Invertek Drives OPT-2-ENCOD-IN OPTIDRIVE એન્કોડર ઈન્ટરફેસ

ઉત્પાદન માહિતી: OPTIDRIVE એન્કોડર ઈન્ટરફેસ
ઓપ્ટીડ્રાઈવ એન્કોડર ઈન્ટરફેસ એ એક વિકલ્પ મોડ્યુલ છે જે ઓપ્ટીડ્રાઈવ P2 અને ઓપ્ટીડ્રાઈવ એલિવેટર ડ્રાઈવ સાથે વાપરવા માટે રચાયેલ છે. તે સરળ દેખરેખ માટે એલઇડી સ્થિતિ સંકેત પ્રદાન કરે છે અને વિવિધ એન્કોડર પ્રકારો સાથે સુસંગત છે.
એલઇડી સ્થિતિ સૂચક
એન્કોડર મોડ્યુલમાં 2 LEDs છે - LED A (ગ્રીન) અને LED B (લાલ).
- LED A (લીલો): એન્કોડર ઓપરેશનની સ્થિતિ સૂચવે છે.
- LED B (લાલ): એન્કોડર ઑપરેશનથી સંબંધિત ફોલ્ટ કોડ સૂચવે છે.

ફોલ્ટ કોડ ડ્રાઇવ ડિસ્પ્લે પર દર્શાવેલ છે. કૃપા કરીને ભૂલ કોડ વ્યાખ્યાઓ જુઓ. ક્ષણિક ખામીઓ માટે, મોડ્યુલ પર ખામીને સૂચિત કરવા માટે LED 50ms માટે પ્રકાશિત રહેશે.
ભૂલ કોડ વ્યાખ્યાઓ
નીચેના ભૂલ કોડ્સ એન્કોડર ઓપરેશનથી સંબંધિત છે:
સુસંગતતા
OPTIDRIVE એન્કોડર ઈન્ટરફેસ નીચેની ઉત્પાદન શ્રેણીઓ સાથે સુસંગત છે:
- Optidrive P2 (ODP-2-….ડ્રાઇવ્સ)
- ઓપ્ટીડ્રાઈવ એલિવેટર (ODL-2-…. ડ્રાઈવો)
મોડેલ કોડ
OPT-2-ENCOD-IN (5 વોલ્ટ TTL સંસ્કરણ)
OPT-2-ENCHT (8 - 30 વોલ્ટ HTL સંસ્કરણ)
સુસંગત એન્કોડર પ્રકારો
TTL વર્ઝન : 5V TTL – A & B ચેનલ કોમ્પ્લીમેન્ટ સાથે
HTL સંસ્કરણ 24V HTL – પ્રશંસા સાથે A & B ચેનલ
નોંધ: +24V HTL એન્કોડરને બાહ્ય સપ્લાય વોલ્યુમની જરૂર છેtage
વિશિષ્ટતાઓ
- પાવર સપ્લાય આઉટપુટ: 5V DC @ 200mA મેક્સ
- મહત્તમ ઇનપુટ આવર્તન: 500kHz
- પર્યાવરણીય: 0°C - +50°C
- ટર્મિનલ ટોર્ક: 0.5Nm (4.5 Ib-in)
ભૂલ કોડ વ્યાખ્યાઓ
ઓપ્ટીડ્રાઈવ એન્કોડર ઈન્ટરફેસ એન્કોડર ઓપરેશનથી સંબંધિત એરર કોડ પ્રદર્શિત કરી શકે છે. ફોલ્ટ કોડ ડ્રાઇવ ડિસ્પ્લે પર દર્શાવેલ છે. કૃપા કરીને વધુ માહિતી માટે વપરાશકર્તા માર્ગદર્શિકામાં ભૂલ કોડ વ્યાખ્યાઓ વિભાગનો સંદર્ભ લો.
