Invertek Drives OPT-2-ENCOD-IN OPTIDRIVE ການໂຕ້ຕອບຕົວເຂົ້າລະຫັດ

ຂໍ້ມູນຜະລິດຕະພັນ: ການໂຕ້ຕອບຕົວເຂົ້າລະຫັດ OPTIDRIVE
OPTIDRIVE Encoder Interface ແມ່ນໂມດູນທາງເລືອກທີ່ອອກແບບມາເພື່ອໃຊ້ກັບ Optidrive P2 ແລະ Optidrive Elevator drives. ມັນສະຫນອງຕົວຊີ້ບອກສະຖານະ LED ສໍາລັບການຕິດຕາມໄດ້ງ່າຍແລະເຫມາະສົມກັບຕົວເຂົ້າລະຫັດປະເພດຕ່າງໆ.
ຕົວຊີ້ບອກສະຖານະພາບ LED
ໂມດູນຕົວເຂົ້າລະຫັດມີ 2 LEDs – LED A (ສີຂຽວ) ແລະ LED B (ສີແດງ).
- LED A (ສີຂຽວ): ສະແດງສະຖານະຂອງການດໍາເນີນງານຕົວເຂົ້າລະຫັດ.
- LED B (ສີແດງ): ສະແດງລະຫັດຄວາມຜິດທີ່ກ່ຽວຂ້ອງກັບການເຮັດວຽກຂອງຕົວເຂົ້າລະຫັດ.

ລະຫັດຄວາມຜິດພາດແມ່ນໄດ້ລະບຸໄວ້ໃນການສະແດງຂອງຂັບໄດ້. ກະລຸນາເບິ່ງ Error Code ນິຍາມ. ສໍາລັບຄວາມຜິດຊົ່ວຄາວ, LED ຈະຍັງຄົງສະຫວ່າງສໍາລັບ 50ms ເພື່ອແຈ້ງຄວາມຜິດໃນໂມດູນ.
ຄໍານິຍາມລະຫັດຄວາມຜິດພາດ
ລະຫັດຂໍ້ຜິດພາດຕໍ່ໄປນີ້ແມ່ນກ່ຽວຂ້ອງກັບການເຮັດວຽກຂອງຕົວເຂົ້າລະຫັດ:
ຄວາມເຂົ້າກັນໄດ້
ການໂຕ້ຕອບຕົວເຂົ້າລະຫັດ OPTIDRIVE ແມ່ນເຂົ້າກັນໄດ້ກັບລະດັບຜະລິດຕະພັນຕໍ່ໄປນີ້:
- Optidrive P2 (ODP-2-…. Drives)
- Optidrive Elevator (ODL-2-…. Drives)
Model Code
OPT-2-ENCOD-IN (ລຸ້ນ 5 ໂວນ TTL)
OPT-2-ENCHT (8 – 30 Volt ລຸ້ນ HTL)
ປະເພດຕົວເຂົ້າລະຫັດເຂົ້າກັນໄດ້
ລຸ້ນ TTL : 5V TTL – A & B Channel ທີ່ມີການຍ້ອງຍໍ
ລຸ້ນ HTL 24V HTL – A & B Channel ທີ່ມີການຍ້ອງຍໍ
ຫມາຍເຫດ: +24V HTL encoder ຮຽກຮ້ອງໃຫ້ມີການສະຫນອງພາຍນອກ voltage
ຂໍ້ມູນຈໍາເພາະ
- Power Supply Output: 5V DC @ 200mA Max
- ຄວາມຖີ່ຂອງການປ້ອນຂໍ້ມູນສູງສຸດ: 500kHz
- ສະພາບແວດລ້ອມ: 0°C – +50°C
- ແຮງບິດຢູ່ປາຍຍອດ: 0.5Nm (4.5 Ib-in)
ຄໍານິຍາມລະຫັດຜິດພາດ
ການໂຕ້ຕອບຕົວເຂົ້າລະຫັດ OPTIDRIVE ອາດຈະສະແດງລະຫັດຂໍ້ຜິດພາດທີ່ກ່ຽວຂ້ອງກັບການເຮັດວຽກຂອງຕົວເຂົ້າລະຫັດ. ລະຫັດຄວາມຜິດພາດແມ່ນໄດ້ລະບຸໄວ້ໃນການສະແດງຂອງຂັບໄດ້. ກະລຸນາເບິ່ງພາກສ່ວນຄໍານິຍາມລະຫັດຄວາມຜິດພາດໃນຄູ່ມືຜູ້ໃຊ້ສໍາລັບຂໍ້ມູນເພີ່ມເຕີມ.
