![]()
வரைபடமாக்கலின் புதிய சகாப்தம் மற்றும்
உள்ளூர்மயமாக்கல் தீர்வு

பயனர் கையேடு
மேலும் நிலையானது
மிகவும் துல்லியமானது
அதிக சக்தி வாய்ந்தது
ஷாங்காய் ஸ்லாம்டெக் கோ., லிமிடெட்
முடிந்துவிட்டதுview
அரோரா என்பது SLAMTEC ஆல் உருவாக்கப்பட்ட LIDAR, பார்வை, செயலற்ற வழிசெலுத்தல் மற்றும் ஆழமான கற்றல் தொழில்நுட்பங்களின் புதுமையான இணைவு ஆகும். இது மேம்பட்ட உள்ளூர்மயமாக்கல் மற்றும் மேப்பிங் புலனுணர்வு உணரிகளை ஒருங்கிணைக்கிறது, தொடக்கத்தில் வெளிப்புற சார்புகள் தேவையில்லை, உட்புற மற்றும் வெளிப்புற 3D உயர்-துல்லிய மேப்பிங் அமைப்புகளுக்கு ஆறு டிகிரி சுதந்திர உள்ளூர்மயமாக்கலை வழங்குகிறது. கூடுதலாக, அரோரா ஒரு விரிவான கருவித்தொகுப்புடன் வருகிறது, இதில் வரைகலை இடைமுக மென்பொருள் ரோபோஸ்டுடியோ மற்றும் இரண்டாம் நிலை மேம்பாட்டிற்கான SDK கருவித்தொகுப்புகள் அடங்கும், இது பயனர்கள் தனிப்பயனாக்கப்பட்ட பயன்பாடுகளை விரைவாக உருவாக்கவும் தயாரிப்பு வரிசைப்படுத்தலை துரிதப்படுத்தவும் உதவுகிறது. தயாரிப்பின் முக்கிய அம்சங்கள் பின்வருமாறு:
- Fusion LIDAR+ பைனாகுலர் பார்வை + IMU மல்டி-சோர்ஸ் ஃப்யூஷன் அல்காரிதம், வெளிப்புற விரிவாக்கத்தை ஆதரிக்கிறது (GPS/RTK, ஓடோமீட்டர், முதலியன)
- உட்புற மற்றும் வெளிப்புற 3D மேப்பிங் மற்றும் உள்ளூர்மயமாக்கல் செயல்பாடுகளை வழங்குதல்.
- 3D புலனுணர்வு திறன்களை மேம்படுத்த AI தொழில்நுட்பத்தை ஒருங்கிணைத்தல்.
- முழுமையான கருவித்தொகுப்புடன், கிளையன்ட் பக்க பயன்பாட்டு விரிவாக்கத்திற்கான ஆதரவு
- தொழில்துறையில் முன்னணி வகிக்கும் அமைப்பு நிலைத்தன்மை

1.1 செயல்பாட்டுக் கொள்கை மற்றும் பயன்பாடு
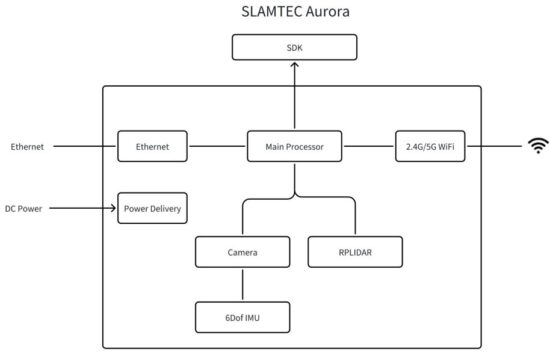
SLAMTEC அரோரா, Slamtec இன் LIDAR-vision-IMU இணைவின் தனித்துவமான SLAM வழிமுறையைப் பயன்படுத்துகிறது. காட்சி மற்றும் லேசர் பண்புகளை இணைத்து, இது வினாடிக்கு 10 முறைக்கு மேல் வரைபடத் தரவு இணைவைச் செய்ய முடியும் மற்றும் ஒரு மில்லியன் சதுர மீட்டர் வரை வரைபடத் தரவை வரைய முடியும். கணினி வரைபடம் கீழே காட்டப்பட்டுள்ளது. கணினியின் வெளியீட்டை இரண்டாம் நிலை மேம்பாட்டிற்கான கருவிச் சங்கிலியாக வரையறுக்கலாம், இதில் காட்சி தொடர்பு கருவிகள் Robostudio, C++ sdk, JAVA sdk, Restful API sdk, ROS sdk போன்றவை அடங்கும்.
