้านจ่ายไฟ) และ 1.5 มม.² (จากด้านสัญญาณอินพุต) 4.2. คำอธิบายเทอร์มินัล
4.2. คำอธิบายเทอร์มินัล
ต้องเชื่อมต่อแหล่งจ่ายและสัญญาณภายนอกตามรูปที่ 3, 4 และ 5 รายละเอียดต่างๆ ของลีดเอาท์ได้อธิบายไว้ในตารางที่ 1
บันทึก: ต้องให้ความสนใจเป็นพิเศษกับการเชื่อมต่อสัญญาณภายนอกที่ถูกต้อง (ดูตารางที่ 1) มีสามไดโอดบนแผ่นด้านหน้า:
มีสามไดโอดบนแผ่นด้านหน้า:
- สีเขียว – เมื่อให้แสงสว่าง ให้สัญญาณว่าเปิดแหล่งจ่าย
- สีเขียว (RxD) – ส่งสัญญาณการรับข้อมูลโดยโมดูล
- สีเหลือง (TxD) – ส่งสัญญาณการรับส่งข้อมูลโดยโมดูล
คำอธิบายของลีดเอาต์โมดูล SM3
ตารางที่ 1
เทอร์มินัลnr | คำอธิบายเทอร์มินัล |
| 1 | บรรทัด GND ของอินพุตลอจิก |
| 2 | บรรทัด IN1 – อินพุตลอจิกหมายเลข 1 |
| 3 | สาย 5 โวลต์ดีซี |
| 4 | บรรทัด IN2 – อินพุตลอจิกหมายเลข 2 |
| 5 | สาย GND ของอินเตอร์เฟส RS-485 |
| 6, 7 | เส้นที่จัดหาโมดูล |
| 8 | สายของอินเทอร์เฟซ RS-485 พร้อมออปโตไอโซเลชัน |
| 9 | สาย B ของอินเทอร์เฟซ RS-485 พร้อมออปโตไอโซเลชัน |
ตัวอย่างวิธีการเชื่อมต่ออินพุตลอจิกแสดงไว้ด้านล่าง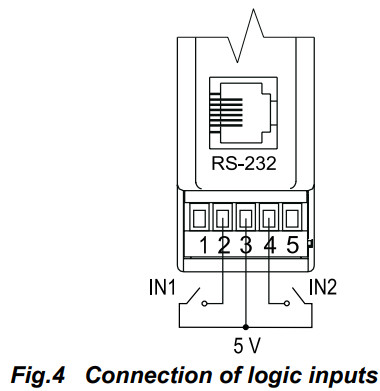
 บันทึก:
บันทึก:
โดยคำนึงถึงการรบกวนทางแม่เหล็กไฟฟ้า เราต้องใช้สายที่มีฉนวนป้องกันเพื่อเชื่อมต่อสัญญาณอินพุตลอจิกและสัญญาณอินเทอร์เฟซ RS-485 ต้องต่อชิลด์เข้ากับเทอร์มินอลป้องกันในจุดเดียว ต้องเชื่อมต่อแหล่งจ่ายไฟด้วยสายเคเบิลสองเส้นที่มีเส้นผ่านศูนย์กลางลวดที่เหมาะสม เพื่อให้มั่นใจว่ามีการป้องกันด้วยคัตเอาต์การติดตั้ง
บริการ
หลังจากเชื่อมต่อสัญญาณภายนอกและเปลี่ยนแหล่งจ่ายแล้ว โมดูล SM3 ก็พร้อมที่จะทำงาน ไดโอดสีเขียวสว่างขึ้นส่งสัญญาณการทำงานของโมดูล ไดโอดสีเขียว (RxD) ส่งสัญญาณการสำรวจโมดูล อย่างไรก็ตาม ไดโอดสีเหลือง (TxD) เป็นคำตอบของโมดูล ไดโอดควรสว่างเป็นวัฏจักรระหว่างการส่งข้อมูล ทั้งผ่านอินเทอร์เฟซ RS-232 และ RS-485 สัญญาณ „+” (ขั้วต่อ 3) คือเอาต์พุต 5 V พร้อมโหลด 50 mA ที่ยอมรับได้ สามารถใช้สำหรับจ่ายวงจรภายนอก
พารามิเตอร์โมดูลทั้งหมดสามารถตั้งโปรแกรมโดยใช้ RS-232 หรือ RS-485 พอร์ต RS-232 มีพารามิเตอร์การส่งข้อมูลคงที่ซึ่งสอดคล้องกับข้อมูลทางเทคนิค ซึ่งช่วยให้สามารถเชื่อมต่อกับโมดูลได้ แม้ว่าจะไม่ทราบพารามิเตอร์ที่ตั้งโปรแกรมไว้ของเอาต์พุตดิจิทัล RS-485 (ที่อยู่ โหมด อัตรา)
มาตรฐาน RS-485 อนุญาตให้เชื่อมต่อโดยตรงกับอุปกรณ์ 32 เครื่องบนลิงค์อนุกรมเดียวที่ยาว 1200 ม. ในการเชื่อมต่ออุปกรณ์จำนวนมากขึ้น จำเป็นต้องใช้อุปกรณ์แยกตัวกลางเพิ่มเติม (เช่น ตัวแปลง/รีพีทเตอร์ PD51) วิธีเชื่อมต่ออินเทอร์เฟซมีอยู่ในคู่มือผู้ใช้โมดูล (รูปที่ 5) ในการรับการส่งสัญญาณที่ถูกต้อง จำเป็นต้องเชื่อมต่อสาย A และ B ขนานกับสายที่เทียบเท่าในอุปกรณ์อื่นๆ ควรทำการเชื่อมต่อด้วยสายที่มีฉนวนหุ้ม ต้องต่อชิลด์เข้ากับเทอร์มินอลป้องกันในจุดเดียว สาย GND ทำหน้าที่ในการป้องกันเพิ่มเติมของสายอินเตอร์เฟซที่การเชื่อมต่อที่ยาวนาน ต้องเชื่อมต่อกับขั้วต่อป้องกัน (ซึ่งไม่จำเป็นสำหรับการทำงานของอินเทอร์เฟซที่ถูกต้อง)
ในการรับการเชื่อมต่อกับคอมพิวเตอร์พีซีผ่านพอร์ต RS-485 ตัวแปลงอินเทอร์เฟซ RS-232/RS-485 เป็นสิ่งที่ขาดไม่ได้ (เช่น ตัวแปลง PD51) หรือการ์ด RS-485 การทำเครื่องหมายสายส่งสัญญาณสำหรับการ์ดในคอมพิวเตอร์พีซีขึ้นอยู่กับผู้ผลิตการ์ด หากต้องการเชื่อมต่อผ่านพอร์ต RS-232 สายเคเบิลที่เพิ่มเข้ากับโมดูลก็เพียงพอแล้ว วิธีการเชื่อมต่อพอร์ตทั้งสอง (RS-232 และ RS-485) แสดงอยู่ในรูปที่ 5
โมดูลสามารถเชื่อมต่อกับอุปกรณ์หลักผ่านพอร์ตอินเทอร์เฟซเดียวเท่านั้น ในกรณีที่เชื่อมต่อพอร์ตทั้งสองพร้อมกัน โมดูลจะทำงานอย่างถูกต้องกับพอร์ต RS-232
5.1. คำอธิบายของการนำโปรโตคอล MODBUS ไปใช้
โปรโตคอลการส่งข้อมูลอธิบายวิธีการแลกเปลี่ยนข้อมูลระหว่างอุปกรณ์ผ่านอินเทอร์เฟซแบบอนุกรม
โปรโตคอล MODBUS ถูกนำมาใช้ในโมดูลตามข้อกำหนด PI-MBUS-300 Rev G ของบริษัท Modicon
ชุดพารามิเตอร์อินเทอร์เฟซแบบอนุกรมของโมดูลในโปรโตคอล MODBUS:
– ที่อยู่โมดูล: 1…247
– อัตราบอด: 2400, 4800, 19200, 38400 บิต/วินาที
– โหมดการทำงาน: ASCII, RTU
– หน่วยข้อมูล: ASCII: 8N1, 7E1, 7O1,
RTU: 8N2, 8E1, 8O1, 8N1
– เวลาตอบสนองสูงสุด: 300 ms
การกำหนดค่าพารามิเตอร์ของอินเทอร์เฟซแบบอนุกรมมีอธิบายไว้ในส่วนเพิ่มเติมของคู่มือผู้ใช้นี้ ประกอบด้วยการชำระอัตราบอด (พารามิเตอร์อัตรา) ที่อยู่อุปกรณ์ (พารามิเตอร์ที่อยู่) และประเภทของหน่วยข้อมูล (พารามิเตอร์โหมด)
ในกรณีของการเชื่อมต่อโมดูลกับคอมพิวเตอร์ผ่านสายเคเบิล RS-232 โมดูลจะตั้งค่าพารามิเตอร์การส่งโดยอัตโนมัติเป็นค่า:
อัตราการส่งข้อมูล: 9600 บาท/วินาที
ในการใช้งานโหมด: อาร์ทียู 8N1
ที่อยู่: 1
บันทึก: แต่ละโมดูลที่เชื่อมต่อกับเครือข่ายการสื่อสารต้อง:
- มีที่อยู่เฉพาะซึ่งแตกต่างจากที่อยู่ของอุปกรณ์อื่น ๆ ที่เชื่อมต่ออยู่ในเครือข่าย
- มีอัตราบอดและประเภทหน่วยข้อมูลที่เหมือนกัน
- การส่งคำสั่งด้วยที่อยู่ „0” จะถูกระบุว่าเป็นโหมดกระจายเสียง (การส่งไปยังอุปกรณ์จำนวนมาก)
5.2. คำอธิบายของฟังก์ชันโปรโตคอล MODBUS
มีการใช้ฟังก์ชันโปรโตคอล MODBUS ต่อไปนี้ในโมดูล SM3:
คำอธิบายของฟังก์ชันโปรโตคอล MODBUS
ตารางที่ 2
| รหัส | ความหมาย |
| 03 (03 ชม.) | การอ่านค่า n-registers |
| 04 (04 ชม.) | การอ่านข้อมูลการลงทะเบียน n-input |
| 06 (06 ชม.) | เขียนทะเบียนเดียว |
| 16 (10 ชม.) | การเขียนของ n-registers |
| 17 (11 ชม.) | การระบุอุปกรณ์ทาส |
การอ่านค่า n-registers (รหัส 03h)
ไม่สามารถเข้าถึงฟังก์ชันในโหมดกระจายข้อมูล
Exampเลอ: การอ่านข้อมูลของ 2 รีจิสเตอร์ที่เริ่มต้นจากรีจิสเตอร์ที่มีที่อยู่ 1DBDh (7613):
ขอ:
| ที่อยู่อุปกรณ์ | การทำงาน | ลงทะเบียน ที่อยู่ สวัสดี | ลงทะเบียน ที่อยู่ ล | จำนวน ลงทะเบียน สวัสดี | จำนวน ทะเบียน ล | ผลรวมตรวจสอบ ซีอาร์ซี |
| 01 | 03 | 1D | BD | 00 | 02 | 52 43 |
การตอบสนอง:
| ที่อยู่อุปกรณ์ | การทำงาน | จำนวนไบต์ | ค่าจากการลงทะเบียน 1DBD (7613) | ค่าจากการลงทะเบียน 1DBE (7614) | เช็คซัม CRC | ||||||
| 01 | 03 | 08 | 3F | 80 | 00 | 00 | 40 | 00 | 00 | 00 | 42 8บี |
การอ่านข้อมูลการลงทะเบียน n- input (kode 04h)
ฟังก์ชันไม่สามารถเข้าถึงได้ในโหมดกระจายข้อมูล
Exampเลอ: การอ่านหนึ่งรีจิสเตอร์ที่มีที่อยู่ 0FA3h (4003) เริ่มต้นจากรีจิสเตอร์ที่มี 1DBDh (7613)
ขอ:
| ที่อยู่อุปกรณ์ | การทำงาน | ลงทะเบียน ที่อยู่ สวัสดี | ลงทะเบียน ที่อยู่ ล | จำนวน ลงทะเบียน สวัสดี | จำนวน ทะเบียน ล | ผลรวมตรวจสอบ ซีอาร์ซี |
| 01 | 04 | 0F | A3 | 00 | 01 | ซีทู เอฟซี |
การตอบสนอง:
| ที่อยู่อุปกรณ์ | การทำงาน | จำนวนไบต์ | คุณค่าจาก ลงทะเบียน 0FA3 (4003) | เช็คซัม CRC | |
| 01 | 04 | 02 | 00 | 01 | 78 เอฟ0 |
เขียนค่าลงในรีจิสเตอร์ (รหัส 06h)
ฟังก์ชั่นนี้สามารถเข้าถึงได้ในโหมดกระจายเสียง
Exampเลอ: เขียนการลงทะเบียนด้วยที่อยู่ 1DBDh (7613)
ขอ:
| ที่อยู่อุปกรณ์ | การทำงาน | ที่อยู่ลงทะเบียน สวัสดี | ลงทะเบียน ที่อยู่ ล | ค่าจากการลงทะเบียน 1DBD (7613) | เช็คซัม CRC | |||
| 01 | 06 | 1D | BD | 3F | 80 | 00 | 00 | 85โฆษณา |
การตอบสนอง:
| ที่อยู่อุปกรณ์ | การทำงาน | ลงทะเบียน ที่อยู่ สวัสดี | ที่อยู่สำหรับลงทะเบียน Lo | ค่าจากการลงทะเบียน 1DBD (7613) | เช็คซัม CRC | |||
| 01 | 06 | 1D | BD | 3F | 80 | 00 | 00 | 85โฆษณา |
เขียนถึง n-registers (รหัส 10h)
ฟังก์ชันนี้สามารถเข้าถึงได้ในโหมดออกอากาศ
Exampเลอ: เขียน 2 การลงทะเบียนเริ่มต้นจากการลงทะเบียนด้วย 1DBDh (7613) ad-
ขอ:
| อุปกรณ์ ที่อยู่ | การทำงาน | ลงทะเบียน ที่อยู่ | จำนวน ลงทะเบียน | จำนวนไบต์ | ค่าจากทะเบียน 1DBD (7613) | คุณค่าจาก ลงทะเบียน 1DBE (7614) | ตรวจสอบ- ผลรวม CRC | ||||||||
| Hi | Lo | Hi | Lo | ||||||||||||
| 01 | 10 | 1D | BD | 00 | 02 | 08 | 3F | 80 | 00 | 00 | 40 | 00 | 00 | 00 | 03 09 |
การตอบสนอง:
| ที่อยู่อุปกรณ์ | การทำงาน | ลงทะเบียน ที่อยู่ สวัสดี | ลงทะเบียน ที่อยู่ ล | จำนวน ลงทะเบียน สวัสดี | จำนวน ทะเบียน ล | ผลรวมตรวจสอบ (ซีอาร์ซี) |
