![]()
ಮ್ಯಾಪಿಂಗ್ನ ಹೊಸ ಯುಗ ಮತ್ತು
ಸ್ಥಳೀಕರಣ ಪರಿಹಾರ

ಬಳಕೆದಾರ ಕೈಪಿಡಿ
ಹೆಚ್ಚು ಸ್ಥಿರ
ಹೆಚ್ಚು ನಿಖರ
ಹೆಚ್ಚು ಶಕ್ತಿಶಾಲಿ
ಶಾಂಘೈ Slamtec Co., Ltd
ಮುಗಿದಿದೆview
ಅರೋರಾ ಎಂಬುದು LIDAR, ದೃಷ್ಟಿ, ಜಡತ್ವ ಸಂಚರಣೆ ಮತ್ತು SLAMTEC ಅಭಿವೃದ್ಧಿಪಡಿಸಿದ ಆಳವಾದ ಕಲಿಕೆಯ ತಂತ್ರಜ್ಞಾನಗಳ ನವೀನ ಸಮ್ಮಿಳನವಾಗಿದೆ. ಇದು ಸುಧಾರಿತ ಸ್ಥಳೀಕರಣ ಮತ್ತು ಮ್ಯಾಪಿಂಗ್ ಗ್ರಹಿಕೆ ಸಂವೇದಕಗಳನ್ನು ಸಂಯೋಜಿಸುತ್ತದೆ, ಪ್ರಾರಂಭದಲ್ಲಿ ಯಾವುದೇ ಬಾಹ್ಯ ಅವಲಂಬನೆಗಳ ಅಗತ್ಯವಿಲ್ಲದೇ, ಒಳಾಂಗಣ ಮತ್ತು ಹೊರಾಂಗಣ 3D ಉನ್ನತ-ನಿಖರ ಮ್ಯಾಪಿಂಗ್ ವ್ಯವಸ್ಥೆಗಳಿಗೆ ಆರು-ಡಿಗ್ರಿ-ಸ್ವಾತಂತ್ರ್ಯದ ಸ್ಥಳೀಕರಣವನ್ನು ನೀಡುತ್ತದೆ. ಹೆಚ್ಚುವರಿಯಾಗಿ, ಅರೋರಾ ಗ್ರಾಫಿಕಲ್ ಇಂಟರ್ಫೇಸ್ ಸಾಫ್ಟ್ವೇರ್ RoboStudio ಮತ್ತು ದ್ವಿತೀಯ ಅಭಿವೃದ್ಧಿಗಾಗಿ SDK ಟೂಲ್ಕಿಟ್ಗಳನ್ನು ಒಳಗೊಂಡಂತೆ ಸಮಗ್ರ ಟೂಲ್ಚೈನ್ನೊಂದಿಗೆ ಬರುತ್ತದೆ, ಬಳಕೆದಾರರು ತ್ವರಿತವಾಗಿ ಕಸ್ಟಮೈಸ್ ಮಾಡಿದ ಅಪ್ಲಿಕೇಶನ್ಗಳನ್ನು ರಚಿಸಲು ಮತ್ತು ಉತ್ಪನ್ನ ನಿಯೋಜನೆಯನ್ನು ವೇಗಗೊಳಿಸಲು ಅನುವು ಮಾಡಿಕೊಡುತ್ತದೆ. ಉತ್ಪನ್ನದ ಪ್ರಮುಖ ಲಕ್ಷಣಗಳು ಸೇರಿವೆ:
- ಫ್ಯೂಷನ್ LIDAR+ ಬೈನಾಕ್ಯುಲರ್ ವಿಷನ್ + IMU ಮಲ್ಟಿ-ಸೋರ್ಸ್ ಫ್ಯೂಷನ್ ಅಲ್ಗಾರಿದಮ್, ಬಾಹ್ಯ ವಿಸ್ತರಣೆಯನ್ನು ಬೆಂಬಲಿಸುತ್ತದೆ (GPS/RTK, ಓಡೋಮೀಟರ್, ಇತ್ಯಾದಿ.)
- ಒಳಾಂಗಣ ಮತ್ತು ಹೊರಾಂಗಣ 3D ಮ್ಯಾಪಿಂಗ್ ಮತ್ತು ಸ್ಥಳೀಕರಣ ಕಾರ್ಯಗಳನ್ನು ಒದಗಿಸಿ
- 3D ಗ್ರಹಿಕೆ ಸಾಮರ್ಥ್ಯಗಳನ್ನು ಹೆಚ್ಚಿಸಲು AI ತಂತ್ರಜ್ಞಾನವನ್ನು ಸಂಯೋಜಿಸುವುದು
- ಸಂಪೂರ್ಣ ಟೂಲ್ಚೈನ್ನೊಂದಿಗೆ, ಕ್ಲೈಂಟ್-ಸೈಡ್ ಅಪ್ಲಿಕೇಶನ್ ವಿಸ್ತರಣೆಗೆ ಬೆಂಬಲ
- ಉದ್ಯಮ-ಪ್ರಮುಖ ವ್ಯವಸ್ಥೆಯ ಸ್ಥಿರತೆ

1.1 ಕೆಲಸದ ತತ್ವ ಮತ್ತು ಬಳಕೆ
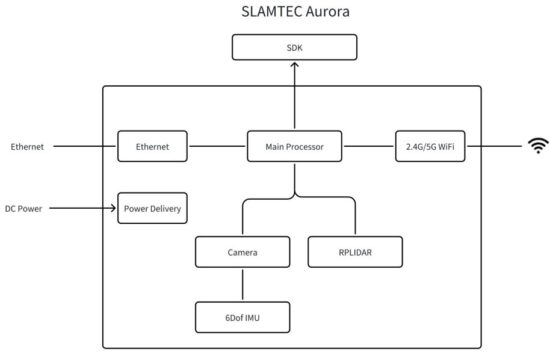
SLAMTEC ಅರೋರಾ Slamtec ನಿಂದ LIDAR-vision-IMU ಸಮ್ಮಿಳನದ ಅನನ್ಯ SLAM ಅಲ್ಗಾರಿದಮ್ ಅನ್ನು ಬಳಸುತ್ತದೆ. ದೃಶ್ಯ ಮತ್ತು ಲೇಸರ್ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಒಟ್ಟುಗೂಡಿಸಿ, ಇದು ಪ್ರತಿ ಸೆಕೆಂಡಿಗೆ 10 ಕ್ಕಿಂತ ಹೆಚ್ಚು ಬಾರಿ ಡೇಟಾ ಸಮ್ಮಿಳನವನ್ನು ನಿರ್ವಹಿಸುತ್ತದೆ ಮತ್ತು ನಕ್ಷೆಯ ಡೇಟಾವನ್ನು ಒಂದು ಮಿಲಿಯನ್ ಚದರ ಮೀಟರ್ಗಳವರೆಗೆ ಸೆಳೆಯುತ್ತದೆ. ಸಿಸ್ಟಮ್ ರೇಖಾಚಿತ್ರವನ್ನು ಕೆಳಗೆ ತೋರಿಸಲಾಗಿದೆ. ದೃಶ್ಯ ಸಂವಹನ ಸಾಧನಗಳಾದ Robostudio, C++ sdk, JAVA sdk, Restful API sdk, ROS sdk, ಇತ್ಯಾದಿಗಳನ್ನು ಒಳಗೊಂಡಂತೆ ಸಿಸ್ಟಂನ ಔಟ್ಪುಟ್ ಅನ್ನು ದ್ವಿತೀಯ ಅಭಿವೃದ್ಧಿಗಾಗಿ ಟೂಲ್ಚೈನ್ ಎಂದು ವ್ಯಾಖ್ಯಾನಿಸಬಹುದು.
