![]()
نقشي سازي جو هڪ نئون دور ۽
localization حل

استعمال ڪندڙ دستي
وڌيڪ مستحڪم
وڌيڪ صحيح
وڌيڪ طاقتور
شنگھائي Slamtec Co., Ltd
مٿانview
Aurora SLAMTEC پاران تيار ڪيل LIDAR، وژن، اندروني نيويگيشن، ۽ ڊيپ لرننگ ٽيڪنالاجيز جو هڪ جديد فيوزن آهي. اهو ترقي يافته لوڪلائيزيشن ۽ ميپنگ پرسيپشن سينسرز کي ضم ڪري ٿو، انڊور ۽ آئوٽ ڊور ٻنهي لاءِ ڇهين درجي جي فريڊم لوڪلائيزيشن پيش ڪري ٿو، 3D هاءِ-پريسيئن ميپنگ سسٽم، شروع ڪرڻ تي ڪنهن به خارجي انحصار جي ضرورت ناهي. اضافي طور تي، Aurora هڪ جامع ٽول چين سان گڏ اچي ٿو، بشمول گرافيڪل انٽرفيس سافٽ ويئر RoboStudio ۽ SDK ٽول ڪِٽس ثانوي ترقيءَ لاءِ، صارفين کي تيزيءَ سان ڪسٽمائيز ايپليڪيشنون ٺاهڻ ۽ پراڊڪٽ جي ترتيب کي تيز ڪرڻ جي قابل بڻائي ٿي. پيداوار جي مکيه خاصيتون شامل آهن:
- فيوزن LIDAR + بائنڪولر وژن + IMU ملٽي سورس فيوزن الگورٿم، سپورٽنگ خارجي توسيع (GPS/RTK، اوڊوميٽر، وغيره)
- انڊور ۽ آئوٽ ڊور 3D ميپنگ ۽ لوڪلائيزيشن جا ڪم مهيا ڪريو
- AI ٽيڪنالاجي کي ضم ڪرڻ 3D تصور جي صلاحيتن کي وڌائڻ لاء
- هڪ مڪمل ٽول چين سان، ڪلائنٽ سائڊ ايپليڪيشن جي توسيع لاءِ سپورٽ
- صنعت جي اڳواڻي نظام جي استحڪام

1.1 ڪم ڪرڻ جو اصول ۽ استعمال
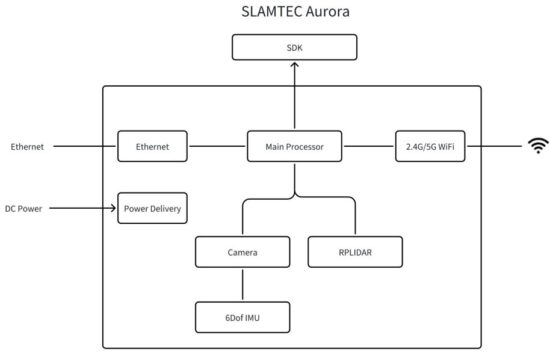
SLAMTEC Aurora Slamtec کان LIDAR-vision-IMU فيوزن جو منفرد SLAM الگورتھم استعمال ڪري ٿو. بصري ۽ ليزر خاصيتن کي گڏ ڪندي، اهو نقشي جي ڊيٽا فيوزن کي 10 ڀيرا في سيڪنڊ کان وڌيڪ ڪري سگهي ٿو ۽ نقشي جي ڊيٽا جي هڪ ملين چورس ميٽر تائين ٺاهي سگھي ٿو. سسٽم ڊاگرام هيٺ ڏيکاريل آهي. سسٽم جي پيداوار کي ثانوي ترقي لاءِ ٽول چين جي طور تي بيان ڪري سگهجي ٿو، بشمول بصري رابطي جا اوزار Robostudio، C++ sdk، JAVA sdk، Restful API sdk، ROS sdk، وغيره.
