![]()
A New Era of Mapping and
localization solution

User Manual
More Stable
More Accurate
More Powerful
Shanghai Slamtec Co.,Ltd
Overview
Aurora is an innovative fusion of LIDAR, vision, inertial navigation, and deep learning technologies developed by SLAMTEC. It integrates advanced localization and mapping perception sensors, offering six-degrees-of-freedom localization for both indoor and outdoor 3D high-precision mapping systems, with no external dependencies required at startup. Additionally, Aurora comes with a comprehensive toolchain, including the graphical interface software RoboStudio and SDK toolkits for secondary development, enabling users to quickly create customized applications and accelerate product deployment. Key features of the product include:
- Fusion LIDAR+ binocular vision + IMU multi-source fusion algorithm, supporting external expansion (GPS/RTK, odometer, etc.)
- Provide indoor and outdoor 3D mapping and localization functions
- Integrating AI technology to enhance 3D perception capabilities
- With a complete toolchain, support for client-side application expansion
- Industry-leading system stability

1.1 Working Principle and Use
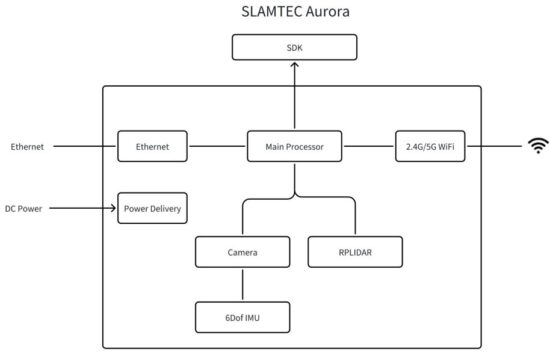
SLAMTEC Aurora uses the unique SLAM algorithm of LIDAR-vision-IMU fusion from Slamtec. Combining visual and laser characteristics, it can performmap data fusion more than 10 times per second and draw up to one million square meters of map data. The system diagram is shown below. The output of the system can be defined as a toolchain for secondary development, including visual interaction tools Robostudio, C++ sdk, JAVA sdk, Restful API sdk, ROS sdk, etc.
Basic operation
2.1 Installation and Inspection
- Equipment power supply
- Interface model: DC5521
- Input voltage (current): DC12V (2A)
- It is recommended to use a 12V-2A power adapter to meet normal power supply
- It is recommended to use a battery with an output voltage of 12V and a capacity greater than 5000mAh, which can meet the normal power supply with a battery life of more than 2 hours
Function key operation
| Function | Button operation | Device status |
| Standby | Long press the power button to put the device into standby mode | The indicator light goes out and the device enters standby mode |
| Power on | After the device enters standby mode, short press to enter power mode | The indicator light changes from red to yellow flashing, entering the device initialization stage |
| Suspend | Short press the pause button to enter the paused working state of the device. | The indicator light flashes green |
Indicator light description
| Device light flashing mode | Description |
| Red is always bright | Booting up |
| Yellow flicker | Boot complete, device enters initialization phase |
| Yellow long bright | System initialization completed, waiting to start mapping |
| Green is always bright | At work |
| Red flashing | Device exception |
| Green flashing | Press the pause button to pause the device |
Scene strategy description
Aurora supports three scene switching modes. Users can switch scenes according to the description below to ensure the usage effect. The system defaults to using the indoor policy.
| Scene category | indoor | Large_scale_indoor | outdoor |
| Scene features | Laser observation is relatively rich, and there are many similar scenes in the environment, which are prone to erroneous closure problem scenes |
