![]()
Una nova era di mapping è
suluzione di localizazione

Manuale d'usu
Più stabile
Più Precisu
Più putente
Shanghai Slamtec Co., Ltd
Overview
Aurora hè una fusione innovativa di LIDAR, visione, navigazione inerziale è tecnulugia di apprendimentu profondu sviluppate da SLAMTEC. Integra sensori di percezione di localizazione avanzata è cartografia, chì offre una localizazione di sei gradi di libertà per i sistemi di cartografia 3D d'alta precisione interni è esterni, senza dipendenze esterne richieste à l'iniziu. Inoltre, Aurora vene cun una catena di strumenti cumpleta, cumpresu u software di interfaccia grafica RoboStudio è kit di strumenti SDK per u sviluppu secundariu, chì permettenu à l'utilizatori di creà rapidamente applicazioni persunalizati è accelerà l'implementazione di u produttu. E caratteristiche chjave di u pruduttu includenu:
- Fusion LIDAR + visione binoculare + algoritmu di fusione multi-fonte IMU, chì sustene l'espansione esterna (GPS/RTK, odometru, etc.)
- Fornite funzioni di mappatura 3D è di localizazione interni è esterni
- Integrazione di a tecnulugia AI per rinfurzà e capacità di percepzione 3D
- Cù una catena di strumenti cumpleta, supportu per l'espansione di l'applicazioni di u cliente
- Stabilità di u sistema di punta in l'industria

1.1 Principiu di travagliu è usu
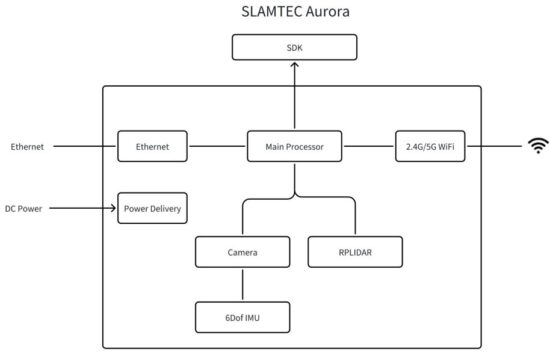
SLAMTEC Aurora usa l'algoritmu SLAM unicu di fusione LIDAR-vision-IMU da Slamtec. Cumminendu e caratteristiche visuale è laser, pò eseguisce a fusione di dati mape più di 10 volte per seconda è disegnà sin'à un milione di metri quadrati di dati di mappa. U schema di u sistema hè mostratu quì sottu. L'output di u sistema pò esse definitu cum'è una catena di strumenti per u sviluppu secundariu, cumprese l'arnesi d'interazzione visuale Robostudio, C++ sdk, JAVA sdk, Restful API sdk, ROS sdk, etc.
Funzionamentu basicu
2.1 Installazione è Inspeczione
- Alimentazione di l'equipaggiu
- Modellu d'interfaccia: DC5521
- Input voltage (corrente): DC12V (2A)
- Hè cunsigliatu d'utilizà un adattatore di alimentazione 12V-2A per risponde à l'alimentazione normale
- Hè ricumandemu di utilizà una bateria cù un volume di outputtage di 12V è una capacità più grande di 5000mAh, chì ponu scuntrà l'alimentazione normale cù una vita di a bateria di più di 2 ore
Funzionamentu chjave di funzione
| Funzione | U funziunamentu di u buttone | Statu di u dispusitivu |
| Esse prontu à | Appughjà longu u buttone di putenza per mette u dispusitivu in modalità standby | L'indicatore luminoso si spegne è u dispusitivu entra in modalità standby |
| Power on | Dopu chì u dispusitivu entre in modalità standby, pressa breve per entre in u modu di putenza | L'indicatore luminosu cambia da rossu à giallu lampendu, entra in l'inizializazione di u dispusitivu stage |
| Suspende | Appughjà brevemente u buttone di pausa per entre in u statu di travagliu in pausa di u dispusitivu. | L'indicatore luminoso lampeggia in verde |
Descrizzione di l'indicatore luminoso
| Modu lampeggiante di u dispusitivu | Descrizzione |
| Rossu hè sempre luminoso | Booting up |
| Scintilla gialla | Boot cumpletu, u dispusitivu entra in a fase di inizializazione |
| Giallu longu luminosu | L'inizializazione di u sistema hè finita, aspittendu per inizià a mappatura |
| U verde hè sempre luminoso | À u travagliu |
| Rossu lampendu | Eccezzioni di u dispositivu |
| Verde lampeggiante | Appughjà u buttone di pausa per mette in pausa u dispusitivu |
Descrizzione di a strategia di scena
Aurora supporta trè modi di cambiamentu di scena. L'utilizatori ponu cambià di scena secondu a descrizzione sottu per assicurà l'effettu di l'usu. U sistema predeterminatu per aduprà a pulitica interna.