بنيادي آپريشن
2.1 تنصيب ۽ چڪاس
- بجلي جي فراهمي جو سامان
- انٽرفيس ماڊل: DC5521
- ان پٽ Voltagاي (موجوده): DC12V (2A)
- عام بجلي جي فراهمي کي پورا ڪرڻ لاءِ 12V-2A پاور اڊاپٽر استعمال ڪرڻ جي صلاح ڏني وئي آهي
- اهو هڪ بيٽري استعمال ڪرڻ جي صلاح ڏني آهي هڪ آئوٽ وول سانtag12V جي e ۽ 5000mAh کان وڌيڪ گنجائش، جيڪا 2 ڪلاڪن کان وڌيڪ بيٽري جي زندگي سان عام بجلي جي فراهمي کي پورا ڪري سگهي ٿي
فنڪشن اهم آپريشن
| فنڪشن | بٽڻ آپريشن | ڊوائيس جي حالت |
| تيار رهو | ڊوائيس کي اسٽينڊ بائي موڊ ۾ رکڻ لاءِ پاور بٽڻ کي ڊگھو دٻايو | اشاري جي روشني نڪري ٿي ۽ ڊوائيس اسٽينڊ بائي موڊ ۾ داخل ٿئي ٿي |
| پاور آن | ڊوائيس اسٽينڊ بائي موڊ ۾ داخل ٿيڻ کان پوء، پاور موڊ ۾ داخل ٿيڻ لاء مختصر پريس | اشارو روشني ڳاڙهي کان پيلي چمڪ ۾ تبديل ٿي، ڊوائيس جي شروعات ۾ داخل ڪنديtage |
| معطل | ڊوائيس جي روڪيل ڪم واري حالت ۾ داخل ٿيڻ لاءِ روڪي بٽڻ کي مختصر دٻايو. | اشاري جي روشني سائي چمڪي ٿي |
اشارو روشني جي وضاحت
| ڊوائيس لائيٽ چمڪندڙ موڊ | وصف |
| ڳاڙهو هميشه روشن آهي | بوٽ اپ ڪرڻ |
| زرد چمڪندڙ | بوٽ مڪمل، ڊوائيس شروعاتي مرحلي ۾ داخل ٿئي ٿو |
| پيلو ڊگهو روشن | سسٽم جي شروعات مڪمل ڪئي وئي، ميپنگ شروع ڪرڻ جو انتظار |
| سائو هميشه روشن آهي | ڪم تي |
| ڳاڙهو چمڪندڙ | ڊوائيس استثنا |
| سائو چمڪندڙ | ڊوائيس کي روڪڻ لاء روڪيو بٽڻ کي دٻايو |
منظر حڪمت عملي جي وضاحت
اورورا ٽن منظرن جي سوئچنگ طريقن کي سپورٽ ڪري ٿو. استعمال ڪندڙ اثر کي يقيني بڻائڻ لاءِ ھيٺ ڏنل بيان مطابق منظر تبديل ڪري سگھن ٿا. اندروني پاليسي استعمال ڪرڻ لاء سسٽم ڊفالٽ.