அடிப்படை செயல்பாடு
2.1 நிறுவல் மற்றும் ஆய்வு
- உபகரணங்கள் மின்சாரம்
- இடைமுக மாதிரி: DC5521
- உள்ளீடு தொகுதிtage (தற்போதைய): DC12V (2A)
- சாதாரண மின்சார விநியோகத்தைப் பூர்த்தி செய்ய 12V-2A பவர் அடாப்டரைப் பயன்படுத்துவது பரிந்துரைக்கப்படுகிறது.
- வெளியீட்டு அளவு கொண்ட பேட்டரியைப் பயன்படுத்துவது பரிந்துரைக்கப்படுகிறது.tag12V மின்சக்தி மற்றும் 5000mAh க்கும் அதிகமான திறன் கொண்டது, இது 2 மணி நேரத்திற்கும் மேலான பேட்டரி ஆயுளுடன் சாதாரண மின்சார விநியோகத்தை பூர்த்தி செய்ய முடியும்.
செயல்பாட்டு விசை செயல்பாடு
| செயல்பாடு | பொத்தான் செயல்பாடு | சாதனத்தின் நிலை |
| காத்திருப்பு | சாதனத்தை காத்திருப்பு பயன்முறையில் வைக்க பவர் பட்டனை நீண்ட நேரம் அழுத்தவும். | காட்டி விளக்கு அணைந்து சாதனம் காத்திருப்பு பயன்முறையில் நுழைகிறது. |
| பவர் ஆன் | சாதனம் காத்திருப்பு பயன்முறையில் நுழைந்த பிறகு, பவர் பயன்முறையில் நுழைய சுருக்கமாக அழுத்தவும். | காட்டி விளக்கு சிவப்பு நிறத்தில் இருந்து மஞ்சள் நிறமாக மாறி, சாதன துவக்கத்திற்குள் நுழைகிறது.tage |
| சஸ்பெண்ட் | சாதனத்தின் இடைநிறுத்தப்பட்ட செயல்பாட்டு நிலையை உள்ளிட இடைநிறுத்த பொத்தானைச் சுருக்கமாக அழுத்தவும். | காட்டி விளக்கு பச்சை நிறத்தில் ஒளிரும் |
காட்டி ஒளி விளக்கம்
| சாதன ஒளி மினுமினுப்பு முறை | விளக்கம் |
| சிவப்பு எப்போதும் பிரகாசமாக இருக்கும் | துவக்குகிறது |
| மஞ்சள் ஃப்ளிக்கர் | துவக்கம் முடிந்தது, சாதனம் துவக்க கட்டத்தில் நுழைகிறது. |
| மஞ்சள் நீளமான பிரகாசமான | கணினி துவக்கம் முடிந்தது, மேப்பிங்கைத் தொடங்க காத்திருக்கிறது. |
| பச்சை எப்போதும் பிரகாசமாக இருக்கும் | வேலையில் |
| சிவப்பு ஒளிரும் | சாதன விதிவிலக்கு |
| பச்சை ஒளிரும் | சாதனத்தை இடைநிறுத்த இடைநிறுத்த பொத்தானை அழுத்தவும். |
காட்சி உத்தி விளக்கம்
அரோரா மூன்று காட்சி மாறுதல் முறைகளை ஆதரிக்கிறது. பயன்பாட்டு விளைவை உறுதிசெய்ய பயனர்கள் கீழே உள்ள விளக்கத்தின்படி காட்சிகளை மாற்றலாம். கணினி உட்புறக் கொள்கையைப் பயன்படுத்துவதற்கு இயல்புநிலையாகிறது.
