![]()
Нова ера на мапирање и
решение за локализација

Упатство за употреба
Постабилна
Попрецизно
Помоќен
Шангај Slamtec Co., Ltd
Во текот наview
Aurora е иновативна фузија на LIDAR, визија, инерцијална навигација и технологии за длабоко учење развиени од SLAMTEC. Интегрира напредни сензори за перцепција за локализација и мапирање, нудејќи локализација од шест степени на слобода и за внатрешни и за надворешни 3D високопрецизни системи за мапирање, без потреба од надворешни зависности при стартување. Дополнително, Aurora доаѓа со сеопфатен синџир на алатки, вклучувајќи го софтверот за графички интерфејс RoboStudio и SDK алатки за секундарен развој, овозможувајќи им на корисниците брзо да креираат приспособени апликации и да го забрзаат распоредувањето на производите. Главните карактеристики на производот вклучуваат:
- Fusion LIDAR+ бинокуларен вид + IMU мулти-извор за фузија алгоритам, поддршка за надворешно проширување (GPS/RTK, километража, итн.)
- Обезбедете функции за 3D мапирање и локализација на внатрешни и надворешни работи
- Интегрирање на AI технологија за подобрување на способностите за 3D перцепција
- Со комплетен синџир на алатки, поддршка за проширување на апликацијата од страна на клиентот
- Стабилност на системот водечка во индустријата

1.1 Работен принцип и употреба
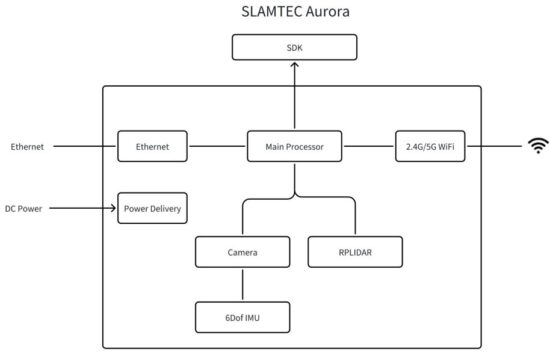
SLAMTEC Aurora го користи уникатниот SLAM алгоритам на фузија LIDAR-vision-IMU од Slamtec. Комбинирајќи визуелни и ласерски карактеристики, може да врши фузија на мапи на податоци повеќе од 10 пати во секунда и да извлече до еден милион квадратни метри податоци од картата. Системскиот дијаграм е прикажан подолу. Излезот на системот може да се дефинира како синџир на алатки за секундарен развој, вклучувајќи ги алатките за визуелна интеракција Robostudio, C++ sdk, JAVA sdk, Restful API sdk, ROS sdk итн.
Основно работење
2.1 Инсталација и проверка
- Напојување на опремата
- Модел на интерфејс: DC5521
- Влез волtage (струја): DC12V (2A)
- Се препорачува да се користи адаптер за напојување од 12V-2A за да се исполни нормалното напојување
- Се препорачува да се користи батерија со излезна јачинаtagе од 12 V и капацитет поголем од 5000 mAh, што може да го исполни нормалното напојување со траење на батеријата од повеќе од 2 часа
Ракување со функцискиот клуч
| Функција | Работа со копчиња | Статус на уредот |
| Во мирување | Долго притиснете го копчето за вклучување за да го ставите уредот во режим на подготвеност | Показното светло се гаси и уредот влегува во режим на подготвеност |
| Вклучете го | Откако уредот ќе влезе во режим на подготвеност, кратко притиснете за да влезете во режим на напојување | Показното светло се менува од црвено во жолто трепка, влегувајќи во иницијализацијата на уредот stage |
| Суспендирај | Кратко притиснете го копчето за пауза за да влезете во паузирана работна состојба на уредот. | Показното светло трепка зелено |
Опис на индикаторското светло
| Режим на трепкање на светлото на уредот | Опис |
| Црвената е секогаш светла | Вчитување |
| Жолто треперење | Подигнувањето е завршено, уредот влегува во фаза на иницијализација |
| Жолта долго светло | Иницијализацијата на системот е завршена, чекајќи да започне мапирањето |
| Зелената е секогаш светла | На работа |
| Црвено трепкање | Исклучок на уредот |
| Зелено трепка | Притиснете го копчето за пауза за да го паузирате уредот |
Опис на стратегијата на сцената
Aurora поддржува три режими на префрлување сцена. Корисниците можат да менуваат сцени според описот подолу за да го обезбедат ефектот на употреба. Системот стандардно ја користи политиката за внатрешни работи.