| منظر جو درجو | اندر | وڏي_پيماني تي_اندر | ٻاهران |
| منظر جون خاصيتون | ليزر مشاهدو نسبتا امير آهي، ۽ ماحول ۾ به اهڙا ڪيترائي منظر آهن، جيڪي پرڻجن ٿا غلط بندش جي مسئلي جا منظر |
منظر وسيع آهي، ۽ اهو آسان آهي ليزر مشاهدي جي حد کان وڌيڪ. مجموعي طور تي مشاهدو نسبتا گهٽ آهي، ۽ ماحول تبديل ٿيندڙ آهي |
کليل، وڏو منظر علائقو، مختلف جايون موافقت موجود آهن |
| عام منظر | دفتري عمارت ، دفتر ، حڪومت مرڪز/طبي ادارا/هوٽ ايل ايس، وغيره |
وڏا پارڪنگ لاٽ، شاپنگ مال، سب وي اسٽيشنون، ويٽنگ هال، سرڪاري مرڪز/طبي ادارا/هوٽل لابيون وڏيون علائقن (رڊار مشاهدي جي حد کان ٻاهر)، وغيره |
عام ٻاهرين منظر، پارڪ، گهٽيون، لان، وغيره، ڪجهه اندروني جڳهون، جهڙوڪ سرڪلر اسٽيڊيم ۽ جمنازيم، هڪ وڏو مجموعي علائقو آهي |
2.2 ڊوائيس ڪنيڪشن ۽ سبق
تياري جو ڪم
هڪ ڊائون لوڊ ڪريو Robostudio، Remote UI
مهرباني ڪري سرڪاري ڏانهن وڃو webڊائون لوڊ ڪرڻ لاء سائيٽ RoboStudio اسڪيلبل روبوٽ مينيجمينٽ ۽ ڊولپمينٽ سافٽ ويئر | SLAMTEC , Remote UI SLAMTEC پاران تيار ڪيل هڪ گرافڪ رابطي واري سافٽ ويئر آهي، صارف Robostudio استعمال ڪري سگهن ٿا Aurora سان ڪنيڪشن قائم ڪرڻ لاءِ، ميپنگ پوزيشننگ مانيٽرنگ ۽ اپلوڊ ڪرڻ جي ترتيب حاصل ڪرڻ لاءِ files ۽ ٻيا ڪم
ب. ھينڊل کي Aurora سان ڳنڍيو ۽ ان کي استعمال ڪرڻ کان پوءِ ڊيوائس کي آن ڪيو
بنيادي آپريشن
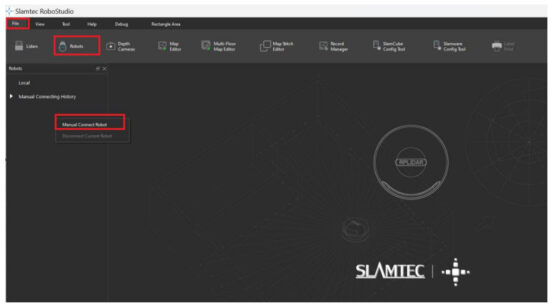
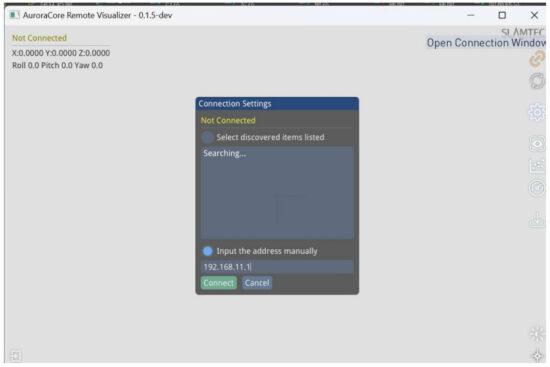
هڪ روبو اسٽوڊيو ڪنيڪٽ ڊوائيس شروع ڪريو
ب. پاپ اپ ونڊو ۾، IP ائڊريس بار ۾ IP 192.168.11.1 داخل ڪريو ۽ ڊوائيس کي ڳنڍڻ لاءِ "Connect" بٽڻ تي ڪلڪ ڪريو.
