![]()
ຍຸກໃໝ່ຂອງການສ້າງແຜນທີ່ ແລະ
ການແກ້ໄຂທ້ອງຖິ່ນ

ຄູ່ມືຜູ້ໃຊ້
ໝັ້ນຄົງກວ່າ
ຖືກຕ້ອງຫຼາຍຂຶ້ນ
ມີປະສິດທິພາບຫຼາຍຂຶ້ນ
ຊຽງໄຮ້ Slamtec Co., Ltd
ເກີນview
Aurora ແມ່ນການຜະສົມປະດິດສ້າງຂອງ LIDAR, ວິໄສທັດ, ການນໍາທາງ inertial, ແລະເຕັກໂນໂລຊີການຮຽນຮູ້ເລິກທີ່ພັດທະນາໂດຍ SLAMTEC. ມັນປະສົມປະສານການຕັ້ງຖິ່ນຖານແບບພິເສດແລະເຊັນເຊີການຮັບຮູ້ແຜນທີ່, ສະຫນອງການທ້ອງຖິ່ນທີ່ມີອິດສະລະ 3 ອົງສາສໍາລັບລະບົບການສ້າງແຜນທີ່ XNUMXD ທີ່ມີຄວາມແມ່ນຍໍາສູງທັງພາຍໃນແລະພາຍນອກ, ໂດຍບໍ່ມີການຂຶ້ນກັບພາຍນອກທີ່ຕ້ອງການໃນເວລາເລີ່ມຕົ້ນ. ນອກຈາກນັ້ນ, Aurora ມາພ້ອມກັບລະບົບຕ່ອງໂສ້ເຄື່ອງມືທີ່ສົມບູນແບບ, ລວມທັງຊອບແວການໂຕ້ຕອບແບບກຣາຟິກ RoboStudio ແລະ SDK toolkits ສໍາລັບການພັດທະນາຂັ້ນສອງ, ຊ່ວຍໃຫ້ຜູ້ໃຊ້ສາມາດສ້າງຄໍາຮ້ອງສະຫມັກທີ່ກໍາຫນົດເອງໄດ້ໄວແລະເລັ່ງການນໍາໃຊ້ຜະລິດຕະພັນ. ຄຸນນະສົມບັດທີ່ສໍາຄັນຂອງຜະລິດຕະພັນປະກອບມີ:
- Fusion LIDAR+ ວິໄສທັດກ້ອງສ່ອງທາງໄກ + IMU ຫຼາຍແຫຼ່ງ fusion algorithm, ສະຫນັບສະຫນູນການຂະຫຍາຍພາຍນອກ (GPS / RTK, odometer, ແລະອື່ນໆ)
- ສະໜອງແຜນທີ່ 3 ມິຕິພາຍໃນ ແລະ ກາງແຈ້ງ ແລະຟັງຊັນການຕັ້ງທ້ອງຖິ່ນ
- ການລວມເອົາເທກໂນໂລຍີ AI ເພື່ອເພີ່ມຄວາມສາມາດໃນການຮັບຮູ້ 3D
- ດ້ວຍລະບົບຕ່ອງໂສ້ເຄື່ອງມືທີ່ສົມບູນ, ສະຫນັບສະຫນູນການຂະຫຍາຍຄໍາຮ້ອງສະຫມັກຂ້າງລູກຄ້າ
- ສະຖຽນລະພາບລະບົບຊັ້ນນໍາຂອງອຸດສາຫະກໍາ

1.1 ຫຼັກການການເຮັດວຽກແລະການນໍາໃຊ້
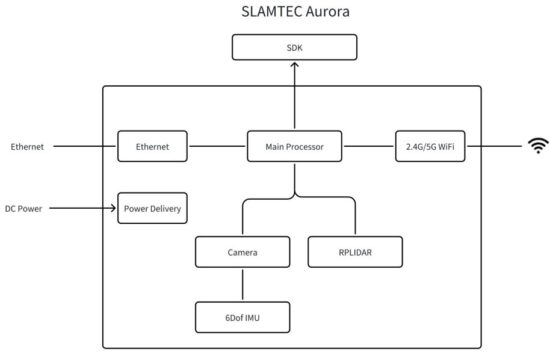
SLAMTEC Aurora ໃຊ້ SLAM algorithm ທີ່ເປັນເອກະລັກຂອງ LIDAR-vision-IMU fusion ຈາກ Slamtec. ການສົມທົບລັກສະນະທາງສາຍຕາແລະເລເຊີ, ມັນສາມາດປະຕິບັດການລວມຂໍ້ມູນແຜນທີ່ຫຼາຍກວ່າ 10 ເທື່ອຕໍ່ວິນາທີແລະແຕ້ມເຖິງຫນຶ່ງລ້ານຕາລາງແມັດຂອງຂໍ້ມູນແຜນທີ່. ແຜນວາດລະບົບສະແດງຢູ່ລຸ່ມນີ້. ຜົນຜະລິດຂອງລະບົບສາມາດຖືກກໍານົດເປັນເຄື່ອງມືສໍາລັບການພັດທະນາຂັ້ນສອງ, ລວມທັງເຄື່ອງມືການໂຕ້ຕອບທາງສາຍຕາ Robostudio, C++ sdk, JAVA sdk, Restful API sdk, ROS sdk, ແລະອື່ນໆ.