| Категорија на сцена | затворен | Голем_размер_затворен | на отворено |
| Карактеристики на сцената | Ласерското набљудување е релативно богато, и има многу слични сцени во околината, кои се склони до погрешно затворање проблем сцени |
Сцената е широка, и лесно е да се надмине опсегот на ласерско набљудување. Целокупното набљудување е релативно ретко, а околината е променлива |
Отворена, голема сцена, различен терен адаптациите постојат |
| Типично сценарио | Канцелариски згради, канцеларии, влада центри/медицински установи/хотели итн |
Големи паркинзи, трговски центри, метро станици, чекални, владини центри/медицински установи/хотелски лоби со големи области (радар надвор од опсегот на набљудување) итн |
Типични сцени на отворено, паркови, улици, тревници итн., некои затворени места, како кружни стадиони и гимназии, имаат поголема вкупна површина |
2.2 Поврзување на уредот и упатство
Подготвителна работа
а. Преземете Robostudio, далечински интерфејс
Ве молиме одете кај службеникот webсајт за преземање RoboStudio скалабилен софтвер за управување и развој на роботи | СЛАМТЕК , Remote UI е софтвер за графичка интеракција развиен од SLAMTEC, корисниците можат да го користат Robostudio за да воспостават врска со Aurora, за да постигнат следење на позиционирање на мапирање и конфигурација за поставување files и други функции
б. Поврзете ја рачката со Аурора и користете ја откако ќе се вклучи уредот
Основни операции
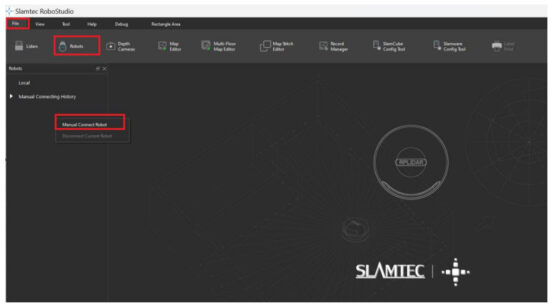
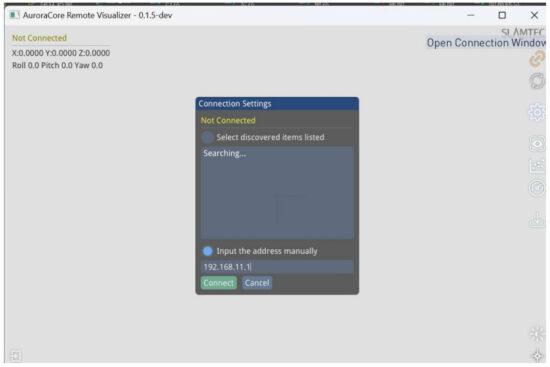
а. Стартувајте го RoboStudio Connect Device
б. Во скокачкиот прозорец, внесете ја IP 192.168.11.1 во лентата за IP адреса и кликнете на копчето „Поврзи“ за да го поврзете уредот
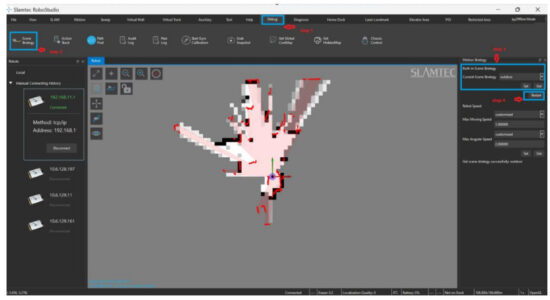
в. Пред да започнете со мапирање, користете повици на API или RoboStudio за да изберете соодветни стратегии (видете го горенаведениот опис на сценариото), а потоа започнете со тестирање за мапирање откако услугата ќе се рестартира. Специфичниот метод на поставување на RoboStudio
г. Иницијализација на Аурора
Пред да започне мапирањето, системот известува дека vslam се иницијализира и треба да се изврши операцијата за иницијализација на Aurora. Специфичната операција за иницијализација е како што следува:
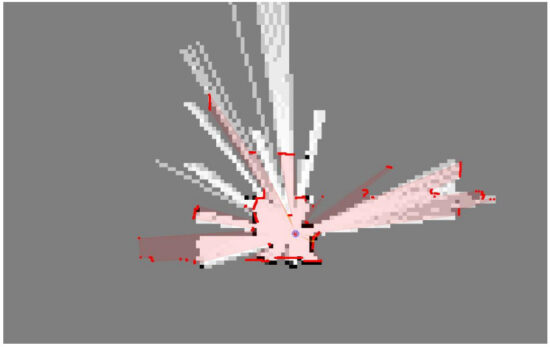
- Најдете област со очигледни карактеристики, свртете се кон неа, држете ја Аурора во приближно хоризонтална состојба на растојание од 2-3 m и започнете со иницијализирање.
- Чувајте го рачниот уред во мирување. Продолжете со оваа операција додека извичникот не исчезне од интерактивниот интерфејс. Започнете го формалниот процес на мапирање, како што е прикажано на сликата подолу.