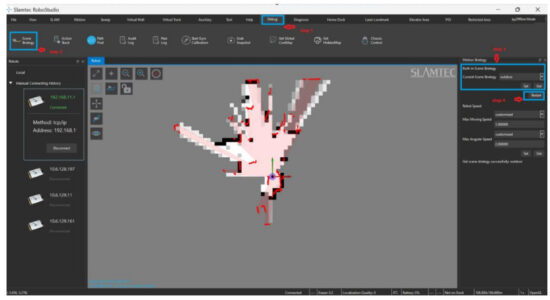
ج. ميپنگ شروع ڪرڻ کان اڳ، مناسب حڪمت عمليون چونڊڻ لاءِ API ڪالز يا RoboStudio استعمال ڪريو (مٿي ڏنل منظرنامو جي وضاحت ڏانهن رجوع ڪريو) ۽ پوءِ سروس ٻيهر شروع ٿيڻ کان پوءِ ميپنگ جي جاچ شروع ڪريو. RoboStudio جو مخصوص سيٽنگ جو طريقو
ڊي. اورورا جي شروعات
ميپنگ شروع ڪرڻ کان اڳ، سسٽم رپورٽ ڪري ٿو ته vslam شروعات ڪري رهيو آهي، ۽ اورورا شروعاتي آپريشن کي انجام ڏيڻ جي ضرورت آهي. مخصوص شروعاتي آپريشن هن ريت آهي:
- واضح خصوصيتن سان هڪ علائقو ڳوليو، ان کي منهن ڏيو، 2-3 ميٽر جي مفاصلي تي تقريباً افقي حالت ۾ اورورا کي رکو، ۽ شروعات ڪرڻ شروع ڪريو.
- هٿ واري ڊوائيس کي اسٽيشنري رکو. ھن عمل کي جاري رکو جيستائين عجب جو نشان انٽرفيس مان غائب ٿي وڃي. رسمي نقشي سازي جي عمل کي شروع ڪريو، جيئن هيٺ ڏنل شڪل ۾ ڏيکاريل آهي.
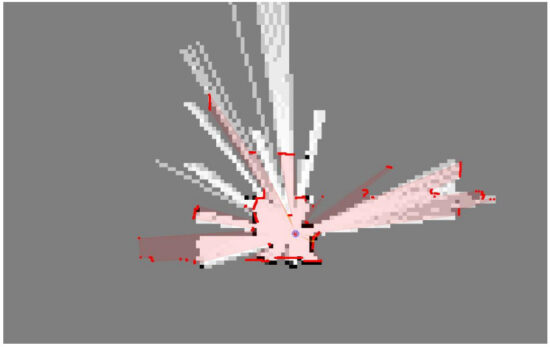
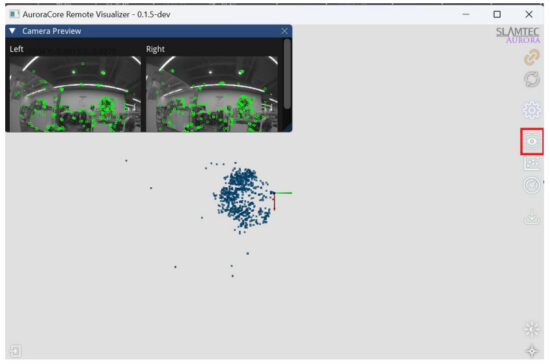
e. استعمال ڪريو aurora_remote to view پوائنٽ ڪلائوڊ، پاپ اپ ونڊو ۾، IP ائڊريس بار ۾ IP 192.168.11.1 داخل ڪريو، ۽ پوء ڊوائيس کي ڳنڍڻ لاء "Connect" بٽڻ تي ڪلڪ ڪريو.
ڪلڪ ڪريو "ٽوگل فريم View”ساڄي ٽول بار تي ڪيمرا پاران مشاهدو ڪيل تصويرون ۽ فيچر پوائنٽس کي ڊسپلي ڪرڻ لاءِ
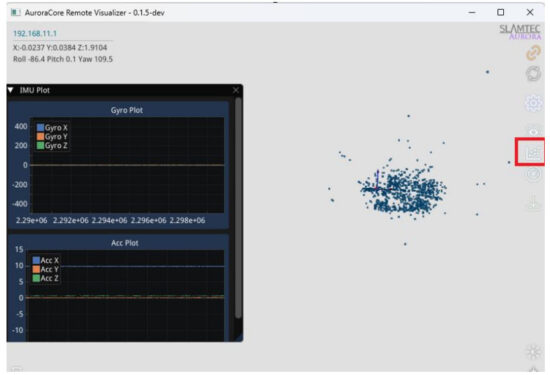
ڪلڪ ڪريو "Toggle IMU Viewساڄي ٽول بار تي موجوده ٽيسٽ مشين جي Gyro gyroscope جي angular velocity ۽ موجوده ٽيسٽ مشين جي ٽن محور (X, Y, Z) ۾ لڪير جي رفتار کي متحرڪ طور تي ظاهر ڪرڻ لاءِ.