ການດໍາເນີນງານພື້ນຖານ
2.1 ການຕິດຕັ້ງແລະການກວດກາ
- ການສະ ໜອງ ພະລັງງານອຸປະກອນ
- ຮູບແບບການໂຕ້ຕອບ: DC5521
- ການປ້ອນຂໍ້ມູນ voltage (ປະຈຸບັນ): DC12V (2A)
- ແນະນໍາໃຫ້ໃຊ້ຕົວແປງໄຟ 12V-2A ເພື່ອຕອບສະຫນອງການສະຫນອງພະລັງງານປົກກະຕິ
- ແນະນໍາໃຫ້ໃຊ້ຫມໍ້ໄຟທີ່ມີຜົນຜະລິດ voltage ຂອງ 12V ແລະຄວາມຈຸຫຼາຍກ່ວາ 5000mAh, ເຊິ່ງສາມາດຕອບສະຫນອງການສະຫນອງພະລັງງານປົກກະຕິທີ່ມີຊີວິດຫມໍ້ໄຟຂອງຫຼາຍກ່ວາ 2 ຊົ່ວໂມງ.
ການດໍາເນີນງານກະແຈ
| ຟັງຊັນ | ການດໍາເນີນງານປຸ່ມ | ສະຖານະອຸປະກອນ |
| ສະແຕນບາຍ | ກົດປຸ່ມເປີດປິດຄ້າງໄວ້ເພື່ອໃຫ້ອຸປະກອນເຂົ້າສູ່ໂໝດສະແຕນບາຍ | ແສງຊີ້ບອກອອກ ແລະອຸປະກອນເຂົ້າສູ່ໂໝດສະແຕນບາຍ |
| ເປີດເຄື່ອງ | ຫຼັງຈາກອຸປະກອນເຂົ້າສູ່ໂໝດສະແຕນບາຍ, ໃຫ້ກົດສັ້ນເພື່ອເຂົ້າສູ່ໂໝດພະລັງງານ | ໄຟຕົວຊີ້ວັດປ່ຽນຈາກສີແດງເປັນສີເຫຼືອງກະພິບ, ເຂົ້າໄປໃນການເລີ່ມຕົ້ນອຸປະກອນ stage |
| ໂຈະ | ກົດປຸ່ມຢຸດຊົ່ວຄາວເພື່ອເຂົ້າສູ່ສະພາບການເຮັດວຽກທີ່ຢຸດຊົ່ວຄາວຂອງອຸປະກອນ. | ໄຟຕົວຊີ້ວັດກະພິບສີຂຽວ |
ຕົວຊີ້ວັດແສງສະຫວ່າງຂອງຕົວຊີ້ວັດ
| ໂໝດກະພິບແສງຂອງອຸປະກອນ | ລາຍລະອຽດ |
| ສີແດງແມ່ນສົດໃສສະເຫມີ | ກຳລັງເປີດເຄື່ອງ |
| ກະພິບສີເຫຼືອງ | Boot ສໍາເລັດ, ອຸປະກອນເຂົ້າສູ່ໄລຍະເບື້ອງຕົ້ນ |
| ຍາວສີເຫຼືອງສົດໃສ | ການເລີ່ມຕົ້ນລະບົບສຳເລັດແລ້ວ, ລໍຖ້າເລີ່ມການສ້າງແຜນທີ່ |
| ສີຂຽວແມ່ນສົດໃສສະເຫມີ | ຢູ່ບ່ອນເຮັດວຽກ |
| ກະພິບສີແດງ | ຂໍ້ຍົກເວັ້ນຂອງອຸປະກອນ |
| ກະພິບສີຂຽວ | ກົດປຸ່ມຢຸດຊົ່ວຄາວເພື່ອຢຸດອຸປະກອນຊົ່ວຄາວ |
ລາຍລະອຽດຍຸດທະສາດສາກ
Aurora ຮອງຮັບສາມຮູບແບບການປ່ຽນສາກ. ຜູ້ໃຊ້ສາມາດສະຫຼັບ scenes ຕາມຄໍາອະທິບາຍຂ້າງລຸ່ມນີ້ເພື່ອຮັບປະກັນຜົນກະທົບການນໍາໃຊ້. ລະບົບເລີ່ມຕົ້ນໃຊ້ນະໂຍບາຍພາຍໃນ.