| 01 | 10 | 1D | BD | 00 | 02 | D7 80 |
รายงานระบุอุปกรณ์ (รหัส 11h)
ขอ:
| ที่อยู่อุปกรณ์ | การทำงาน | เช็คซัม (CRC) |
| 01 | 11 | ซี0 2ซี |
การตอบสนอง:
| ที่อยู่อุปกรณ์ | การทำงาน | จำนวนไบต์ | ตัวระบุอุปกรณ์ | สถานะอุปกรณ์ | หมายเลขเวอร์ชันซอฟต์แวร์ | ผลรวมตรวจสอบ |
| 01 | 11 | 06 | 8C | FF | 3เอฟ 80 00 00 | เอ6เอฟ3 |
ที่อยู่อุปกรณ์ – 01
ฟังก์ชัน – ฟังก์ชัน No: 0x11;
จำนวนไบต์ - 0x06
ตัวระบุอุปกรณ์ – 0x8B
สถานะอุปกรณ์ – 0xFF
เวอร์ชันซอฟต์แวร์ ไม่ใช่ – เวอร์ชันที่ใช้งานในโมดูล: 1.00
XXXX – ตัวแปร 4 ไบต์ของประเภทโฟลต
Checksum – 2 ไบต์ในกรณีที่ทำงานในโหมด RTU
– 1 ไบต์ในกรณีที่ทำงานในโหมด ASCII
5.3. แผนที่การลงทะเบียนโมดูล
ลงทะเบียนแผนที่ของโมดูล SM3
| ที่อยู่ พิสัย | ค่า พิมพ์ | คำอธิบาย |
| 4000-4100 | int, ลอย (16 บิต) | ค่านี้อยู่ในการลงทะเบียนแบบ 16 บิต การลงทะเบียนใช้สำหรับการอ่านเท่านั้น |
| 4200-4300 | int (16 บิต) | ค่านี้อยู่ในการลงทะเบียนแบบ 16 บิต เนื้อหาการลงทะเบียนสอดคล้องกับเนื้อหาการลงทะเบียน 32 บิตจากพื้นที่ 7600 รีจิสเตอร์สามารถอ่านออกและเขียนได้ |
| 7500-7600 | ลอย (32 บิต) | ค่านี้อยู่ในการลงทะเบียนแบบ 32 บิต การลงทะเบียนใช้สำหรับการอ่านเท่านั้น |
| 7600-7700 | ลอย (32 บิต) | ค่านี้อยู่ในการลงทะเบียนแบบ 32 บิต สามารถอ่านและเขียนรีจิสเตอร์ได้ |
5.4. ชุดของการลงทะเบียนโมดูล
ชุดรีจิสเตอร์สำหรับอ่านค่าโมดูล SM3
| ค่านี้อยู่ในการลงทะเบียนแบบ 16 บิต | ชื่อ | พิสัย | ประเภทลงทะเบียน | ชื่อปริมาณ |
| 4000 | ตัวระบุ | – | ภายใน | การระบุอุปกรณ์อย่างต่อเนื่อง (0x8B) |
| 4001 | สถานะ 1 | ภายใน | Status1 คือรีจิสเตอร์ที่อธิบายสถานะปัจจุบันของอินพุตลอจิก | |
| 4002 | สถานะ 2 | – | ภายใน | Status2 คือรีจิสเตอร์ที่อธิบายพารามิเตอร์การส่งปัจจุบัน |
| 4003 | W1 | 0… 1 | ภายใน | ค่าสถานะการอ่านออกของอินพุต 1 |
| 4004 | W2 | 0… 1 | ภายใน | ค่าสถานะการอ่านออกของอินพุต 2 |
| 4005 | WMG1_H |
– |
ยาว | ผลลัพธ์ที่ได้รับจากการดำเนินการหารของตัวนับหลักและค่าน้ำหนัก สำหรับอินพุต 1 (รีจิสเตอร์นับจำนวนนับล้านของผลลัพธ์ทั้งหมด) – คำที่สูงกว่า |
| 4006 | WMG1_L | ผลลัพธ์ที่ได้รับจากการดำเนินการหารของตัวนับหลักและค่าน้ำหนัก สำหรับอินพุต 1 (รีจิสเตอร์นับจำนวนนับล้านของผลลัพธ์ทั้งหมด) – คำล่าง | ||
| 4007 | WMP1_H |
– |
ยาว | ผลลัพธ์ที่ได้รับจากการดำเนินการหารของตัวนับหลักและค่าน้ำหนัก สำหรับอินพุต 1 (รีจิสเตอร์นับจำนวนนับล้านของผลลัพธ์ทั้งหมด) – คำที่สูงกว่า |
| 4008 | WMP1_L | ผลลัพธ์ที่ได้รับจากการดำเนินการหารของตัวนับหลักและค่าน้ำหนัก สำหรับอินพุต 1 (รีจิสเตอร์นับจำนวนนับล้านของผลลัพธ์ทั้งหมด) – คำล่าง | ||
| 4009 | WMG2_H |
– |
ยาว | ผลลัพธ์ที่ได้รับจากการดำเนินการหารของตัวนับหลักและค่าน้ำหนัก สำหรับอินพุต 2 (รีจิสเตอร์นับจำนวนนับล้านของผลลัพธ์ทั้งหมด) – คำที่สูงกว่า |
| 4010 | WMG2_L | ผลลัพธ์ที่ได้จากการหารตัวเศษหลักและค่าน้ำหนัก สำหรับอินพุต 2 (รีจิสเตอร์จะนับจำนวนนับล้านของผลลัพธ์ทั้งหมด) - คำล่าง |
| 4011 | WMP2_H |
– |
ยาว | ผลลัพธ์ที่ได้รับจากการดำเนินการหารของตัวนับหลักและค่าน้ำหนัก สำหรับอินพุต 2 (รีจิสเตอร์นับจำนวนนับล้านของผลลัพธ์ทั้งหมด) – คำที่สูงกว่า |
| 4012 | WMP2_L | ผลลัพธ์ที่ได้รับจากการดำเนินการหารของตัวนับหลักและค่าน้ำหนัก สำหรับอินพุต 2 (รีจิสเตอร์นับจำนวนนับล้านของผลลัพธ์ทั้งหมด) – คำล่าง | ||
| 4013 | WG1_H | 0… 999999 | ลอย | ผลลัพธ์ที่ได้รับจากการดำเนินการหารของตัวนับหลักและค่าน้ำหนัก สำหรับอินพุต 1 (รีจิสเตอร์นับจำนวนนับล้านของผลลัพธ์ทั้งหมด) – คำที่สูงกว่า |
| 4014 | WG1_L | ผลลัพธ์ที่ได้รับจากการดำเนินการหารของตัวนับหลักและค่าน้ำหนัก สำหรับอินพุต 1 (รีจิสเตอร์นับจำนวนนับล้านของผลลัพธ์ทั้งหมด) – คำล่าง | ||
