Invertek Drives OPT-2-ENCOD-IN OPTIDRIVE エンコーダ インターフェース

製品情報: OPTIDRIVE エンコーダー インターフェース
OPTIDRIVE エンコーダ インターフェースは、Optidrive P2 および Optidrive エレベーター ドライブで使用するために設計されたオプション モジュールです。LED ステータス表示により簡単に監視でき、さまざまなエンコーダ タイプと互換性があります。
LEDステータス表示
エンコーダー モジュールには、LED A (緑) と LED B (赤) の 2 つの LED があります。
- LED A(緑):エンコーダーの動作ステータスを示します。
- LED B (赤): エンコーダーの動作に関連する障害コードを示します。

障害コードはドライブのディスプレイに表示されます。エラー コードの定義を参照してください。一時的な障害の場合、モジュールの障害を通知するために LED が 50 ミリ秒間点灯し続けます。
エラーコードの定義
次のエラー コードはエンコーダー操作に関連しています。
互換性
OPTIDRIVE エンコーダ インターフェースは、次の製品範囲と互換性があります。
- Optidrive P2 (ODP-2-…. ドライブ)
- オプティドライブエレベーター(ODL-2-…ドライブ)
モデルコード
OPT-2-ENCOD-IN (5 ボルト TTL バージョン)
OPT-2-ENCHT (8~30 ボルト HTL バージョン)
互換性のあるエンコーダータイプ
TTL バージョン: 5V TTL – A および B チャンネル (補完付き)
HTLバージョン24V HTL – AおよびBチャンネル(補完付き)
注: +24V HTLエンコーダには外部電源電圧が必要ですtage
仕様
- 電源出力: 5V DC @ 200mA 最大
- 最大入力周波数: 500kHz
- 環境: 0°C – +50°C
- 端子トルク: 0.5Nm (4.5 Ib-in)
エラーコードの定義
OPTIDRIVE エンコーダ インターフェースには、エンコーダ操作に関連するエラー コードが表示される場合があります。障害コードはドライブ ディスプレイに表示されます。詳細については、ユーザー マニュアルの「エラー コードの定義」セクションを参照してください。
製品使用説明書
機械設備
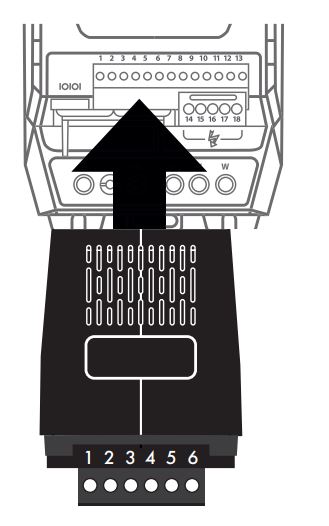
機械的に取り付ける場合は、次の手順に従ってください。
- オプション モジュールを Optidrive オプション モジュール ポートに挿入します。手順については、ユーザー マニュアルの図を参照してください。
- オプション モジュールをポートに挿入する際に過度の力が加わらないようにしてください。
- Optidrive の電源を入れる前に、オプション モジュールがしっかりと取り付けられていることを確認してください。
- 接続を締める前に、オプションモジュールから端子台ヘッダーを取り外します。配線が完了したら、端子台ヘッダーを元に戻します。
- 仕様セクションに記載されているトルク設定まで接続を締めます。
電気設備
電気設備を設置するには、次の手順に従ってください。
- 全体的にシールドされたツイストペアケーブルを使用してください。
- シールドを両端でアース (PE) に接続します。
- エンコーダ ケーブル シールドをドライブまたはエンコーダ モジュールの 0V に接続しないでください。
- 最低500mmの距離を保ってください。
- 全体シールド付きツイストペアケーブルを使用する
- シールドは両端ともアース(PE)に接続する必要があります
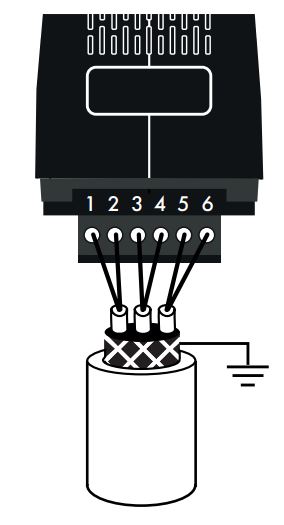
接続例ampレ
5V TTL エンコーダー – OPT-2-ENCOD-IN
24V HTL エンコーダー – OPT-2-ENCHT
あるいは(外部電源の代わりに)、ドライブのオンボード 24V 電源(T1(24V)および T7(0V))を使用することもできます。T1 からの合計電流消費が 100mA を超えないようにしてください。
注記 エンコーダの0Vも0V(T7)を駆動するために接続する必要があります。
注記 エンコーダ ケーブル シールドをドライブまたはエンコーダ モジュールの 0V に接続しないでください。
接続例についてはユーザーマニュアルを参照してくださいamplesとフォロー これらのメモ:
- エンコーダ ケーブル シールドがドライブまたはエンコーダ モジュールの 0V に接続されていないことを確認します。
- エンコーダの 0V は 0V (T7) を駆動するために接続する必要があります。
運用と試運転
試運転の際は、次の手順に従ってください。
- 最初はエンコーダレスベクトル速度制御 (P6-05 = 0) で Optidrive を試運転します。
- 速度と極性のチェックを実行して、フィードバック信号がドライブ内の速度基準と一致することを確認します。
コンプライアンス
Invertek Drives Ltd は、Optidrive エンコーダ インターフェース (モデル コード: OPT-2-ENCOD-IN および OPT-2-ENCHT) が指令 2014/30/EU、2014/35/EU、2011/65/EU に準拠していることを宣言します。EU 適合宣言は、Invertek Drives 販売パートナーにリクエストすると入手できます。
オプションモジュール接続
手術
パラメータ設定
エンコーダーを使用して操作する場合、最低限次のパラメータ設定が必要です。
- P1-09: モーターの定格周波数(モーターの銘板に記載)。
- P1-10: モーターの定格速度(モーターの銘板に記載)。
- P6-06: エンコーダー PPR 値 (接続されているエンコーダーの値を入力します)。
クローズドループベクトル速度は、ゼロ速度で完全なトルク保持機能を提供し、1Hz未満の周波数での動作を強化します。ドライブ、エンコーダモジュール、エンコーダは、ボリュームに従って接続する必要があります。tag配線図に示されているエンコーダの定格に従ってください。エンコーダ ケーブルは、両端のシールドがアースに接続された、全体的にシールドされたタイプである必要があります。
試運転
試運転の際には、まず Optidrive をエンコーダなしベクトル速度制御 (P6-05 = 0) で試運転し、速度/極性チェックを行って、フィードバック信号の符号がドライブの速度リファレンスの符号と一致することを確認する必要があります。以下の手順は、エンコーダが Optidrive に正しく接続されていることを前提とした、推奨される試運転シーケンスを示しています。
- モーターの銘板から次のパラメータを入力します。
- P1-07 – モーター定格電圧tage
- P1-08 – モーター定格電流
- P1-09 – モーター定格周波数
- P1-10 – モーター定格速度
- 必要な高度なパラメータへのアクセスを有効にするには、P1-14 = 201 を設定します。
- P4-01 = 0 に設定してベクトル速度制御モードを選択します。
- P4-02 = 1に設定して自動調整を実行します。
- 自動調整が完了したら、Optidrive を低速リファレンス (例: 2~5Hz) で順方向に実行します。モーターが正しくスムーズに動作することを確認します。
- P0-58 のエンコーダ フィードバック値を確認します。Optidrive が順方向に動作している場合、値は正で、最大 + / – 5% の変動で安定している必要があります。このパラメータの値が正の場合、エンコーダの配線は正しいです。値が負の場合、速度フィードバックが反転しています。これを修正するには、エンコーダからの A および B 信号チャネルを逆にします。
- ドライブ出力速度を変更すると、実際のモーター速度の変化を反映して P0-58 の値が変化するはずです。そうでない場合は、システム全体の配線を確認してください。
- 上記のチェックに合格した場合、P6-05 を 1 に設定することでフィードバック制御機能を有効にすることができます。
保証
完全な保証条件については、IDL 認定販売代理店にリクエストすると入手できます。
インバーテックドライブ株式会社
オファズ ダイク ビジネス パーク
ウェルシュプール
ポウイス、イギリス
SY21 8JF
ホームページ
Optidrive エンコーダ インターフェース モジュール ユーザー ガイド
バージョン 2.00
ドキュメント / リソース
 |
Invertek Drives OPT-2-ENCOD-IN OPTIDRIVE エンコーダ インターフェース [pdf] ユーザーガイド OPT-2-ENCOD-IN、OPT-2-ENCHT、OPT-2-ENCOD-IN OPTIDRIVE エンコーダ インターフェース、OPT-2-ENCOD-IN、OPTIDRIVE エンコーダ インターフェース、エンコーダ インターフェース、インターフェース |