ຄໍາແນະນໍາການນໍາໃຊ້ຜະລິດຕະພັນ
ການຕິດຕັ້ງກົນຈັກ
ປະຕິບັດຕາມຂັ້ນຕອນເຫຼົ່ານີ້ສໍາລັບການຕິດຕັ້ງກົນຈັກ:
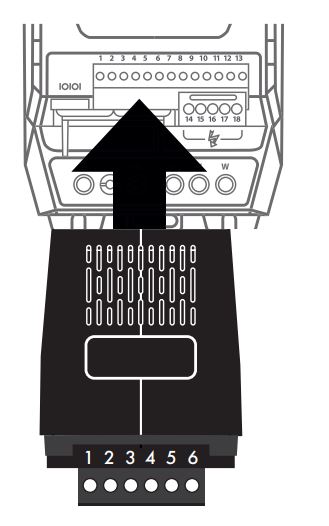
- ໃສ່ໂມດູນທາງເລືອກເຂົ້າໃນຊ່ອງ Optidrive Option Module Port. ອ້າງອີງໃສ່ແຜນວາດໃນຄູ່ມືຜູ້ໃຊ້ສຳລັບການແນະນຳ.
- ໃຫ້ແນ່ໃຈວ່າບໍ່ມີຜົນບັງຄັບໃຊ້ຫຼາຍເກີນໄປໃນຂະນະທີ່ໃສ່ໂມດູນທາງເລືອກເຂົ້າໄປໃນພອດ.
- ໃຫ້ແນ່ໃຈວ່າໂມດູນທາງເລືອກຖືກຕິດຕັ້ງຢ່າງປອດໄພກ່ອນທີ່ຈະເປີດເຄື່ອງ Optidrive.
- ກ່ອນທີ່ຈະເຄັ່ງຄັດເຊື່ອມຕໍ່, ເອົາຫົວບລັອກ terminal ອອກຈາກໂມດູນທາງເລືອກ. ປ່ຽນມັນຫຼັງຈາກສາຍໄຟສໍາເລັດ.
- Tighten the connections to the torque setting provides in the Specifications section.
ການຕິດຕັ້ງໄຟຟ້າ
ປະຕິບັດຕາມຂັ້ນຕອນເຫຼົ່ານີ້ສໍາລັບການຕິດຕັ້ງໄຟຟ້າ:
- ໃຊ້ສາຍເຄເບີ້ນຄູ່ບິດທີ່ມີແຜ່ນປ້ອງກັນໂດຍລວມ.
- ເຊື່ອມຕໍ່ໄສ້ກັບດິນ (PE) ຢູ່ທັງສອງສົ້ນ.
- ຢ່າເຊື່ອມຕໍ່ສາຍປ້ອງກັນສາຍເຂົ້າລະຫັດກັບ 0V ຂອງໄດ ຫຼືໂມດູນຕົວເຂົ້າລະຫັດ.
- ຮັກສາໄລຍະຫ່າງຕໍາ່ສຸດທີ່ 500mm.
