Invertek Drives OPT-2-ENCOD-IN OPTIDRIVE ကုဒ်ဒါ အင်တာဖေ့စ်

ထုတ်ကုန်အချက်အလက်- OPTIDRIVE ကုဒ်ဒါ အင်တာဖေ့စ်
OPTIDRIVE ကုဒ်ဒါ အင်တာဖေ့စ်သည် Optidrive P2 နှင့် Optidrive ဓာတ်လှေကားဒရိုက်များနှင့် အသုံးပြုရန်အတွက် ဒီဇိုင်းထုတ်ထားသော ရွေးချယ်မှု မော်ဂျူးတစ်ခုဖြစ်သည်။ ၎င်းသည် လွယ်ကူသော စောင့်ကြည့်ခြင်းအတွက် LED အခြေအနေကို ညွှန်ပြပြီး အမျိုးမျိုးသော ကုဒ်ဒါအမျိုးအစားများနှင့် တွဲဖက်အသုံးပြုနိုင်ပါသည်။
LED Status ကိုညွှန်ပြ
ကုဒ်ပြောင်းကိရိယာ မော်ဂျူးတွင် LED 2 လုံး - LED A (အစိမ်းရောင်) နှင့် LED B (အနီရောင်) ရှိသည်။
- LED A (အစိမ်းရောင်)- ကုဒ်ဒါလုပ်ဆောင်မှု အခြေအနေကို ညွှန်ပြသည်။
- LED B (အနီရောင်)- ကုဒ်ပြောင်းကိရိယာ လုပ်ဆောင်ချက်နှင့် သက်ဆိုင်သည့် အမှားအယွင်းကုဒ်များကို ညွှန်ပြသည်။

အမှားကုဒ်ကို drive မျက်နှာပြင်ပေါ်တွင် ညွှန်ပြထားသည်။ Error Code ၏ သတ်မှတ်ချက်များကို ကြည့်ပါ။ ယာယီ ချို့ယွင်းချက်များ အတွက်၊ module တွင် ချို့ယွင်းချက်တစ်ခုကို အကြောင်းကြားရန် LED သည် 50ms အထိ လင်းနေမည်ဖြစ်သည်။
ကုဒ်အဓိပ္ပာယ်ဖွင့်ဆိုချက်အမှား
အောက်ဖော်ပြပါ အမှားအယွင်းကုဒ်များသည် ကုဒ်ပြောင်းသည့်လုပ်ဆောင်ချက်နှင့် ဆက်စပ်နေသည်-
လိုက်ဖက်မှု
OPTIDRIVE ကုဒ်ပြောင်းသည့် အင်တာဖေ့စ်သည် အောက်ပါထုတ်ကုန်အပိုင်းအခြားများနှင့် တွဲဖက်အသုံးပြုနိုင်သည်-
- Optidrive P2 (ODP-2-…. Drives)
- Optidrive ဓာတ်လှေကား (ODL-2-…. Drives)
Model ကုဒ်
OPT-2-ENCOD-IN (5 ဗို့ TTL ဗားရှင်း)
OPT-2-ENCHT (8 – 30 ဗို့ HTL ဗားရှင်း)
လိုက်ဖက်သောကုဒ်ဒါအမျိုးအစားများ
TTL ဗားရှင်း- 5V TTL – A & B ချန်နယ်ကို ချီးမွမ်းပါ။
HTL ဗားရှင်း 24V HTL – A & B ချန်နယ်
မှတ်ချက်- +24V HTL ကုဒ်ဒါသည် ပြင်ပထောက်ပံ့မှုပမာဏ လိုအပ်သည်။tage
သတ်မှတ်ချက်များ
- Power Supply Output: 5V DC @ 200mA Max