ಮೂಲ ಕಾರ್ಯಾಚರಣೆ
2.1 ಅನುಸ್ಥಾಪನೆ ಮತ್ತು ತಪಾಸಣೆ
- ಸಲಕರಣೆ ವಿದ್ಯುತ್ ಸರಬರಾಜು
- ಇಂಟರ್ಫೇಸ್ ಮಾದರಿ: DC5521
- ಇನ್ಪುಟ್ ಸಂಪುಟtagಇ (ಪ್ರಸ್ತುತ): DC12V (2A)
- ಸಾಮಾನ್ಯ ವಿದ್ಯುತ್ ಪೂರೈಕೆಯನ್ನು ಪೂರೈಸಲು 12V-2A ಪವರ್ ಅಡಾಪ್ಟರ್ ಅನ್ನು ಬಳಸಲು ಶಿಫಾರಸು ಮಾಡಲಾಗಿದೆ
- ಔಟ್ಪುಟ್ ವಾಲ್ಯೂಮ್ನೊಂದಿಗೆ ಬ್ಯಾಟರಿಯನ್ನು ಬಳಸಲು ಶಿಫಾರಸು ಮಾಡಲಾಗಿದೆtage 12V ಮತ್ತು 5000mAh ಗಿಂತ ಹೆಚ್ಚಿನ ಸಾಮರ್ಥ್ಯ, ಇದು 2 ಗಂಟೆಗಳಿಗಿಂತ ಹೆಚ್ಚಿನ ಬ್ಯಾಟರಿ ಅವಧಿಯೊಂದಿಗೆ ಸಾಮಾನ್ಯ ವಿದ್ಯುತ್ ಪೂರೈಕೆಯನ್ನು ಪೂರೈಸುತ್ತದೆ
ಫಂಕ್ಷನ್ ಕೀ ಕಾರ್ಯಾಚರಣೆ
| ಕಾರ್ಯ | ಬಟನ್ ಕಾರ್ಯಾಚರಣೆ | ಸಾಧನದ ಸ್ಥಿತಿ |
| ಸ್ಟ್ಯಾಂಡ್ಬೈ | ಸಾಧನವನ್ನು ಸ್ಟ್ಯಾಂಡ್ಬೈ ಮೋಡ್ಗೆ ಹಾಕಲು ಪವರ್ ಬಟನ್ ಅನ್ನು ದೀರ್ಘಕಾಲ ಒತ್ತಿರಿ | ಸೂಚಕ ಬೆಳಕು ಹೊರಹೋಗುತ್ತದೆ ಮತ್ತು ಸಾಧನವು ಸ್ಟ್ಯಾಂಡ್ಬೈ ಮೋಡ್ಗೆ ಪ್ರವೇಶಿಸುತ್ತದೆ |
| ಪವರ್ ಆನ್ | ಸಾಧನವು ಸ್ಟ್ಯಾಂಡ್ಬೈ ಮೋಡ್ಗೆ ಪ್ರವೇಶಿಸಿದ ನಂತರ, ಪವರ್ ಮೋಡ್ಗೆ ಪ್ರವೇಶಿಸಲು ಶಾರ್ಟ್ ಪ್ರೆಸ್ ಮಾಡಿ | ಸೂಚಕ ಬೆಳಕು ಕೆಂಪು ಬಣ್ಣದಿಂದ ಹಳದಿ ಮಿನುಗುವಿಕೆಗೆ ಬದಲಾಗುತ್ತದೆ, ಸಾಧನದ ಪ್ರಾರಂಭವನ್ನು ಪ್ರವೇಶಿಸುತ್ತದೆ ರುtage |
| ಅಮಾನತುಗೊಳಿಸಿ | ಸಾಧನದ ವಿರಾಮಗೊಳಿಸಿದ ಕೆಲಸದ ಸ್ಥಿತಿಯನ್ನು ನಮೂದಿಸಲು ವಿರಾಮ ಬಟನ್ ಅನ್ನು ಚಿಕ್ಕದಾಗಿ ಒತ್ತಿರಿ. | ಸೂಚಕ ಬೆಳಕು ಹಸಿರು ಹೊಳೆಯುತ್ತದೆ |
ಸೂಚಕ ಬೆಳಕಿನ ವಿವರಣೆ
| ಸಾಧನ ಬೆಳಕಿನ ಮಿನುಗುವ ಮೋಡ್ | ವಿವರಣೆ |
| ಕೆಂಪು ಯಾವಾಗಲೂ ಪ್ರಕಾಶಮಾನವಾಗಿರುತ್ತದೆ | ಬೂಟ್ ಮಾಡಲಾಗುತ್ತಿದೆ |
| ಹಳದಿ ಫ್ಲಿಕ್ಕರ್ | ಬೂಟ್ ಪೂರ್ಣಗೊಂಡಿದೆ, ಸಾಧನವು ಆರಂಭಿಕ ಹಂತವನ್ನು ಪ್ರವೇಶಿಸುತ್ತದೆ |
| ಹಳದಿ ಉದ್ದ ಪ್ರಕಾಶಮಾನ | ಸಿಸ್ಟಂ ಆರಂಭಿಸುವಿಕೆ ಪೂರ್ಣಗೊಂಡಿದೆ, ಮ್ಯಾಪಿಂಗ್ ಪ್ರಾರಂಭಿಸಲು ಕಾಯುತ್ತಿದೆ |
| ಹಸಿರು ಯಾವಾಗಲೂ ಪ್ರಕಾಶಮಾನವಾಗಿರುತ್ತದೆ | ಕೆಲಸದಲ್ಲಿ |
| ಕೆಂಪು ಮಿನುಗುವಿಕೆ | ಸಾಧನ ವಿನಾಯಿತಿ |
| ಹಸಿರು ಮಿನುಗುತ್ತಿದೆ | ಸಾಧನವನ್ನು ವಿರಾಮಗೊಳಿಸಲು ವಿರಾಮ ಬಟನ್ ಅನ್ನು ಒತ್ತಿರಿ |
ದೃಶ್ಯ ತಂತ್ರದ ವಿವರಣೆ
ಅರೋರಾ ಮೂರು ದೃಶ್ಯ ಸ್ವಿಚಿಂಗ್ ಮೋಡ್ಗಳನ್ನು ಬೆಂಬಲಿಸುತ್ತದೆ. ಬಳಕೆಯ ಪರಿಣಾಮವನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು ಬಳಕೆದಾರರು ಕೆಳಗಿನ ವಿವರಣೆಯ ಪ್ರಕಾರ ದೃಶ್ಯಗಳನ್ನು ಬದಲಾಯಿಸಬಹುದು. ಒಳಾಂಗಣ ನೀತಿಯನ್ನು ಬಳಸಲು ಸಿಸ್ಟಮ್ ಡಿಫಾಲ್ಟ್ ಆಗಿದೆ.