- ໂດຍທົ່ວໄປ Shielded ສາຍບິດບິດຄູ່ທີ່ຈະນໍາໃຊ້
- ໄສ້ຄວນຈະເຊື່ອມຕໍ່ກັບ Ground (PE) ທັງສອງ Ends
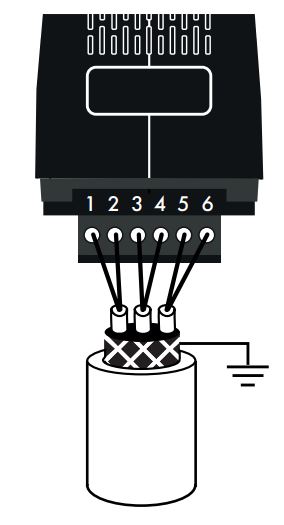
ການເຊື່ອມຕໍ່ Examples
ຕົວເຂົ້າລະຫັດ 5V TTL – OPT-2-ENCOD-IN
ຕົວເຂົ້າລະຫັດ 24V HTL – OPT-2-ENCHT
ອີກທາງເລືອກ (ການສະຫນອງພາຍນອກ) ການສະຫນອງ 24V ໄດເທິງເຮືອສາມາດຖືກນໍາໃຊ້ (T1 (24V) ແລະ T7 (0V)) - ໃຫ້ແນ່ໃຈວ່າການບໍລິໂພກໃນປະຈຸບັນທັງຫມົດຈາກ T1 ບໍ່ເກີນ 100mA.
ໝາຍເຫດ 0V ຂອງຕົວເຂົ້າລະຫັດຍັງຕ້ອງເຊື່ອມຕໍ່ກັບໄດ 0V (T7).
ໝາຍເຫດ ຢ່າເຊື່ອມຕໍ່ສາຍປ້ອງກັນສາຍເຂົ້າລະຫັດກັບ 0V ຂອງໄດ ຫຼືໂມດູນຕົວເຂົ້າລະຫັດ.
ເບິ່ງຄູ່ມືຜູ້ໃຊ້ສໍາລັບການເຊື່ອມຕໍ່ examples ແລະປະຕິບັດຕາມ ບັນທຶກເຫຼົ່ານີ້:
- ໃຫ້ແນ່ໃຈວ່າໄສ້ສາຍເຂົ້າລະຫັດບໍ່ໄດ້ເຊື່ອມຕໍ່ກັບ 0V ຂອງໄດ ຫຼືໂມດູນຕົວເຂົ້າລະຫັດ.
- 0V ຂອງຕົວເຂົ້າລະຫັດຕ້ອງເຊື່ອມຕໍ່ກັບໄດ 0V (T7).
ການດໍາເນີນງານແລະການມອບຫມາຍ
ໃນເວລາທີ່ການມອບຫມາຍ, ປະຕິບັດຕາມຂັ້ນຕອນເຫຼົ່ານີ້:
- ມອບໝາຍ Optidrive ໃນການຄວບຄຸມຄວາມໄວແບບເຂົ້າລະຫັດ vector (P6-05 = 0) ໃນເບື້ອງຕົ້ນ.
- ປະຕິບັດການກວດສອບຄວາມໄວແລະຂົ້ວເພື່ອຮັບປະກັນວ່າສັນຍານຄໍາຄຶດຄໍາເຫັນກົງກັບການອ້າງອີງຄວາມໄວໃນໄດ.
ການປະຕິບັດຕາມ
ໂດຍວິທີນີ້, Invertek Drives Ltd ປະກາດວ່າ Optidrive Encoder Interface. ລະຫັດຕົວແບບ: OPT-2-ENCOD-IN ແລະ OPT-2-ENCHT ແມ່ນປະຕິບັດຕາມຄໍາສັ່ງ 2014/30/EU, 2014/35/EU, 2011/65/EU ການປະກາດຄວາມສອດຄ່ອງຂອງສະຫະພາບເອີຣົບແມ່ນມີໃຫ້ຕາມຄໍາຮ້ອງຂໍຈາກ Invertek ຂອງທ່ານ. Drives ຄູ່ຮ່ວມງານການຂາຍ.