- အများဆုံးထည့်သွင်းမှုအကြိမ်ရေ- 500kHz
- ပတ်ဝန်းကျင်- 0°C မှ +50°C
- Terminal Torque: 0.5Nm (4.5 Ib-in)
အမှားသတ်မှတ်ချက်
OPTIDRIVE ကုဒ်ဒါ အင်တာဖေ့စ်သည် ကုဒ်ဒါလုပ်ဆောင်မှုနှင့် ပတ်သက်သော အမှားအယွင်းကုဒ်များကို ပြသနိုင်သည်။ အမှားကုဒ်ကို drive မျက်နှာပြင်ပေါ်တွင် ညွှန်ပြထားသည်။ နောက်ထပ်အချက်အလက်များအတွက် အသုံးပြုသူလက်စွဲရှိ Error Code အဓိပ္ပါယ်ဖွင့်ဆိုချက်ကဏ္ဍကို ဖတ်ရှုပါ။
ထုတ်ကုန်အသုံးပြုမှု ညွှန်ကြားချက်များ
စက်တပ်ဆင်ခြင်း။
စက်ပိုင်းဆိုင်ရာ တပ်ဆင်မှုအတွက် အောက်ပါအဆင့်များကို လိုက်နာပါ-
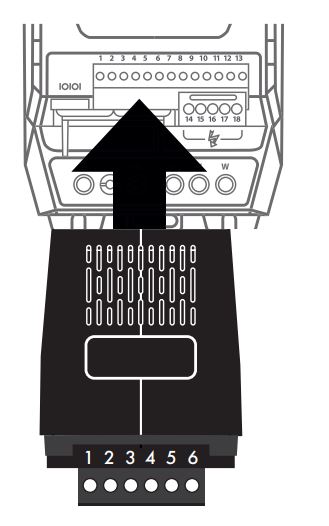
- Option Module ကို Optidrive Option Module Port တွင် ထည့်သွင်းပါ။ လမ်းညွှန်မှုအတွက် အသုံးပြုသူလက်စွဲရှိ ဇယားကို ကိုးကားပါ။
- ရွေးချယ်ခွင့် မော်ဂျူးကို ဆိပ်ကမ်းထဲသို့ ထည့်သွင်းစဉ် လွန်လွန်ကဲကဲ အင်အားကို အသုံးမပြုကြောင်း သေချာပါစေ။
- Optidrive ကို ပါဝါမဖွင့်မီ ရွေးချယ်မှု module ကို လုံခြုံစွာ တပ်ဆင်ထားကြောင်း သေချာပါစေ။
- ချိတ်ဆက်မှုများကို တင်းကျပ်ခြင်းမပြုမီ၊ ရွေးချယ်မှု module မှ terminal block header ကို ဖယ်ရှားပါ။ ဝါယာကြိုးများ ပြီးပါက အစားထိုးပါ။
- Specifications ကဏ္ဍတွင် ပေးထားသော torque ဆက်တင်သို့ ချိတ်ဆက်မှုများကို တင်းကျပ်ပါ။
လျှပ်စစ်တပ်ဆင်ခြင်း။
လျှပ်စစ်တပ်ဆင်မှုအတွက် အောက်ပါအဆင့်များကို လိုက်နာပါ။
- အလုံးစုံ အကာအရံ လိမ်ထားသော တွဲချိတ်ထားသော ကေဘယ်ကို အသုံးပြုပါ။
- ဒိုင်းကို အစွန်းနှစ်ဖက်တွင် Ground (PE) နှင့် ချိတ်ဆက်ပါ။
- ကုဒ်ဒါကြိုးအကာအကွယ်ကို drive သို့မဟုတ် ကုဒ်ဒါ module ၏ 0V သို့ မချိတ်ဆက်ပါနှင့်။
- အနည်းဆုံး 500mm အကွာအဝေးကို ထိန်းသိမ်းပါ။
- Overall Shielded twisted paired cable ကိုအသုံးပြုနိုင်ပါသည်။
- Shield သည် Ends နှစ်ခုလုံးကို Ground (PE) နှင့် ချိတ်ဆက်သင့်သည်။