f. فرم ويئر اپ گريڊ
i. اورورا ڊوائيس تي پاور
ii. ڪمپيوٽر کي Aurora hotspot يا Ethernet سان ڳنڍيو
iii. 192.168.11.1 برائوزر تي وڃو ۽ ھيٺ ڏنل صفحو داخل ڪريو
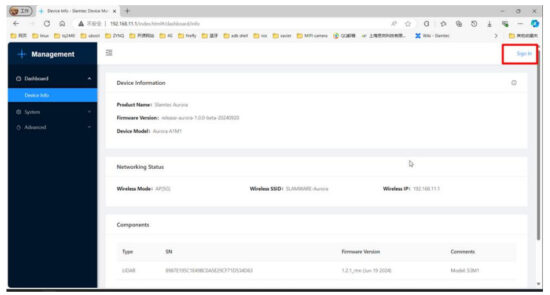
iv. لاگ ان صفحي ۾ داخل ٿيڻ لاءِ ”سائن ان“ تي ڪلڪ ڪريو
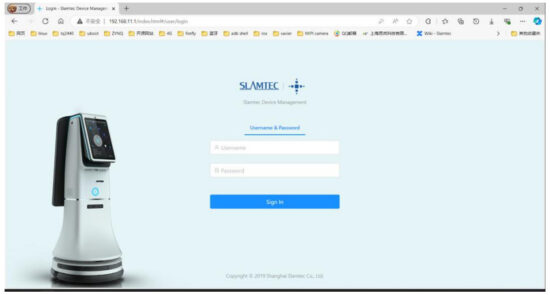
v. کاتو ۽ پاسورڊ داخل ڪريو
vi. منتظم: منتظم111
vii "سسٽم" تي ڪلڪ ڪريو → "فرم ويئر اپڊيٽ" → "چونڊيو File”اپگريڊ ٿيل فرم ویئر کي چونڊڻ لاءِ
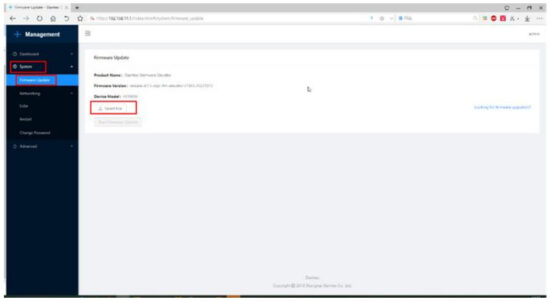
viii. فرم ویئر کي اپڊيٽ ڪرڻ شروع ڪرڻ لاءِ ”شروع فرم ويئر اپڊيٽ“ تي ڪلڪ ڪريو.
ix. اپڊيٽ لاگ ۾ ظاهر ٿيڻ لاءِ ”ڪاميابي“ جو انتظار ڪريو، اپ گريڊ مڪمل ٿيو.