| ದೃಶ್ಯ ವರ್ಗ | ಒಳಾಂಗಣ | ದೊಡ್ಡ_ಪ್ರಮಾಣದ_ಒಳಾಂಗಣ | ಹೊರಾಂಗಣ |
| ದೃಶ್ಯ ವೈಶಿಷ್ಟ್ಯಗಳು | ಲೇಸರ್ ವೀಕ್ಷಣೆಯು ತುಲನಾತ್ಮಕವಾಗಿ ಶ್ರೀಮಂತವಾಗಿದೆ, ಮತ್ತು ಪರಿಸರದಲ್ಲಿ ಅನೇಕ ರೀತಿಯ ದೃಶ್ಯಗಳಿವೆ, ಅವುಗಳು ಪೀಡಿತವಾಗಿವೆ ತಪ್ಪಾದ ಮುಚ್ಚುವಿಕೆಯ ಸಮಸ್ಯೆಯ ದೃಶ್ಯಗಳಿಗೆ |
ದೃಶ್ಯವು ವಿಶಾಲವಾಗಿದೆ ಮತ್ತು ಇದು ಸುಲಭವಾಗಿದೆ ಲೇಸರ್ ವೀಕ್ಷಣಾ ವ್ಯಾಪ್ತಿಯನ್ನು ಮೀರುತ್ತದೆ. ಒಟ್ಟಾರೆ ವೀಕ್ಷಣೆ ತುಲನಾತ್ಮಕವಾಗಿ ವಿರಳವಾಗಿದೆ ಮತ್ತು ಪರಿಸರವು ಬದಲಾಗಬಲ್ಲದು |
ತೆರೆದ, ದೊಡ್ಡ ದೃಶ್ಯ ಪ್ರದೇಶ, ವಿವಿಧ ಭೂಪ್ರದೇಶ ರೂಪಾಂತರಗಳು ಅಸ್ತಿತ್ವದಲ್ಲಿವೆ |
| ವಿಶಿಷ್ಟ ಸನ್ನಿವೇಶ | ಕಚೇರಿ ಕಟ್ಟಡಗಳು, ಕಚೇರಿಗಳು, ಸರ್ಕಾರ ಕೇಂದ್ರಗಳು/ವೈದ್ಯಕೀಯ ಸಂಸ್ಥೆಗಳು/ಹೋಟೆಲ್ಗಳು, ಇತ್ಯಾದಿ |
ದೊಡ್ಡ ಪಾರ್ಕಿಂಗ್ ಸ್ಥಳಗಳು, ಶಾಪಿಂಗ್ ಮಾಲ್ಗಳು, ಸುರಂಗಮಾರ್ಗ ನಿಲ್ದಾಣಗಳು, ಕಾಯುವ ಕೋಣೆಗಳು, ದೊಡ್ಡ ಸರ್ಕಾರಿ ಕೇಂದ್ರಗಳು/ವೈದ್ಯಕೀಯ ಸಂಸ್ಥೆಗಳು/ಹೋಟೆಲ್ ಲಾಬಿಗಳು ಪ್ರದೇಶಗಳು (ವೀಕ್ಷಣೆಯ ವ್ಯಾಪ್ತಿಯನ್ನು ಮೀರಿದ ರಾಡಾರ್), ಇತ್ಯಾದಿ |
ವಿಶಿಷ್ಟವಾದ ಹೊರಾಂಗಣ ದೃಶ್ಯಗಳು, ಉದ್ಯಾನವನಗಳು, ಬೀದಿಗಳು, ಹುಲ್ಲುಹಾಸುಗಳು, ಇತ್ಯಾದಿ, ವೃತ್ತಾಕಾರದ ಕ್ರೀಡಾಂಗಣಗಳು ಮತ್ತು ಜಿಮ್ನಾಷಿಯಂಗಳಂತಹ ಕೆಲವು ಒಳಾಂಗಣ ಸ್ಥಳಗಳು, ದೊಡ್ಡ ಒಟ್ಟಾರೆ ಪ್ರದೇಶವನ್ನು ಹೊಂದಿವೆ. |
2.2 ಸಾಧನ ಸಂಪರ್ಕ ಮತ್ತು ಟ್ಯುಟೋರಿಯಲ್
ತಯಾರಿ ಕೆಲಸ
ಎ. Robostudio, ರಿಮೋಟ್ UI ಡೌನ್ಲೋಡ್ ಮಾಡಿ
ದಯವಿಟ್ಟು ಅಧಿಕಾರಿಯ ಬಳಿಗೆ ಹೋಗಿ webಡೌನ್ಲೋಡ್ ಮಾಡಲು ಸೈಟ್ RoboStudio ಸ್ಕೇಲೆಬಲ್ ರೋಬೋಟ್ ನಿರ್ವಹಣೆ ಮತ್ತು ಅಭಿವೃದ್ಧಿ ಸಾಫ್ಟ್ವೇರ್ | SLAMTEC , ರಿಮೋಟ್ UI SLAMTEC ಅಭಿವೃದ್ಧಿಪಡಿಸಿದ ಚಿತ್ರಾತ್ಮಕ ಸಂವಹನ ಸಾಫ್ಟ್ವೇರ್ ಆಗಿದೆ, ಬಳಕೆದಾರರು ಅರೋರಾದೊಂದಿಗೆ ಸಂಪರ್ಕವನ್ನು ಸ್ಥಾಪಿಸಲು, ಮ್ಯಾಪಿಂಗ್ ಸ್ಥಾನೀಕರಣ ಮೇಲ್ವಿಚಾರಣೆ ಮತ್ತು ಅಪ್ಲೋಡ್ ಕಾನ್ಫಿಗರೇಶನ್ ಅನ್ನು ಸಾಧಿಸಲು Robostudio ಅನ್ನು ಬಳಸಬಹುದು. files ಮತ್ತು ಇತರ ಕಾರ್ಯಗಳು