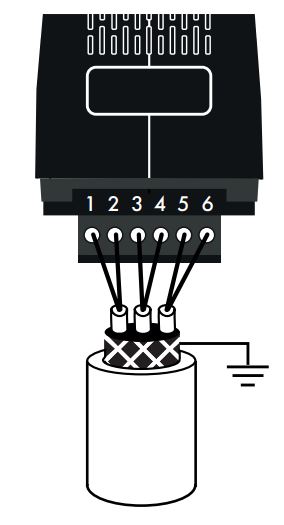
Connection အတထွamples
5V TTL ကုဒ်နံပါတ် - OPT-2-ENCOD-IN
24V HTL ကုဒ်ဒါ - OPT-2-ENCHT
တနည်းအားဖြင့် (ပြင်ပထောက်ပံ့မှုသို့) ဘုတ်ပေါ်ရှိ 24V ထောက်ပံ့ရေးဒရိုက်များကို သုံးနိုင်သည် (T1 (24V) နှင့် T7 (0V)) - T1 မှ စုစုပေါင်းလက်ရှိသုံးစွဲမှု 100mA ထက်မကျော်လွန်ကြောင်း သေချာပါစေ။
မှတ်ချက် ကုဒ်ဒါ၏ 0V ကို drive 0V (T7) နှင့်လည်း ချိတ်ဆက်ရပါမည်။
မှတ်ချက် ကုဒ်ဒါကြိုးအကာအကွယ်ကို drive သို့မဟုတ် ကုဒ်ဒါ module ၏ 0V သို့ မချိတ်ဆက်ပါနှင့်။
ချိတ်ဆက်မှုအတွက် အသုံးပြုသူလက်စွဲကို ကိုးကားပါ။amples နှင့်လိုက်နာပါ။ ဤမှတ်စုများ-
- ကုဒ်ဒါကြိုးအကာအကွယ်ကို drive သို့မဟုတ် ကုဒ်ဒါ module ၏ 0V နှင့် မချိတ်ဆက်ကြောင်း သေချာပါစေ။
- ကုဒ်ဒါ၏ 0V ကို drive 0V (T7) သို့ ချိတ်ဆက်ရပါမည်။
စစ်ဆင်ရေးနှင့်ကော်မရှင်အဖွဲ့ဝင်
ခန့်အပ်သည့်အခါ အောက်ပါအဆင့်များကို လိုက်နာပါ-
- Encoderless Vector Speed Control (P6-05 = 0) တွင် Optidrive ကို ကနဦးတွင် ကော်မရှင်ဖွဲ့ပါ။
- တုံ့ပြန်ချက်အချက်ပြမှုသည် drive ရှိအမြန်နှုန်းရည်ညွှန်းချက်နှင့်ကိုက်ညီကြောင်းသေချာစေရန်အမြန်နှုန်းနှင့် polarity စစ်ဆေးမှုကိုလုပ်ဆောင်ပါ။
လိုက်နာမှု
ဤတွင်၊ Invertek Drives Ltd မှ Optidrive Encoder Interface ကို ကြေညာသည်။ မော်ဒယ်ကုဒ်- OPT-2-ENCOD-IN နှင့် OPT-2-ENCHT သည် ညွှန်ကြားချက် 2014/30/EU၊ 2014/35/EU၊ 2011/65/EU နှင့် ကိုက်ညီမှုရှိကြောင်း EU ကြေငြာချက်ကို သင်၏ Invertek ထံမှ တောင်းဆိုမှုအရ ရရှိနိုင်ပါသည်။ Drives အရောင်းအဖော်။
ရွေးချယ်မှု မော်ဂျူး ချိတ်ဆက်မှုများ
စစ်ဆင်ရေး
ကန့်သတ်ချက်များ ဆက်တင်များ
ကုဒ်ပြောင်းကိရိယာဖြင့် လုပ်ဆောင်သည့်အခါ၊ အနည်းဆုံးအဖြစ် အောက်ပါ ကန့်သတ်ချက်များ ဆက်တင်များ လိုအပ်သည်-