| Categoria di scena | internu | Grande_scala_interna | fora |
| Funzioni di scena | L'osservazione laser hè relativamente ricca, è ci sò parechje sceni simili in l'ambiente, chì sò propensi à sceni di prublema di chiusura erronee |
A scena hè larga, è hè faciule supera a gamma di osservazione laser. L'osservazione generale hè relativamente sparsa, è l'ambiente hè cambiante |
Apertu, grande spaziu di scena, terrenu variu adattazioni esistenu |
| Scenariu tipicu | Edifici d'uffiziu, uffizii, guvernu centri / istituzioni mediche / alberghi, etc |
Grandi parcheggi, centri commerciali, stazioni di metro, sale d'attesa, centri di guvernu / istituzioni mediche / lobbies di l'hotel cù grandi zone (radar oltre l'area di osservazione), ecc |
Scene tipiche all'aperto, parchi, strade, prati, etc., certi locali interni, cum'è stadii circulari è gimnasi, anu una zona generale più grande. |
2.2 Cunnessione Dispositivu è Tutorial
Travagliu di preparazione
a. Scaricate Robostudio, Remote UI
Per piacè andate à l'ufficiale websitu per scaricà RoboStudio scalable robot management è u prugrammu di sviluppu | SLAMTEC , Remote UI hè un software d'interazione grafica sviluppatu da SLAMTEC, l'utilizatori ponu utilizà Robostudio per stabilisce una cunnessione cù Aurora, per ottene u monitoraghju di u posizionamentu di mappa è a cunfigurazione di carica. files è altre funzioni
b. Cunnette vi u manicu à Aurora è aduprà dopu à u dispusitivu hè powered on
Operazioni basi
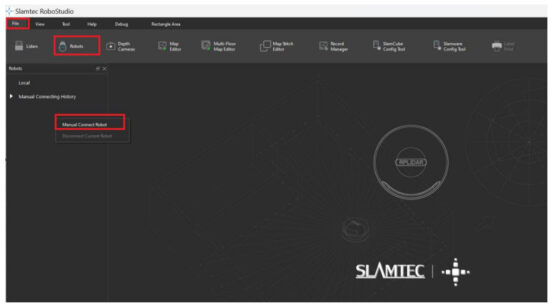
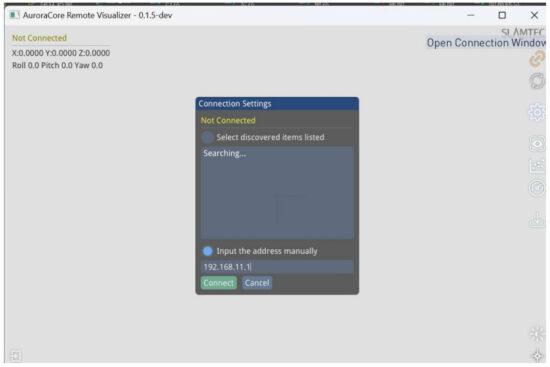
a. Avviate u Dispositivu RoboStudio Connect
b. In a finestra pop-up, inserite l'IP 192.168.11.1 in a barra di l'indirizzu IP è cliccate nantu à u buttone "Connect" per cunnette u dispusitivu.
