![]() מודול 2 ערוצים
מודול 2 ערוצים
של כניסות לוגיקה או נגד
SM3
![]()
בַּקָשָׁה
מודול של כניסות לוגיות
מודול SM3 של שתי כניסות לוגיות נועד לאסוף מצבים לוגיים של כניסות לוגיות ולהנגיש אותם למערכות תעשייתיות מבוססות מחשב הפועלות על בסיס ממשק RS-485.
למודול 2 כניסות לוגיות וממשק RS-485 עם פרוטוקולי שידור MODBUS RTU ו-ASCII.
יציאות RS-485 ו-RS-232 מבודדות באופן גלווני מאותות כניסה ואספקה.
תכנות המודול אפשרי באמצעות יציאת RS-485 או RS-232.
בערכת המודולים SM3 יש כבל חיבור לחיבור למחשב ה-PC (RS-232).
פרמטרים של מודול:
- שתי כניסות לוגיות,
– ממשק תקשורת RS-485 עם פרוטוקולי שידור MODBUS RTU ו-ASCII לפעול במערכות מבוססות מחשב עם איתות השידור האופטי המבוסס על דיודות LED,
- קצב העברת נתונים ניתן להגדרה: 2400, 4800, 9600, 19299, 38400 סיביות לשנייה.
מודול כממיר דחפים.
מודול SM3 הפועל כממיר דחפים נועד להוסיף התקני מדידה המצוידים בכניסות דחף, למשל מדי וואט-שעה, מדי חום, מדי גז, מתמרי זרימה א.ש., למערכות מחשב.
לאחר מכן, ממיר SM3 מאפשר קריאה מרחוק של מצב המונה במערכות חשבונאות אוטומטיות. לממיר 2 כניסות דחף וממשק RS-485 עם פרוטוקולי שידור MODBUS RTU ו-ASCII, מה שמאפשר את היישום שלו במערכות מחשב עם Wizcon, Fix, In Touch, Genesis 32 (Iconics) ותוכניות ויזואליזציה נוספות.
פרמטרים של ממיר:
- שתי כניסות דחף, מוגדרות באופן עצמאי:
- מצב פעיל הניתן לתכנות של כניסות (רמה גבוהה או נמוכה של נפח הקלטtagה),
- מסנן ניתן לתכנות עבור דחפי כניסה עם רמת זמן מוגדרת (בנפרד לרמה גבוהה ונמוכה),
– ספירת דחפים עד לערך 4.294.967.295 ועם הגנה מפני מחיקה מרמת היישום,
- מוני דחפי עזר עם אפשרות מחיקה בכל זמן,
- רגיסטרים לא נדיפים המאחסנים את משקלם של דחפים שנספרו,
– 4 אוגרים נפרדים המכילים את התוצאה של חלוקות ערכי המונה עם ערכי משקל של דחפים שנספרו, - ממשק תקשורת RS-485 עם פרוטוקולי שידור MODBUS RTU ו-ASCII לעבודה במערכות מחשב עם איתות שידור אופטי על דיודות LED,
- קצב שידור ניתן להגדרה: 2400, 4800, 9600, 19200, 134800 סיביות/שנייה,
- ממשק תכנות על הלוח הקדמי מסוג RJ (רמות TTL),
- מספר דרכים להגדרת פרמטרי שידור:
- מתוכנת - באמצעות ממשק התכנות RJ בלוח הקדמי,
– מתוכנת – מרמת האפליקציה, באמצעות אפיק RS-485, - אחסון מצב המונה בזיכרון הלא נדיף יחד עם סכום הבדיקה של ה-CRC,
- ספירה של דעיכה באספקה,
- זיהוי מצבי חירום.
סט מודולים
- מודול SM3 …………………………………………. 1 מחשב
- מדריך למשתמש ………………………………………….. 1 יחידה
- תקע חור של שקע RS-232 …………….. 1 יחידה
בעת פירוק המודול, אנא בדוק את שלמות המסירה והאם הסוג וקוד הגרסה על לוחית הנתונים תואמים להזמנה.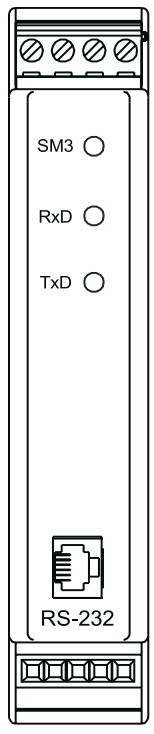 איור 1 View של מודול SM3
איור 1 View של מודול SM3
דרישות בטיחות בסיסיות, בטיחות תפעולית
סמלים הנמצאים במדריך שירות זה פירושם:
![]() אַזהָרָה!
אַזהָרָה!
אזהרה מפני מצבים פוטנציאליים ומסוכנים. חשוב במיוחד. יש להכיר זאת לפני חיבור המודול. אי ציות להודעות המסומנות בסמלים אלה עלול לגרום לפציעות חמורות של הצוות ולנזק של המכשיר.
![]() זְהִירוּת!
זְהִירוּת!
מציין הערה שימושית כללית. אם אתה מתבונן בו, הטיפול במודול נעשה קל יותר. יש לשים לב לכך, כאשר המודול פועל בצורה לא עקבית עם הציפיות. השלכות אפשריות אם מתעלמים ממנו!
בהיקף האבטחה המודול עומד בדרישות התקן EN 61010 -1.
הערות בנוגע לבטיחות המפעיל:
1. כְּלָלִי ![]()
- מודול SM3 מיועד להרכבה על מסילה של 35 מ"מ.
- הסרה לא מורשית של הדיור הנדרש, שימוש לא הולם, התקנה או תפעול שגויים יוצרים סיכון לפציעה של כוח אדם או נזק לציוד. למידע מפורט יותר אנא עיין במדריך למשתמש.
- אל תחבר את המודול לרשת באמצעות שנאי אוטומטי.
- כל הפעולות הנוגעות להובלה, התקנה והפעלה וכן תחזוקה חייבות להתבצע על ידי צוות מוסמך ומיומן ויש להקפיד על תקנות לאומיות למניעת תאונות.
- על פי מידע בטיחות בסיסי זה, כוח אדם מוסמך ומיומן הוא אנשים שמכירים את ההתקנה, ההרכבה, ההפעלה וההפעלה של המוצר ובעלי כישורים הדרושים לעיסוקם.
- שקע RS-232 משמש רק לחיבור התקנים (איור 5) הפועלים עם פרוטוקול MODBUS. הנח תקע חור בשקע מודול RS-232 אם השקע אינו בשימוש.