| காட்சி வகை | உட்புறம் | பெரிய அளவிலான உட்புறம் | வெளிப்புற |
| காட்சி அம்சங்கள் | லேசர் கண்காணிப்பு ஒப்பீட்டளவில் பணக்காரமானது, மேலும் சூழலில் இதே போன்ற பல காட்சிகள் உள்ளன, அவை தவறான மூடல் பிரச்சனை காட்சிகள் |
காட்சி அகலமானது, மேலும் அது எளிதானது லேசர் கண்காணிப்பு வரம்பை மீறுகிறது. ஒட்டுமொத்த கவனிப்பு ஒப்பீட்டளவில் குறைவாக உள்ளது, மேலும் சூழல் மாறக்கூடியது. |
திறந்தவெளி, பெரிய காட்சிப் பகுதி, பல்வேறு நிலப்பரப்புகள் தழுவல்கள் உள்ளன |
| வழக்கமான சூழ்நிலை | அலுவலக கட்டிடங்கள், அலுவலகங்கள், அரசு மையங்கள்/மருத்துவ நிறுவனங்கள்/ஹோட்டல்கள் போன்றவை |
பெரிய வாகன நிறுத்துமிடங்கள், ஷாப்பிங் மால்கள், சுரங்கப்பாதை நிலையங்கள், காத்திருப்பு அரங்குகள், அரசு மையங்கள்/மருத்துவ நிறுவனங்கள்/ஹோட்டல் லாபிகள் பெரிய அளவில் பகுதிகள் (கண்காணிப்பு வரம்பிற்கு அப்பாற்பட்ட ரேடார்), முதலியன |
வழக்கமான வெளிப்புற காட்சிகள், பூங்காக்கள், தெருக்கள், புல்வெளிகள் போன்றவை, வட்ட அரங்கங்கள் மற்றும் உடற்பயிற்சி கூடங்கள் போன்ற சில உட்புற இடங்கள், ஒட்டுமொத்த பரப்பளவைக் கொண்டுள்ளன. |
2.2 சாதன இணைப்பு மற்றும் பயிற்சி
தயாரிப்பு வேலை
அ. Robostudio, Remote UI ஐப் பதிவிறக்கவும்
தயவுசெய்து அதிகாரியிடம் செல்லுங்கள் webபதிவிறக்கம் செய்ய வேண்டிய தளம் ரோபோஸ்டுடியோ அளவிடக்கூடிய ரோபோ மேலாண்மை மற்றும் மேம்பாட்டு மென்பொருள் | SLAMTEC , ரிமோட் UI என்பது SLAMTEC ஆல் உருவாக்கப்பட்ட ஒரு வரைகலை தொடர்பு மென்பொருளாகும், பயனர்கள் ரோபோஸ்டுடியோவைப் பயன்படுத்தி அரோராவுடன் இணைப்பை ஏற்படுத்தலாம், மேப்பிங் பொசிஷனிங் கண்காணிப்பு மற்றும் பதிவேற்ற உள்ளமைவை அடையலாம். fileகள் மற்றும் பிற செயல்பாடுகள்
b. கைப்பிடியை அரோராவுடன் இணைத்து, சாதனம் இயக்கப்பட்ட பிறகு அதைப் பயன்படுத்தவும்.