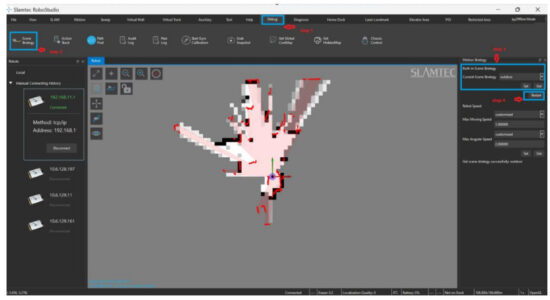
c. Prima di inizià a mappatura, aduprate e chjama API o RoboStudio per selezziunà strategie adatte (consultate a descrizzione di u scenariu sopra), è poi cuminciate a prova di mappatura dopu chì u serviziu riavvia. U metudu di cunfigurazione specificu di RoboStudio
d. Inizializazione Aurora
Prima di inizià a mappatura, u sistema informa chì vslam hè inizializatu, è l'operazione di inizializazione Aurora deve esse realizatu. L'operazione di inizializazione specifica hè a siguenti:
- Truvate una zona cù caratteristiche evidenti, affruntate, mantene l'Aurora in un statu approssimativamente horizontale à una distanza di 2-3m, è cuminciate l'inizializazione.
- Mantene u dispositivu portatile fermu. Cuntinuà sta operazione finu à chì u segnu d'esclamazione sparisce da l'interfaccia interattiva. Cumincià u prucessu di mapping formale, cum'è mostra in a figura sottu.
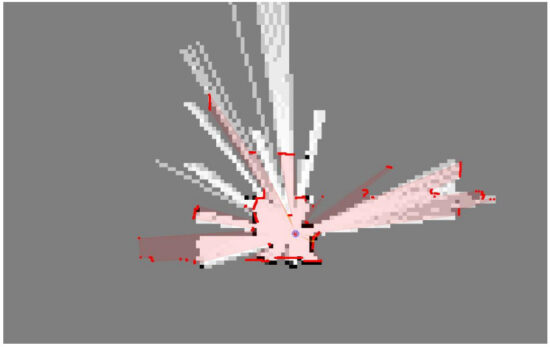
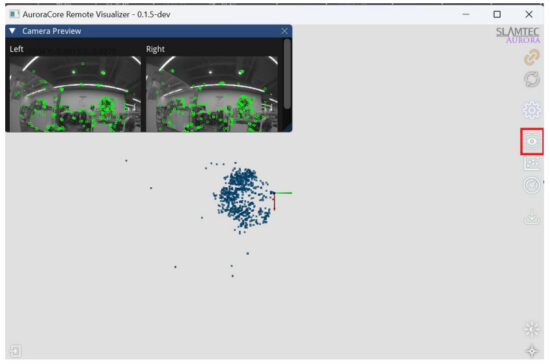
e. Aduprate l'aurora_remote per view nuvola di punti, in a finestra pop-up, entre l'IP 192.168.11.1 in a barra di l'indirizzu IP, è dopu cliccate nantu à u buttone "Connect" per cunnette u dispusitivu.
Cliccate "Toggle Frame View" nantu à a barra di strumenti dritta per vede l'imaghjini è i punti di caratteristiche osservati da a camera
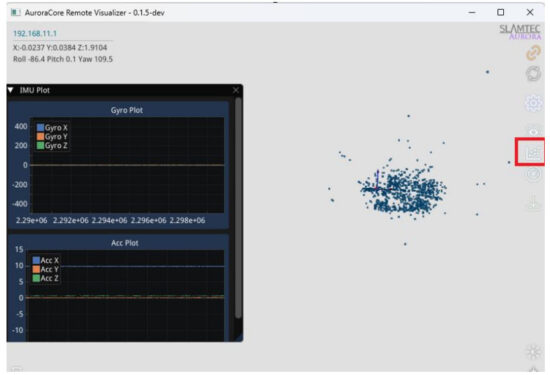
Cliccate "Toggle IMU View" nantu à a barra di strumenti dritta per visualizà dinamicamente a velocità angulare di u Giroscopiu di a macchina di prova attuale è l'accelerazione lineare in i trè assi (X, Y, Z) di a macchina di prova attuale.