2. הובלה, אחסנה
- אנא שימו לב להערות על הובלה, אחסון וטיפול מתאים.
- שים לב לתנאי האקלים המפורטים במפרטים.
3. התקנה
- יש להתקין את המודול בהתאם לתקנה ולהוראות המפורטות במדריך למשתמש זה.
- הקפידו על טיפול נכון והימנעו מלחץ מכני.
- אין לכופף רכיבים ואל לשנות את מרחקי הבידוד.
- אין לגעת ברכיבים ובמגעים אלקטרוניים.
- מכשירים עשויים להכיל רכיבים רגישים מבחינה אלקטרוסטטית, שעלולים להינזק בקלות על ידי טיפול לא הולם.
- אין להזיק או להרוס רכיבים חשמליים כלשהם שכן הדבר עלול לסכן את בריאותכם!
4. חיבור לחשמל
 לפני הפעלת המכשיר, יש לבדוק את תקינות החיבור לרשת.
לפני הפעלת המכשיר, יש לבדוק את תקינות החיבור לרשת.- במקרה של חיבור מסוף ההגנה עם כבל נפרד יש לזכור לחבר אותו לפני חיבור המכשיר לרשת החשמל.
- כאשר עובדים על מכשירים חיים, יש להקפיד על התקנות הלאומיות החלות למניעת תאונות.
- התקנת החשמל חייבת להתבצע על פי התקנות המתאימות (חתכי כבלים, נתיכים, חיבור PE). מידע נוסף ניתן לקבל מהמדריך למשתמש.
- התיעוד מכיל מידע על התקנה בהתאם ל-EMC (סיכוך, הארקה, מסננים וכבלים). יש להקפיד על הערות אלו לגבי כל המוצרים עם סימון CE.
- היצרן של מערכת המדידה או המכשירים המותקנים אחראי לעמידה בערכי הגבול הנדרשים לפי חקיקת ה-EMC.
5. תפעול
- מערכות מדידה כולל מודולי SM3, חייבות להיות מצוידות בהתקני הגנה על פי התקן והתקנות המקבילות למניעת תאונות.
- לאחר ניתוק המכשיר מהאספקה כרךtagה, אסור לגעת מיד ברכיבים חיים ובחיבורי חשמל מכיוון שניתן לטעון קבלים.
- הדיור חייב להיות סגור במהלך הפעולה.
6. תחזוקה ושירות
- אנא עיין בתיעוד של היצרן.
- קרא את כל הערות הבטיחות והיישום הספציפיות למוצר במדריך למשתמש זה.
- לפני הוצאת בית המכשיר החוצה, יש לכבות את האספקה.
![]() הסרת בית המכשיר במהלך תקופת חוזה הערבות עלולה לגרום לביטולו.
הסרת בית המכשיר במהלך תקופת חוזה הערבות עלולה לגרום לביטולו.
הַתקָנָה
4.1. תיקון מודול
המודול מיועד לקיבוע על מסילה של 35 מ"מ (EN 60715). בית המודול עשוי מפלסטיק מכבה עצמי.
מידות כוללות של הדיור: 22.5 על 120 על 100 מ"מ. יש לחבר חוטים חיצוניים בחתך של 2.5 מ"מ (מצד האספקה) ושל 1.5 מ"מ (מצד אות הכניסה). 4.2. תיאור המסוף
4.2. תיאור המסוף
יש לחבר את האותות האספקה והחיצוניים בהתאם לתמונה. 3, 4 ו-5. נקודות פתיחה פרטיות מתוארות בטבלה 1.
פֶּתֶק: יש לשים לב במיוחד לחיבור נכון של אותות חיצוניים (ראה טבלה 1).
 יש שלוש דיודות על הלוח הקדמי:
יש שלוש דיודות על הלוח הקדמי:
- ירוק - בעת תאורה, מסמן את האספקה פועלת,
- ירוק (RxD) - מסמן את קליטת הנתונים על ידי המודול,
- צהוב (TxD) - מסמן את העברת הנתונים על ידי המודול.
תיאור של יציאות מודול SM3
טבלה 1
|
מָסוֹףnr |
תיאור מסוף |
| 1 | קו GND של כניסות לוגיות |
| 2 | קו IN1 - קלט לוגי מס' 1 |
| 3 | קו 5 V dc |
| 4 | קו IN2 - קלט לוגי מס' 2 |
| 5 | קו GND של ממשק RS-485 |
| 6, 7 | קווים המספקים את המודול |
| 8 | קו של ממשק RS-485 עם בידוד אופטו |
| 9 | קו B של ממשק RS-485 עם בידוד אופטו |
דרך דוגמה לחיבורי קלט לוגיים מוצגת להלן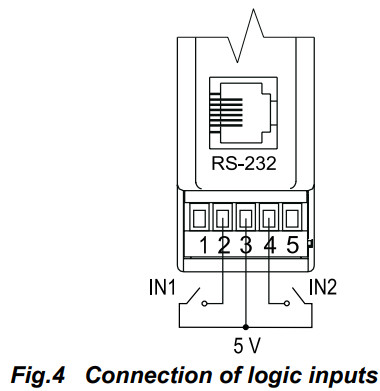
 פֶּתֶק:
פֶּתֶק:
בהתחשב בהפרעות אלקטרומגנטיות, יש להשתמש בחוטים ממוגנים כדי לחבר אותות כניסה לוגיים ואותות ממשק RS-485. המגן חייב להיות מחובר למסוף המגן בנקודה אחת. האספקה חייבת להיות מחוברת באמצעות כבל דו-חוטי בקוטר חוט מתאים, מה שמבטיח את הגנתו באמצעות ניתוק התקנה.
שֵׁרוּת
לאחר חיבור אותות חיצוניים והחלפת האספקה, מודול SM3 מוכן לעבודה. הדיודה הירוקה הדולקת מסמנת את פעולת המודול. הדיודה הירוקה (RxD) מאותתת על בדיקת המודול, אולם הדיודה הצהובה (TxD), התשובה של המודול. דיודות צריכות להאיר באופן מחזורי במהלך העברת הנתונים, הן דרך ממשק RS-232 והן RS-485. האות "+" (מסוף 3) הוא פלט 5V עם העומס המותר של 50 mA. אפשר להשתמש בו לאספקת מעגלים חיצוניים.
ניתן לתכנת את כל הפרמטרים של המודול באמצעות RS-232 או RS-485. ליציאת RS-232 יש פרמטרי שידור קבועים בהתאם לנתונים טכניים, מה שמאפשר את החיבור עם המודול, גם כאשר הפרמטרים המתוכנתים של הפלט הדיגיטלי RS-485 אינם ידועים (כתובת, מצב, קצב).