அடிப்படை செயல்பாடுகள்
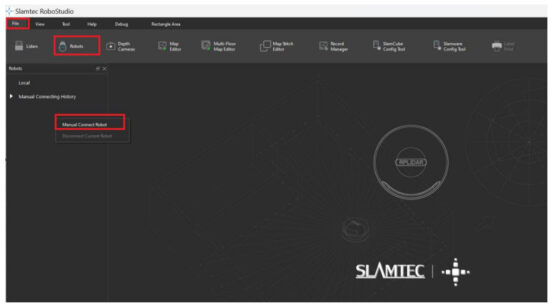
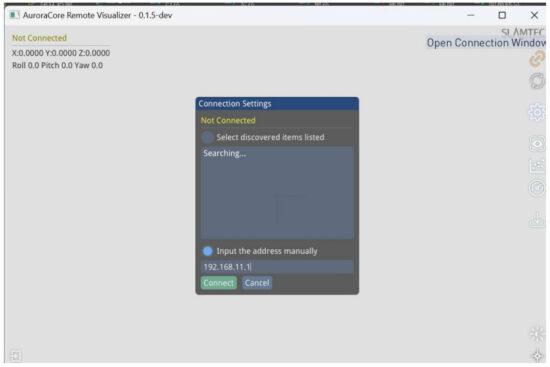
a. ரோபோஸ்டுடியோ இணைப்பு சாதனத்தைத் தொடங்கவும்
b. பாப்-அப் சாளரத்தில், IP முகவரிப் பட்டியில் IP 192.168.11.1 ஐ உள்ளிட்டு, சாதனத்தை இணைக்க “இணை” பொத்தானைக் கிளிக் செய்யவும்.
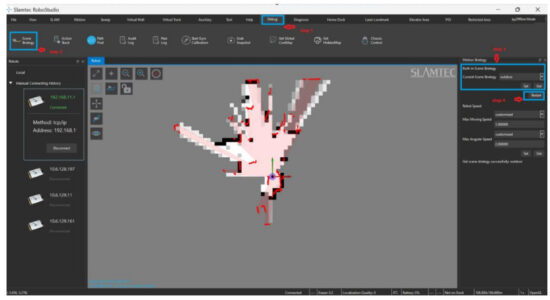
c. மேப்பிங்கைத் தொடங்குவதற்கு முன், பொருத்தமான உத்திகளைத் தேர்ந்தெடுக்க API அழைப்புகள் அல்லது RoboStudio ஐப் பயன்படுத்தவும் (மேலே உள்ள சூழ்நிலை விளக்கத்தைப் பார்க்கவும்), பின்னர் சேவை மறுதொடக்கம் செய்யப்பட்ட பிறகு மேப்பிங் சோதனையைத் தொடங்கவும். RoboStudio இன் குறிப்பிட்ட அமைப்பு முறை
ஈ. அரோரா துவக்கம்
மேப்பிங்கைத் தொடங்குவதற்கு முன், vslam துவக்கப்படுவதாகவும், Aurora துவக்க செயல்பாட்டைச் செய்ய வேண்டும் என்றும் கணினி தெரிவிக்கிறது. குறிப்பிட்ட துவக்க செயல்பாடு பின்வருமாறு:
- வெளிப்படையான அம்சங்களைக் கொண்ட ஒரு பகுதியைக் கண்டுபிடித்து, அதை எதிர்கொள்ளுங்கள், அரோராவை 2-3 மீ தொலைவில் தோராயமாக கிடைமட்ட நிலையில் பிடித்து, துவக்கத் தொடங்குங்கள்.
- கையடக்க சாதனத்தை நிலையாக வைத்திருங்கள். ஊடாடும் இடைமுகத்திலிருந்து ஆச்சரியக்குறி மறையும் வரை இந்த செயல்பாட்டைத் தொடரவும். கீழே உள்ள படத்தில் காட்டப்பட்டுள்ளபடி, முறையான மேப்பிங் செயல்முறையைத் தொடங்கவும்.