| 4015 | WP1_H | 0… 999999 | ลอย | ผลลัพธ์ที่ได้รับจากการดำเนินการหารของตัวนับหลักและค่าน้ำหนัก สำหรับอินพุต 1 (รีจิสเตอร์นับจำนวนนับล้านของผลลัพธ์ทั้งหมด) – คำที่สูงกว่า |
| 4016 | WP1_L | ผลลัพธ์ที่ได้รับจากการดำเนินการหารของตัวนับหลักและค่าน้ำหนัก สำหรับอินพุต 1 (รีจิสเตอร์นับจำนวนนับล้านของผลลัพธ์ทั้งหมด) – คำล่าง | ||
| 4017 | WG2_H | 0… 999999 | ลอย | ผลลัพธ์ที่ได้รับจากการดำเนินการหารของตัวนับหลักและค่าน้ำหนัก สำหรับอินพุต 2 (รีจิสเตอร์นับจำนวนนับล้านของผลลัพธ์ทั้งหมด) – คำที่สูงกว่า |
| 4018 | WG2_L | ผลลัพธ์ที่ได้รับจากการดำเนินการหารของตัวนับหลักและค่าน้ำหนัก สำหรับอินพุต 2 (รีจิสเตอร์นับจำนวนนับล้านของผลลัพธ์ทั้งหมด) – คำล่าง | ||
| 4019 | WP2_H | 0… 999999 | ลอย | ผลลัพธ์ที่ได้รับจากการดำเนินการหารของตัวนับหลักและค่าน้ำหนัก สำหรับอินพุต 2 (รีจิสเตอร์นับจำนวนนับล้านของผลลัพธ์ทั้งหมด) – คำที่สูงกว่า |
| 4020 | WP2_L | ผลลัพธ์ที่ได้รับจากการดำเนินการหารของตัวนับหลักและค่าน้ำหนัก สำหรับอินพุต 2 (รีจิสเตอร์นับจำนวนนับล้านของผลลัพธ์ทั้งหมด) – คำล่าง |
| 4021 | LG1_H | 0… (2 32 – 1) | ยาว | ค่าของตัวนับอิมพัลส์หลักสำหรับอินพุต 1 (คำที่สูงกว่า) |
| 4022 | LG1_L | ค่าของตัวนับอิมพัลส์หลักสำหรับอินพุต 1 (คำล่าง) | ||
| 4023 | LP1_H | 0… (2 32 – 1) | ยาว | ค่าของตัวนับอิมพัลส์หลักสำหรับอินพุต 1 (คำที่สูงกว่า) |
| 4024 | LP1_L | ค่าของตัวนับอิมพัลส์หลักสำหรับอินพุต 1 (คำล่าง) | ||
| 4025 | LG2_H | 0… (2 32 – 1) | ยาว | ค่าของตัวนับอิมพัลส์หลักสำหรับอินพุต 2 (คำที่สูงกว่า) |
| 4026 | LG2_L | ค่าของตัวนับอิมพัลส์หลักสำหรับอินพุต 2 (คำล่าง) | ||
| 4027 | LP2_H | 0… (2 32 – 1) | ยาว | ค่าของตัวนับอิมพัลส์เสริมสำหรับอินพุต 2 (คำที่สูงกว่า) |
| 4028 | LP2_L | ค่าของตัวนับอิมพัลส์เสริมสำหรับอินพุต 2 (คำล่าง) | ||
| 4029 | สถานะ3 | – | ภายใน | สถานะข้อผิดพลาดของอุปกรณ์ |
| 4030 | รีเซ็ต | 0… (2 16 – 1) | ภายใน | ตัวนับจำนวนอุปกรณ์ที่ลดลง |
ชุดของการลงทะเบียนเพื่ออ่านค่าโมดูล SM3 (ที่อยู่ 75xx)
| ชื่อ | พิสัย | ประเภทลงทะเบียน | ชื่อปริมาณ | |
| ค่าที่ฉันลงทะเบียน | ||||
| 7500 | ตัวระบุ | – | ลอย | การระบุอุปกรณ์อย่างต่อเนื่อง (0x8B) |
| 7501 | สถานะ 1 | – | ลอย | สถานะ 1 คือรีจิสเตอร์ที่อธิบายสถานะอินพุตลอจิกปัจจุบัน |
| 7502 | สถานะ 2 | – | ลอย | สถานะ 2 คือรีจิสเตอร์ที่อธิบายพารามิเตอร์การส่งปัจจุบัน |
| 7503 | W1 | 0… 1 | ลอย | ค่าของสถานะการอ่านออกของอินพุต 1 |
| 7504 | W2 | 0… 1 | ลอย | ค่าของสถานะการอ่านออกของอินพุต 2 |
| 7505 | ดับเบิลยูจี 1 | 0… (2 16 – 1) | ลอย | ผลลัพธ์ที่ได้รับจากการดำเนินการหารของตัวนับหลักและค่าน้ำหนัก สำหรับอินพุต 1 |
| 7506 | ดับเบิ้ลยูพี1 | – | ลอย | ผลลัพธ์ที่ได้รับจากการดำเนินการหารของตัวนับเสริมและค่าน้ำหนักสำหรับอินพุต 1 |
| 7507 | ดับเบิลยูจี 2 | – | ลอย | ผลลัพธ์ที่ได้รับจากการดำเนินการหารของตัวนับหลักและค่าน้ำหนัก สำหรับอินพุต 2 |
| 7508 | ดับเบิ้ลยูพี2 | – | ลอย | ผลลัพธ์ที่ได้รับจากการดำเนินการหารของตัวนับเสริมและค่าน้ำหนักสำหรับอินพุต 2 |
| 7509 | แอลจี1 | 0… (2 32 – 1) | ลอย | ค่าของตัวนับอิมพัลส์หลักสำหรับอินพุต 1 |
| 7510 | LP1 | 0… (2 32 – 1) | ลอย | ค่าของตัวนับอิมพัลส์เสริมสำหรับอินพุต 1 |
| 7511 | LP2 | 0… (2 32 – 1) | ลอย | ค่าของตัวนับอิมพัลส์หลักสำหรับอินพุต 2 |
| 7512 | LP2 | 0… (2 32 – 1) | ลอย | ค่าของตัวนับอิมพัลส์เสริมสำหรับอินพุต 2 |
| 7513 | สถานะ3 | ลอย | สถานะข้อผิดพลาดของอุปกรณ์ | |
| 7514 | รีเซ็ต | 0… (2 16 – 1) | ลอย | ตัวนับจำนวนอุปกรณ์ที่ลดลง |
คำอธิบายของการลงทะเบียนสถานะ 1
 Bit-15…2 ไม่ได้ใช้สถานะ 0
Bit-15…2 ไม่ได้ใช้สถานะ 0
สถานะ Bit-1 ของอินพุต IN2
0 – สถานะเปิดหรือไม่ได้ใช้งาน
1 – สถานะลัดวงจรหรือใช้งานอยู่
สถานะ Bit-0 ของอินพุต IN1
0 – สถานะเปิดหรือไม่ได้ใช้งาน
1 – สถานะลัดวงจรหรือใช้งานอยู่