תקן RS-485 מאפשר חיבור ישיר ל-32 מכשירים בקישור טורי בודד באורך 1200 מ'. כדי לחבר מספר גבוה יותר של התקנים יש צורך להשתמש בהתקנים נוספים מפרידי ביניים (למשל ממיר/מחזר PD51). אופן חיבור הממשק ניתן במדריך למשתמש של המודול (איור 5). כדי להשיג שידור נכון יש צורך לחבר קווים A ו-B במקביל למקבילים שלהם במכשירים אחרים. החיבור צריך להתבצע על ידי חוט מוגן. המגן חייב להיות מחובר למסוף המגן בנקודה אחת. קו GND משמש להגנה נוספת על קו הממשק בחיבורים ארוכים. יש לחבר אותו למסוף המגן (שאין צורך לפעולת הממשק הנכונה).
כדי להשיג את החיבור למחשב ה-PC דרך יציאת RS-485, יש צורך בממיר ממשק RS-232/RS-485 (למשל ממיר PD51) או כרטיס RS-485. סימון קווי התמסורת עבור הכרטיס במחשב ה-PC תלוי ביצר הכרטיס. כדי לממש את החיבור דרך יציאת RS-232, מספיק הכבל שנוסף למודול. אופן חיבור שני היציאות (RS-232 ו-RS-485) מוצג באיור 5.
ניתן לחבר את המודול להתקן המאסטר רק דרך יציאת ממשק אחת. במקרה של חיבור בו-זמנית של שתי היציאות, המודול יפעל כהלכה עם יציאת RS-232.
5.1. תיאור של יישום פרוטוקול MODBUS
פרוטוקול השידור מתאר דרכים לחילופי מידע בין מכשירים באמצעות הממשק הטורי.
פרוטוקול MODBUS יושם במודול בהתאם למפרט PI-MBUS-300 Rev G של חברת Modicon.
סט פרמטרים של ממשק טורי של מודולים בפרוטוקול MODBUS:
– כתובת המודול: 1…247
- קצב שידור: 2400, 4800, 19200, 38400 סיביות לשנייה
– מצב הפעלה: ASCII, RTU
- יחידת מידע: ASCII: 8N1, 7E1, 7O1,
RTU: 8N2, 8E1, 8O1, 8N1
- זמן תגובה מקסימלי: 300 אלפיות השנייה
תצורת הפרמטרים של הממשק הטורי מתוארת בחלק נוסף של מדריך למשתמש זה. היא מורכבת מהתיישבות של קצב הביאוד (פרמטר קצב), כתובת המכשיר (פרמטר כתובת) וסוג יחידת המידע (פרמטר מצב).
במקרה של חיבור המודול למחשב באמצעות כבל RS-232, המודול מגדיר באופן אוטומטי פרמטרים של שידור על ערכים:
קצב שידור: 9600 b/s
מצב הפעלה: RTU 8N1
כְּתוֹבֶת: 1
פֶּתֶק: כל מודול המחובר לרשת התקשורת חייב:
- יש כתובת ייחודית, שונה מכתובות של מכשירים אחרים המחוברים ברשת,
- בעלי קצב העברת מידע וסוג יחידת מידע זהים,
- שידור הפקודה עם הכתובת "0" מזוהה כמצב שידור (שידור למכשירים רבים).
5.2. תיאור פונקציות פרוטוקול MODBUS
פונקציות פרוטוקול MODBUS הבאות יושמו במודול SM3:
תיאור פונקציות פרוטוקול MODBUS
טבלה 2
| קוד |
מַשְׁמָעוּת |
| 03 (03 שעות) | קריאה של n-registers |
| 04 (04 שעות) | קריאה של אוגרי n-קלט |
| 06 (06 שעות) | כתוב של פנקס בודד |
| 16 (10 שעות) | כתיבה של n-registers |
| 17 (11 שעות) | זיהוי מכשיר עבד |
קריאה של n-registers (קוד 03h)
פונקציה לא נגישה במצב שידור נתונים.
Exampעל: קריאה של 2 אוגרים המתחילים מהאוגר עם הכתובת 1DBDh (7613):
בַּקָשָׁה:
| כתובת המכשיר | פוּנקצִיָה | לִרְשׁוֹם כתובת היי |
לִרְשׁוֹם כתובת Lo |
מספר של רושם היי |
מספר של רושם לו |
סכום בדיקה CRC |
| 01 | 03 | 1D | BD | 00 | 02 | 52 43 |
תְגוּבָה:
| כתובת המכשיר | פוּנקצִיָה | מספר בתים | ערך מהמרשם 1DBD (7613) | ערך מהמרשם 1DBE (7614) | Checksum CRC | ||||||
| 01 | 03 | 08 | 3F | 80 | 00 | 00 | 40 | 00 | 00 | 00 | 42 8B |
קריאה של אוגרי n-קלט (קוד 04h)
פונקציה לא נגישה במצב שידור נתונים.
Exampעל: קריאה של אוגר אחד עם הכתובת 0FA3h (4003) החל מהאוגר עם 1DBDh (7613).
בַּקָשָׁה:
| כתובת המכשיר | פוּנקצִיָה | לִרְשׁוֹם כתובת היי |
לִרְשׁוֹם כתובת Lo |
מספר של רושם היי |
מספר של רושם לו |
סכום בדיקה CRC |
| 01 | 04 | 0F | A3 | 00 | 01 | C2 FC |
תְגוּבָה:
| כתובת המכשיר | פוּנקצִיָה | מספר בתים | ערך מה הרשמה 0FA3 (4003) |
Checksum CRC | |
| 01 | 04 | 02 | 00 | 01 | 78 F0 |
כתוב את הערך לתוך האוגר (קוד 06h)
הפונקציה נגישה במצב שידור.
Exampעל: כתוב את הפנקס עם כתובת 1DBDh (7613).
בַּקָשָׁה:
| כתובת המכשיר | פוּנקצִיָה | כתובת הרשמה היי | כתובת רישום Lo | ערך מהמרשם 1DBD (7613) | Checksum CRC | |||
| 01 | 06 | 1D | BD | 3F | 80 | 00 | 00 | 85 לספירה |
תְגוּבָה:
| כתובת המכשיר | פוּנקצִיָה | לִרְשׁוֹם כתובת היי |
כתובת רישום Lo |
ערך מהמרשם 1DBD (7613) | Checksum CRC | |||
| 01 | 06 | 1D | BD | 3F | 80 | 00 | 00 | 85 לספירה |
כתוב ל-n-registers (קוד 10h)
הפונקציה נגישה במצב שידור.