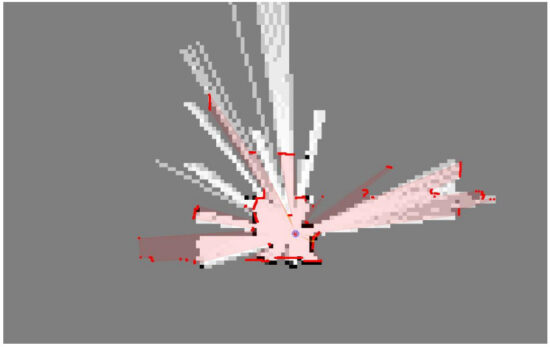
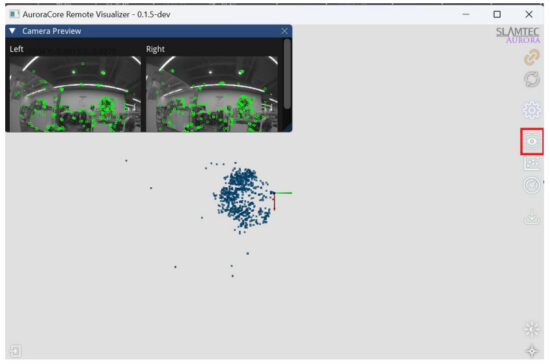
e. aurora_remote ஐப் பயன்படுத்தி view பாயிண்ட் கிளவுட், பாப்-அப் சாளரத்தில், ஐபி முகவரி பட்டியில் ஐபி 192.168.11.1 ஐ உள்ளிட்டு, பின்னர் சாதனத்தை இணைக்க “இணை” பொத்தானைக் கிளிக் செய்யவும்.
"சட்டகத்தை மாற்று" என்பதைக் கிளிக் செய்யவும். Viewகேமராவால் கவனிக்கப்பட்ட படங்கள் மற்றும் அம்சப் புள்ளிகளைக் காண்பிக்க வலது கருவிப்பட்டியில் ”
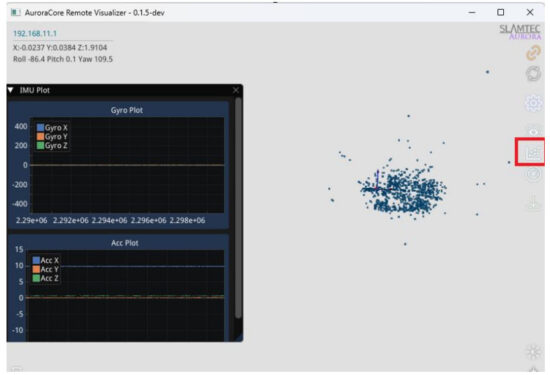
“IMU ஐ மாற்று” என்பதைக் கிளிக் செய்யவும். View"வலது கருவிப்பட்டியில், தற்போதைய சோதனை இயந்திரத்தின் கைரோ கைரோஸ்கோப்பின் கோண வேகத்தையும், தற்போதைய சோதனை இயந்திரத்தின் மூன்று அச்சுகளில் (X, Y, Z) நேரியல் முடுக்கத்தையும் மாறும் வகையில் காண்பிக்கவும்.
f. நிலைபொருள் மேம்படுத்தல்
i. அரோரா சாதனத்தை இயக்கவும்.
ii. கணினியை அரோரா ஹாட்ஸ்பாட் அல்லது ஈதர்நெட்டுடன் இணைக்கவும்.
iii. 192.168.11.1 உலாவியைப் பார்வையிட்டு பின்வரும் பக்கத்தை உள்ளிடவும்.
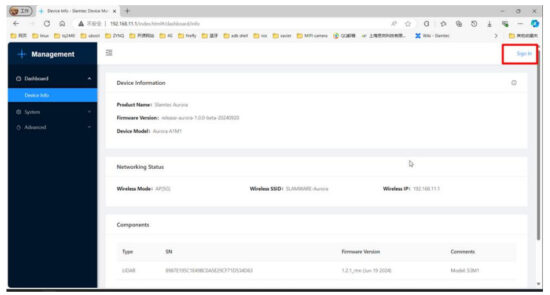
iv. உள்நுழைவுப் பக்கத்திற்குள் நுழைய “உள்நுழை” என்பதைக் கிளிக் செய்யவும்.