| ປະເພດສາກ | ພາຍໃນ | Large_scale_indoor | ນອກ |
| ລັກສະນະສາກ | ການສັງເກດການດ້ວຍເລເຊີແມ່ນຂ້ອນຂ້າງອຸດົມສົມບູນ, ແລະມີ scenes ທີ່ຄ້າຍຄືກັນຫຼາຍໃນສະພາບແວດລ້ອມ, ທີ່ມັກ ກັບ scene ບັນຫາການປິດທີ່ຜິດພາດ |
scene ແມ່ນກວ້າງ, ແລະມັນງ່າຍທີ່ຈະ ເກີນຂອບເຂດສັງເກດດ້ວຍເລເຊີ. ການສັງເກດການໂດຍລວມແມ່ນຂ້ອນຂ້າງກະແຈກກະຈາຍ, ແລະສະພາບແວດລ້ອມແມ່ນມີການປ່ຽນແປງ |
ເປີດ, ພື້ນທີ່ scene ຂະຫນາດໃຫຍ່, terrains ຕ່າງໆ ການປັບຕົວມີຢູ່ |
| ສະຖານະການປົກກະຕິ | ອາຄານຫ້ອງການ, ຫ້ອງການ, ລັດຖະບານ ສູນ / ສະຖາບັນການແພດ / hote ls, ແລະອື່ນໆ |
ບ່ອນຈອດລົດຂະຫນາດໃຫຍ່, ສູນການຄ້າ, ສະຖານີລົດໄຟໃຕ້ດິນ, ຫ້ອງໂຖງລໍຖ້າ, ສູນລັດຖະບານ / ສະຖາບັນການແພດ / ຫ້ອງຮັບແຂກໂຮງແຮມທີ່ມີຂະຫນາດໃຫຍ່ ພື້ນທີ່ (radar ເກີນຂອບເຂດສັງເກດ), ແລະອື່ນໆ |
ສາກກາງແຈ້ງທົ່ວໄປ, ສວນສາທາລະນະ, ຖະໜົນຫົນທາງ, ສະໜາມຫຍ້າ ແລະ ອື່ນໆ, ບາງສະຖານທີ່ໃນຮົ່ມ ເຊັ່ນ: ສະໜາມກິລາວົງວຽນ ແລະ ສະໜາມກິລາ, ມີພື້ນທີ່ກວ້າງກວ່າ. |
2.2 ການເຊື່ອມຕໍ່ອຸປະກອນແລະການສອນ
ວຽກກະກຽມ
ກ. ດາວໂຫລດ Robostudio, UI ໄລຍະໄກ
ກະລຸນາໄປຫາເຈົ້າຫນ້າທີ່ webເວັບໄຊທ໌ເພື່ອດາວໂຫລດ RoboStudio ຊອບແວການຈັດການ ແລະການພັດທະນາຫຸ່ນຍົນທີ່ສາມາດຂະຫຍາຍໄດ້ | SLAMTEC , UI ໄລຍະໄກເປັນຊອບແວປະຕິສໍາພັນກາຟິກທີ່ພັດທະນາໂດຍ SLAMTEC, ຜູ້ໃຊ້ສາມາດໃຊ້ Robostudio ເພື່ອສ້າງການເຊື່ອມຕໍ່ກັບ Aurora, ເພື່ອບັນລຸການຕິດຕາມຕໍາແຫນ່ງແຜນທີ່ແລະການຕັ້ງຄ່າການອັບໂຫລດ files ແລະຫນ້າທີ່ອື່ນໆ
ຂ. ເຊື່ອມຕໍ່ມືຈັບກັບ Aurora ແລະໃຊ້ມັນຫຼັງຈາກເປີດອຸປະກອນແລ້ວ
ການດໍາເນີນງານພື້ນຖານ
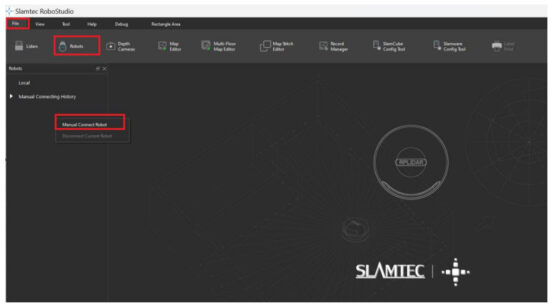
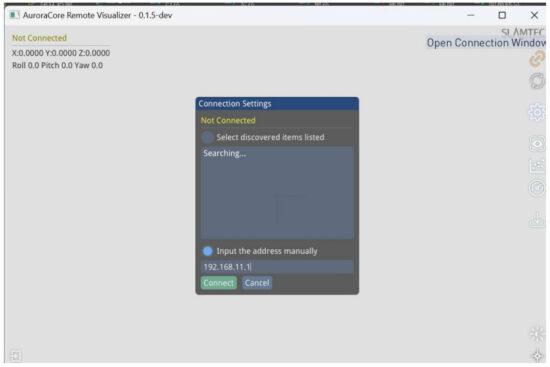
ກ. ເລີ່ມອຸປະກອນເຊື່ອມຕໍ່ RoboStudio
ຂ. ໃນປ່ອງຢ້ຽມປັອບອັບ, ໃຫ້ໃສ່ IP 192.168.11.1 ໃນແຖບທີ່ຢູ່ IP ແລະກົດປຸ່ມ "ເຊື່ອມຕໍ່" ເພື່ອເຊື່ອມຕໍ່ອຸປະກອນ.