Exampעל: כתוב 2 אוגרים שמתחילים מהרישום עם מודעה 1DBDh (7613)
בַּקָשָׁה:
| הֶתקֵן כְּתוֹבֶת |
פוּנקצִיָה | לִרְשׁוֹם כְּתוֹבֶת |
מספר של רושמת |
מספר בתים | ערך מהמרשם 1DBD (7613) |
ערך מה הרשמה 1DBE (7614) |
לִבדוֹק- סכום CRC |
||||||||
| Hi | Lo | Hi | Lo | ||||||||||||
| 01 | 10 | 1D | BD | 00 | 02 | 08 | 3F | 80 | 00 | 00 | 40 | 00 | 00 | 00 | 03 09 |
תְגוּבָה:
| כתובת המכשיר | פוּנקצִיָה | לִרְשׁוֹם כתובת היי |
לִרְשׁוֹם כתובת Lo |
מספר של רושם היי |
מספר של רושם לו |
סכום בדיקה (CRC) |
| 01 | 10 | 1D | BD | 00 | 02 | D7 80 |
דיווח על זיהוי המכשיר (קוד 11h)
בַּקָשָׁה:
| כתובת המכשיר | פוּנקצִיָה | Checksum (CRC) |
| 01 | 11 | C0 2C |
תְגוּבָה:
| כתובת המכשיר | פוּנקצִיָה | מספר בתים | מזהה מכשיר | מצב המכשיר | מספר גרסת תוכנה | סכום בדיקה |
| 01 | 11 | 06 | 8C | FF | 3F 80 00 00 | A6 F3 |
כתובת המכשיר – 01
פונקציה - מספר פונקציה: 0x11;
מספר בתים - 0x06
מזהה מכשיר - 0x8B
מצב מכשיר - 0xFF
גירסת תוכנה מס' – גרסה המיושמת במודול: 1.00
XXXX - משתנה של 4 בתים מסוג צף
Checksum – 2 בתים במקרה של עבודה במצב RTU
– 1 בייט במקרה של עבודה במצב ASCII
5.3. מפה של אוגרי מודול
מפת רישום של מודול SM3
| כתובת לָנוּעַ | עֵרֶך סוּג | תֵאוּר |
| 4000-4100 | int, float (16 סיביות) | הערך ממוקם באוגרים של 16 סיביות. הרשמות מיועדות לקריאה בלבד. |
| 4200-4300 | int (16 סיביות) | הערך ממוקם באוגרים של 16 סיביות. תוכן האוגר תואם לתוכן האוגר של 32 סיביות מאזור 7600. ניתן לקרוא ולכתוב את הרשמים. |
| 7500-7600 | לצוף (32 סיביות) | הערך ממוקם באוגר 32 סיביות. הרשמות מיועדות לקריאה בלבד. |
| 7600-7700 | לצוף (32 סיביות) | הערך ממוקם באוגר 32 סיביות. ניתן לקרוא ולכתוב את הרשמים. |
5.4. סט אוגרי מודול
סט אוגרים לקריאת מודול SM3.
| הערך ממוקם באוגרים של 16 סיביות | שֵׁם | לָנוּעַ | סוג הרשמה | שם כמות |
| 4000 | מזהה | – | int | זיהוי מתמיד של המכשיר (0x8B) |
|
4001 |
סטטוס 1 |
int |
Status1 הוא האוגר המתאר מצבים נוכחיים של כניסות לוגיות | |
| 4002 | סטטוס 2 | – | int | Status2 הוא האוגר המתאר את פרמטרי השידור הנוכחיים. |
| 4003 | W1 | 0… 1 | int | ערך מצב הקריאה של הקלט 1 |
| 4004 | W2 | 0… 1 | int | ערך מצב הקריאה של הקלט 2 |
| 4005 | WMG1_H |
– |
אָרוֹך |
תוצאה המתקבלת באמצעות ביצוע פעולת החלוקה של המונה הראשי וערך המשקל, עבור קלט 1 (האוגר סופר את מספר המיליונים של התוצאה כולה) - מילה גבוהה יותר. |
| 4006 | WMG1_L | תוצאה המתקבלת באמצעות ביצוע פעולת החלוקה של המונה הראשי וערך המשקל, עבור קלט 1 (האוגר סופר את מספר המיליונים של התוצאה כולה) – מילה נמוכה יותר. | ||
| 4007 | WMP1_H |
– |
אָרוֹך |
תוצאה המתקבלת באמצעות ביצוע פעולת החלוקה של המונה הראשי וערך המשקל, עבור קלט 1 (האוגר סופר את מספר המיליונים של התוצאה כולה) - מילה גבוהה יותר. |
| 4008 | WMP1_L | תוצאה המתקבלת באמצעות ביצוע פעולת החלוקה של המונה הראשי וערך המשקל, עבור קלט 1 (האוגר סופר את מספר המיליונים של התוצאה כולה) – מילה נמוכה יותר. | ||
| 4009 | WMG2_H |
– |
אָרוֹך |
תוצאה המתקבלת באמצעות ביצוע פעולת החלוקה של המונה הראשי וערך המשקל, עבור קלט 2 (האוגר סופר את מספר המיליונים של התוצאה כולה) - מילה גבוהה יותר. |
| 4010 | WMG2_L | תוצאה המתקבלת באמצעות ביצוע פעולת החלוקה של המונה הראשי וערך המשקל, עבור קלט 2 (האוגר סופר את מספר המיליונים של התוצאה כולה) – מילה נמוכה יותר. |
| 4011 | WMP2_H |
– |
אָרוֹך |
תוצאה המתקבלת באמצעות ביצוע פעולת החלוקה של המונה הראשי וערך המשקל, עבור קלט 2 (האוגר סופר את מספר המיליונים של התוצאה כולה) - מילה גבוהה יותר. |
| 4012 | WMP2_L | תוצאה המתקבלת באמצעות ביצוע פעולת החלוקה של המונה הראשי וערך המשקל, עבור קלט 2 (האוגר סופר את מספר המיליונים של התוצאה כולה) – מילה נמוכה יותר. | ||
| 4013 | WG1_H | 0… 999999 | לָצוּף | תוצאה המתקבלת באמצעות ביצוע פעולת החלוקה של המונה הראשי וערך המשקל, עבור קלט 1 (האוגר סופר את מספר המיליונים של התוצאה כולה) - מילה גבוהה יותר. |