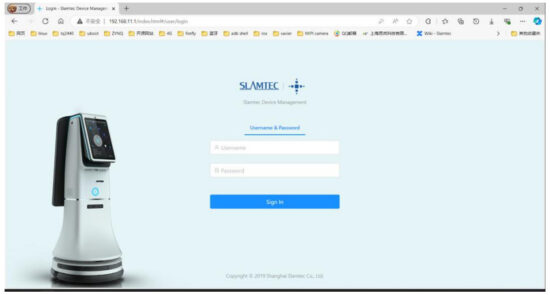
v. கணக்கு மற்றும் கடவுச்சொல்லை உள்ளிடவும்.
vi. நிர்வாகி: நிர்வாகி111
vii. “கணினி” → “நிலைபொருள் புதுப்பிப்பு” → “தேர்ந்தெடு” என்பதைக் கிளிக் செய்யவும் File” மேம்படுத்தப்பட்ட நிலைபொருளைத் தேர்ந்தெடுக்க
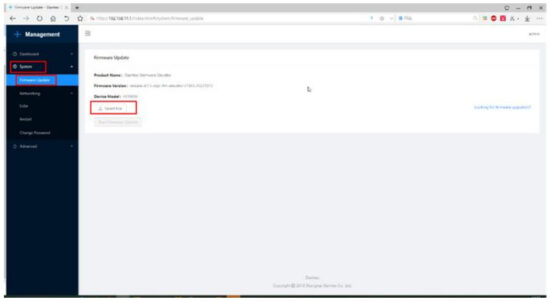
viii. ஃபார்ம்வேரை மேம்படுத்தத் தொடங்க "ஃபர்ம்வேர் புதுப்பிப்பைத் தொடங்கு" என்பதைக் கிளிக் செய்யவும்.
ix. மேம்படுத்தல் பதிவில் "வெற்றி" தோன்றும் வரை காத்திருங்கள், மேம்படுத்தல் முடிந்தது.
எ.கா. இரண்டாம் நிலை மேம்பாட்டிற்கு SDK ஐப் பயன்படுத்தவும்.
SLAMTEC Aurora SDK கருவிகளின் வளமான தொகுப்பை வழங்குகிறது. பயனர்கள் இரண்டாம் நிலை மேம்பாட்டிற்கு பொருத்தமான SDK கருவியை சுதந்திரமாக தேர்வு செய்யலாம், அவற்றுள்:
- சி++ எஸ்டிகே
- ஜாவா SDK
- ROS SDK
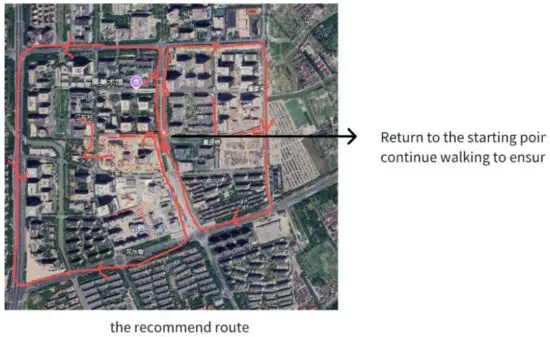
வழக்கமான சூழ்நிலை பாதை திட்டமிடல் பரிந்துரைகள்
ஒட்டுமொத்த கையகப்படுத்தல் பாதை கொள்கை
➢ ஸ்கேனிங் செயல்பாட்டின் போது முடிந்தவரை பல அவதானிப்புகளை உறுதி செய்யவும்.
➢ புதிய பகுதிகளை ஸ்கேன் செய்வதை முடிந்தவரை தவிர்க்க முயற்சி செய்து, ஒரு குறிப்பிட்ட சுழற்சியை எடுக்கவும்.
➢ முடிந்தவரை மாறும் பொருட்களின் தாக்கத்தைத் தவிர்க்கவும்.
