![]()
地图绘制和
本地化解决方案

用户手册
更稳定
更准确
更强大
上海 思岚科技有限公司
超过view
Aurora 是思岚科技创新融合激光雷达、视觉、惯性导航和深度学习技术的产品,集成先进的定位和建图感知传感器,可为室内外三维高精度建图系统提供六自由度定位,启动时无需依赖任何外部工具。此外,Aurora 还附带完善的工具链,包括图形界面软件 RoboStudio 和用于二次开发的 SDK 工具包,使用户能够快速创建定制化应用程序,加速产品部署。产品主要特点包括:
- 融合LIDAR+双目视觉+IMU多源融合算法,支持外部扩展(GPS/RTK、里程计等)
- 提供室内和室外的3D地图绘制和定位功能
- 融入AI技术,增强3D感知能力
- 拥有完善的工具链,支持客户端应用扩展
- 业界领先的系统稳定性

1.1 工作原理及用途
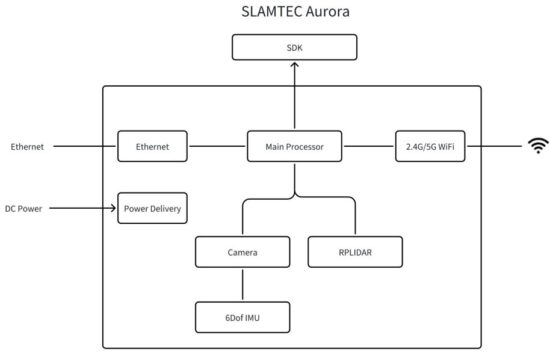
SLAMTEC Aurora采用思岚科技独有的LIDAR-vision-IMU融合SLAM算法,结合视觉与激光特性,每秒可进行10次以上地图数据融合,绘制高达百万平米的地图数据。系统框图如下图所示。系统输出可定义为二次开发的工具链,包括视觉交互工具Robostudio、C++ sdk、JAVA sdk、Restful API sdk、ROS sdk等。
基本操作
2.1 安装与检查
- 设备电源
- 接口型号:DC5521
- 输入音量tage(电流):DC12V(2A)
- 建议使用12V-2A电源适配器满足正常供电
- 建议使用输出电压tag12V,容量大于5000mAh,可满足正常供电,续航时间大于2小时
功能键操作
| 功能 | 按钮操作 | 设备状态 |
| 支持 | 长按电源按钮使设备进入待机模式 | 指示灯熄灭,设备进入待机模式 |
| 开机 | 设备进入待机模式后,短按进入电源模式 | 指示灯由红灯转为黄灯闪烁,进入设备初始化状态tage |
| 暂停 | 短按暂停键,进入设备暂停工作状态。 | 指示灯闪烁绿色 |
指示灯说明
| 设备灯闪烁模式 | 描述 |
| 红色永远是明亮的 | 启动 |
| 黄色闪烁 | 启动完成,设备进入初始化阶段 |
| 黄色长亮 | 系统初始化完成,等待开始映射 |
| 绿色永远是明亮的 | 在上班 |
| 红灯闪烁 | 设备异常 |
| 绿色闪烁 | 按暂停按钮暂停设备 |
场景策略描述
Aurora支持三种场景切换模式,用户可根据下文说明进行场景切换,以保证使用效果。系统默认使用室内策略。
| 场景类别 | 室内的 | 大型室内 | 户外的 |
| 场景特征 | 激光观测比较丰富, 并且环境中存在许多类似的场景,容易 错误关闭问题场景 |
场景广阔,易于 超出激光观察范围。 整体观测较为稀疏,环境变化多端 |
开阔,场景面积大,地形多样 存在适应性 |
| 典型场景 | 写字楼、办公室、政府 中心/医疗机构/酒店等 |