ಬಿ. ಅರೋರಾಗೆ ಹ್ಯಾಂಡಲ್ ಅನ್ನು ಸಂಪರ್ಕಿಸಿ ಮತ್ತು ಸಾಧನವನ್ನು ಆನ್ ಮಾಡಿದ ನಂತರ ಅದನ್ನು ಬಳಸಿ
ಮೂಲ ಕಾರ್ಯಾಚರಣೆಗಳು
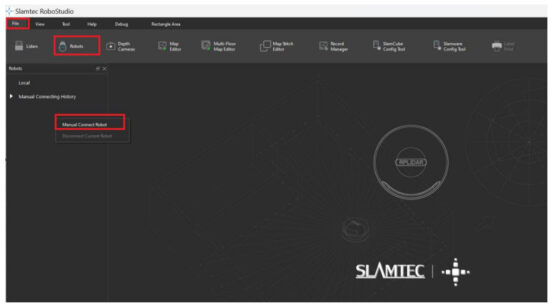
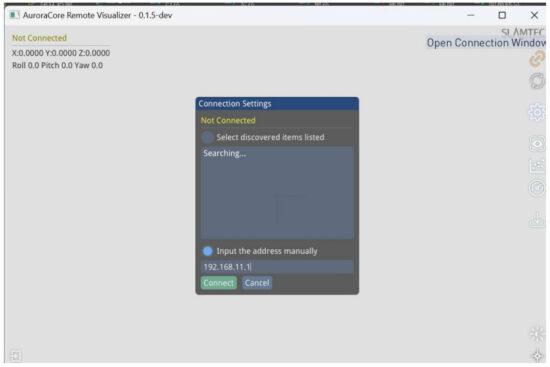
ಎ. RoboStudio ಸಂಪರ್ಕ ಸಾಧನವನ್ನು ಪ್ರಾರಂಭಿಸಿ
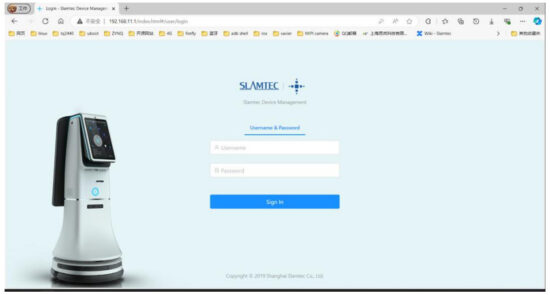
ಬಿ. ಪಾಪ್-ಅಪ್ ವಿಂಡೋದಲ್ಲಿ, IP ವಿಳಾಸ ಪಟ್ಟಿಯಲ್ಲಿ IP 192.168.11.1 ಅನ್ನು ನಮೂದಿಸಿ ಮತ್ತು ಸಾಧನವನ್ನು ಸಂಪರ್ಕಿಸಲು "ಸಂಪರ್ಕ" ಬಟನ್ ಕ್ಲಿಕ್ ಮಾಡಿ
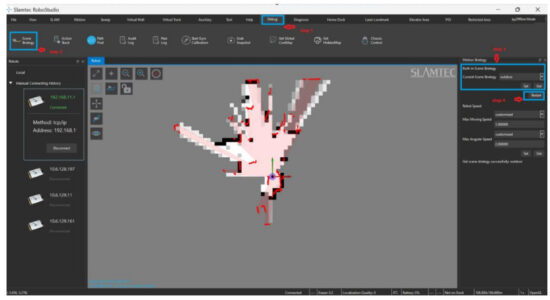
ಸಿ. ಮ್ಯಾಪಿಂಗ್ ಪ್ರಾರಂಭಿಸುವ ಮೊದಲು, ಸೂಕ್ತವಾದ ತಂತ್ರಗಳನ್ನು ಆಯ್ಕೆ ಮಾಡಲು API ಕರೆಗಳು ಅಥವಾ RoboStudio ಅನ್ನು ಬಳಸಿ (ಮೇಲಿನ ಸನ್ನಿವೇಶ ವಿವರಣೆಯನ್ನು ನೋಡಿ), ತದನಂತರ ಸೇವೆ ಮರುಪ್ರಾರಂಭಿಸಿದ ನಂತರ ಮ್ಯಾಪಿಂಗ್ ಪರೀಕ್ಷೆಯನ್ನು ಪ್ರಾರಂಭಿಸಿ. RoboStudio ನ ನಿರ್ದಿಷ್ಟ ಸೆಟ್ಟಿಂಗ್ ವಿಧಾನ
ಡಿ. ಅರೋರಾ ಇನಿಶಿಯಲೈಸೇಶನ್
ಮ್ಯಾಪಿಂಗ್ ಅನ್ನು ಪ್ರಾರಂಭಿಸುವ ಮೊದಲು, ಸಿಸ್ಟಮ್ vslam ಅನ್ನು ಪ್ರಾರಂಭಿಸುತ್ತಿದೆ ಎಂದು ವರದಿ ಮಾಡುತ್ತದೆ ಮತ್ತು ಅರೋರಾ ಇನಿಶಿಯಲೈಸೇಶನ್ ಕಾರ್ಯಾಚರಣೆಯನ್ನು ನಿರ್ವಹಿಸಬೇಕಾಗಿದೆ. ನಿರ್ದಿಷ್ಟ ಆರಂಭಿಕ ಕಾರ್ಯಾಚರಣೆಯು ಈ ಕೆಳಗಿನಂತಿರುತ್ತದೆ:
- ಸ್ಪಷ್ಟವಾದ ವೈಶಿಷ್ಟ್ಯಗಳೊಂದಿಗೆ ಪ್ರದೇಶವನ್ನು ಹುಡುಕಿ, ಅದನ್ನು ಎದುರಿಸಿ, ಅರೋರಾವನ್ನು ಸರಿಸುಮಾರು ಸಮತಲ ಸ್ಥಿತಿಯಲ್ಲಿ 2-3 ಮೀ ದೂರದಲ್ಲಿ ಹಿಡಿದುಕೊಳ್ಳಿ ಮತ್ತು ಪ್ರಾರಂಭಿಸಲು ಪ್ರಾರಂಭಿಸಿ.