คำอธิบายของการลงทะเบียนสถานะ 2 Bit-15…6 ไม่ได้ใช้สถานะ 0
Bit-15…6 ไม่ได้ใช้สถานะ 0
Bit-5…3 โหมดการทำงานและหน่วยข้อมูล
000 – ปิดอินเทอร์เฟซ
001 – 8N1 – แอสกี
010 – 7E1 – แอสกี
011 – 7O1 – แอสกี
100 – 8N2 – อาร์ทียู
101 – 8E1 – RTU
110 – 8O1 – อาร์ทียู
111 – 8N1 – อาร์ทียู
Bit-2…0 อัตราบอด
000 – 2400 บิต/วินาที
001 – 4800 บิต/วินาที
010 – 9600 บิต/วินาที
011 – 19200 บิต/วินาที
100 – 38400 บิต/วินาที
คำอธิบายของการลงทะเบียนสถานะ 3 Bit-1…0 ข้อผิดพลาดของหน่วยความจำ FRAM – ตัวนับหลัก 1
Bit-1…0 ข้อผิดพลาดของหน่วยความจำ FRAM – ตัวนับหลัก 1
00 – ขาดข้อผิดพลาด
01 – ข้อผิดพลาดในการเขียน/อ่านข้อมูลจากพื้นที่หน่วยความจำ 1
10 – ข้อผิดพลาดในการเขียน/อ่านข้อมูลจากพื้นที่หน่วยความจำ 1 และ 2
11 – ข้อผิดพลาดในการเขียน/อ่านข้อมูลของบล็อกหน่วยความจำทั้งหมด (การสูญเสียค่าตัวนับ)
Bit-5…4 ข้อผิดพลาดของหน่วยความจำ FRAM – ตัวนับเสริม 1
00 – ขาดข้อผิดพลาด
01 – ข้อผิดพลาดในการเขียน/อ่านข้อมูลจากพื้นที่หน่วยความจำลำดับที่ 1
10 – ข้อผิดพลาดในการเขียน/อ่านข้อมูลจากพื้นที่หน่วยความจำที่ 1 และ 2
11 – ข้อผิดพลาดในการเขียน/อ่านข้อมูลของบล็อกหน่วยความจำทั้งหมด (การสูญเสียค่าตัวนับ)
Bit-9…8 ข้อผิดพลาดของหน่วยความจำ FRAM – ตัวนับหลัก 2
00 – ขาดข้อผิดพลาด
01 – ข้อผิดพลาดในการเขียน/อ่านข้อมูลจากพื้นที่หน่วยความจำที่ 1
10 – ข้อผิดพลาดในการเขียน/อ่านข้อมูลจากพื้นที่หน่วยความจำที่ 1 และ 2 1 และ 2
11 – ข้อผิดพลาดในการเขียน/อ่านข้อมูลของบล็อกหน่วยความจำทั้งหมด (การสูญเสียค่าตัวนับ)
Bit-13…12 ข้อผิดพลาดของหน่วยความจำ FRAM – ตัวนับเสริม 2
00 – ขาดข้อผิดพลาด
01 – ข้อผิดพลาดในการเขียน/อ่านข้อมูลจากพื้นที่หน่วยความจำที่ 1
10 – ข้อผิดพลาดในการเขียน/อ่านข้อมูลจากพื้นที่หน่วยความจำที่ 1 และ 2
11 – ข้อผิดพลาดในการเขียน/อ่านข้อมูลของบล็อกหน่วยความจำทั้งหมด (การสูญเสียค่าตัวนับ)
บิต-15…6, 3…2, 7…6, 11…10, 15…14 ไม่ใช้ สถานะ 0
ชุดของการลงทะเบียนเพื่ออ่านและเขียนโมดูล SM3 (ที่อยู่ 76xx)
ตารางที่ 6
| ค่าของประเภทโฟลตจะอยู่ในการลงทะเบียนแบบ 32 บิต | ค่าของประเภท int อยู่ในการลงทะเบียนแบบ 16 บิต | พิสัย | ชื่อ | ชื่อปริมาณ |
| 7600 | 4200 | – | ตัวระบุ | ตัวระบุ (0x8B) |
| 7601 | 4201 | 0… 4 | บอดเรท | อัตรารับส่งข้อมูลของอินเทอร์เฟซ RS 0 – 2400 b/s 1 – 4800 บ/วินาที 2 – 9600 บ/วินาที 3 – 19200 บ/วินาที 4 – 38400 บ/วินาที |
| 7602 | 4202 | 0… 7 | โหมด | โหมดการทำงานของอินเตอร์เฟส RS 0 – อินเตอร์เฟสปิดอยู่ 1 – แอสกี 8N1 2 – ASCII 7E1 3 – แอสกี 7O1 4 – RTU 8N2 5 – RTU 8E1 ? 6 – RTU 8O1 7 – RTU 8N1 |
| 7603 | 4203 | 0… 247 | ที่อยู่ | ที่อยู่อุปกรณ์บนบัส Modbus |
| 7604 | 4204 | 0… 1 | นำมาใช้ | การยอมรับการเปลี่ยนแปลงสำหรับการลงทะเบียน 7601-7603 0 – ขาดการยอมรับ 1 – การยอมรับการเปลี่ยนแปลง |
| 7605 | 4205 | 0… 1 | โหมดการทำงาน | โหมดการทำงานของอุปกรณ์: 0 – อินพุตลอจิก 1 – อินพุตตัวนับ |
| 7606 | 4206 | 0… 11 | คำแนะนำ | ลงทะเบียนคำแนะนำ: 1 – การลบตัวนับเสริมสำหรับอินพุต 1 2 – การลบตัวนับเสริมสำหรับอินพุต 2 3 – การลบตัวนับหลักสำหรับอินพุต 1 (เฉพาะกับ RS-232) 4 – การลบตัวนับหลักสำหรับอินพุต 2 (เฉพาะกับ RS-232) 5 – การลบตัวนับเสริม 6 – การลบตัวนับหลัก (เฉพาะกับ RS232) 7 – การเขียนข้อมูลเริ่มต้นไปยังรีจิสเตอร์ 7605 – 7613 และ 4205 – 4211 (เฉพาะกับ RS232) 8 – เขียนข้อมูลเริ่มต้นไปยังรีจิสเตอร์ 7601 – 7613 และ 4201 – 4211 (เฉพาะกับ RS232) 9 – รีเซ็ตอุปกรณ์ 10 – การลบการลงทะเบียนสถานะข้อผิดพลาด 11 – การลบการลงทะเบียนหมายเลขรีเซ็ต |
| 7607 | 4207 | 0… 3 | สถานะใช้งาน | สถานะใช้งานสำหรับอินพุตอุปกรณ์: 0x00 – สถานะใช้งาน “0” สำหรับ IN1, สถานะใช้งาน “0” สำหรับ IN2 0x01 – สถานะใช้งาน “1” สำหรับ IN1, สถานะใช้งาน “0” สำหรับ IN2 0x02 – สถานะใช้งาน “0” สำหรับ IN1, สถานะใช้งาน “1” สำหรับ IN2 0x03 – สถานะใช้งาน “1” สำหรับ IN1, สถานะใช้งาน “1” สำหรับ IN2 |