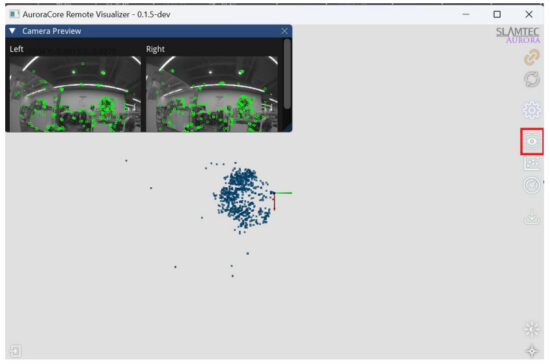
д. Користете го aurora_remote за да view точка облак, во скокачкиот прозорец, внесете ја IP 192.168.11.1 во лентата за IP адреса, а потоа кликнете на копчето „Поврзи“ за да го поврзете уредот
Кликнете на „Вклучи рамка View” на десната лента со алатки за прикажување на сликите и точките на карактеристики забележани од камерата
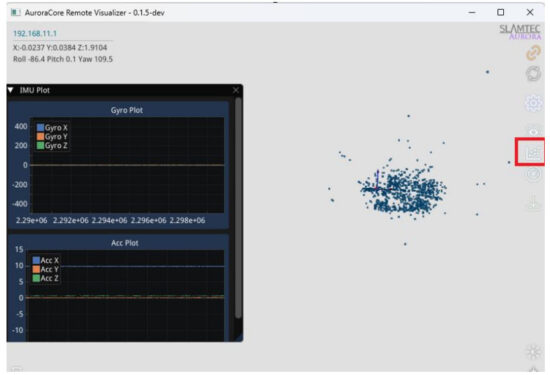
Кликнете „Вклучи IMU View” на десната лента со алатки за динамично прикажување на аголната брзина на жироскопот на тековната машина за тестирање и линеарното забрзување во трите оски (X, Y, Z) на тековната машина за тестирање
ѓ. Надградба на фирмверот
јас. Вклучете го уредот Аурора
ii. Поврзете го компјутерот со жариштето на Аурора или етернет
iii. Посетете го прелистувачот 192.168.11.1 и внесете ја следната страница
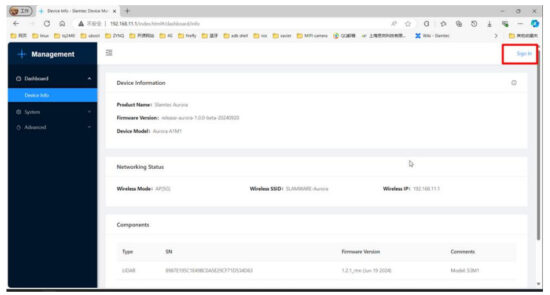
iv. Кликнете на „Најави се“ за да влезете на страницата за најавување
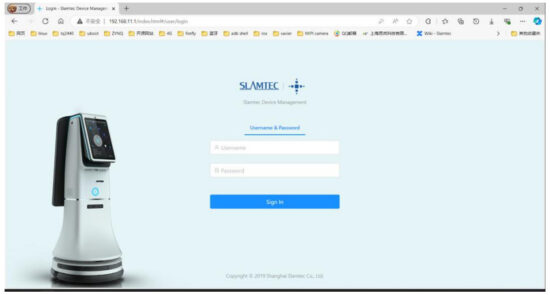
v. Внесете сметка и лозинка
vi. admin:admin111
vii. Кликнете на „Систем“ → „Ажурирање на фирмверот“ → „Избери File” за да го изберете надградениот фирмвер
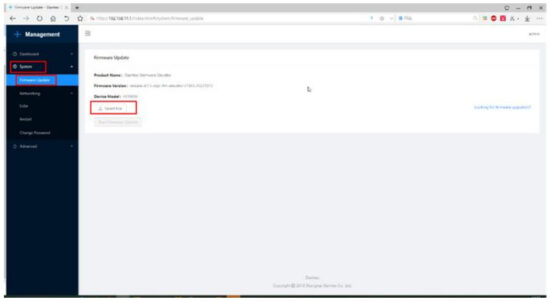
viii. Кликнете на „Start Firmware Update“ за да започнете со надградба на фирмверот.
ix. Почекајте да се појави „успех“ во дневникот за надградба, надградбата е завршена.