ઉત્પાદન વપરાશ સૂચનાઓ
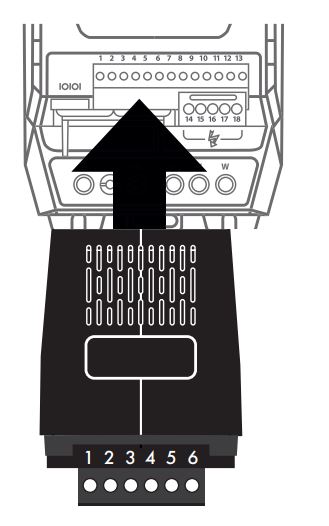
યાંત્રિક સ્થાપન
યાંત્રિક સ્થાપન માટે આ પગલાં અનુસરો:
- Optidrive વિકલ્પ મોડ્યુલ પોર્ટમાં વિકલ્પ મોડ્યુલ દાખલ કરો. માર્ગદર્શન માટે વપરાશકર્તા માર્ગદર્શિકામાં ડાયાગ્રામનો સંદર્ભ લો.
- ખાતરી કરો કે પોર્ટમાં વિકલ્પ મોડ્યુલ દાખલ કરતી વખતે કોઈ અયોગ્ય બળનો ઉપયોગ કરવામાં આવ્યો નથી.
- ઓપ્ટીડ્રાઈવ પર પાવર કરતા પહેલા વિકલ્પ મોડ્યુલ સુરક્ષિત રીતે ફીટ કરેલ છે તેની ખાતરી કરો.
- જોડાણોને કડક કરતા પહેલા, વિકલ્પ મોડ્યુલમાંથી ટર્મિનલ બ્લોક હેડરને દૂર કરો. વાયરિંગ પૂર્ણ થયા પછી તેને બદલો.
- સ્પષ્ટીકરણો વિભાગમાં પ્રદાન કરેલ ટોર્ક સેટિંગ સાથે જોડાણોને સજ્જડ કરો.
ઇલેક્ટ્રિકલ ઇન્સ્ટોલેશન
ઇલેક્ટ્રિકલ ઇન્સ્ટોલેશન માટે આ પગલાં અનુસરો:
- એકંદર ઢાલવાળી ટ્વિસ્ટેડ જોડીવાળી કેબલનો ઉપયોગ કરો.
- ઢાલને બંને છેડે ગ્રાઉન્ડ (PE) સાથે જોડો.
- એન્કોડર કેબલ શિલ્ડને ડ્રાઇવ અથવા એન્કોડર મોડ્યુલના 0V સાથે કનેક્ટ કરશો નહીં.
- ઓછામાં ઓછું 500mmનું અંતર જાળવો.
- એકંદરે શિલ્ડેડ ટ્વિસ્ટેડ જોડી કેબલનો ઉપયોગ કરવો
- શિલ્ડ બંને છેડા ગ્રાઉન્ડ (PE) સાથે જોડાયેલ હોવું જોઈએ
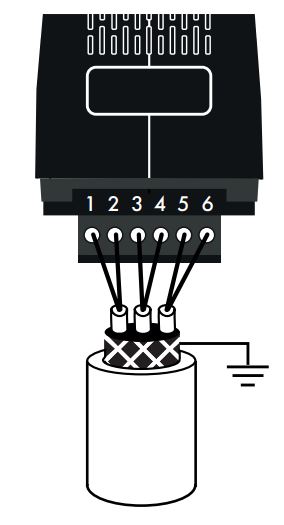
જોડાણ સampલેસ
5V TTL એન્કોડર - OPT-2-ENCOD-IN
24V HTL એન્કોડર - OPT-2-ENCHT
વૈકલ્પિક રીતે (બાહ્ય પુરવઠા માટે) ડ્રાઇવ્સ ઓન-બોર્ડ 24V સપ્લાયનો ઉપયોગ કરી શકાય છે (T1 (24V) અને T7 (0V)) - ખાતરી કરો કે T1 માંથી કુલ વર્તમાન વપરાશ 100mA કરતાં વધુ ન હોય.
નોંધ એન્કોડરનો 0V પણ ડ્રાઇવ 0V (T7) સાથે જોડાયેલ હોવો આવશ્યક છે.