The scene is wide, and it is easy to exceed the laser observation range. The overall observation is relatively sparse, and the environment is changeable |
Open, large scene area, various terrain adaptations exist |
| Typical scenario | Office buildings, offices, government centers/medical institutions/hote ls, etc |
Large parking lots, shopping malls, subway stations, waiting halls, government centers/medical institutions/hotel lobbies with large areas (radar beyond observation range), etc |
Typical outdoor scenes, parks, streets, lawns, etc., some indoor venues, such as circular stadiums and gymnasiums, have a larger overall area |
2.2 Device Connection and Tutorial
Preparation work
a. Download Robostudio, Remote UI
Please go to the official website to download RoboStudio scalable robot management and development software | SLAMTEC , Remote UI is a graphical interaction software developed by SLAMTEC, users can use Robostudio to establish a connection with Aurora, to achieve mapping positioning monitoring and uploading configuration files and other functions
b. Connect the handle to Aurora and use it after the device is powered on
Basic operations
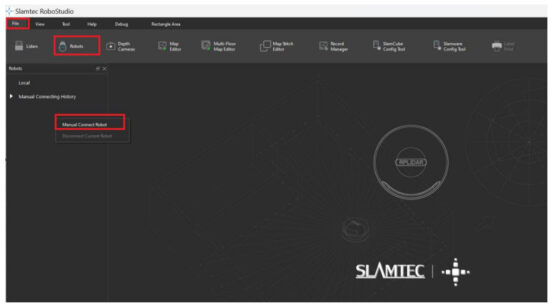
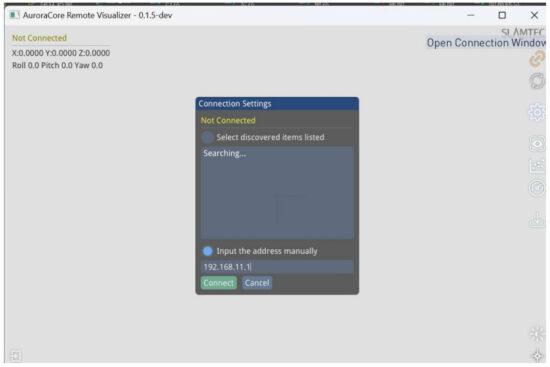
a. Start RoboStudio Connect Device
b. In the pop-up window, enter the IP 192.168.11.1 in the IP Address bar and click the “Connect” button to connect the device
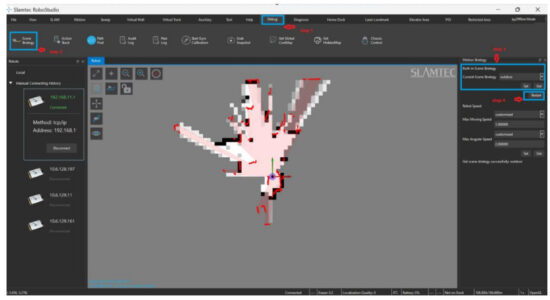
c. Before starting mapping, use API calls or RoboStudio to select appropriate strategies (refer to the above scenario description), and then start mapping testing after the service restarts. The specific setting method of RoboStudio
d. Aurora Initialization
Before starting the mapping, the system reports that vslam is initializing, and Aurora initialization operation needs to be performed. The specific initialization operation is as follows:
- Find an area with obvious features, face it, hold Aurora in an approximately horizontal state at a distance of 2-3m, and start initializing.
- Keep the handheld device stationary. Continue this operation until the exclamation mark disappears from the interactive interface. Start the formal mapping process, as shown in the figure below.
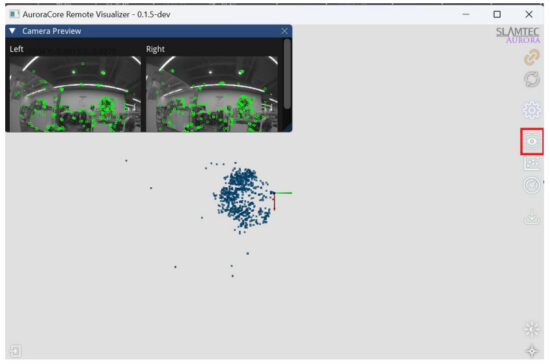
e. Use the aurora_remote to view point cloud, in the pop-up window, enter the IP 192.168.11.1 in the IP Address bar, and then click the “Connect” button to connect the device
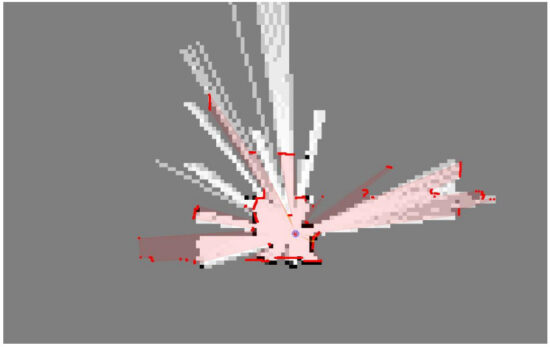
Click “Toggle Frame View” on the right toolbar to display the images and feature points observed by the camera
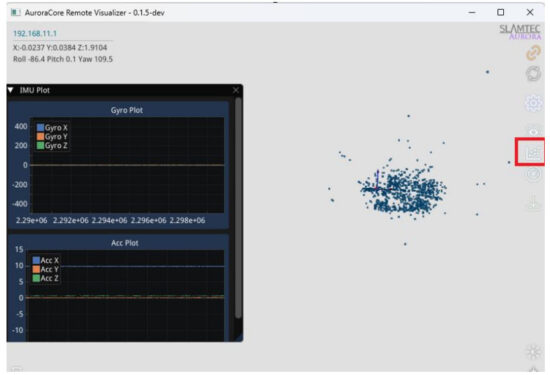
Click “Toggle IMU View” on the right toolbar to dynamically display the angular velocity of the Gyro gyroscope of the current test machine and the linear acceleration in the three axes (X, Y, Z) of the current test machine
f. Firmware upgrade
i. Power on Aurora device
ii. Connect the computer to Aurora hotspot or Ethernet
iii. Visit 192.168.11.1 browser and enter the following page
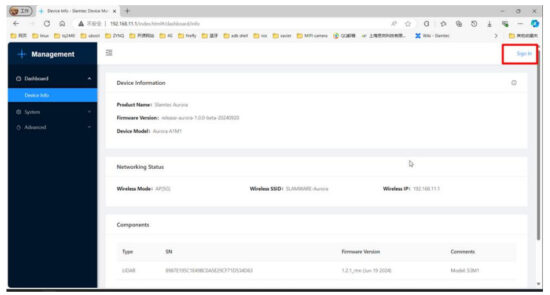
iv. Click “Sign in” to enter the login page
v. Enter account and password
vi. admin:admin111
vii. Click “System” → “Firmware Update” → “Select File” to select the upgraded firmware
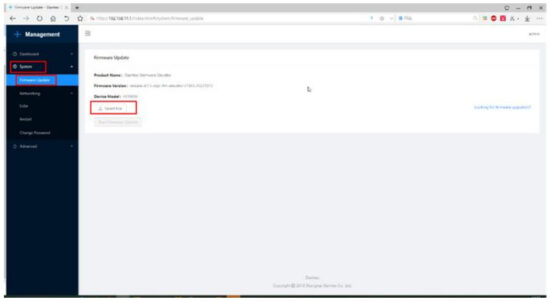
viii. Click “Start Firmware Update” to start upgrading the firmware.