е. Користете SDK за секундарен развој
SLAMTEC Aurora обезбедува богат сет на алатки за SDK. Корисниците можат слободно да изберат соодветна алатка SDK за секундарен развој, вклучувајќи:
- C++ SDK
- JAVA SDK
- ROS SDK
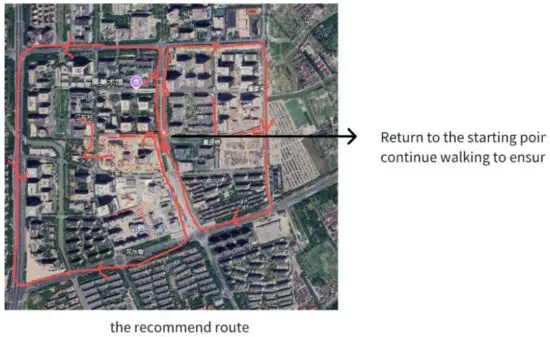
Предлози за планирање на маршрутата за типични сценарија
Вкупен принцип на маршрута на стекнување
➢ Обезбедете што е можно повеќе набљудувања за време на процесот на скенирање
➢ Обидете се да избегнувате скенирање нови области колку што е можно повеќе и земете одредена јамка
➢ Избегнувајте го ударот на динамичните објекти колку што е можно повеќе
➢ Одете колку што е можно повеќе јамки со затворена јамка
Забелешки:
- Ве молиме кликнете на копчето „Исчисти карта“ пред да се подготвите да креирате целосна нова карта, инаку не може да се гарантира дека моторот за оптимизација на мапирањето ќе стапи на сила
- Откако јамката ќе се врати на потеклото, држете го роботот да се движи и појдете повеќе патеки кои се преклопуваат. Не престанувајте веднаш да се движите
- Откако ќе се вратите на потеклото на јамката, ако картата не е затворена, продолжете да одите додека не се затвори
- За затворени области, избегнувајте да одите по стариот пат и намалете ја потрошувачката на меморија
- Во и надвор
Треба да влегувате и излегувате странично за да се осигурате дека ласерот и видот имаат заедничко view пред да внесете, и подобро поврзете ги податоците
Влегување и излегување од ограничен простор: По скенирање на ограничен простор, потребно е да се набљудува дали референтните објекти се доволни и дали структурните карактеристики се очигледни за време на процесот на скенирање.
Ако горенаведените два услови не се исполнети, обидете се да ги усогласите view кон добро структурирана област на карактеристики при излегување, притоа избегнувајќи какви било драстични промени во перспективата.
Белешки
Основни спецификации за употреба
➢ SLAMTEC Aurora е прецизна опрема. Паѓањето или ударот од надворешни сили може да предизвика оштетување на опремата, што резултира со ненормална работа или неточна точност, па дури и целосно оштетување на опремата
➢ Се препорачува да се користи мека сува крпа или само обезбедена крпа за чистење за чистење на опремата. Ве молиме чувајте ги деловите на радарот и леќите чисти и не допирајте ги директно со вашите раце
➢ Не покривајте или допирајте го делот од телото што ја дисипира топлината за време на употребата. Кога температурата на уредот е превисока за време на употребата, може да работи ненормално
Започнете ја фазата на иницијализација
➢ За време на фазата на иницијализација на стартувањето на опремата, неопходно е да се осигура дека опремата е стабилна и без тресење колку што е можно повеќе.
➢ За време на иницијализацијата, Аурора треба да цели на области со повеќе карактеристики, а растојанието треба да биде во рамките на 2-3 m, избегнувајќи средини со помалку карактеристики како што се отворени рамнини, рефрактивни средини како што се големи површини од стакло и области со подинамични објекти, со цел за да се обезбедат доволни карактеристики за иницијализација и да се добијат подобри резултати од податоците. Откако ќе останете во мирување 3 секунди и ќе чекате системот успешно да се иницијализира, почнете да го движите уредот и влезете во работна состојба
Фаза на работа на опремата
➢ Избегнувајте брза ротација на телото или ненадејни застанувања, што може да предизвика и опремата да доживее брзи и големи отклонувања и тресење, што до одреден степен ќе влијае на точноста и ефектот на мапирањето
➢ При скенирање, се препорачува да одите со нормална брзина на одење. За ситуации со помалку карактеристики, тесни простори, вртења итн., се препорачува да се забави
➢ При нормални услови на одење, опремата не треба да се навалува повеќе од 20 ° колку што е можно повеќе
➢ Кога скенирате внатрешни сцени кои вклучуваат повеќе соби или подови, ве молиме отворете ја внатрешната врата однапред. Кога поминувате низ вратата, скенирајте полека и останете на страната на вратата одредено време за да се уверите дека карактеристиките од двете страни на вратата можат да се скенираат истовремено. Ако вратата не е отворена за време на скенирањето, полека свртете се пред да се приближите до вратата, свртете го инструментот од вратата, свртете го грбот за да ја отворите вратата и полека влезете
Историја на ревизии
| Датум | Верзија | Опис |
| 10 | 1.0 | Почетна верзија |
![]()
Документи / ресурси
 |
Решение за мапирање и локализација на SLAMTEC Aurora [pdf] Упатство за користење Решение за мапирање и локализација на Аурора, решение за мапирање и локализација на Аурора, решение за локализација, решение |