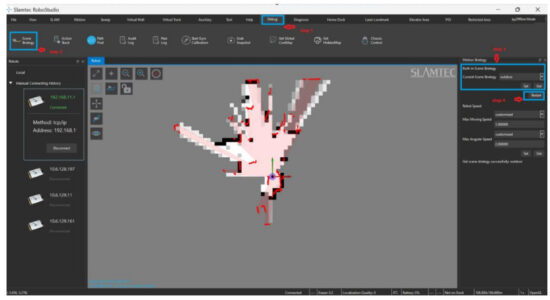
ຄ. ກ່ອນທີ່ຈະເລີ່ມການສ້າງແຜນທີ່, ໃຫ້ໃຊ້ການໂທ API ຫຼື RoboStudio ເພື່ອເລືອກຍຸດທະສາດທີ່ເຫມາະສົມ (ອ້າງອີງເຖິງຄໍາອະທິບາຍສະຖານະການຂ້າງເທິງ), ແລະຫຼັງຈາກນັ້ນເລີ່ມຕົ້ນການທົດສອບການສ້າງແຜນທີ່ຫຼັງຈາກການບໍລິການເລີ່ມຕົ້ນໃຫມ່. ວິທີການຕັ້ງສະເພາະຂອງ RoboStudio
ງ. Aurora ການເລີ່ມຕົ້ນ
ກ່ອນທີ່ຈະເລີ່ມການສ້າງແຜນທີ່, ລະບົບລາຍງານວ່າ vslam ກໍາລັງເລີ່ມຕົ້ນ, ແລະການປະຕິບັດການເລີ່ມຕົ້ນຂອງ Aurora ຕ້ອງໄດ້ຮັບການປະຕິບັດ. ການດໍາເນີນງານເບື້ອງຕົ້ນສະເພາະແມ່ນດັ່ງນີ້:
- ຊອກຫາພື້ນທີ່ທີ່ມີລັກສະນະຊັດເຈນ, ປະເຊີນກັບມັນ, ຖື Aurora ຢູ່ໃນສະພາບແນວນອນປະມານ 2-3 ແມັດ, ແລະເລີ່ມຕົ້ນການເລີ່ມຕົ້ນ.
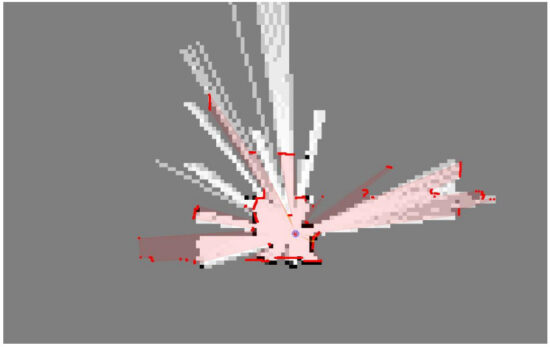
- ຮັກສາອຸປະກອນມືຖືໃຫ້ຢູ່ສະໝໍ່າສະເໝີ. ສືບຕໍ່ການດໍາເນີນການນີ້ຈົນກ່ວາເຄື່ອງຫມາຍ exclamation ຫາຍໄປຈາກການໂຕ້ຕອບການໂຕ້ຕອບ. ເລີ່ມຕົ້ນຂະບວນການສ້າງແຜນທີ່ຢ່າງເປັນທາງການ, ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບຂ້າງລຸ່ມນີ້.