નોંધ એન્કોડર કેબલ શિલ્ડને ડ્રાઇવ અથવા એન્કોડર મોડ્યુલના 0V સાથે કનેક્ટ કરશો નહીં.
કનેક્શન એક્સ માટે વપરાશકર્તા માર્ગદર્શિકાનો સંદર્ભ લોampલેસ અને અનુસરો આ નોંધો:
- ખાતરી કરો કે એન્કોડર કેબલ શિલ્ડ ડ્રાઇવ અથવા એન્કોડર મોડ્યુલના 0V સાથે જોડાયેલ નથી.
- એન્કોડરનો 0V ડ્રાઇવ 0V (T7) સાથે જોડાયેલ હોવો આવશ્યક છે.
ઓપરેશન અને કમિશનિંગ
કમિશન કરતી વખતે, આ પગલાં અનુસરો:
- શરૂઆતમાં એન્કોડરલેસ વેક્ટર સ્પીડ કંટ્રોલ (P6-05 = 0) માં ઓપ્ટીડ્રાઈવ કમિશન કરો.
- પ્રતિસાદ સિગ્નલ ડ્રાઇવમાં ઝડપ સંદર્ભ સાથે મેળ ખાય છે તેની ખાતરી કરવા માટે ઝડપ અને ધ્રુવીયતા તપાસો.
અનુપાલન
આથી, Invertek Drives Ltd જાહેર કરે છે કે Optidrive એન્કોડર ઈન્ટરફેસ. મોડલ કોડ: OPT-2-ENCOD-IN અને OPT-2-ENCHT ડાયરેક્ટિવ 2014/30/EU, 2014/35/EU, 2011/65/EU નું પાલન કરે છે તમારા Invertek ની વિનંતી પર EU અનુરૂપતાની ઘોષણા ઉપલબ્ધ છે ડ્રાઇવ્સ સેલ્સ પાર્ટનર.
વિકલ્પ મોડ્યુલ જોડાણો
ઓપરેશન
પરિમાણ સેટિંગ્સ
એન્કોડર સાથે ઓપરેટ કરતી વખતે, નીચેના પેરામીટર સેટિંગ્સ ન્યૂનતમ તરીકે આવશ્યક છે:
- P1-09: મોટર રેટેડ ફ્રીક્વન્સી (મોટર નેમપ્લેટ પર જોવા મળે છે).
- P1-10: મોટર રેટેડ ઝડપ (મોટર નેમપ્લેટ પર જોવા મળે છે).
- P6-06: એન્કોડર PPR મૂલ્ય (જોડાયેલ એન્કોડર માટે મૂલ્ય દાખલ કરો).
ક્લોઝ્ડ લૂપ વેક્ટર સ્પીડ શૂન્ય ગતિએ સંપૂર્ણ ટોર્ક હોલ્ડિંગ ક્ષમતા અને 1Hz થી ઓછી ફ્રીક્વન્સીઝ પર ઉન્નત કામગીરી પ્રદાન કરે છે. ડ્રાઇવ, એન્કોડર મોડ્યુલ અને એન્કોડર વોલ્યુમ અનુસાર જોડાયેલા હોવા જોઈએtagવાયરિંગ ડાયાગ્રામમાં બતાવ્યા પ્રમાણે એન્કોડરનું e રેટિંગ. એન્કોડર કેબલ એકંદરે કવચિત પ્રકારનો હોવો જોઈએ, જેમાં શિલ્ડ બંને છેડે પૃથ્વી સાથે જોડાયેલી હોય.
કમિશનિંગ
કમિશનિંગ કરતી વખતે, ઓપ્ટીડ્રાઈવને સૌપ્રથમ એન્કોડર લેસ વેક્ટર સ્પીડ કંટ્રોલ (P6-05 = 0) માં કમિશન કરવું જોઈએ, અને પછી ગતિ / ધ્રુવીયતા તપાસ કરવી જોઈએ કે જેથી પ્રતિસાદ સંકેતની નિશાની ઝડપ સંદર્ભ સાથે મેળ ખાતી હોય. ડ્રાઇવ એન્કોડર ઓપ્ટીડ્રાઈવ સાથે યોગ્ય રીતે જોડાયેલ છે એમ ધારીને, નીચેના પગલાં સૂચવેલ કમિશનિંગ ક્રમ દર્શાવે છે.