大型停车场、商场、 地铁站、候车厅、 政府中心/医疗机构/酒店大堂等大型 区域(雷达观测范围以外)等 |
典型的室外场景,公园、街道、草坪等,一些室内场地,如圆形体育场馆、体育馆等,整体面积较大 |
2.2 设备连接及教程
准备工作
一个。下载 Robostudio,远程用户界面
请去官方 web下载网站 RoboStudio 可扩展机器人管理和开发软件 | SLAMTEC 、Remote UI是SLAMTEC自主研发的图形交互软件,用户可以使用Robostudio与Aurora建立连接,实现测绘定位监控和上传配置 file和其他功能
b.将手柄与Aurora连接,开机后即可使用
基本操作
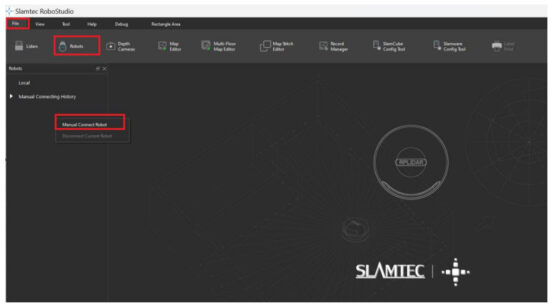
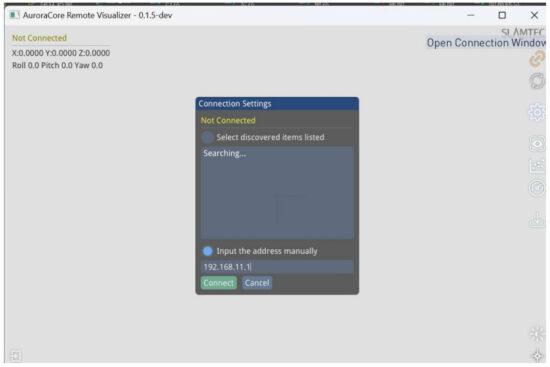
a. 启动 RoboStudio Connect Device
b. 在弹出的窗口中,在IP地址栏中输入IP 192.168.11.1,点击“连接”按钮,连接设备
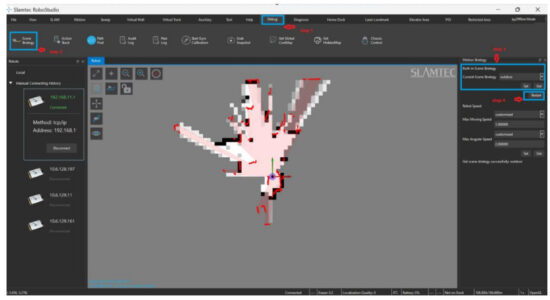
c. 开始测绘前,通过API调用或者RoboStudio选择合适的策略(参考上述场景描述),待服务重启后即可开始测绘测试。RoboStudio的具体设置方法
d.Aurora 初始化
在开始建图之前,系统报vslam正在初始化,需要进行Aurora初始化操作,具体初始化操作如下:
- 找到一处地貌明显的区域,面对它,在2-3m距离处将Aurora保持近似水平状态,开始初始化。
- 保持手持设备静止,继续此操作直至交互界面感叹号消失,开始正式的映射过程,如下图所示。
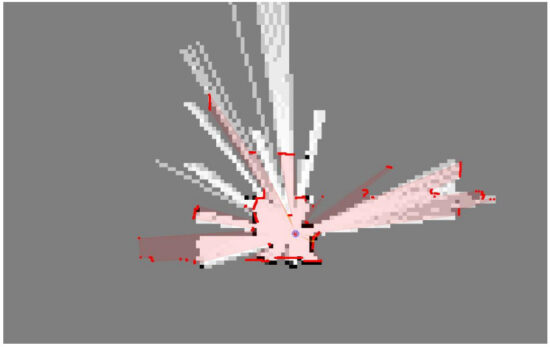
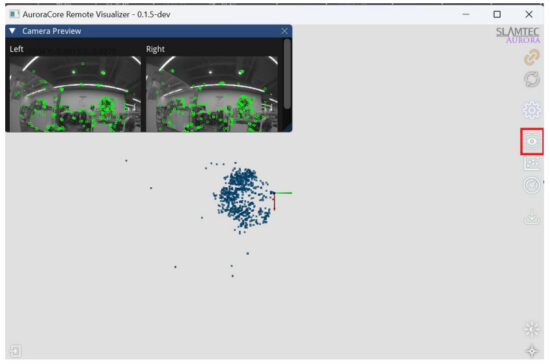
e. 使用 aurora_remote view 点云,在弹出的窗口中,在IP地址栏输入IP 192.168.11.1,然后点击“连接”按钮,连接设备
点击“切换框架 View”显示相机观察到的图像和特征点
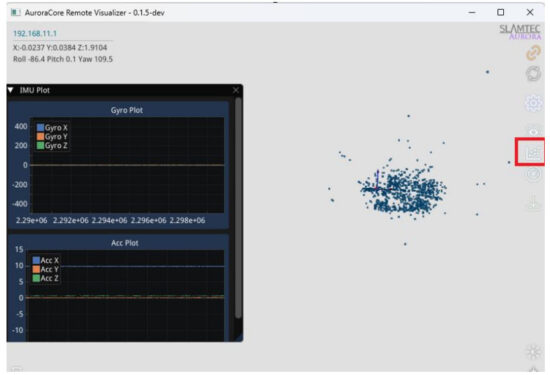
点击“切换 IMU View”可动态显示当前测试机台Gyro陀螺仪的角速度及当前测试机台三轴(X、Y、Z)上的线加速度
f. 固件升级
i. 打开 Aurora 设备电源
ii. 将电脑连接到 Aurora 热点或以太网
iii.访问192.168.11.1浏览器,进入以下页面
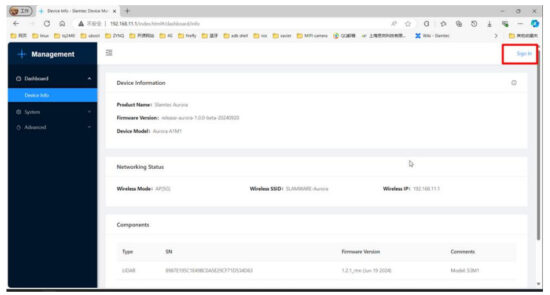
iv. 点击“登录”进入登录页面
v.输入账号和密码
vi. 管理员:admin111
vii. 点击“系统” → “固件更新” → “选择 File”选择升级固件
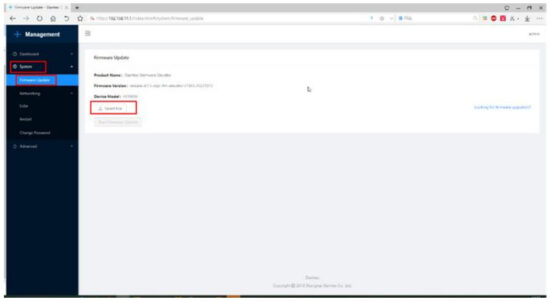