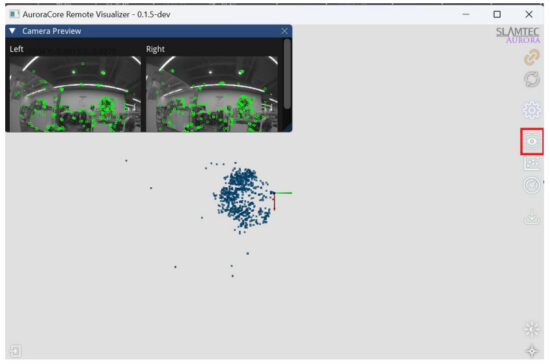
e. ໃຊ້ aurora_remote ເພື່ອ view ຈຸດເມຄ, ໃນປ່ອງຢ້ຽມປ໊ອບອັບ, ໃສ່ IP 192.168.11.1 ໃນແຖບທີ່ຢູ່ IP, ແລະຫຼັງຈາກນັ້ນໃຫ້ຄລິກໃສ່ປຸ່ມ "ເຊື່ອມຕໍ່" ເພື່ອເຊື່ອມຕໍ່ອຸປະກອນ.
ຄລິກ “ສະຫຼັບກອບ View” ຢູ່ແຖບເຄື່ອງມືທີ່ຖືກຕ້ອງເພື່ອສະແດງຮູບພາບ ແລະຈຸດຄຸນສົມບັດທີ່ກ້ອງໄດ້ສັງເກດເຫັນ
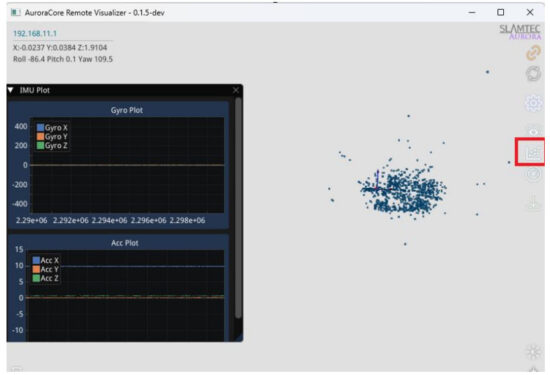
ຄລິກ “ສະຫຼັບ IMU View” ຢູ່ແຖບເຄື່ອງມືທີ່ຖືກຕ້ອງເພື່ອສະແດງຄວາມໄວເປັນລ່ຽມຂອງ Gyro gyroscope ຂອງເຄື່ອງທົດສອບປະຈຸບັນ ແລະການເລັ່ງເສັ້ນໃນສາມແກນ (X, Y, Z) ຂອງເຄື່ອງທົດສອບປະຈຸບັນ.
f. ການຍົກລະດັບເຟີມແວ
i. ເປີດໃຊ້ອຸປະກອນ Aurora
ii. ເຊື່ອມຕໍ່ຄອມພິວເຕີກັບ Aurora ຮັອດສະປອດ ຫຼື ອີເທີເນັດ
iii. ໄປຢ້ຽມຢາມ 192.168.11.1 browser ແລະເຂົ້າໄປໃນຫນ້າຕໍ່ໄປນີ້
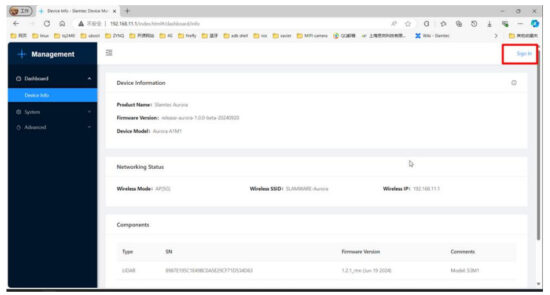
iv. ກົດ "ເຂົ້າສູ່ລະບົບ" ເພື່ອເຂົ້າໄປໃນຫນ້າເຂົ້າສູ່ລະບົບ
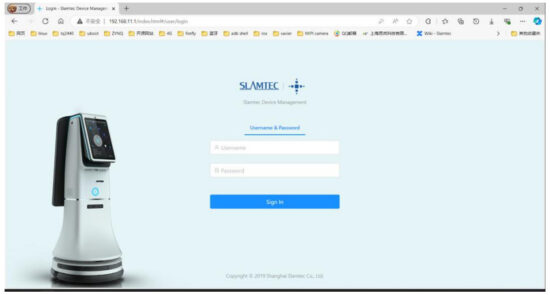
v. ໃສ່ບັນຊີ ແລະລະຫັດຜ່ານ
vi. admin:admin111
vii. ຄລິກ “ລະບົບ” → “ອັບເດດເຟີມແວ” → “ເລືອກ File” ເພື່ອເລືອກເຟີມແວທີ່ຍົກລະດັບ
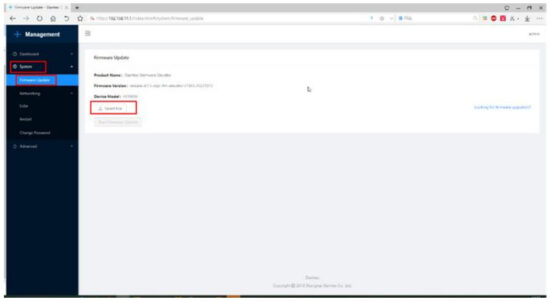
vii. ຄລິກ “ເລີ່ມອັບເດດເຟີມແວ” ເພື່ອເລີ່ມຕົ້ນການອັບເກຣດເຟີມແວ.