f. Actualizazione di u firmware
i. Accende u dispusitivu Aurora
ii. Cunnette l'urdinatore à Aurora hotspot o Ethernet
iii. Visita u navigatore 192.168.11.1 è entre in a pagina seguente
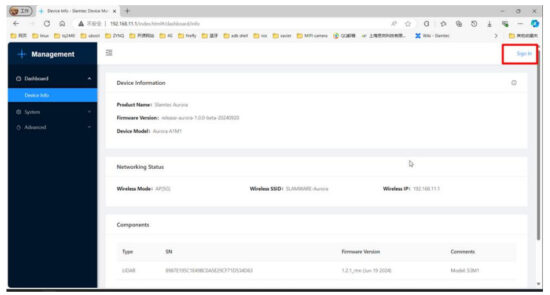
iv. Cliccate "Sign in" per entre in a pagina di login
v. Entre contu è password
vi. amministratore: admin111
vii. Cliccate "Sistema" → "Firmware Update" → "Select File” per selezziunà u firmware aghjurnatu
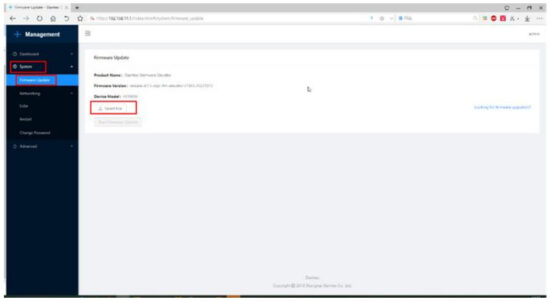
viii. Cliccate "Start Firmware Update" per cumincià à aghjurnà u firmware.
ix. Aspettate chì "successu" apparisce in u logu di l'aghjurnamentu, l'aghjurnamentu hè cumpletu.
g. Aduprate SDK per u sviluppu secundariu
SLAMTEC Aurora furnisce un riccu set di strumenti SDK. L'utilizatori ponu sceglie liberamente u strumentu SDK adattatu per u sviluppu secundariu, cumprese:
- C++ SDK
- JAVA SDK
- ROS SDK
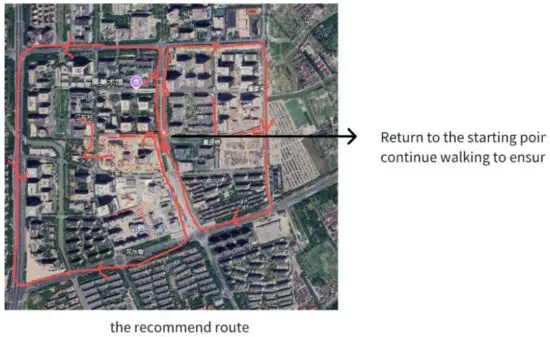
Suggerimenti tipici di pianificazione di rotte di scenariu
Principiu generale di a strada di acquisizione
➢ Assicurà quante osservazioni pussibule durante u prucessu di scanning
➢ Pruvate di evità di scansà novi spazii quant'è pussibule è pigliate un certu ciclu
➢ Evite l'impattu di l'uggetti dinamichi quantu pussibule
➢ Camminate quant'è più circuiti chjusi pussibule
Note:
- Per piacè cliccate nant'à u buttone "Clear Map" prima di preparà per creà una nova mappa cumpleta, altrimenti u mutore di ottimisazione di a mappa ùn pò esse garantita per esse effettu.