| 7608 | 4208 | 1…10000 | เวลาสำหรับการเปิดใช้งานระดับ 1 | ระยะเวลาของระดับสูงสำหรับ 1 แรงกระตุ้นสำหรับอินพุต 1 – (0.5 – 500 มิลลิวินาที) |
| 7609 | 4209 | 1…100000 | เวลาสำหรับระดับที่ไม่ได้ใช้งาน 1 | ระยะเวลาของระดับต่ำสำหรับ 1 อิมพัลส์สำหรับอินพุต 1 – (0.5 – 500 มิลลิวินาที) |
| 7610 | 4210 | 1…10000 | เวลาสำหรับการเปิดใช้งานระดับ 2 | ระยะเวลาของระดับสูงสำหรับ 1 แรงกระตุ้นสำหรับอินพุต 2 – (0.5 – 500 มิลลิวินาที) |
| 7611 | 4211 | 1…10000 | เวลาสำหรับระดับที่ไม่ได้ใช้งาน 2 | ระยะเวลาของระดับต่ำสำหรับ 1 อิมพัลส์สำหรับอินพุต 2 – (0.5 – 500 มิลลิวินาที) |
| 7612 | 0.005…1000000 | น้ำหนัก 1 | ค่าน้ำหนักของอินพุต 1 | |
| 7613 | 0.005…1000000 | น้ำหนัก 2 | ค่าน้ำหนักของอินพุต 2 | |
| 7614 | 4212 | – | รหัส | รหัสเปิดใช้งานการเปลี่ยนแปลงในการลงทะเบียน 7605 – 7613 (4206 – 4211), รหัส – 112 |
เคาน์เตอร์อิมพัลส์
อินพุตอิมพัลส์ของตัวแปลงแต่ละตัวมีตัวนับอิมพัลส์ 32 บิตอิสระสองตัว - ตัวนับอิมพัลส์หลักและตัวเสริม สถานะสูงสุดของตัวนับคือ 4.294.967.295 (2?? – 1) แรงกระตุ้น
การเพิ่มขึ้นของตัวนับหนึ่งตัวตามมาพร้อมกันในขณะที่ตรวจจับสถานะแอ็คทีฟที่มีระยะเวลานานอย่างเหมาะสมบนอินพุทอิมพัลส์และสถานะตรงข้ามกับสถานะแอคทีฟที่มีระยะเวลานานอย่างเหมาะสม
6.1. เคาน์เตอร์หลัก
ตัวนับหลักสามารถอ่านออกได้โดยใช้ลิงก์การเขียนโปรแกรม RJ หรืออินเทอร์เฟซ RS485 แต่จะลบออกได้โดยใช้ลิงก์การเขียนโปรแกรมผ่านการเขียนค่าที่เหมาะสมลงในรีจิสเตอร์คำสั่งเท่านั้น (ดูตารางที่ 6) ในระหว่างการอ่าน เนื้อหาของคำที่เก่ากว่าและอายุน้อยกว่าของการลงทะเบียนตัวนับจะถูกเก็บไว้และจะไม่เปลี่ยนแปลงจนถึงจุดสิ้นสุดของการแลกเปลี่ยนเฟรมข้อมูล กลไกนี้ช่วยให้มั่นใจได้ว่าการอ่านข้อมูลอย่างปลอดภัยทั้งรีจิสเตอร์ 32 บิตทั้งหมดและส่วน 16 บิต
การเกิดขึ้นของโอเวอร์โฟลว์ตัวนับหลักไม่ได้ทำให้เกิดการหยุดการนับอิมพัลส์
สถานะตัวนับถูกเขียนในหน่วยความจำแบบไม่ลบเลือน
นอกจากนี้ยังมีการเขียน CRC ของการตรวจสอบซึ่งคำนวณจากเนื้อหาของตัวนับ
หลังจากเปลี่ยนแหล่งจ่ายแล้ว ตัวแปลงจะจำลองสถานะตัวนับจากข้อมูลที่เขียนและตรวจสอบผลรวม CRC ในกรณีที่เกิดความไม่สอดคล้องกันในการลงทะเบียนข้อผิดพลาด จะมีการตั้งค่าการทำเครื่องหมายข้อผิดพลาดที่เหมาะสม (ดูคำอธิบายสถานะ 3)
รีจิสเตอร์ของเคาน์เตอร์หลักอยู่ภายใต้แอดเดรส 4021 -4022 สำหรับอินพุต 1 และ 4025 – 4026 สำหรับอินพุต 2
6.2. เคาน์เตอร์เสริม
ตัวนับเสริมช่วยเติมเต็มบทบาทของตัวนับของผู้ใช้ ซึ่งสามารถลบได้ตลอดเวลา ทั้งโดยลิงก์การเขียนโปรแกรม RJ และจากระดับแอปพลิเคชันโดยอินเทอร์เฟซ RS-485
สิ่งนี้ดำเนินการโดยการเขียนค่าที่เหมาะสมลงในรีจิสเตอร์คำสั่ง (ดูตารางที่ 6)
กลไกการอ่านข้อมูลคล้ายกับที่อธิบายไว้ในกรณีของตัวนับหลัก
ตัวนับเสริมจะถูกรีเซ็ตโดยอัตโนมัติหลังจากโอเวอร์โฟลว์
Egisters ของตัวนับเสริมจะอยู่ภายใต้แอดเดรส 4023 – 4024 สำหรับอินพุต 1 และ 4027 – 4028 สำหรับอินพุต 2
การกำหนดค่าอินพุตอิมพัลส์
การกำหนดค่าพารามิเตอร์อุปกรณ์ที่อยู่ในรีจิสเตอร์ 7606 – 7613 (4206 – 4211) เป็นไปได้หลังจากเขียนค่า 112 ก่อนหน้านี้ไปยังรีจิสเตอร์ 7614 (4212)
การเขียนค่า 1 ไปยังรีจิสเตอร์ 7605 (4205) ทำให้เกิดการเปิดใช้งานอินพุตอิมพัลส์และฟังก์ชันการกำหนดค่าทั้งหมดที่เกี่ยวข้องกับโหมดการทำงานที่ใช้งานอยู่ สำหรับอินพุตอิมพัลส์แต่ละตัว สามารถตั้งโปรแกรมพารามิเตอร์ต่อไปนี้ได้: voltage ระดับอินพุตสำหรับสถานะใช้งานและระยะเวลาต่ำสุดของสถานะนี้และสถานะตรงกันข้ามกับสถานะใช้งาน นอกจากนี้ยังสามารถกำหนดค่าของน้ำหนักอิมพัลส์ให้กับแต่ละอินพุตได้
7.1 สถานะใช้งาน
การตั้งค่าที่เป็นไปได้ของสถานะใช้งานคือการลัดวงจร (สถานะสูงบนอินพุต) หรืออินพุตเปิด (สถานะต่ำบนอินพุต) การตั้งค่าสำหรับอินพุตทั้งสองอยู่ในรีจิสเตอร์ของที่อยู่ 7607, 4007 และค่าของมันมีความหมายดังต่อไปนี้:
สถานะแอ็คทีฟของอินพุต
ตารางที่ 7.