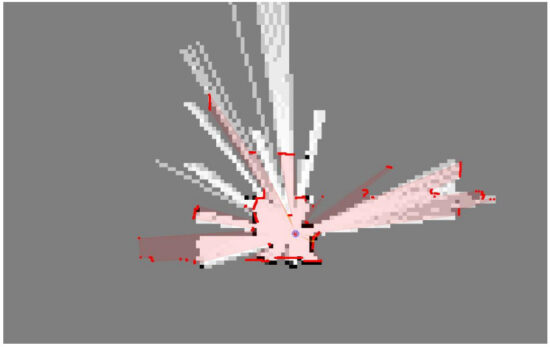
- ಕೈಯಲ್ಲಿ ಹಿಡಿಯುವ ಸಾಧನವನ್ನು ಸ್ಥಿರವಾಗಿ ಇರಿಸಿ. ಸಂವಾದಾತ್ಮಕ ಇಂಟರ್ಫೇಸ್ನಿಂದ ಆಶ್ಚರ್ಯಸೂಚಕ ಗುರುತು ಕಣ್ಮರೆಯಾಗುವವರೆಗೆ ಈ ಕಾರ್ಯಾಚರಣೆಯನ್ನು ಮುಂದುವರಿಸಿ. ಕೆಳಗಿನ ಚಿತ್ರದಲ್ಲಿ ತೋರಿಸಿರುವಂತೆ ಔಪಚಾರಿಕ ಮ್ಯಾಪಿಂಗ್ ಪ್ರಕ್ರಿಯೆಯನ್ನು ಪ್ರಾರಂಭಿಸಿ.
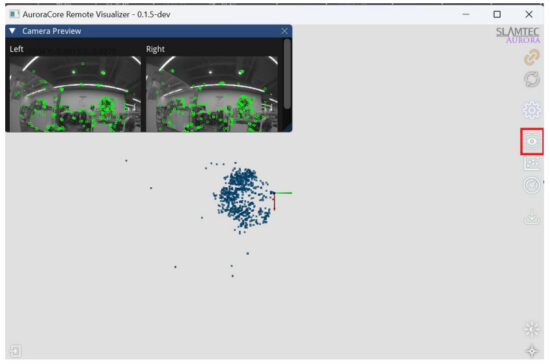
ಇ. aurora_remote ಅನ್ನು ಬಳಸಿ view ಪಾಯಿಂಟ್ ಕ್ಲೌಡ್, ಪಾಪ್-ಅಪ್ ವಿಂಡೋದಲ್ಲಿ, IP ವಿಳಾಸ ಪಟ್ಟಿಯಲ್ಲಿ IP 192.168.11.1 ಅನ್ನು ನಮೂದಿಸಿ, ತದನಂತರ ಸಾಧನವನ್ನು ಸಂಪರ್ಕಿಸಲು "ಸಂಪರ್ಕ" ಬಟನ್ ಕ್ಲಿಕ್ ಮಾಡಿ
"ಫ್ರೇಮ್ ಅನ್ನು ಟಾಗಲ್ ಮಾಡಿ" ಕ್ಲಿಕ್ ಮಾಡಿ Viewಕ್ಯಾಮೆರಾದಿಂದ ಗಮನಿಸಿದ ಚಿತ್ರಗಳು ಮತ್ತು ವೈಶಿಷ್ಟ್ಯದ ಅಂಶಗಳನ್ನು ಪ್ರದರ್ಶಿಸಲು ಬಲ ಟೂಲ್ಬಾರ್ನಲ್ಲಿ
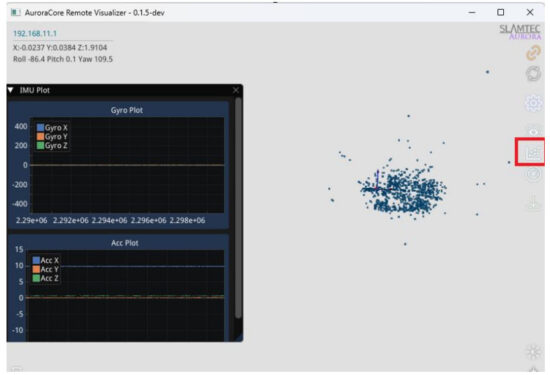
IMU ಅನ್ನು ಟಾಗಲ್ ಮಾಡಿ ಕ್ಲಿಕ್ ಮಾಡಿ View” ಪ್ರಸ್ತುತ ಪರೀಕ್ಷಾ ಯಂತ್ರದ ಗೈರೊ ಗೈರೊಸ್ಕೋಪ್ನ ಕೋನೀಯ ವೇಗವನ್ನು ಮತ್ತು ಪ್ರಸ್ತುತ ಪರೀಕ್ಷಾ ಯಂತ್ರದ ಮೂರು ಅಕ್ಷಗಳಲ್ಲಿ (X, Y, Z) ರೇಖೀಯ ವೇಗವರ್ಧನೆಯನ್ನು ಕ್ರಿಯಾತ್ಮಕವಾಗಿ ಪ್ರದರ್ಶಿಸಲು ಬಲ ಟೂಲ್ಬಾರ್ನಲ್ಲಿ
f. ಫರ್ಮ್ವೇರ್ ಅಪ್ಗ್ರೇಡ್
i. ಅರೋರಾ ಸಾಧನವನ್ನು ಆನ್ ಮಾಡಿ
ii ಕಂಪ್ಯೂಟರ್ ಅನ್ನು ಅರೋರಾ ಹಾಟ್ಸ್ಪಾಟ್ ಅಥವಾ ಈಥರ್ನೆಟ್ಗೆ ಸಂಪರ್ಕಿಸಿ
iii 192.168.11.1 ಬ್ರೌಸರ್ಗೆ ಭೇಟಿ ನೀಡಿ ಮತ್ತು ಕೆಳಗಿನ ಪುಟವನ್ನು ನಮೂದಿಸಿ
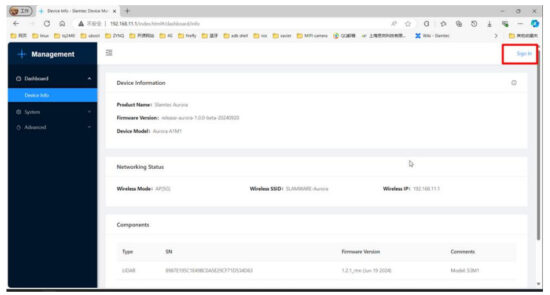
iv. ಲಾಗಿನ್ ಪುಟವನ್ನು ನಮೂದಿಸಲು "ಸೈನ್ ಇನ್" ಕ್ಲಿಕ್ ಮಾಡಿ
v. ಖಾತೆ ಮತ್ತು ಪಾಸ್ವರ್ಡ್ ನಮೂದಿಸಿ
vi. ನಿರ್ವಾಹಕ:admin111
vii. “ಸಿಸ್ಟಮ್” → “ಫರ್ಮ್ವೇರ್ ಅಪ್ಡೇಟ್” → “ಆಯ್ಕೆ ಮಾಡಿ Fileಅಪ್ಗ್ರೇಡ್ ಮಾಡಿದ ಫರ್ಮ್ವೇರ್ ಅನ್ನು ಆಯ್ಕೆ ಮಾಡಲು
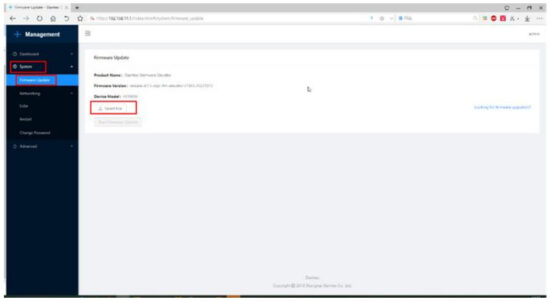
viii. ಫರ್ಮ್ವೇರ್ ಅಪ್ಗ್ರೇಡ್ ಮಾಡುವುದನ್ನು ಪ್ರಾರಂಭಿಸಲು "ಸ್ಟಾರ್ಟ್ ಫರ್ಮ್ವೇರ್ ಅಪ್ಡೇಟ್" ಕ್ಲಿಕ್ ಮಾಡಿ.