| 4014 | WG1_L | תוצאה המתקבלת באמצעות ביצוע פעולת החלוקה של המונה הראשי וערך המשקל, עבור קלט 1 (האוגר סופר את מספר המיליונים של התוצאה כולה) – מילה נמוכה יותר. | ||
| 4015 | WP1_H | 0… 999999 | לָצוּף | תוצאה המתקבלת באמצעות ביצוע פעולת החלוקה של המונה הראשי וערך המשקל, עבור קלט 1 (האוגר סופר את מספר המיליונים של התוצאה כולה) - מילה גבוהה יותר. |
| 4016 | WP1_L | תוצאה המתקבלת באמצעות ביצוע פעולת החלוקה של המונה הראשי וערך המשקל, עבור קלט 1 (האוגר סופר את מספר המיליונים של התוצאה כולה) – מילה נמוכה יותר. | ||
| 4017 | WG2_H | 0… 999999 | לָצוּף | תוצאה המתקבלת באמצעות ביצוע פעולת החלוקה של המונה הראשי וערך המשקל, עבור קלט 2 (האוגר סופר את מספר המיליונים של התוצאה כולה) - מילה גבוהה יותר. |
| 4018 | WG2_L | תוצאה המתקבלת באמצעות ביצוע פעולת החלוקה של המונה הראשי וערך המשקל, עבור קלט 2 (האוגר סופר את מספר המיליונים של התוצאה כולה) – מילה נמוכה יותר. | ||
| 4019 | WP2_H | 0… 999999 | לָצוּף | תוצאה המתקבלת באמצעות ביצוע פעולת החלוקה של המונה הראשי וערך המשקל, עבור קלט 2 (האוגר סופר את מספר המיליונים של התוצאה כולה) - מילה גבוהה יותר. |
| 4020 | WP2_L | תוצאה המתקבלת באמצעות ביצוע פעולת החלוקה של המונה הראשי וערך המשקל, עבור קלט 2 (האוגר סופר את מספר המיליונים של התוצאה כולה) – מילה נמוכה יותר. |
| 4021 | LG1_H | 0... (2 32 - 1) | אָרוֹך | ערך מונה הדחפים הראשי עבור הקלט 1 (מילה גבוהה יותר) |
| 4022 | LG1_L | ערך מונה הדחפים הראשי עבור קלט 1 (מילה נמוכה יותר) | ||
| 4023 | LP1_H | 0... (2 32 - 1) | אָרוֹך | ערך מונה הדחפים הראשי עבור הקלט 1 (מילה גבוהה יותר) |
| 4024 | LP1_L | ערך מונה הדחפים הראשי עבור קלט 1 (מילה נמוכה יותר) | ||
| 4025 | LG2_H | 0... (2 32 - 1) | אָרוֹך | ערך מונה הדחפים הראשי עבור הקלט 2 (מילה גבוהה יותר) |
| 4026 | LG2_L | ערך מונה הדחפים הראשי עבור קלט 2 (מילה נמוכה יותר) | ||
| 4027 | LP2_H | 0... (2 32 - 1) | אָרוֹך | ערך מונה דחפי העזר עבור קלט 2 (מילה גבוהה יותר) |
| 4028 | LP2_L | ערך מונה דחפי העזר עבור קלט 2 (מילה תחתונה) | ||
| 4029 | סטטוס3 | – | int | מצב שגיאה של המכשיר |
| 4030 | אִתחוּל | 0... (2 16 - 1) | int | מונה של מספר דעיכת אספקת המכשיר |
סט אוגרים לקריאת מודול SM3 (כתובות 75xx)
| שֵׁם | לָנוּעַ | סוג הרשמה | שם כמות | |
| הערך i רושם | ||||
| 7500 | מזהה | – | לָצוּף | זיהוי מתמיד של המכשיר (0x8B) |
| 7501 | סטטוס 1 | – | לָצוּף | המצב 1 הוא האוגר המתאר את מצבי הקלט הלוגיים הנוכחיים |
| 7502 | סטטוס 2 | – | לָצוּף | המצב 2 הוא האוגר המתאר את פרמטרי השידור הנוכחיים |
| 7503 | W1 | 0… 1 | לָצוּף | ערך מצב הקריאה של הקלט 1 |
| 7504 | W2 | 0… 1 | לָצוּף | ערך מצב הקריאה של הקלט 2 |
| 7505 | WG1 | 0... (2 16 - 1) | לָצוּף | תוצאה שהושגה באמצעות ביצוע פעולת החלוקה של המונה הראשי וערך המשקל, עבור קלט 1 |
| 7506 | WP1 | – | לָצוּף | תוצאה שהושגה באמצעות ביצוע פעולת החלוקה של מונה העזר וערך המשקל, עבור קלט 1 |
| 7507 | WG2 | – | לָצוּף | תוצאה שהושגה באמצעות ביצוע פעולת החלוקה של המונה הראשי וערך המשקל, עבור קלט 2 |
| 7508 | WP2 | – | לָצוּף | תוצאה שהושגה באמצעות ביצוע פעולת החלוקה של מונה העזר וערך המשקל, עבור קלט 2 |
| 7509 | LG1 | 0... (2 32 - 1) | לָצוּף | ערך מונה הדחפים הראשי עבור קלט 1 |
| 7510 | LP1 | 0... (2 32 - 1) | לָצוּף | ערך מונה דחפי העזר עבור קלט 1 |
| 7511 | LP2 | 0... (2 32 - 1) | לָצוּף | ערך מונה הדחפים הראשי עבור קלט 2 |
| 7512 | LP2 | 0... (2 32 - 1) | לָצוּף | ערך מונה דחפי העזר עבור קלט 2 |
| 7513 | סטטוס3 | לָצוּף | מצב שגיאות במכשיר | |
| 7514 | אִתחוּל | 0... (2 16 - 1) | לָצוּף | מונה של מספר דעיכת אספקת המכשיר |
תיאור מרשם המצבים 1
 Bit-15…2 לא בשימוש מצב 0
Bit-15…2 לא בשימוש מצב 0
מצב Bit-1 של קלט IN2
0 - מצב פתוח או לא פעיל,
1 - מצב קצר חשמלי או פעיל
מצב Bit-0 של קלט IN1
0 - מצב פתוח או לא פעיל,
1 - מצב קצר חשמלי או פעיל
תיאור מרשם המצבים 2 Bit-15…6 לא בשימוש מצב 0
Bit-15…6 לא בשימוש מצב 0
Bit-5…3 מצב הפעלה ויחידת מידע