| ลงทะเบียน ค่า | สถานะแอ็คทีฟสำหรับอินพุต 2 | สถานะแอ็คทีฟสำหรับอินพุต 1 |
| 0 | สภาพต่ำ | สภาพต่ำ |
| 1 | สภาพต่ำ | สถานะสูง |
| 2 | สถานะสูง | สภาพต่ำ |
| 3 | สถานะสูง | สถานะสูง |
สถานะของอินพุทอิมพัลส์ โดยคำนึงถึงการกำหนดค่าโดยใช้รีจิสเตอร์ 7607 (4007) สามารถเข้าถึงได้ในรีจิสเตอร์สถานะของตัวแปลงหรือในรีจิสเตอร์ 7503, 7504 หรือ 4003, 4004
7.2. ระยะเวลาสถานะใช้งาน
คำจำกัดความของระยะเวลาสถานะแอ็คทีฟขั้นต่ำบนอินพุตช่วยให้สามารถกรองสัญญาณรบกวนที่สามารถปรากฏบนสายสัญญาณและการนับอิมพัลส์ที่มีระยะเวลาที่เหมาะสมเท่านั้น ระยะเวลาขั้นต่ำของสถานะแอ็คทีฟถูกกำหนดในช่วงตั้งแต่ 0.5 ถึง 500 มิลลิวินาทีในรีจิสเตอร์ที่มีที่อยู่ 7608 (สถานะแอ็คทีฟ), 7609 (สถานะตรงข้าม) สำหรับอินพุต 1 และด้วยแอดเดรส 7610 (สถานะแอ็คทีฟ), 7611 (ตรงข้าม state)สำหรับอินพุต2.
อิมพัลส์ที่สั้นกว่าจากค่าที่กำหนดในรีจิสเตอร์จะไม่ถูกนับ
อินพุตอิมพัลส์คือ sampนำในช่วงเวลา 0.5 มิลลิวินาที
7.3. น้ำหนักอินพุต
ผู้ใช้มีความเป็นไปได้ในการกำหนดค่าของน้ำหนักแรงกระตุ้น (registers
7612, 7613). ผลลัพธ์ถูกกำหนดด้วยวิธีต่อไปนี้:
ResultMeasurement_Y = CounterValue_X/น้ำหนักมูลค่า_X
ResultMeasurement_Y – ผลการวัดสำหรับอินพุตที่เหมาะสมและตัวนับที่เลือก
CounterValue_X – ค่าตัวนับของอินพุตที่เหมาะสมและตัวนับ CounterWeight_X ที่เลือก
– ค่าน้ำหนักสำหรับอินพุตที่เหมาะสม
ค่าที่กำหนดสามารถเข้าถึงได้ในรีจิสเตอร์ 16 บิตในช่วง 4005-4012 ตามตารางที่ 4 และในรีจิสเตอร์เดี่ยวประเภทลอยในช่วง 7505 – 7508 ตามตารางที่ 5 วิธีกำหนดค่าหลัก ผลลัพธ์ของตัวนับสำหรับอินพุต 1 ผ่านการอ่านค่าของรีจิสเตอร์ในช่วง 4005 – 4012 แสดงอยู่ด้านล่าง
ResultMeasurement_1 = 1000000* (ยาว)(WMG1_H, WMG1_L) + (ลอย)(WG1_H, WG1_L)
การวัดผลลัพธ์_1
– ผลลัพธ์โดยคำนึงถึงน้ำหนักของอินพุต 1 และตัวนับหลัก
(ยาว)(WMG1_H, WMG1_L) – คำที่สูงกว่าของผลลัพธ์ “ResultMeasurement_1”
ตัวแปรประเภทโฟลตประกอบด้วยรีจิสเตอร์ 16 บิตสองตัว: WMG1_H และ WMG1_L
(float)(WG1_H, WG1_L) – คำล่างของผลลัพธ์ “ResultMeasurement_1”
ตัวแปรประเภทโฟลตประกอบด้วยรีจิสเตอร์ 16 บิตสองตัว: WG1_H และ WG1_L
ผลลัพธ์ที่เหลืออยู่สำหรับอินพุต 2 และตัวนับเสริมจะถูกกำหนดในลักษณะเดียวกันกับในข้างต้น เช่นampเล.