➢ முடிந்தவரை பல மூடிய-லூப் சுழல்களை நடத்துங்கள்
குறிப்புகள்:
- முழுமையான புதிய வரைபடத்தை உருவாக்கத் தயாராவதற்கு முன் "வரைபடத்தை அழி" பொத்தானைக் கிளிக் செய்யவும், இல்லையெனில் மேப்பிங் உகப்பாக்க இயந்திரம் செயல்படுவதற்கு உத்தரவாதம் அளிக்க முடியாது.
- சுழற்சி அதன் தொடக்க இடத்திற்குத் திரும்பிய பிறகு, ரோபோவை நகர்த்தி, மேலும் ஒன்றுடன் ஒன்று சேரும் பாதைகளில் செல்லவும். உடனடியாக நகர்வதை நிறுத்த வேண்டாம்.
- லூப்பின் தோற்றத்திற்குத் திரும்பிய பிறகு, வரைபடம் மூடப்படவில்லை என்றால், அது மூடப்படும் வரை தொடர்ந்து நடக்கவும்.
- மூடிய பகுதிகளுக்கு, பழைய பாதையைத் தவிர்த்து, நினைவக நுகர்வைக் குறைக்கவும்.
- உள்ளேயும் வெளியேயும்
லேசர் மற்றும் பார்வை பொதுவானதாக இருப்பதை உறுதிசெய்ய நீங்கள் பக்கவாட்டில் நுழைந்து வெளியேற வேண்டும். view உள்ளிடுவதற்கு முன், தரவை சிறப்பாக இணைக்கவும்
வரையறுக்கப்பட்ட இடத்திற்குள் நுழைந்து வெளியேறுதல்: வரையறுக்கப்பட்ட இடத்தை ஸ்கேன் செய்த பிறகு, குறிப்புப் பொருள்கள் போதுமானதா என்பதையும், ஸ்கேன் செய்யும் போது கட்டமைப்பு அம்சங்கள் தெளிவாகத் தெரிகின்றனவா என்பதையும் கவனிக்க வேண்டியது அவசியம்.
மேலே உள்ள இரண்டு நிபந்தனைகள் பூர்த்தி செய்யப்படாவிட்டால், சீரமைக்க முயற்சிக்கவும் view வெளியேறும்போது நன்கு கட்டமைக்கப்பட்ட அம்சப் பகுதியை நோக்கி, அதே நேரத்தில் பார்வையில் எந்த கடுமையான மாற்றங்களையும் தவிர்க்கவும்.
குறிப்புகள்
அடிப்படை பயன்பாட்டு விவரக்குறிப்புகள்
➢ SLAMTEC அரோரா என்பது ஒரு துல்லியமான உபகரணமாகும். வெளிப்புற சக்திகளால் விழுவது அல்லது தாக்கப்படுவது உபகரணங்களுக்கு சேதத்தை ஏற்படுத்தக்கூடும், இதன் விளைவாக அசாதாரண வேலை அல்லது துல்லியமற்ற துல்லியம் அல்லது உபகரணங்களுக்கு முழுமையான சேதம் ஏற்படலாம்.
➢ உபகரணங்களை சுத்தம் செய்ய மென்மையான உலர்ந்த துணி அல்லது சுயமாக தயாரிக்கப்பட்ட துப்புரவு துணியைப் பயன்படுத்துவது பரிந்துரைக்கப்படுகிறது. ரேடார் மற்றும் லென்ஸ் பாகங்களை சுத்தமாக வைத்திருங்கள், அவற்றை உங்கள் கைகளால் நேரடியாகத் தொடாதீர்கள்.
➢ பயன்பாட்டின் போது உடலின் வெப்பச் சிதறல் பகுதியை மூடவோ அல்லது தொடவோ கூடாது. பயன்பாட்டின் போது சாதனத்தின் வெப்பநிலை அதிகமாக இருக்கும்போது, அது அசாதாரணமாக வேலை செய்யக்கூடும்.
துவக்க கட்டத்தைத் தொடங்குங்கள்
➢ உபகரண தொடக்கத்தின் துவக்க கட்டத்தில், உபகரணங்கள் நிலையாகவும், முடிந்தவரை அசைவின்றியும் இருப்பதை உறுதி செய்வது அவசியம்.