000 - הממשק כבוי
001 – 8N1 – ASCII
010 – 7E1 – ASCII
011 – 7O1 – ASCII
100 – 8N2 – RTU
101 – 8E1 – RTU
110 – 8O1 – RTU
111 – 8N1 – RTU
קצב ה-Bud bit-2…0
000 - 2400 סיביות לשנייה
001 - 4800 סיביות לשנייה
010 - 9600 סיביות לשנייה
011 - 19200 סיביות לשנייה
100 - 38400 סיביות לשנייה
תיאור מרשם המצבים 3 שגיאת זיכרון של Bit-1…0 FRAM - מונה ראשי 1
שגיאת זיכרון של Bit-1…0 FRAM - מונה ראשי 1
00 - חוסר שגיאה
01 - שגיאת כתיבה/קריאה ממרחב הזיכרון 1
10 - שגיאה של כתיבה/קריאה מרווחי זיכרון 1 ו-2
11 - שגיאת כתיבה/קריאה של כל גושי הזיכרון (איבוד ערך המונה)
שגיאת זיכרון Bit-5…4 FRAM - מונה עזר 1
00 - חוסר שגיאה
01 - שגיאה של כתיבה/קריאה ממרחב הזיכרון הראשון
10 - שגיאה של כתיבה/קריאה מרווחי הזיכרון ה-1 וה-2
11 - שגיאת כתיבה/קריאה של כל גושי הזיכרון (איבוד ערך המונה)
שגיאת זיכרון של Bit-9…8 FRAM - מונה ראשי 2
00 - חוסר שגיאה
01 - שגיאה של כתיבה/קריאה ממרחב הזיכרון הראשון
10 - שגיאת כתיבה/קריאה מרווחי הזיכרון ה-1 וה-2 1 ו-2
11 - שגיאת כתיבה/קריאה של כל גושי הזיכרון (איבוד ערך המונה)
שגיאת זיכרון Bit-13…12 FRAM - מונה עזר 2
00 - חוסר שגיאה
01 - שגיאה של כתיבה/קריאה ממרחב הזיכרון הראשון
10 - שגיאה של כתיבה/קריאה מרווחי זיכרון 1 ו-2
11 - שגיאת כתיבה/קריאה של כל גושי הזיכרון (איבוד ערך המונה)
Bit-15…6, 3…2, 7…6, 11…10, 15…14 ללא שימוש מצב 0
סט אוגרים לקריאה ולכתיבה של מודול SM3 (כתובות 76xx)
טבלה 6
| הערך של סוג צף ממוקם באוגרים של 32 סיביות. | הערך של int type ממוקם באוגרים של 16 סיביות. | לָנוּעַ | שֵׁם | שם כמות |
| 7600 | 4200 | – | מזהה | מזהה (0x8B) |
| 7601 | 4201 | 0… 4 | שיעור באוד | קצב ה-baud של ממשק RS 0 – 2400 b/s 1 – 4800 b/s 2 – 9600 b/s 3 – 19200 b/s 4 – 38400 b/s |
| 7602 | 4202 | 0… 7 | מצב | מצב עבודה של ממשק RS 0 - הממשק כבוי 1 – ASCII 8N1 2 – ASCII 7E1 3 - ASCII 7O1 4 – RTU 8N2 5 – RTU 8E1 ? 6 – RTU 8O1 7 – RTU 8N1 |
| 7603 | 4203 | 0… 247 | כְּתוֹבֶת | כתובת המכשיר באוטובוס Modbus |
| 7604 | 4204 | 0… 1 | לִפְנוֹת | קבלת שינויים לרשמות 7601-7603 0 - חוסר קבלה 1 – קבלת שינויים |
| 7605 | 4205 | 0… 1 | מצב עבודה | מצב עבודה של המכשיר: 0 – קלט לוגי 1 - כניסות מונה |
| 7606 | 4206 | 0… 11 | הוֹרָאָה | רישום הוראות: 1 - מחיקת מונה העזר לכניסה 1 2 - מחיקת מונה העזר לכניסה 2 3 - מחיקת המונה הראשי עבור קלט 1 (רק עם RS-232) 4 - מחיקת המונה הראשי עבור קלט 2 (רק עם RS-232) 5 – מחיקת מונים עזר 6 - מחיקת מונים ראשיים (רק עם RS232) 7 - כתיבה של נתוני ברירת מחדל לרגיסטרים 7605 - 7613 ו-4205 – 4211 (רק עם RS232) 8 – כתיבה של נתוני ברירת מחדל לרגיסטרים 7601 – 7613 ו-4201 – 4211 (רק עם RS232) 9 – איפוס מכשיר 10 - מחיקת אוגרי מצב שגיאה 11 - מחיקת אוגרי מספר איפוס |
| 7607 | 4207 | 0… 3 | מצב פעיל | מצב פעיל עבור כניסות המכשיר: 0x00 - מצב פעיל "0" עבור IN1, מצב פעיל "0" עבור IN2 0x01 - מצב פעיל "1" עבור IN1, מצב פעיל "0" עבור IN2 0x02 - מצב פעיל "0" עבור IN1, מצב פעיל "1" עבור IN2 0x03 - מצב פעיל "1" עבור IN1, מצב פעיל "1" עבור IN2 |
| 7608 | 4208 | 1…10000 | הגיע הזמן לרמה 1 הפעילה | משך הרמה הגבוהה עבור דחף 1 עבור הקלט 1 - (0.5 - 500 אלפיות השנייה) |
| 7609 | 4209 | 1…100000 | הגיע הזמן לשלב הלא פעיל 1 | משך הרמה הנמוכה עבור דחף 1 עבור הקלט 1 - (0.5 - 500 אלפיות השנייה) |
| 7610 | 4210 | 1…10000 | הגיע הזמן לרמה 2 הפעילה | משך הרמה הגבוהה עבור דחף 1 עבור הקלט 2 - (0.5 - 500 אלפיות השנייה) |
| 7611 | 4211 | 1…10000 | הגיע הזמן לשלב הלא פעיל 2 | משך הרמה הנמוכה עבור דחף 1 עבור הקלט 2 - (0.5 - 500 אלפיות השנייה) |
| 7612 | 0.005…1000000 | משקל 1 | ערך המשקל עבור הקלט 1 | |
| 7613 | 0.005…1000000 | משקל 2 | ערך המשקל עבור הקלט 2 | |
| 7614 | 4212 | – | קוד | קוד הפעלת שינויים ברישומים 7605 – 7613 (4206 – 4211), קוד – 112 |
מוני אימפולס
כל אחת מכניסות הדחף של הממיר מצוידת בשני מונים עצמאיים של 32 סיביות - מוני דחפים ראשיים ועזרי. המצב המרבי של מונים הוא 4.294.967.295 (2?? – 1) דחפים.