ການເຊື່ອມຕໍ່ໂມດູນທາງເລືອກ
ການດໍາເນີນງານ
ການຕັ້ງຄ່າພາລາມິເຕີ
ໃນເວລາທີ່ປະຕິບັດການກັບ encoder ເປັນ, ການຕັ້ງຄ່າດັ່ງຕໍ່ໄປນີ້ແມ່ນຕ້ອງການເປັນຕໍາ່ສຸດທີ່:
- P1-09: ຄວາມຖີ່ການຈັດອັນດັບຂອງມໍເຕີ (ພົບເຫັນຢູ່ໃນແຜ່ນປ້າຍຊື່ມໍເຕີ).
- P1-10: Motor rated speed (ພົບໃນ motor nameplate).
- P6-06: ຄ່າຕົວເຂົ້າລະຫັດ PPR (ໃສ່ຄ່າສໍາລັບຕົວເຂົ້າລະຫັດທີ່ເຊື່ອມຕໍ່).
Closed Loop Vector speed ສະໜອງຄວາມສາມາດໃນການຖືແຮງບິດເຕັມທີ່ຢູ່ທີ່ຄວາມໄວສູນ ແລະປັບປຸງການເຮັດວຽກທີ່ຄວາມຖີ່ຕໍ່າກວ່າ 1Hz. ໄດ, ໂມດູນຕົວເຂົ້າລະຫັດແລະຕົວເຂົ້າລະຫັດຄວນເຊື່ອມຕໍ່ຕາມ voltage rating ຂອງຕົວເຂົ້າລະຫັດດັ່ງທີ່ສະແດງຢູ່ໃນແຜນວາດສາຍ. ສາຍເຂົ້າລະຫັດຄວນເປັນປະເພດປ້ອງກັນໂດຍລວມ, ໂດຍມີໄສ້ທີ່ຕິດຢູ່ກັບແຜ່ນດິນໂລກຢູ່ທັງສອງສົ້ນ.
ການມອບໝາຍ
ໃນເວລາທີ່ການມອບຫມາຍ, Optidrive ທໍາອິດຄວນໄດ້ຮັບການມອບຫມາຍໃນ Encoder ການຄວບຄຸມຄວາມໄວ Vector ຫນ້ອຍ (P6-05 = 0), ແລະການກວດສອບຄວາມໄວ / polarity ຄວນເຮັດເພື່ອຮັບປະກັນວ່າສັນຍານຂອງສັນຍານຄໍາຄຶດຄໍາເຫັນກົງກັນກັບຄວາມໄວການອ້າງອີງໃນ. ຂັບ. ຂັ້ນຕອນຂ້າງລຸ່ມນີ້ສະແດງໃຫ້ເຫັນລໍາດັບຄະນະກໍາມະທີ່ແນະນໍາ, ສົມມຸດວ່າຕົວເຂົ້າລະຫັດຖືກເຊື່ອມຕໍ່ຢ່າງຖືກຕ້ອງກັບ Optidrive.
- ໃສ່ຕົວກໍານົດການຕໍ່ໄປນີ້ຈາກປ້າຍຊື່ມໍເຕີ:
- P1-07 – Motor Rated Voltage
- P1-08 – Motor Rated Current
- P1-09 – ຄວາມຖີ່ຂອງການໃຫ້ຄະແນນມໍເຕີ
- P1-10 – ຄວາມໄວການຈັດອັນດັບມໍເຕີ
- ເພື່ອເປີດໃຊ້ການເຂົ້າເຖິງພາລາມິເຕີຂັ້ນສູງທີ່ຕ້ອງການ, ຕັ້ງ P1-14 = 201
- ເລືອກຮູບແບບການຄວບຄຸມຄວາມໄວຂອງ vector ໂດຍການຕັ້ງຄ່າ P4-01 = 0
- ດໍາເນີນການ Auto-tune ໂດຍການຕັ້ງຄ່າ P4-02 = 1
- ເມື່ອ Auto-tune ສຳເລັດແລ້ວ, Optidrive ຄວນຖືກແລ່ນໄປໃນທິດທາງຂ້າງໜ້າດ້ວຍການອ້າງອີງຄວາມໄວຕ່ຳ (ເຊັ່ນ: 2 – 5Hz). ໃຫ້ແນ່ໃຈວ່າມໍເຕີເຮັດວຽກຢ່າງຖືກຕ້ອງແລະລຽບງ່າຍ.