viii. 点击“开始固件更新”开始升级固件。
ix.等待升级日志出现“success”,升级完成。
g.使用SDK进行二次开发
SLAMTEC Aurora提供了丰富的SDK工具,用户可以自由选择合适的SDK工具进行二次开发,主要包括:
- C++ 开发工具包
- Java开发工具包
- ROS开发工具包
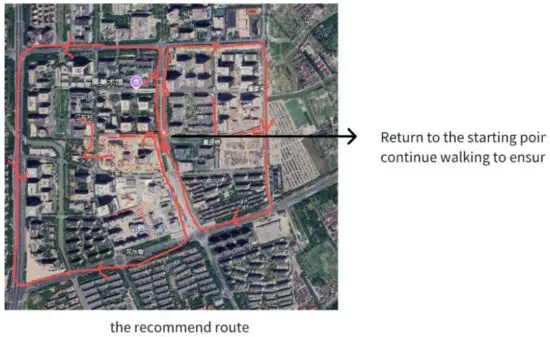
典型场景路线规划建议
总体采集路线原则
➢ 确保在扫描过程中进行尽可能多的观察
➢ 尽量避免扫描新区域,并采取一定的循环
➢ 尽量避免动态物体的影响
➢ 尽可能多地走闭环
笔记:
- 在准备创建完整新地图前请点击“清除地图”按钮,否则无法保证地图优化引擎生效
- 循环返回原点后,保持机器人移动并采取更多重叠路径。不要立即停止移动
- 回到环路原点后,若地图未闭合,则继续走,直至闭合
- 对于封闭区域,避免走旧路,减少内存消耗
- 进出
您需要侧身进入和退出,以确保激光和视觉有共同点 view 在进入之前,更好地连接数据
进出密闭空间:扫描完密闭空间后,需要观察扫描过程中参照物是否充足、结构特征是否明显。
如果上述两个条件不满足,请尝试对齐 view 退出时朝向结构良好的特征区域,同时避免视角发生任何剧烈变化。
笔记
基本使用规范
➢ SLAMTEC Aurora 为精密设备,跌落或受到外力撞击可能造成设备损坏,导致工作异常或精度不准,甚至设备彻底损坏
➢ 建议使用柔软干布或自备清洁布清洁设备,请保持雷达及镜头部件清洁,请勿用手直接触摸
➢ 使用过程中请勿覆盖或触摸机身散热部分,设备在使用过程中温度过高可能导致工作异常
开始初始化阶段
➢ 设备启动初始化阶段,需尽量保证设备稳定、无晃动。
➢ 初始化时,Aurora 应选择特征较多的区域,距离应在 2-3m 以内,避开开阔平原等特征较少的环境、大面积玻璃等折射环境、动态物体较多的区域,以保证初始化特征充足,获得更好的数据效果。静止 3 秒后,等待系统初始化成功,开始移动设备,进入工作状态
设备工作阶段
➢ 避免机体快速旋转或突然停止,这样可能会导致设备也发生快速、较大的偏转和晃动,在一定程度上影响测绘精度和效果
➢ 扫描时,建议以正常步行速度行走。对于特征较少、空间狭窄、转弯等情况,建议放慢速度
➢ 正常行走情况下,设备倾斜尽量不要超过20°
➢ 扫描涉及多个房间或楼层的室内场景时,请提前打开室内门。经过门时,请缓慢扫描并在门边停留一段时间,以确保可以同时扫描到门两侧的特征。如果扫描过程中门未打开,请在靠近门前缓慢转身,将仪器转离门,背对门打开门,缓慢进入
修订历史
| 日期 | 版本 | 描述 |
| 10 年 11 月 2024 日 | 1.0 | 初始版本 |
![]()
文件/资源
 |
SLAMTEC Aurora 测绘与定位解决方案 [pdf] 用户手册 Aurora 测绘和定位解决方案,Aurora,测绘和定位解决方案,定位解决方案,解决方案 |