جي. ثانوي ترقي لاءِ SDK استعمال ڪريو
SLAMTEC Aurora SDK اوزارن جو هڪ ڀرپور سيٽ مهيا ڪري ٿو. صارف آزاديءَ سان ثانوي ترقي لاءِ مناسب SDK اوزار چونڊي سگھن ٿا، بشمول:
- سي ++ SDK
- جاوا SDK
- ROS SDK
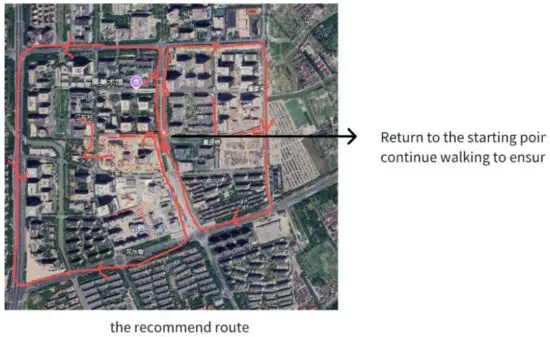
عام منظرنامو روٽ پلاننگ جون تجويزون
مجموعي حصول جي رستي جو اصول
➢ اسڪيننگ جي عمل دوران ممڪن حد تائين وڌيڪ مشاهدن کي يقيني بڻايو وڃي
➢ ڪوشش ڪريو ته جيترو ٿي سگھي نون علائقن کي اسڪين ڪرڻ کان پاسو ڪريو ۽ ھڪ خاص لوپ وٺو
➢ ممڪن حد تائين متحرڪ شين جي اثر کان پاسو ڪريو
➢ جيترو ٿي سگهي بند ٿيل لوپ تي هلو
نوٽس:
- مھرباني ڪري مڪمل نئون نقشو ٺاھڻ لاءِ تياري ڪرڻ کان پھريائين ”نقشي صاف ڪريو“ بٽڻ تي ڪلڪ ڪريو، ٻي صورت ۾ نقشي جي اصلاح واري انجڻ جي اثر ٿيڻ جي ضمانت نه ٿي ڏئي سگھجي.
- لوپ اصل ڏانهن موٽڻ کان پوء، روبوٽ کي حرڪت ۾ رکو ۽ وڌيڪ اوورليپنگ رستا وٺو. فوري طور تي هلڻ بند نه ڪريو
- لوپ جي اصليت ڏانھن موٽڻ کان پوء، جيڪڏھن نقشو بند نه آھي، ھلڻ جاري رکو جيستائين اھو بند نه ٿئي
- بند ٿيل علائقن لاء، پراڻي رستو وٺڻ کان پاسو ڪريو ۽ ياداشت جي استعمال کي گھٽايو
- اندر ۽ ٻاهر
توهان کي ضرورت آهي داخل ٿيڻ ۽ ٻاهر نڪرڻ جي پاسي کان پڪ ڪرڻ لاءِ ته ليزر ۽ وژن هڪ عام آهي view داخل ٿيڻ کان اڳ، ۽ بهتر ڊيٽا کي ڳنڍيو
محدود جڳھ ۾ داخل ٿيڻ ۽ نڪرڻ: محدود جڳھ کي اسڪين ڪرڻ کان پوء، اھو ڏسڻ ضروري آھي ته ڇا حوالو شيون ڪافي آھن ۽ ڇا اسڪيننگ جي عمل دوران ساخت جون خاصيتون واضح آھن.
جيڪڏهن مٿيان ٻه شرط پورا نه ٿين، ڪوشش ڪريو ترتيب ڏيڻ جي view ٻاهر نڪرڻ وقت هڪ چڱي طرح ٺهيل خصوصيت واري علائقي ڏانهن، جڏهن ته نقطه نظر ۾ ڪنهن به سخت تبديلين کان بچڻ.
نوٽس
بنيادي استعمال جون خاصيتون
➢ SLAMTEC Aurora ھڪڙو درست سامان آھي. گرڻ يا خارجي قوتن جي مارجڻ سان سامان کي نقصان ٿي سگھي ٿو، نتيجي ۾ غير معمولي ڪم يا غلط درستگي، يا سامان کي مڪمل نقصان
➢ سامان کي صاف ڪرڻ لاءِ نرم سڪل ڪپڙو يا خود مهيا ڪيل صفائي واري ڪپڙي کي استعمال ڪرڻ جي صلاح ڏني وئي آهي. مھرباني ڪري ريڊار ۽ لينس جي حصن کي صاف رکو ۽ انھن کي سڌو سنئون پنھنجي ھٿن سان نه ڇڪيو
➢ استعمال دوران جسم جي گرميءَ جي گھٽتائي واري حصي کي نه ڍڪيو يا نه ڇهيو. جڏهن ڊوائيس جي گرمي استعمال دوران تمام گهڻي آهي، اهو غير معمولي ڪم ڪري سگهي ٿو
شروعاتي مرحلي کي شروع ڪريو
➢ سامان جي شروعات جي شروعاتي مرحلي دوران، ان کي يقيني بڻائڻ ضروري آهي ته سامان مستحڪم ۽ ممڪن طور تي ڇڪڻ کان آزاد آهي.