ix. ລໍຖ້າ "ຄວາມສໍາເລັດ" ປາກົດຢູ່ໃນບັນທຶກການຍົກລະດັບ, ການຍົກລະດັບສໍາເລັດ.
g. ໃຊ້ SDK ສໍາລັບການພັດທະນາຂັ້ນສອງ
SLAMTEC Aurora ໃຫ້ຊຸດເຄື່ອງມື SDK ທີ່ອຸດົມສົມບູນ. ຜູ້ໃຊ້ສາມາດເລືອກເອົາເຄື່ອງມື SDK ທີ່ເຫມາະສົມສໍາລັບການພັດທະນາຂັ້ນສອງໄດ້ຢ່າງເສລີ, ລວມທັງ:
- C++ SDK
- JAVA SDK
- ROS SDK
ຄຳແນະນຳການວາງແຜນເສັ້ນທາງສະຖານະການທົ່ວໄປ
ຫຼັກການເສັ້ນທາງການຊື້ໂດຍລວມ
➢ ຮັບປະກັນການສັງເກດຫຼາຍເທົ່າທີ່ເປັນໄປໄດ້ໃນລະຫວ່າງຂະບວນການສະແກນ
➢ ພະຍາຍາມຫຼີກລ່ຽງການສະແກນພື້ນທີ່ໃໝ່ໃຫ້ຫຼາຍເທົ່າທີ່ເປັນໄປໄດ້ ແລະ ຖອດສາຍບາງໆ
➢ ຫຼີກລ່ຽງການກະທົບຂອງວັດຖຸແບບເຄື່ອນໄຫວຫຼາຍເທົ່າທີ່ເປັນໄປໄດ້
➢ ຍ່າງເປັນວົງປິດຫຼາຍເທົ່າທີ່ເປັນໄປໄດ້
ໝາຍເຫດ:
- ກະລຸນາຄລິກທີ່ປຸ່ມ “Clear Map” ກ່ອນທີ່ຈະກະກຽມສ້າງແຜນທີ່ໃໝ່ທີ່ສົມບູນ, ຖ້າບໍ່ດັ່ງນັ້ນ ເຄື່ອງຈັກການເພີ່ມປະສິດທິພາບການສ້າງແຜນທີ່ບໍ່ສາມາດຮັບປະກັນວ່າຈະມີຜົນບັງຄັບໃຊ້.