- P1-09- မော်တာအဆင့်သတ်မှတ်ထားသော ကြိမ်နှုန်း (မော်တာအမည်ပြားပေါ်တွင် တွေ့ရသည်)။
- P1-10- မော်တာ အဆင့်သတ်မှတ်ထားသော အမြန်နှုန်း (မော်တာ နံပါတ်ပြားပေါ်တွင် တွေ့ရသည်)။
- P6-06- ကုဒ်ပြောင်းသည့် PPR တန်ဖိုး (ချိတ်ဆက်ထားသည့် ကုဒ်ဒါအတွက် တန်ဖိုးထည့်ပါ)။
Closed Loop Vector speed သည် သုညအမြန်နှုန်းတွင် အပြည့်အဝ torque ထိန်းထားနိုင်မှုနှင့် 1Hz အောက် ကြိမ်နှုန်းများတွင် ပိုမိုကောင်းမွန်သော လုပ်ဆောင်မှုကို ပံ့ပိုးပေးပါသည်။ drive၊ encoder module နှင့် encoder ကို vol အရ ချိတ်ဆက်သင့်သည်။tagဝါယာကြိုးပုံများ တွင် ပြထားသည့်အတိုင်း ကုဒ်ပြောင်းကိရိယာ၏ e အဆင့်သတ်မှတ်ချက်။ ကုဒ်နံပါတ်ကြိုးသည် လုံး၀ အကာအရံ အမျိုးအစား ဖြစ်သင့်ပြီး အစွန်းနှစ်ဖက်စလုံးတွင် မြေကြီးနှင့် ကာထားသော အကာဖြစ်သည်။
ကော်မရှင်အဖွဲ့ဝင်
ခန့်အပ်သည့်အခါ၊ Optidrive ကို Encoder လျော့နည်းသော Vector Speed Control (P6-05 = 0) တွင် ဦးစွာတာဝန်ပေးအပ်သင့်ပြီး တုံ့ပြန်ချက်အချက်ပြမှု၏နိမိတ်လက္ခဏာသည် မြန်နှုန်းရည်ညွှန်းချက်နှင့် ကိုက်ညီကြောင်း သေချာစေရန်အတွက် အမြန်နှုန်း/ဝင်ရိုးစွန်းစစ်ဆေးမှုကို ပြုလုပ်သင့်သည်။ မောင်း။ ကုဒ်နံပါတ်သည် Optidrive သို့ မှန်ကန်စွာ ချိတ်ဆက်ထားသည်ဟု ယူဆပါက အောက်ပါအဆင့်များသည် အကြံပြုထားသည့် ကော်မရှင်လုပ်ငန်း အပိုင်းကို ပြသသည်။
- မော်တာအမည်ပြားမှ အောက်ပါ parameters များကို ရိုက်ထည့်ပါ။
- P1-07 – မော်တာ အဆင့်သတ်မှတ်ထားသော Voltage
- P1-08 – မော်တာ အဆင့်သတ်မှတ်ထားသော လက်ရှိ
- P1-09 – မော်တာအဆင့်သတ်မှတ်ထားသော ကြိမ်နှုန်း
- P1-10 – မော်တာ အဆင့်သတ်မှတ်ထားသော အမြန်နှုန်း
- လိုအပ်သောအဆင့်မြင့်ကန့်သတ်ဘောင်များသို့ဝင်ရောက်ခွင့်ကိုဖွင့်ရန် P1-14 = 201 သတ်မှတ်ပါ။
- P4-01=0 သတ်မှတ်ခြင်းဖြင့် Vector Speed Control Mode ကို ရွေးပါ။