- Dopu chì u ciclu torna à l'origine, mantene u robot in muvimentu è pigliate più strade sovrapposte. Ùn fermate micca di muvimenti immediatamente
- Dopu à vultà à l'urìgine di u ciclu, se a mappa ùn hè micca chjusa, cuntinueghja à marchjà finu à ch'ella hè chjusa
- Per i zoni chjusi, evite micca di piglià a vechja strada è riduce u cunsumu di memoria
- Dentru è fora
Avete bisognu di entre è esce da u latu per assicurà chì u laser è a visione anu un cumuni view prima di entre, è megliu cunnette i dati
Ingressu è esce da un spaziu cunfinatu: Dopu à scanning un spaziu cunfinatu, hè necessariu osservà se l'uggetti di riferimentu sò abbastanza è se e caratteristiche strutturali sò evidenti durante u prucessu di scanning.
Se i dui cundizioni sopra ùn sò micca scontri, pruvate d'allineà view versu una zona di caratteristiche ben strutturata quandu esce, evitendu ogni cambiamentu drasticu di perspettiva.
Notes
Specificazioni basi di usu
➢ SLAMTEC Aurora hè un equipamentu di precisione. Cascà o esse colpitu da e forze esterne pò causà danni à l'equipaggiu, risultatu in un travagliu anormale o precisione imprecisa, o ancu danni cumpleti à l'equipaggiu.
➢ Hè cunsigliatu d'utilizà un pannu suave seccu o un pannu di pulizia auto-furnitu per pulisce l'equipaggiu. Per piacè mantene e parti di radar è lenti pulite è ùn li tocca micca direttamente cù e vostre mani
➢ Ùn copre o toccu a parte di dissipazione di u calore di u corpu durante l'usu. Quandu a temperatura di u dispusitivu hè troppu alta durante l'usu, pò travaglià anormalmente
Cumincià a fase di inizializazione
➢ Durante a fase di inizializazione di l'iniziu di l'equipaggiu, hè necessariu di assicurà chì l'equipaggiu hè stabile è liberu di scuzzulate quantu pussibule.
➢ Durante l'inizializazione, Aurora duveria mira à e zoni cù più caratteristiche, è a distanza deve esse in 2-3m, evitendu ambienti cù menu caratteristiche, cum'è pianure aperte, ambienti refrattivi cum'è grandi spazii di vetru, è zoni cù oggetti più dinamichi, in ordine. per assicurà e caratteristiche di inizializazione abbastanza è ottene risultati di dati megliu. Dopu à esse fermu per 3 seconde è aspittendu chì u sistema sia inizializatu bè, cuminciate à spustà u dispusitivu è entra in u statu di travagliu.
Fase di travagliu di l'equipaggiu
➢ Evite a rotazione rapida di u corpu o l'arresti bruschi, chì ponu pruvucà l'equipaggiu à sperimentà ancu una deformazione rapida è grande è tremuli, chì affettanu a precisione è l'effettu di a mappa in una certa misura.
➢ Durante a scansione, hè cunsigliatu di marchjà à una velocità normale di caminata. Per situazioni cù menu caratteristiche, spazii stretti, giri, etc., hè cunsigliatu di rallentà
➢ In cundizioni normali di caminata, l'equipaggiu ùn deve micca inclinatu più di 20 ° quantu pussibule
➢ Quandu scansate scene interni chì implicanu parechje stanze o piani, per piacè apre a porta interna in anticipu. Quandu passa per a porta, scansate lentamente è stà nantu à u latu di a porta per un periudu di tempu per assicurà chì e funzioni di i dui lati di a porta ponu esse scansate à u stessu tempu. Se a porta ùn hè micca aperta durante a scansione, vultate lentamente prima di avvicinà a porta, alluntanate u strumentu da a porta, girate u spalle per apre a porta, è entra lentamente.
Storia di rivisione
| Data | Versione | Descrizzione |
| 10/11/2024 | 1.0 | Versione iniziale |
![]()
Documenti / Risorse
 |
SLAMTEC Aurora Mapping and Localization Solution [pdfManuale d'usu Aurora Soluzione di Mappatura è Localizazione, Aurora, Soluzione di Mappatura è Localizazione, Soluzione di Localizazione, Soluzione |