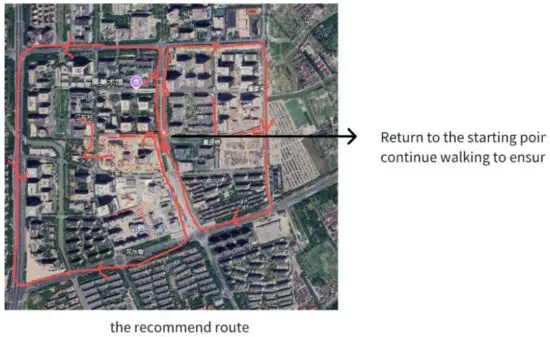
- ຫຼັງຈາກ loop ກັບຄືນສູ່ຕົ້ນກໍາເນີດ, ໃຫ້ຫຸ່ນຍົນເຄື່ອນຍ້າຍແລະໃຊ້ເສັ້ນທາງທີ່ທັບຊ້ອນກັນຫຼາຍຂຶ້ນ. ຢ່າຢຸດການເຄື່ອນໄຫວທັນທີ
- ຫຼັງຈາກກັບຄືນໄປຫາຕົ້ນກໍາເນີດຂອງ loop, ຖ້າແຜນທີ່ບໍ່ໄດ້ປິດ, ສືບຕໍ່ຍ່າງຈົນກ່ວາມັນຖືກປິດ
- ສໍາລັບພື້ນທີ່ປິດ, ຫຼີກເວັ້ນການເສັ້ນທາງເກົ່າແລະຫຼຸດຜ່ອນການບໍລິໂພກຄວາມຈໍາ
- ໃນ ແລະ ອອກ
ທ່ານຈໍາເປັນຕ້ອງເຂົ້າແລະອອກທາງຂ້າງເພື່ອຮັບປະກັນວ່າເລເຊີແລະວິໄສທັດມີທົ່ວໄປ view ກ່ອນທີ່ຈະເຂົ້າ, ແລະເຊື່ອມຕໍ່ຂໍ້ມູນທີ່ດີກວ່າ
ການເຂົ້າໄປໃນແລະອອກຈາກພື້ນທີ່ຈໍາກັດ: ຫຼັງຈາກການສະແກນພື້ນທີ່ຈໍາກັດ, ມັນຈໍາເປັນຕ້ອງໄດ້ສັງເກດເບິ່ງວ່າວັດຖຸອ້າງອີງພຽງພໍແລະມີລັກສະນະໂຄງສ້າງທີ່ເຫັນໄດ້ຊັດເຈນໃນລະຫວ່າງການສະແກນ.
ຖ້າສອງເງື່ອນໄຂຂ້າງເທິງນີ້ບໍ່ໄດ້ບັນລຸ, ພະຍາຍາມຈັດລໍາດັບ view ໄປສູ່ພື້ນທີ່ຄຸນນະສົມບັດທີ່ມີໂຄງສ້າງທີ່ດີໃນເວລາອອກ, ໃນຂະນະທີ່ຫຼີກເວັ້ນການປ່ຽນແປງຢ່າງຮ້າຍແຮງໃນທັດສະນະ.
ບັນທຶກ
ຂໍ້ມູນຈໍາເພາະການນໍາໃຊ້ພື້ນຖານ
➢ SLAMTEC Aurora ແມ່ນອຸປະກອນທີ່ມີຄວາມແມ່ນຍໍາ. ການຫຼຸດລົງຫຼືຖືກຕີໂດຍກໍາລັງພາຍນອກອາດຈະເຮັດໃຫ້ເກີດຄວາມເສຍຫາຍຂອງອຸປະກອນ, ສົ່ງຜົນໃຫ້ການເຮັດວຽກຜິດປົກກະຕິຫຼືບໍ່ຖືກຕ້ອງ, ຫຼືແມ້ກະທັ້ງຄວາມເສຍຫາຍທີ່ສົມບູນຂອງອຸປະກອນ.
➢ ແນະນຳໃຫ້ໃຊ້ຜ້າແຫ້ງອ່ອນ ຫຼື ຜ້າອະນາໄມທີ່ສະໜອງໃຫ້ຕົນເອງເພື່ອເຮັດຄວາມສະອາດອຸປະກອນ. ກະລຸນາຮັກສາພາກສ່ວນ radar ແລະທັດສະນະທໍາຄວາມສະອາດແລະບໍ່ໄດ້ສໍາພັດມັນໂດຍກົງດ້ວຍມືຂອງທ່ານ
➢ ຢ່າປົກປິດ ຫຼືແຕະສ່ວນທີ່ລະບາຍຄວາມຮ້ອນຂອງຮ່າງກາຍໃນເວລາໃຊ້ງານ. ເມື່ອອຸນຫະພູມອຸປະກອນສູງເກີນໄປໃນລະຫວ່າງການໃຊ້ງານ, ມັນອາດຈະເຮັດວຽກຜິດປົກກະຕິ
ເລີ່ມໄລຍະການເລີ່ມຕົ້ນ
➢ ໃນໄລຍະເລີ່ມຕົ້ນຂອງການເລີ່ມຕົ້ນອຸປະກອນ, ມັນຈໍາເປັນຕ້ອງຮັບປະກັນວ່າອຸປະກອນມີຄວາມຫມັ້ນຄົງແລະບໍ່ສັ່ນສະເທືອນເທົ່າທີ່ເປັນໄປໄດ້.