הגדלת המונים באחד באה בו-זמנית ברגע של זיהוי מצב פעיל של משך זמן ארוך מתאים על קלט הדחף ומצב מנוגד למצב הפעיל של משך זמן ארוך מתאים.
6.1. דלפק ראשי
ניתן לקרוא את המונה הראשי באמצעות קישור התכנות RJ או ממשק RS485, אך למחוק רק באמצעות קישור התכנות באמצעות כתיבת הערך המתאים לאוגר הפקודות (ראה טבלה 6). במהלך הקריאה, התוכן של המילה הישנה והצעירה יותר של האוגר המונה מאוחסן ואינו משתנה עד לסוף חילופי מסגרות הנתונים. מנגנון זה מבטיח קריאה בטוחה הן של כל אוגר 32 סיביות והן של חלק 16 סיביות שלו.
התרחשות הצפת המונה הראשית אינה גורמת לעצירה של ספירת הדחפים.
מצב המונה נכתב בזיכרון הלא נדיף.
כמו כן נכתב סכום הבדיקה CRC, המחושב מתוכן המונה.
לאחר החלפת האספקה, הממיר משחזר את מצב המונה מנתונים כתובים ובודק את סכום ה-CRC. במקרה של סתירה במאגר השגיאות, נקבע סימון שגיאה מתאים (ראה תיאור סטטוס 3).
הרשמים של המונים הראשיים נמצאים תחת הכתובות 4021 -4022 עבור קלט 1 ו-4025 - 4026 עבור קלט 2.
6.2. מונה עזר
מונה העזר ממלא את תפקיד המונה של המשתמש, אותו ניתן למחוק בכל עת, הן על ידי קישור התכנות RJ והן מרמת האפליקציה על ידי ממשק RS-485.
זה מתבצע על ידי כתיבה של ערך מתאים לפנקס ההוראות (ראה טבלה 6).
מנגנון הקריאה דומה לזה המתואר, במקרה של המונה הראשי.
מונה העזר מאופס אוטומטית לאחר הצפתו.
אגיסטרים של מונים עזר ממוקמים תחת הכתובות 4023 - 4024 עבור קלט 1 ו-4027 - 4028 עבור קלט 2.
תצורה של כניסות IMPULSE
התצורה של פרמטרי התקן שנמצאים באוגרים 7606 - 7613 (4206 - 4211) אפשרית לאחר כתיבה קודמת של הערך 112 לאוגר 7614 (4212).
הכתיבה של הערך 1 לאוגר 7605 (4205) גורמת להפעלה של כניסות דחף וכל פונקציות התצורה הקשורות למצב העבודה הפעיל. עבור כל אחד מכניסות הדחף ניתן לתכנת את הפרמטרים הבאים: voltagרמה e על הקלט עבור המצב הפעיל ומשך הזמן המינימלי של מצב זה והמצב ההפוך למצב הפעיל. בנוסף, ניתן להקצות ערכים של משקל הדחף לכל קלט.
7.1 מצב פעיל
ההגדרה האפשרית של המצב הפעיל היא הקצר (מצב גבוה בכניסה) או הכניסה פתוחה (מצב נמוך בכניסה). ההגדרה עבור שתי הכניסות נמצאת ברישומים של 7607, 4007 כתובות ולערך שלה יש את המשמעות הבאה:
מצבים פעילים של כניסות
טבלה 7.
| לִרְשׁוֹם עֵרֶך | מצב פעיל עבור קלט 2 | מצב פעיל עבור קלט 1 |
| 0 | מצב נמוך | מצב נמוך |
| 1 | מצב נמוך | מצב גבוה |
| 2 | מצב גבוה | מצב נמוך |
| 3 | מצב גבוה | מצב גבוה |
מצב כניסות הדחף, תוך התחשבות בתצורה באמצעות האוגר 7607 (4007), נגיש במאגר המצב של הממיר או באוגרים 7503, 7504 או 4003, 4004.
7.2. משך מצב פעיל
ההגדרה של משך המצב הפעיל המינימלי בכניסה מאפשרת סינון של הפרעות שיכולות להופיע בקווי איתות וספירת דחפים בעלי משך הזמן המתאים בלבד. משך הזמן המינימלי של המצב הפעיל נקבע בטווח שבין 0.5 ל-500 מילישניות באוגרים עם הכתובת 7608 (מצב פעיל), 7609 (מצב הפוך) עבור קלט 1 ועם הכתובת 7610 (מצב פעיל), 7611 (מנוגד מצב) עבור קלט 2.
דחפים קצרים יותר מהערך שנקבע ברגיסטרים לא ייספרו.
כניסות הדחף הן sampמוביל במרווחים של 0.5 מילישניות.
7.3. משקל קלט
למשתמש יש אפשרות להגדיר את הערך של משקל הדחף (אוגרים
7612, 7613). התוצאה נקבעת בדרך הבאה:
ResultMeasurement_Y = CounterValue_X/WeightValue_X
ResultMeasurement_Y – תוצאת מדידה עבור הקלט המתאים והמונה הנבחר
CounterValue_X - ערך המונה של הקלט המתאים והמונה הנבחר CounterWeight_X
– ערך משקל עבור הקלט המתאים.
הערך שנקבע הופך לנגיש באוגרים של 16 סיביות בטווח 4005-4012, לפי טבלה 4 ובאוגרים בודדים מסוג float בטווח 7505 – 7508, לפי טבלה 5. הדרך לקביעת ערכים של הראשי תוצאת מונה עבור קלט 1 דרך הקריאה של אוגרים בטווח 4005 - 4012, מוצגת להלן.
ResultMeasurement_1 = 1000000* (long)(WMG1_H, WMG1_L) + (float)(WG1_H, WG1_L)
ResultMeasurement_1
- תוצאה תוך התחשבות במשקל עבור קלט 1 והמונה הראשי.
(long)(WMG1_H, WMG1_L) - מילה גבוהה יותר של התוצאה "ResultMeasurement_1"
משתנה מסוג float מורכב משני אוגרים של 16 סיביות: WMG1_H ו-WMG1_L.
(float)(WG1_H, WG1_L) - המילה התחתונה של התוצאה, "ResultMeasurement_1"
משתנה מסוג float מורכב משני אוגרים של 16 סיביות: WG1_H ו-WG1_L.
התוצאות שנותרו עבור קלט 2 ומונה עזר נקבעים באופן דומה כמו בדוגמה לעילample.