ix. Wait for “success” to appear in the upgrade log, upgrade completed.
g. Use SDK for secondary development
SLAMTEC Aurora provides a rich set of SDK tools. Users can freely choose the appropriate SDK tool for secondary development, including:
- C++ SDK
- JAVA SDK
- ROS SDK
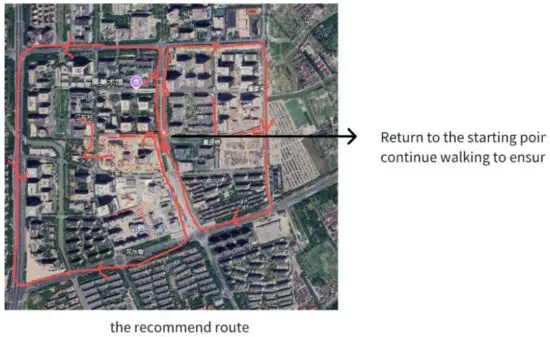
Typical scenario route planning suggestions
Overall acquisition route principle
➢ Ensure as many observations as possible during the scanning process
➢ Try to avoid scanning new areas as much as possible and take a certain loop
➢ Avoid the impact of dynamic objects as much as possible
➢ Walk as many closed-loop loops as possible
Notes:
- Please click the “Clear Map” button before preparing to create a complete newmap, otherwise the mapping optimization engine cannot be guaranteed to take effect
- After the loop returns to the origin, keep the robot moving and take more overlapping paths. Do not stop moving immediately
- After returning to the origin of the loop, if the map is not closed, continue to walk until it is closed
- For closed areas, avoid taking the old path and reduce memory consumption
- In and out
You need to enter and exit sideways to ensure that the laser and vision have a common view before entering, and better connect the data
Entering and exiting a confined space: After scanning a confined space, it is necessary to observe whether the reference objects are sufficient and whether the structural features are obvious during the scanning process.
If the above two conditions are not met, try to align the view towards a well- structured feature area when exiting, while avoiding any drastic changes in perspective.
Notes
Basic usage specifications
➢ SLAMTEC Aurora is a precision equipment. Falling or being hit by external forces may cause equipment damage, resulting in abnormal work or inaccurate accuracy, or even complete damage to the equipment
➢ It is recommended to use a soft dry cloth or a self-provided cleaning cloth to clean the equipment. Please keep the radar and lens parts clean and do not touch them directly with your hands
➢ Do not cover or touch the heat dissipation part of the body during use. When the device temperature is too high during use, it may work abnormally
Start the initialization phase
➢ During the initialization phase of equipment startup, it is necessary to ensure that the equipment is stable and free of shaking as much as possible.
➢ During initialization, Aurora should target areas with more features, and the distance should be within 2-3m, avoiding environments with fewer features such as open plains, refractive environments such as large areas of glass, and areas with more dynamic objects, in order to ensure sufficient initialization features and obtain better data results. After being stationary for 3 seconds and waiting for the system to be successfully initialized, start moving the device and enter the working state
Equipment working phase
➢ Avoid rapid rotation of the body or sudden stops, which may cause the equipment to also experience rapid and large deflection and shaking, which will affect the mapping accuracy and effect to a certain extent
➢ When scanning, it is recommended to walk at a normal walking speed. For situations with fewer features, narrow spaces, turns, etc., it is recommended to slow down
➢ Under normal walking conditions, the equipment should not tilt more than 20 ° as much as possible
➢ When scanning indoor scenes involving multiple rooms or floors, please open the indoor door in advance. When passing through the door, scan slowly and stay on the side of the door for a period of time to ensure that the features on both sides of the door can be scanned at the same time. If the door is not open during scanning, slowly turn around before approaching the door, turn the instrument away from the door, turn your back to open the door, and enter slowly
Revision history
| Date | Version | Description |
| 10/11/2024 | 1.0 | Initial Version |
![]()
Documents / Resources
 |
SLAMTEC Aurora Mapping and Localization Solution [pdf] User Manual Aurora Mapping and Localization Solution, Aurora, Mapping and Localization Solution, Localization Solution, Solution |