- મોટર નેમપ્લેટમાંથી નીચેના પરિમાણો દાખલ કરો:
- P1-07 - મોટર રેટેડ વોલ્યુમtage
- P1-08 - મોટર રેટ કરેલ વર્તમાન
- P1-09 - મોટર રેટેડ ફ્રીક્વન્સી
- P1-10 - મોટર રેટેડ ઝડપ
- જરૂરી અદ્યતન પરિમાણોની ઍક્સેસને સક્ષમ કરવા માટે, P1-14 = 201 સેટ કરો
- P4-01 = 0 સેટ કરીને વેક્ટર સ્પીડ કંટ્રોલ મોડ પસંદ કરો
- P4-02 = 1 સેટ કરીને ઓટો-ટ્યુન કરો
- એકવાર ઑટો-ટ્યુન પૂર્ણ થઈ જાય, ઑપ્ટીડ્રાઈવને ઓછી ઝડપના સંદર્ભ સાથે આગળની દિશામાં ચલાવવી જોઈએ (દા.ત. 2 – 5Hz). ખાતરી કરો કે મોટર યોગ્ય રીતે અને સરળતાથી ચાલે છે.
- P0-58 માં એન્કોડર ફીડબેક મૂલ્ય તપાસો. ઑપ્ટીડ્રાઈવ આગળની દિશામાં ચાલી રહી છે ત્યારે, મૂલ્ય હકારાત્મક હોવું જોઈએ, અને મહત્તમ +/– 5% ની વિવિધતા સાથે સ્થિર હોવું જોઈએ. જો આ પરિમાણમાં મૂલ્ય હકારાત્મક છે, તો એન્કોડર વાયરિંગ યોગ્ય છે. જો મૂલ્ય નકારાત્મક છે, તો ઝડપ પ્રતિસાદ ઊંધો છે. આને સુધારવા માટે, એન્કોડરમાંથી A અને B સિગ્નલ ચેનલોને ઉલટાવો.
- ડ્રાઇવ આઉટપુટ સ્પીડમાં ફેરફાર કરવાથી વાસ્તવિક મોટર સ્પીડના ફેરફારને પ્રતિબિંબિત કરવા માટે P0-58 ની કિંમત બદલવી જોઈએ. જો આ કિસ્સો ન હોય તો, સમગ્ર સિસ્ટમની વાયરિંગ તપાસો.
- જો ઉપરોક્ત ચેક પાસ થઈ જાય, તો પ્રતિસાદ નિયંત્રણ કાર્ય P6-05 થી 1 સેટ કરીને સક્ષમ કરી શકાય છે.
વોરંટી
તમારા IDL અધિકૃત વિતરકની વિનંતી પર સંપૂર્ણ વોરંટી નિયમો અને શરતો ઉપલબ્ધ છે.
ઇન્વર્ટેક ડ્રાઇવ્સ લિ
ઓફાનો ડાઇક બિઝનેસ પાર્ક
વેલ્શપૂલ
પોવીસ, યુકે
SY21 8JF
www.invertekdrives.com
Optidrive એન્કોડર ઈન્ટરફેસ મોડ્યુલ વપરાશકર્તા માર્ગદર્શિકા
સંસ્કરણ 2.00
દસ્તાવેજો / સંસાધનો
 |
Invertek Drives OPT-2-ENCOD-IN OPTIDRIVE એન્કોડર ઈન્ટરફેસ [પીડીએફ] વપરાશકર્તા માર્ગદર્શિકા OPT-2-ENCOD-IN, OPT-2-ENCHT, OPT-2-ENCOD-IN OPTIDRIVE એન્કોડર ઈન્ટરફેસ, OPT-2-ENCOD-IN, OPTIDRIVE એન્કોડર ઈન્ટરફેસ, એન્કોડર ઈન્ટરફેસ, ઈન્ટરફેસ |