7.4. พารามิเตอร์เริ่มต้น
หลังจากทำตามคำแนะนำ 7 (ดูตารางหมายเลข 5) อุปกรณ์จะถูกตั้งค่าเป็นพารามิเตอร์เริ่มต้นด้านล่าง:
- โหมดการทำงาน – 0
- สถานะเปิดใช้งาน – 3
- เวลาสำหรับระดับที่ใช้งาน 1 – 5 ms
- เวลาสำหรับระดับที่ไม่ใช้งาน 1 – 5 มิลลิวินาที
- เวลาสำหรับระดับที่ใช้งาน 2 – 5 ms
- เวลาสำหรับระดับที่ไม่ใช้งาน 2 – 5 มิลลิวินาที
- น้ำหนัก 1 – 1
- น้ำหนัก 2 – 1
หลังจากทำตามคำสั่ง 8 (ดูตารางหมายเลข 5) อุปกรณ์จะตั้งค่าพารามิเตอร์เริ่มต้นเพิ่มเติมดังต่อไปนี้:
- อัตราบอด RS – 9600 b/s
- โหมด RS – 8N1
- ที่อยู่ – 1
ข้อมูลทางเทคนิค
อินพุตลอจิก: แหล่งสัญญาณ – สัญญาณที่เป็นไปได้: – ระดับลอจิก: 0 ลอจิก: 0… 3 V
1 ตรรกะ: 3,5… 24 V
แหล่งสัญญาณ - ไม่มีสัญญาณที่เป็นไปได้:
– ระดับลอจิก: 0 ลอจิก – อินพุตเปิด
1 ลอจิก – อินพุตแบบย่อ
ความต้านทานไฟฟ้าลัดวงจรของหน้าสัมผัสที่ไม่มีศักย์ไฟฟ้า ≤ 10 kΩ
ความต้านทานการเปิดของหน้าสัมผัสที่ไม่มีศักย์ไฟฟ้า ≥ 40 kΩ
พารามิเตอร์ตัวนับ:
– เวลาอิมพัลส์ขั้นต่ำ (สำหรับสถานะสูง): 0.5 ms
– เวลาอิมพัลส์ขั้นต่ำ (สำหรับสถานะต่ำ): 0.5 ms
– ความถี่สูงสุด: 800 Hz
ข้อมูลการส่งข้อมูล:
ก) อินเตอร์เฟส RS-485: โปรโตคอลการส่ง: MODBUS
แอสกี: 8N1, 7E1, 7O1
RTU: อัตราบอด 8N2, 8E1, 8O1, 8N1
2400, 4800, 9600, 19200, 38400: 57600, 115200 บิต/วินาที ที่อยู่…………. 1…247
ข) อินเทอร์เฟซ RS-232:
โปรโตคอลการส่ง MODBUS RTU 8N1 อัตราบอด 9600 ที่อยู่ 1
การใช้พลังงานของโมดูล≤ 1.5 A
เงื่อนไขการทำงานที่ได้รับการจัดอันดับ:
– ปริมาณอุปทานtage: 20…24…40 V ac/dc หรือ หรือ 85…230…253 V ac/dc
– ปริมาณอุปทานtage ความถี่- 40…50/60…440 Hz
– อุณหภูมิแวดล้อม- 0…23…55°C
– ความชื้นสัมพัทธ์- < 95% (การควบแน่นที่ยอมรับไม่ได้)
– สนามแม่เหล็กภายนอก- < 400 A/m
– ตำแหน่งงาน – อะไรก็ได้
สภาพการจัดเก็บและการจัดการ:
– อุณหภูมิแวดล้อม – 20… 70°C
– ความชื้นสัมพัทธ์ < 95 % (การควบแน่นที่ยอมรับไม่ได้)
– การสั่นสะเทือนแบบไซน์ไซด์ที่ยอมรับได้: 10…150 Hz
- ความถี่:
- การกระจัด ampความสูง 0.55 มม.
เกรดการป้องกันที่มั่นใจได้:
– จากด้านข้างตัวเรือนด้านหน้า: IP 40
– จากด้านเทอร์มินอล: IP 40
ขนาดรวม : 22.5 x 120 x 100 มม.
น้ำหนัก: < 0.25 กก.
ตัวเรือน: ดัดแปลงเพื่อประกอบบนราง
ความเข้ากันได้ทางแม่เหล็กไฟฟ้า:
– การป้องกันเสียงรบกวน EN 61000-6-2
– การปล่อยเสียงรบกวน EN 61000-6-4
ข้อกำหนดด้านความปลอดภัยตาม ถึง EN 61010-1:
– หมวดการติดตั้ง III
– มลพิษเกรด 2
ปริมาณเฟสต่อดินสูงสุดtage:
– สำหรับวงจรจ่ายไฟ 300 V
– สำหรับวงจรอื่นๆ : 50 V
ก่อนที่จะมีการประกาศความเสียหาย
| อาการ | ขั้นตอน | หมายเหตุ |
| 1. โมดูลไดโอดสีเขียวไม่ติดสว่าง | ตรวจสอบการเชื่อมต่อของสายเคเบิลเครือข่าย | |
| 2. โมดูลไม่ได้สร้างการสื่อสารกับอุปกรณ์หลักผ่านพอร์ต RS-232 | ตรวจสอบว่าสายเคเบิลเชื่อมต่อกับซ็อกเก็ตที่เหมาะสมในโมดูลหรือไม่ ตรวจสอบว่าอุปกรณ์หลักตั้งค่าอัตราบอด 9600, โหมด 8N1, ที่อยู่ 1 หรือไม่ | (RS-232 มีพารามิเตอร์การส่งข้อมูลคงที่) |
| ขาดการส่งสัญญาณการส่งสัญญาณบน RxD และ | ||
| ไดโอด TxD | ||
| 3. โมดูลไม่สร้างการสื่อสารกับอุปกรณ์หลักผ่านพอร์ต RS-485 ขาดการส่งสัญญาณการส่งสัญญาณบนไดโอด RxD และ TxD | ตรวจสอบว่าสายเคเบิลเชื่อมต่อกับซ็อกเก็ตที่เหมาะสมในโมดูลหรือไม่ ตรวจสอบว่าอุปกรณ์หลักตั้งค่าพารามิเตอร์การส่งข้อมูลเดียวกันกับโมดูลหรือไม่ (อัตราบอด โหมด ที่อยู่) ในกรณีที่จำเป็นต้องเปลี่ยนพารามิเตอร์การส่งข้อมูลเมื่อไม่สามารถสื่อสารผ่าน RS-485 ได้ จะต้องใช้พอร์ต RS-232 ซึ่งมีพารามิเตอร์การส่งข้อมูลคงที่ (ในกรณีที่มีปัญหาเพิ่มเติม โปรดดูจุดที่ 2) หลังจากเปลี่ยนพารามิเตอร์ RS-485 เป็นที่ต้องการแล้ว เราสามารถเปลี่ยนเป็นพอร์ต RS-885 ได้ |
รหัสการสั่งซื้อ
ตารางที่ 6 * หมายเลขรหัสกำหนดโดยผู้ผลิต EXAMPLE ของการสั่งซื้อ
* หมายเลขรหัสกำหนดโดยผู้ผลิต EXAMPLE ของการสั่งซื้อ
เมื่อสั่งซื้อโปรดเคารพหมายเลขรหัสที่ต่อเนื่องกัน
รหัส: SM3 – 1 00 7 หมายถึง :
SM3 – โมดูล 2 แชนเนลของอินพุตไบนารี
1 – ปริมาณอุปทานtage : 85…230…253 Va.c./dc
00 – รุ่นมาตรฐาน
7 – พร้อมใบรับรองการตรวจสอบคุณภาพพิเศษ
![]() ลูเมล ซา
ลูเมล ซา
ยูล Słubicka 4, 65-127 Zielona Góra โปแลนด์
โทรศัพท์: +48 68 45 75 100 แฟกซ์ +48 68 45 75 508
www.lumel.com.pl
การสนับสนุนด้านเทคนิค:
โทร.: (+48 68) 45 75 143, 45 75 141, 45 75 144, 45 75 140
อีเมล: อีเมลส่งออก@lumel.com.pl
แผนกส่งออก:
โทร.: (+48 68) 45 75 130, 45 75 131, 45 75 132
อีเมล: อีเมลส่งออก@lumel.com.pl
การสอบเทียบและการรับรอง:
อีเมล: laboratorium@lumel.com.pl
SM3-09C 29.11.21
60-006-00-00371
เอกสาร / แหล่งข้อมูล
 | LUMEL SM3 โมดูล 2 แชนแนลของอินพุตลอจิกหรือตัวนับ [พีดีเอฟ] คู่มือการใช้งาน SM3 โมดูล 2 แชนแนลของอินพุตลอจิกหรือตัวนับ, SM3, โมดูล 2 แชนแนลของอินพุตลอจิกหรือตัวนับ, อินพุตลอจิกหรือตัวนับ |