ix. ಅಪ್ಗ್ರೇಡ್ ಲಾಗ್ನಲ್ಲಿ "ಯಶಸ್ಸು" ಕಾಣಿಸಿಕೊಳ್ಳಲು ನಿರೀಕ್ಷಿಸಿ, ಅಪ್ಗ್ರೇಡ್ ಪೂರ್ಣಗೊಂಡಿದೆ.
ಜಿ. ದ್ವಿತೀಯ ಅಭಿವೃದ್ಧಿಗಾಗಿ SDK ಬಳಸಿ
SLAMTEC ಅರೋರಾ ಶ್ರೀಮಂತ SDK ಪರಿಕರಗಳನ್ನು ಒದಗಿಸುತ್ತದೆ. ದ್ವಿತೀಯ ಅಭಿವೃದ್ಧಿಗಾಗಿ ಬಳಕೆದಾರರು ಸ್ವತಂತ್ರವಾಗಿ ಸೂಕ್ತವಾದ SDK ಉಪಕರಣವನ್ನು ಆಯ್ಕೆ ಮಾಡಬಹುದು, ಅವುಗಳೆಂದರೆ:
- C++ SDK
- ಜಾವಾ SDK
- ROS SDK
ವಿಶಿಷ್ಟ ಸನ್ನಿವೇಶದ ಮಾರ್ಗ ಯೋಜನೆ ಸಲಹೆಗಳು
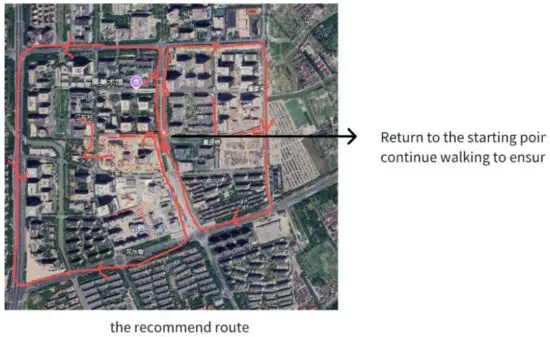
ಒಟ್ಟಾರೆ ಸ್ವಾಧೀನ ಮಾರ್ಗದ ತತ್ವ
➢ ಸ್ಕ್ಯಾನಿಂಗ್ ಪ್ರಕ್ರಿಯೆಯಲ್ಲಿ ಸಾಧ್ಯವಾದಷ್ಟು ಹೆಚ್ಚಿನ ವೀಕ್ಷಣೆಗಳನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಿ
➢ ಸಾಧ್ಯವಾದಷ್ಟು ಹೊಸ ಪ್ರದೇಶಗಳನ್ನು ಸ್ಕ್ಯಾನ್ ಮಾಡುವುದನ್ನು ತಪ್ಪಿಸಲು ಪ್ರಯತ್ನಿಸಿ ಮತ್ತು ನಿರ್ದಿಷ್ಟ ಲೂಪ್ ತೆಗೆದುಕೊಳ್ಳಿ
➢ ಡೈನಾಮಿಕ್ ವಸ್ತುಗಳ ಪ್ರಭಾವವನ್ನು ಸಾಧ್ಯವಾದಷ್ಟು ತಪ್ಪಿಸಿ
➢ ಸಾಧ್ಯವಾದಷ್ಟು ಮುಚ್ಚಿದ-ಲೂಪ್ ಲೂಪ್ಗಳನ್ನು ನಡೆಯಿರಿ
ಟಿಪ್ಪಣಿಗಳು:
- ಸಂಪೂರ್ಣ ಹೊಸ ನಕ್ಷೆಯನ್ನು ರಚಿಸಲು ತಯಾರಿ ಮಾಡುವ ಮೊದಲು ದಯವಿಟ್ಟು "ನಕ್ಷೆಯನ್ನು ತೆರವುಗೊಳಿಸಿ" ಬಟನ್ ಅನ್ನು ಕ್ಲಿಕ್ ಮಾಡಿ, ಇಲ್ಲದಿದ್ದರೆ ಮ್ಯಾಪಿಂಗ್ ಆಪ್ಟಿಮೈಸೇಶನ್ ಎಂಜಿನ್ ಕಾರ್ಯರೂಪಕ್ಕೆ ಬರಲು ಖಾತರಿ ನೀಡಲಾಗುವುದಿಲ್ಲ
- ಲೂಪ್ ಮೂಲಕ್ಕೆ ಮರಳಿದ ನಂತರ, ರೋಬೋಟ್ ಅನ್ನು ಚಲಿಸುವಂತೆ ಮಾಡಿ ಮತ್ತು ಹೆಚ್ಚು ಅತಿಕ್ರಮಿಸುವ ಮಾರ್ಗಗಳನ್ನು ತೆಗೆದುಕೊಳ್ಳಿ. ತಕ್ಷಣ ಚಲಿಸುವುದನ್ನು ನಿಲ್ಲಿಸಬೇಡಿ
- ಲೂಪ್ನ ಮೂಲಕ್ಕೆ ಹಿಂತಿರುಗಿದ ನಂತರ, ನಕ್ಷೆಯನ್ನು ಮುಚ್ಚದಿದ್ದರೆ, ಅದು ಮುಚ್ಚುವವರೆಗೆ ನಡೆಯಲು ಮುಂದುವರಿಯಿರಿ
- ಮುಚ್ಚಿದ ಪ್ರದೇಶಗಳಿಗೆ, ಹಳೆಯ ಮಾರ್ಗವನ್ನು ತೆಗೆದುಕೊಳ್ಳುವುದನ್ನು ತಪ್ಪಿಸಿ ಮತ್ತು ಮೆಮೊರಿ ಬಳಕೆಯನ್ನು ಕಡಿಮೆ ಮಾಡಿ
- ಒಳಗೆ ಮತ್ತು ಹೊರಗೆ
ಲೇಸರ್ ಮತ್ತು ದೃಷ್ಟಿ ಸಾಮಾನ್ಯವಾಗಿದೆ ಎಂದು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು ನೀವು ಪಕ್ಕಕ್ಕೆ ಪ್ರವೇಶಿಸಬೇಕು ಮತ್ತು ನಿರ್ಗಮಿಸಬೇಕು view ನಮೂದಿಸುವ ಮೊದಲು, ಮತ್ತು ಡೇಟಾವನ್ನು ಉತ್ತಮವಾಗಿ ಸಂಪರ್ಕಿಸಿ
ಸೀಮಿತ ಜಾಗವನ್ನು ಪ್ರವೇಶಿಸುವುದು ಮತ್ತು ನಿರ್ಗಮಿಸುವುದು: ಸೀಮಿತ ಜಾಗವನ್ನು ಸ್ಕ್ಯಾನ್ ಮಾಡಿದ ನಂತರ, ಉಲ್ಲೇಖದ ವಸ್ತುಗಳು ಸಾಕಷ್ಟಿವೆಯೇ ಮತ್ತು ಸ್ಕ್ಯಾನಿಂಗ್ ಪ್ರಕ್ರಿಯೆಯಲ್ಲಿ ರಚನಾತ್ಮಕ ವೈಶಿಷ್ಟ್ಯಗಳು ಸ್ಪಷ್ಟವಾಗಿವೆಯೇ ಎಂಬುದನ್ನು ಗಮನಿಸುವುದು ಅವಶ್ಯಕ.