- ກວດເບິ່ງຄ່າ Feedback ຕົວເຂົ້າລະຫັດໃນ P0-58. ດ້ວຍ Optidrive ແລ່ນໃນທິດທາງຂ້າງຫນ້າ, ມູນຄ່າຄວນຈະເປັນບວກ, ແລະມີຄວາມຫມັ້ນຄົງກັບການປ່ຽນແປງຂອງ + / – 5% ສູງສຸດ. ຖ້າຄ່າໃນພາລາມິເຕີນີ້ແມ່ນບວກ, ສາຍໄຟຕົວເຂົ້າລະຫັດແມ່ນຖືກຕ້ອງ. ຖ້າຄ່າເປັນຄ່າລົບ, ຄວາມໄວຄໍາຕິຊົມຈະຖືກປີ້ນ. ເພື່ອແກ້ໄຂອັນນີ້, ຫັນຊ່ອງສັນຍານ A ແລະ B ຈາກຕົວເຂົ້າລະຫັດ.
- ການປ່ຽນແປງຄວາມໄວຜົນຜະລິດຂອງໄດຄວນສົ່ງຜົນໃຫ້ມູນຄ່າຂອງ P0-58 ປ່ຽນແປງເພື່ອສະທ້ອນເຖິງການປ່ຽນແປງຂອງຄວາມໄວມໍເຕີຕົວຈິງ. ຖ້ານີ້ບໍ່ແມ່ນກໍລະນີ, ກວດເບິ່ງສາຍໄຟຂອງລະບົບທັງຫມົດ.
- ຖ້າການກວດສອບຂ້າງເທິງນີ້ຜ່ານ, ຟັງຊັນການຄວບຄຸມຄໍາຄຶດຄໍາເຫັນສາມາດຖືກເປີດໃຊ້ໂດຍການຕັ້ງຄ່າ P6-05 ເປັນ 1.
ຮັບປະກັນ
ເງື່ອນໄຂການຮັບປະກັນຄົບຖ້ວນແມ່ນມີໃຫ້ຕາມການຮ້ອງຂໍຈາກຜູ້ຈັດຈໍາໜ່າຍທີ່ໄດ້ຮັບອະນຸຍາດຈາກ IDL ຂອງທ່ານ.
Invertek Drives Ltd
Offa's Dyke Business Park
ເວນ
Powys, ອັງກິດ
SY21 8JF
www.invertekdrives.com
Optidrive Encoder Interface Module ຄູ່ມືຜູ້ໃຊ້
ລຸ້ນ 2.00
ເອກະສານ / ຊັບພະຍາກອນ
 |
Invertek Drives OPT-2-ENCOD-IN OPTIDRIVE ການໂຕ້ຕອບຕົວເຂົ້າລະຫັດ [pdf] ຄູ່ມືຜູ້ໃຊ້ OPT-2-ENCOD-IN, OPT-2-ENCHT, OPT-2-ENCOD-IN ສ່ວນຕິດຕໍ່ຕົວເຂົ້າລະຫັດແບບ OPTIDRIVE, OPT-2-ENCOD-IN, ການໂຕ້ຕອບຕົວເຂົ້າລະຫັດແບບ OPTIDRIVE, ການໂຕ້ຕອບຕົວເຂົ້າລະຫັດ, ການໂຕ້ຕອບ |