➢ شروع ڪرڻ دوران، Aurora کي وڌيڪ خصوصيتن سان علائقن کي نشانو بڻائڻ گهرجي، ۽ فاصلو 2-3m جي اندر هجڻ گهرجي، گهٽ خصوصيتن سان ماحول کان پاسو ڪرڻ گهرجي جهڙوڪ کليل ميدانن، اضطراب واري ماحول جهڙوڪ شيشي جا وڏا علائقا، ۽ وڌيڪ متحرڪ شيون، ترتيب سان. ڪافي شروعاتي خاصيتن کي يقيني بڻائڻ ۽ بهتر ڊيٽا جا نتيجا حاصل ڪرڻ. 3 سيڪنڊن لاءِ اسٽيشنري ٿيڻ کان پوءِ ۽ سسٽم جي ڪاميابيءَ سان شروع ٿيڻ جو انتظار ڪرڻ کان پوءِ، ڊوائيس کي هلڻ شروع ڪريو ۽ ڪم ڪندڙ رياست ۾ داخل ٿيو.
سامان جو ڪم مرحلو
➢ جسم جي تيز گھمڻ يا اوچتو بند ٿيڻ کان پاسو ڪريو، جنهن جي ڪري سامان به تيزيءَ سان ۽ وڏي انفڪريشن ۽ ڇڪڻ جو تجربو ڪري سگھي ٿو، جيڪو نقشي جي درستگي ۽ اثر کي هڪ خاص حد تائين متاثر ڪندو.
➢ اسڪين ڪرڻ وقت، ان کي عام هلڻ جي رفتار تي هلڻ جي صلاح ڏني وئي آهي. حالتن لاء گھٽ خاصيتون، تنگ جڳھون، موڙ، وغيره، ان کي سست ڪرڻ جي صلاح ڏني وئي آھي
➢ عام هلڻ جي حالتن ۾، سامان کي جيترو ممڪن ٿي سگهي 20 ° کان وڌيڪ نه ڇڪڻ گهرجي
➢ گھڻن ڪمرن يا منزلن تي مشتمل اندرين منظرن کي اسڪين ڪرڻ وقت، مھرباني ڪري انڊور دروازو اڳ ۾ کوليو. دروازي مان لنگھڻ مھل، سست رفتاريءَ سان اسڪين ڪريو ۽ دروازي جي پاسي ۾ دير تائين رھو، انھيءَ کي يقيني بڻائڻ لاءِ ته دروازي جي ٻنهي پاسن جون خاصيتون ھڪ ئي وقت اسڪين ڪري سگھجن ٿيون. جيڪڏهن اسڪيننگ دوران دروازو نه کليل آهي، دروازي جي ويجهو اچڻ کان اڳ آهستي آهستي موڙ ڪريو، اوزار کي دروازي کان پري ڪريو، دروازو کولڻ لاءِ پٺي موڙي، ۽ آهستي آهستي اندر داخل ٿيو.
نظرثاني جي تاريخ
| تاريخ | نسخو | وصف |
| 10/11/2024 | 1.0 | شروعاتي نسخو |
![]()
دستاويز / وسيلا
 |
SLAMTEC اورورا ميپنگ ۽ لوڪلائيزيشن حل [pdf] استعمال ڪندڙ دستياب Aurora Mapping and Localization Solution, Aurora, Mapping and Localization Solution, Localization Solution, Solution |