ಮೇಲಿನ ಎರಡು ಷರತ್ತುಗಳನ್ನು ಪೂರೈಸದಿದ್ದರೆ, ಜೋಡಿಸಲು ಪ್ರಯತ್ನಿಸಿ view ದೃಷ್ಟಿಕೋನದಲ್ಲಿ ಯಾವುದೇ ತೀವ್ರವಾದ ಬದಲಾವಣೆಗಳನ್ನು ತಪ್ಪಿಸುವಾಗ ನಿರ್ಗಮಿಸುವಾಗ ಉತ್ತಮವಾಗಿ-ರಚನಾತ್ಮಕ ವೈಶಿಷ್ಟ್ಯದ ಪ್ರದೇಶದ ಕಡೆಗೆ.
ಟಿಪ್ಪಣಿಗಳು
ಮೂಲ ಬಳಕೆಯ ವಿಶೇಷಣಗಳು
➢ SLAMTEC ಅರೋರಾ ಒಂದು ನಿಖರ ಸಾಧನವಾಗಿದೆ. ಬಾಹ್ಯ ಶಕ್ತಿಗಳಿಂದ ಬೀಳುವುದು ಅಥವಾ ಹೊಡೆಯುವುದು ಉಪಕರಣದ ಹಾನಿಗೆ ಕಾರಣವಾಗಬಹುದು, ಇದರ ಪರಿಣಾಮವಾಗಿ ಅಸಹಜ ಕೆಲಸ ಅಥವಾ ನಿಖರವಾದ ನಿಖರತೆ ಅಥವಾ ಉಪಕರಣಕ್ಕೆ ಸಂಪೂರ್ಣ ಹಾನಿಯಾಗಬಹುದು.
➢ ಉಪಕರಣವನ್ನು ಸ್ವಚ್ಛಗೊಳಿಸಲು ಮೃದುವಾದ ಒಣ ಬಟ್ಟೆ ಅಥವಾ ಸ್ವಯಂ-ಒದಗಿಸಿದ ಶುಚಿಗೊಳಿಸುವ ಬಟ್ಟೆಯನ್ನು ಬಳಸಲು ಶಿಫಾರಸು ಮಾಡಲಾಗಿದೆ. ದಯವಿಟ್ಟು ರಾಡಾರ್ ಮತ್ತು ಲೆನ್ಸ್ ಭಾಗಗಳನ್ನು ಸ್ವಚ್ಛವಾಗಿಡಿ ಮತ್ತು ನಿಮ್ಮ ಕೈಗಳಿಂದ ನೇರವಾಗಿ ಸ್ಪರ್ಶಿಸಬೇಡಿ
➢ ಬಳಕೆಯ ಸಮಯದಲ್ಲಿ ದೇಹದ ಶಾಖವನ್ನು ಹರಡುವ ಭಾಗವನ್ನು ಮುಚ್ಚಬೇಡಿ ಅಥವಾ ಸ್ಪರ್ಶಿಸಬೇಡಿ. ಬಳಕೆಯ ಸಮಯದಲ್ಲಿ ಸಾಧನದ ಉಷ್ಣತೆಯು ತುಂಬಾ ಹೆಚ್ಚಾದಾಗ, ಅದು ಅಸಹಜವಾಗಿ ಕೆಲಸ ಮಾಡಬಹುದು
ಆರಂಭಿಕ ಹಂತವನ್ನು ಪ್ರಾರಂಭಿಸಿ
➢ ಉಪಕರಣದ ಪ್ರಾರಂಭದ ಪ್ರಾರಂಭದ ಹಂತದಲ್ಲಿ, ಉಪಕರಣವು ಸ್ಥಿರವಾಗಿದೆ ಮತ್ತು ಸಾಧ್ಯವಾದಷ್ಟು ಅಲುಗಾಡದಂತೆ ನೋಡಿಕೊಳ್ಳುವುದು ಅವಶ್ಯಕ.