7.4. פרמטרי ברירת מחדל
המכשיר, לאחר ביצוע ההוראה 7 (ראה טבלה מס' 5), מוגדר על פרמטרי ברירת מחדל להלן:
- מצב עבודה - 0
- מצב מופעל - 3
- זמן לרמה הפעילה 1 - 5 אלפיות השנייה
- זמן לרמה הלא פעילה 1 - 5 אלפיות השנייה
- זמן לרמה הפעילה 2 - 5 אלפיות השנייה
- זמן לרמה הלא פעילה 2 - 5 אלפיות השנייה
- משקל 1-1
- משקל 2-1
לאחר ביצוע ההוראה 8 (ראה טבלה מס' 5), המכשיר מגדיר פרמטרי ברירת מחדל נוספים כמפורט להלן:
- קצב שידור RS – 9600 b/s
- מצב RS – 8N1
- כתובת - 1
נתונים טכניים
כניסות לוגיות: מקור אות – אות פוטנציאלי: – רמות לוגיות: 0 לוגיות: 0… 3 V
היגיון אחד: 1… 3,5 וולט
מקור אות - ללא אות פוטנציאלי:
– רמות לוגיקה: 0 לוגיקה – קלט פתוח
1 היגיון - קלט מקוצר
התנגדות לקצר של המגע ללא פוטנציאל ≤ 10 kΩ
התנגדות פתיחה של המגע ללא פוטנציאל ≥ 40 kΩ
פרמטרי מונה:
- זמן דחף מינימלי (למצב גבוה): 0.5 אלפיות השנייה
- זמן דחף מינימלי (למצב נמוך): 0.5 אלפיות השנייה
– תדר מקסימלי: 800 הרץ
נתוני שידור:
א) ממשק RS-485: פרוטוקול שידור: MODBUS
ASCII: 8N1, 7E1, 7O1
RTU: 8N2, 8E1, 8O1, 8N1 קצב הביאוד
2400, 4800, 9600, 19200, 38400: 57600, 115200 סיביות/שניות כתובת………. 1…247
ב) ממשק RS-232:
פרוטוקול שידור MODBUS RTU 8N1 קצב שידור 9600 כתובת 1
צריכת חשמל של מודול ≤ 1.5 A
תנאי פעולה מדורגים:
– אספקה כרךtage: 20…24…40 V ac/dc או או 85…230…253 V ac/dc
– אספקה כרךtagתדר e- 40…50/60…440 הרץ
– טמפרטורת סביבה- 0…23…55°C
- לחות יחסית - < 95% (עיבוי אסור)
– שדה מגנטי חיצוני- < 400 A/m
– עמדת עבודה- כל
תנאי אחסון וטיפול:
– טמפרטורת הסביבה – 20… 70 מעלות צלזיוס
- לחות יחסית < 95% (עיבוי בלתי קביל)
– רעידות סינוסואידיות קבילות: 10…150 הרץ
- תדירות:
– תזוזה ampאור 0.55 מ"מ
דרגות הגנה מובטחות:
- מהצד של הדיור הקדמי: IP 40
- מצד המסוף: IP 40
מידות כוללות: 22.5 על 120 על 100 מ"מ
משקל: < 0.25 ק"ג
דיור: מותאם להרכבה על מסילה
תאימות אלקטרומגנטית:
- חסינות רעש EN 61000-6-2
– פליטת רעש EN 61000-6-4
דרישות בטיחות לפי ל-EN EN 61010-1:
– קטגוריית התקנה III
- דרגת זיהום 2
מקסימום פאזה לאדמה כרךtage:
– למעגלי אספקה: 300 וולט
- למעגלים אחרים: 50 V
לפני שיוכרז על נזק
| סימפטומים | נוֹהָל | הערות |
| 1. הדיודה הירוקה של המודול לא נדלקת. | בדוק את החיבור של כבל הרשת. | |
| 2. המודול אינו יוצר תקשורת עם ההתקן הראשי דרך יציאת RS-232. | בדוק אם הכבל מחובר לשקע המתאים במודול. בדוק אם התקן המאסטר מוגדר על קצב הביאוד 9600, מצב 8N1, כתובת 1. |
(לRS-232 יש פרמטרים קבועים של שידור) |
| חוסר איתות שידור תקשורת ב-RxD ו | ||
| דיודות TxD. | ||
| 3. המודול אינו יוצר תקשורת עם ההתקן הראשי דרך יציאת RS-485. חוסר איתות שידור תקשורת על דיודות RxD ו-TxD. |
בדוק אם הכבל מחובר לשקע המתאים במודול. בדוק אם התקן הראשי מוגדר על אותם פרמטרי שידור כמו המודול (קצב שידור, מצב, כתובת) במקרה של צורך בשינוי פרמטרי שידור כאשר אין אפשרות ליצור תקשורת דרך RS-485, יש להשתמש ביציאת RS-232 בעלת פרמטרי שידור קבועים (במקרה של בעיות נוספות ראה סעיף 2). לאחר שינוי פרמטרים של RS-485 לנדרש, ניתן לעבור ליציאת RS-885. |
קודי הזמנה
טבלה 6 * מספר הקוד נקבע על ידי המפיק EXAMPLE OF ORDER
* מספר הקוד נקבע על ידי המפיק EXAMPLE OF ORDER
בעת ההזמנה, נא לכבד את מספרי הקוד העוקבים.
קוד: SM3 – 1 00 7 פירושו:
SM3 - מודול 2 ערוצים של כניסות בינאריות,
1 - אספקה כרךtage : 85…230…253 Va.c./dc
00 – גרסה רגילה.
7 – עם תעודת בדיקת איכות נוספת.
![]() LUMEL SA
LUMEL SA
ul. Słubicka 4, 65-127 Zielona Góra, פולין
טל': +48 68 45 75 100, פקס +48 68 45 75 508
www.lumel.com.pl
תמיכה טכנית:
טל.: (+48 68) 45 75 143, 45 75 141, 45 75 144, 45 75 140
אֶלֶקטרוֹנִי: export@lumel.com.pl
אגף ייצוא:
טל': (+48 68) 45 75 130, 45 75 131, 45 75 132
אֶלֶקטרוֹנִי: export@lumel.com.pl
כיול ואישור:
אֶלֶקטרוֹנִי: laboratorium@lumel.com.pl
SM3-09C 29.11.21
60-006-00-00371
מסמכים / משאבים
 |
LUMEL SM3 מודול 2 ערוצים של כניסות לוגיות או מונה [pdfמדריך למשתמש SM3 מודול 2 ערוצים של כניסות לוגיות או מונה, SM3, מודול 2 ערוצים של כניסות לוגיות או מונה, כניסות לוגיות או מונה |