➢ ໃນລະຫວ່າງການເລີ່ມຕົ້ນ, Aurora ຄວນຕັ້ງເປົ້າໝາຍໃສ່ພື້ນທີ່ທີ່ມີລັກສະນະຫຼາຍກວ່າ, ແລະ ໄລຍະຫ່າງຄວນຈະຢູ່ພາຍໃນ 2-3m, ຫຼີກເວັ້ນສະພາບແວດລ້ອມທີ່ມີລັກສະນະໜ້ອຍເຊັ່ນ: ທົ່ງພຽງເປີດ, ສະພາບແວດລ້ອມສະທ້ອນແສງ ເຊັ່ນ: ພື້ນທີ່ກວ້າງຂອງແກ້ວ, ແລະພື້ນທີ່ທີ່ມີວັດຖຸເຄື່ອນໄຫວຫຼາຍ, ຕາມລໍາດັບ. ເພື່ອຮັບປະກັນຄຸນສົມບັດເບື້ອງຕົ້ນທີ່ພຽງພໍ ແລະໄດ້ຮັບຜົນໄດ້ຮັບຂໍ້ມູນທີ່ດີກວ່າ. ຫຼັງຈາກທີ່ຢູ່ສະຖານີສໍາລັບ 3 ວິນາທີແລະລໍຖ້າໃຫ້ລະບົບໄດ້ຮັບການສໍາເລັດໃນເບື້ອງຕົ້ນ, ເລີ່ມຕົ້ນການຍ້າຍອຸປະກອນແລະເຂົ້າໃນສະຖານະການເຮັດວຽກ.
ໄລຍະການເຮັດວຽກຂອງອຸປະກອນ
➢ ຫຼີກລ່ຽງການຫມູນວຽນຂອງຮ່າງກາຍຢ່າງໄວວາ ຫຼື ການຢຸດຢ່າງກະທັນຫັນ, ເຊິ່ງອາດເຮັດໃຫ້ອຸປະກອນເກີດການເໜັງຕີງ ແລະ ການສັ່ນສະເທືອນໄວ ແລະ ໃຫຍ່, ເຊິ່ງຈະສົ່ງຜົນຕໍ່ຄວາມຖືກຕ້ອງຂອງແຜນທີ່ ແລະ ຜົນກະທົບໃນລະດັບໃດໜຶ່ງ.
➢ ເມື່ອສະແກນ, ແນະນຳໃຫ້ຍ່າງດ້ວຍຄວາມໄວໃນການຍ່າງປົກກະຕິ. ສໍາລັບສະຖານະການທີ່ມີລັກສະນະຫນ້ອຍ, ຊ່ອງແຄບ, ຫັນ, ແລະອື່ນໆ, ແນະນໍາໃຫ້ຊ້າລົງ
➢ ພາຍໃຕ້ເງື່ອນໄຂການຍ່າງປົກກະຕິ, ອຸປະກອນບໍ່ຄວນອຽງຫຼາຍກວ່າ 20 °ເທົ່າທີ່ເປັນໄປໄດ້
➢ ເມື່ອສະແກນພາບໃນອາຄານທີ່ມີຫຼາຍຫ້ອງ ຫຼືຊັ້ນ, ກະລຸນາເປີດປະຕູພາຍໃນເຮືອນລ່ວງໜ້າ. ເມື່ອຜ່ານປະຕູ, ສະແກນຊ້າໆແລະຢູ່ດ້ານຂ້າງຂອງປະຕູເປັນໄລຍະເວລາເພື່ອຮັບປະກັນວ່າຄຸນນະສົມບັດທັງສອງດ້ານຂອງປະຕູສາມາດສະແກນໄດ້ໃນເວລາດຽວກັນ. ຖ້າປະຕູບໍ່ເປີດໃນລະຫວ່າງການສະແກນ, ຄ່ອຍໆຫັນໄປກ່ອນທີ່ຈະເຂົ້າຫາປະຕູ, ຫັນເຄື່ອງມືອອກຈາກປະຕູ, ຫັນຫຼັງຂອງທ່ານເພື່ອເປີດປະຕູ, ແລະເຂົ້າໄປໃນຊ້າໆ.
ປະຫວັດການແກ້ໄຂ
| ວັນທີ | ຮຸ່ນ | ລາຍລະອຽດ |
| 10/11/2024 | 1.0 | ສະບັບເລີ່ມຕົ້ນ |
![]()
ເອກະສານ / ຊັບພະຍາກອນ
 |
SLAMTEC Aurora Mapping ແລະການແກ້ໄຂທ້ອງຖິ່ນ [pdf] ຄູ່ມືຜູ້ໃຊ້ Aurora Mapping and Localization Solution, ການແກ້ໄຂແຜນທີ່ Aurora, ການສ້າງແຜນທີ່ ແລະທ້ອງຖິ່ນ, ການແກ້ໄຂທ້ອງຖິ່ນ, ການແກ້ໄຂ |