➢ துவக்கத்தின் போது, போதுமான துவக்க அம்சங்களை உறுதி செய்வதற்கும் சிறந்த தரவு முடிவுகளைப் பெறுவதற்கும், திறந்தவெளி சமவெளிகள், பெரிய கண்ணாடிப் பகுதிகள் போன்ற ஒளிவிலகல் சூழல்கள் மற்றும் அதிக ஆற்றல்மிக்க பொருள்களைக் கொண்ட பகுதிகள் போன்ற குறைவான அம்சங்களைக் கொண்ட சூழல்களைத் தவிர்த்து, அதிக அம்சங்களைக் கொண்ட பகுதிகளை அரோரா குறிவைக்க வேண்டும், மேலும் தூரம் 2-3 மீட்டருக்குள் இருக்க வேண்டும். 3 வினாடிகள் நிலையாக இருந்து, கணினி வெற்றிகரமாக துவக்கப்படும் வரை காத்திருந்த பிறகு, சாதனத்தை நகர்த்தத் தொடங்கி வேலை செய்யும் நிலைக்குச் செல்லவும்.
உபகரண செயல்பாட்டு கட்டம்
➢ உடலின் விரைவான சுழற்சி அல்லது திடீர் நிறுத்தங்களைத் தவிர்க்கவும், இது உபகரணங்களில் விரைவான மற்றும் பெரிய விலகல் மற்றும் குலுக்கலை ஏற்படுத்தக்கூடும், இது மேப்பிங் துல்லியத்தையும் விளைவையும் ஒரு குறிப்பிட்ட அளவிற்கு பாதிக்கும்.
➢ ஸ்கேன் செய்யும் போது, சாதாரண நடை வேகத்தில் நடக்க பரிந்துரைக்கப்படுகிறது. குறைவான அம்சங்கள், குறுகிய இடங்கள், திருப்பங்கள் போன்ற சூழ்நிலைகளுக்கு, வேகத்தைக் குறைக்க பரிந்துரைக்கப்படுகிறது.
➢ சாதாரண நடைபயிற்சி நிலைமைகளின் கீழ், உபகரணங்கள் முடிந்தவரை 20°க்கு மேல் சாய்ந்திருக்கக்கூடாது.
➢ பல அறைகள் அல்லது தளங்களை உள்ளடக்கிய உட்புற காட்சிகளை ஸ்கேன் செய்யும்போது, தயவுசெய்து உட்புறக் கதவை முன்கூட்டியே திறக்கவும். கதவைக் கடந்து செல்லும்போது, மெதுவாக ஸ்கேன் செய்து, கதவின் இருபுறமும் உள்ள அம்சங்களை ஒரே நேரத்தில் ஸ்கேன் செய்ய முடியும் என்பதை உறுதிப்படுத்த சிறிது நேரம் கதவின் பக்கவாட்டில் இருங்கள். ஸ்கேன் செய்யும் போது கதவு திறக்கப்படாவிட்டால், கதவை நெருங்குவதற்கு முன்பு மெதுவாகத் திரும்பி, கருவியை கதவிலிருந்து விலக்கி, கதவைத் திறக்க உங்கள் முதுகைத் திருப்பி, மெதுவாக உள்ளே நுழையவும்.
சரிபார்ப்பு வரலாறு
| தேதி | பதிப்பு | விளக்கம் |
| 10/11/2024 | 1.0 | ஆரம்ப பதிப்பு |
![]()
ஆவணங்கள் / ஆதாரங்கள்
 |
SLAMTEC அரோரா மேப்பிங் மற்றும் உள்ளூர்மயமாக்கல் தீர்வு [pdf] பயனர் கையேடு அரோரா மேப்பிங் மற்றும் உள்ளூர்மயமாக்கல் தீர்வு, அரோரா, மேப்பிங் மற்றும் உள்ளூர்மயமாக்கல் தீர்வு, உள்ளூர்மயமாக்கல் தீர்வு, தீர்வு |