➢ ಪ್ರಾರಂಭದ ಸಮಯದಲ್ಲಿ, ಅರೋರಾ ಹೆಚ್ಚು ವೈಶಿಷ್ಟ್ಯಗಳನ್ನು ಹೊಂದಿರುವ ಪ್ರದೇಶಗಳನ್ನು ಗುರಿಯಾಗಿಸಬೇಕು ಮತ್ತು ದೂರವು 2-3 ಮೀ ಒಳಗೆ ಇರಬೇಕು, ತೆರೆದ ಬಯಲು, ಗಾಜಿನ ದೊಡ್ಡ ಪ್ರದೇಶಗಳಂತಹ ವಕ್ರೀಕಾರಕ ಪರಿಸರಗಳು ಮತ್ತು ಹೆಚ್ಚು ಕ್ರಿಯಾತ್ಮಕ ವಸ್ತುಗಳನ್ನು ಹೊಂದಿರುವ ಪ್ರದೇಶಗಳಂತಹ ಕಡಿಮೆ ವೈಶಿಷ್ಟ್ಯಗಳೊಂದಿಗೆ ಪರಿಸರವನ್ನು ತಪ್ಪಿಸಬೇಕು. ಸಾಕಷ್ಟು ಪ್ರಾರಂಭಿಕ ವೈಶಿಷ್ಟ್ಯಗಳನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು ಮತ್ತು ಉತ್ತಮ ಡೇಟಾ ಫಲಿತಾಂಶಗಳನ್ನು ಪಡೆಯಲು. 3 ಸೆಕೆಂಡುಗಳ ಕಾಲ ಸ್ಥಿರವಾಗಿರುವ ನಂತರ ಮತ್ತು ಸಿಸ್ಟಮ್ ಅನ್ನು ಯಶಸ್ವಿಯಾಗಿ ಪ್ರಾರಂಭಿಸಲು ಕಾಯುತ್ತಿರುವ ನಂತರ, ಸಾಧನವನ್ನು ಚಲಿಸಲು ಪ್ರಾರಂಭಿಸಿ ಮತ್ತು ಕೆಲಸದ ಸ್ಥಿತಿಯನ್ನು ನಮೂದಿಸಿ
ಸಲಕರಣೆಗಳ ಕೆಲಸದ ಹಂತ
➢ ದೇಹದ ಕ್ಷಿಪ್ರ ತಿರುಗುವಿಕೆ ಅಥವಾ ಹಠಾತ್ ನಿಲುಗಡೆಗಳನ್ನು ತಪ್ಪಿಸಿ, ಇದು ಉಪಕರಣಗಳು ಕ್ಷಿಪ್ರ ಮತ್ತು ದೊಡ್ಡ ವಿಚಲನ ಮತ್ತು ಅಲುಗಾಡುವಿಕೆಯನ್ನು ಅನುಭವಿಸಲು ಕಾರಣವಾಗಬಹುದು, ಇದು ಮ್ಯಾಪಿಂಗ್ ನಿಖರತೆ ಮತ್ತು ಪರಿಣಾಮವನ್ನು ನಿರ್ದಿಷ್ಟ ಮಟ್ಟಿಗೆ ಪರಿಣಾಮ ಬೀರುತ್ತದೆ
➢ ಸ್ಕ್ಯಾನ್ ಮಾಡುವಾಗ, ಸಾಮಾನ್ಯ ವಾಕಿಂಗ್ ವೇಗದಲ್ಲಿ ನಡೆಯಲು ಸೂಚಿಸಲಾಗುತ್ತದೆ. ಕಡಿಮೆ ವೈಶಿಷ್ಟ್ಯಗಳು, ಕಿರಿದಾದ ಸ್ಥಳಗಳು, ತಿರುವುಗಳು ಇತ್ಯಾದಿಗಳನ್ನು ಹೊಂದಿರುವ ಸಂದರ್ಭಗಳಲ್ಲಿ, ನಿಧಾನಗೊಳಿಸಲು ಸೂಚಿಸಲಾಗುತ್ತದೆ
➢ ಸಾಮಾನ್ಯ ವಾಕಿಂಗ್ ಪರಿಸ್ಥಿತಿಗಳಲ್ಲಿ, ಉಪಕರಣವು ಸಾಧ್ಯವಾದಷ್ಟು 20 ° ಗಿಂತ ಹೆಚ್ಚು ಓರೆಯಾಗಬಾರದು
➢ ಬಹು ಕೊಠಡಿಗಳು ಅಥವಾ ಮಹಡಿಗಳನ್ನು ಒಳಗೊಂಡಿರುವ ಒಳಾಂಗಣ ದೃಶ್ಯಗಳನ್ನು ಸ್ಕ್ಯಾನ್ ಮಾಡುವಾಗ, ದಯವಿಟ್ಟು ಮುಂಚಿತವಾಗಿ ಒಳಾಂಗಣ ಬಾಗಿಲನ್ನು ತೆರೆಯಿರಿ. ಬಾಗಿಲಿನ ಮೂಲಕ ಹಾದುಹೋಗುವಾಗ, ನಿಧಾನವಾಗಿ ಸ್ಕ್ಯಾನ್ ಮಾಡಿ ಮತ್ತು ಬಾಗಿಲಿನ ಎರಡೂ ಬದಿಗಳಲ್ಲಿನ ವೈಶಿಷ್ಟ್ಯಗಳನ್ನು ಒಂದೇ ಸಮಯದಲ್ಲಿ ಸ್ಕ್ಯಾನ್ ಮಾಡಬಹುದು ಎಂದು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು ಸ್ವಲ್ಪ ಸಮಯದವರೆಗೆ ಬಾಗಿಲಿನ ಬದಿಯಲ್ಲಿ ಇರಿ. ಸ್ಕ್ಯಾನಿಂಗ್ ಸಮಯದಲ್ಲಿ ಬಾಗಿಲು ತೆರೆಯದಿದ್ದರೆ, ಬಾಗಿಲನ್ನು ಸಮೀಪಿಸುವ ಮೊದಲು ನಿಧಾನವಾಗಿ ತಿರುಗಿ, ಉಪಕರಣವನ್ನು ಬಾಗಿಲಿನಿಂದ ತಿರುಗಿಸಿ, ಬಾಗಿಲು ತೆರೆಯಲು ನಿಮ್ಮ ಬೆನ್ನನ್ನು ತಿರುಗಿಸಿ ಮತ್ತು ನಿಧಾನವಾಗಿ ಪ್ರವೇಶಿಸಿ.
ಪರಿಷ್ಕರಣೆ ಇತಿಹಾಸ
| ದಿನಾಂಕ | ಆವೃತ್ತಿ | ವಿವರಣೆ |
| 10/11/2024 | 1.0 | ಆರಂಭಿಕ ಆವೃತ್ತಿ |
![]()
ದಾಖಲೆಗಳು / ಸಂಪನ್ಮೂಲಗಳು
 |
SLAMTEC ಅರೋರಾ ಮ್ಯಾಪಿಂಗ್ ಮತ್ತು ಸ್ಥಳೀಕರಣ ಪರಿಹಾರ [ಪಿಡಿಎಫ್] ಬಳಕೆದಾರರ ಕೈಪಿಡಿ ಅರೋರಾ ಮ್ಯಾಪಿಂಗ್ ಮತ್ತು ಸ್ಥಳೀಕರಣ ಪರಿಹಾರ, ಅರೋರಾ, ಮ್ಯಾಪಿಂಗ್ ಮತ್ತು ಸ್ಥಳೀಕರಣ ಪರಿಹಾರ, ಸ್ಥಳೀಕರಣ ಪರಿಹಾರ, ಪರಿಹಾರ |