- P4-02=1 ကို သတ်မှတ်ခြင်းဖြင့် အလိုအလျောက်ချိန်ညှိမှု ပြုလုပ်ပါ။
- အော်တိုချိန်ညှိခြင်းပြီးသည်နှင့်၊ Optidrive သည် နိမ့်သောအမြန်နှုန်းရည်ညွှန်းချက်ဖြင့် ရှေ့သို့လည်ပတ်သင့်သည် (ဥပမာ 2 – 5Hz)။ မော်တာသည် မှန်ကန်ပြီး ချောမွေ့စွာလည်ပတ်ကြောင်း သေချာပါစေ။
- P0-58 ရှိ Encoder တုံ့ပြန်ချက်တန်ဖိုးကို စစ်ဆေးပါ။ Optidrive သည် ရှေ့ဦးတည်ချက်တွင် လည်ပတ်နေသဖြင့်၊ တန်ဖိုးသည် အပြုသဘောဆောင်ကာ + / – 5% အမြင့်ဆုံးပြောင်းလဲမှုဖြင့် တည်ငြိမ်သင့်သည်။ ဤပါရာမီတာရှိတန်ဖိုးသည် အပြုသဘောဖြစ်ပါက ကုဒ်ဒါကြိုးကြိုးသည် မှန်ကန်ပါသည်။ တန်ဖိုးသည် အနုတ်လက္ခဏာဖြစ်ပါက၊ မြန်နှုန်းတုံ့ပြန်ချက်သည် ပြောင်းပြန်ဖြစ်သည်။ ၎င်းကိုပြင်ရန်၊ ကုဒ်ပြောင်းကိရိယာမှ A နှင့် B အချက်ပြချန်နယ်များကို ပြောင်းပြန်လှန်ပါ။
- drive output speed ကိုပြောင်းလဲခြင်းသည် အမှန်တကယ်မော်တာအမြန်နှုန်း၏ပြောင်းလဲမှုကိုထင်ဟပ်စေရန် P0-58 ၏တန်ဖိုးပြောင်းလဲသွားမည်ဖြစ်သည်။ ဒီလိုမှမဟုတ်ရင် စနစ်တစ်ခုလုံးရဲ့ ဝါယာကြိုးကို စစ်ဆေးပါ။
- အထက်ပါစစ်ဆေးမှုကို ကျော်သွားပါက၊ P6-05 မှ 1 သို့ သတ်မှတ်ခြင်းဖြင့် တုံ့ပြန်ချက်ထိန်းချုပ်မှုလုပ်ဆောင်ချက်ကို ဖွင့်နိုင်သည်။
အာမခံ
ပြီးပြည့်စုံသော အာမခံ စည်းမျဥ်းစည်းကမ်းများကို သင်၏ IDL အခွင့်အာဏာ ဖြန့်ဖြူးသူထံမှ တောင်းဆိုချက်အရ ရရှိနိုင်ပါသည်။
Invertek Drives Ltd
Offa ၏ Dyke စီးပွားရေးပန်းခြံ
Welshpool
Powys, UK
SY21 8JF
www.invertekdrives.com
Optidrive Encoder Interface Module အသုံးပြုသူလမ်းညွှန်
ဗားရှင်း 2.00
စာရွက်စာတမ်းများ / အရင်းအမြစ်များ
 |
Invertek Drives OPT-2-ENCOD-IN OPTIDRIVE ကုဒ်ဒါ အင်တာဖေ့စ် [pdf] အသုံးပြုသူလမ်းညွှန် OPT-2-ENCOD-IN၊ OPT-2-ENCHT၊ OPT-2-ENCOD-IN OPTIDRIVE ကုဒ်ဒါ အင်တာဖေ့စ်၊ OPT-2-ENCOD-IN၊ OPTIDRIVE ကုဒ်ဒါ အင်တာဖေ့စ်၊ ကုဒ်ဒါ အင်တာဖေ့စ်၊ |