![]()
Era Anyar Pemetaan lan
solusi lokalisasi

Manual pangguna
Luwih Stabil
Luwih Akurat
Luwih Kuat
Shanghai Slamtec Co.,Ltd
Swaraview
Aurora minangka gabungan inovatif saka LIDAR, visi, navigasi inersia, lan teknologi sinau jero sing dikembangake dening SLAMTEC. Iki nggabungake sensor persepsi lokalisasi lan pemetaan, nawakake lokalisasi kebebasan enem derajat kanggo sistem pemetaan presisi dhuwur 3D njero ruangan lan ruangan, tanpa ketergantungan eksternal sing dibutuhake nalika wiwitan. Kajaba iku, Aurora dilengkapi toolchain lengkap, kalebu piranti lunak antarmuka grafis RoboStudio lan toolkit SDK kanggo pangembangan sekunder, ngidini pangguna nggawe aplikasi sing disesuaikan kanthi cepet lan nyepetake penyebaran produk. Fitur utama produk kalebu:
- Fusion LIDAR+ binocular vision + IMU multi-source fusion algoritma, ndhukung ekspansi eksternal (GPS/RTK, odometer, lsp.)
- Nyedhiyakake pemetaan 3D ing njero ruangan lan ruangan lan fungsi lokalisasi
- Integrasi teknologi AI kanggo nambah kapabilitas persepsi 3D
- Kanthi toolchain lengkap, dhukungan kanggo ekspansi aplikasi sisih klien
- Stabilitas sistem sing unggul ing industri

1.1 Prinsip Kerja lan Panggunaan
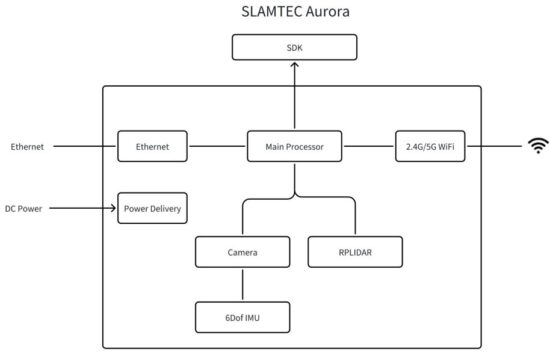
SLAMTEC Aurora nggunakake algoritma SLAM unik saka gabungan LIDAR-vision-IMU saka Slamtec. Nggabungake karakteristik visual lan laser, bisa nindakake fusi data peta luwih saka 10 kaping per detik lan tarik nganti siji yuta meter persegi data peta. Diagram sistem kapacak ing ngisor iki. Output sistem bisa ditetepake minangka toolchain kanggo pangembangan sekunder, kalebu alat interaksi visual Robostudio, C++ sdk, JAVA sdk, Restful API sdk, ROS sdk, lsp.
Operasi dhasar
2.1 Instalasi lan Inspeksi
- Pasokan daya peralatan
- Model antarmuka: DC5521
- Input voltage (saiki): DC12V (2A)
- Disaranake nggunakake adaptor daya 12V-2A kanggo nyukupi sumber daya normal
- Disaranake nggunakake baterei kanthi vol outputtage saka 12V lan kapasitas luwih saka 5000mAh, sing bisa nyukupi sumber daya normal kanthi umur baterei luwih saka 2 jam
Operasi tombol fungsi
| Fungsi | Operasi tombol | Status piranti |
| siyaga | Pencet dawa tombol daya kanggo nyelehake piranti menyang mode siyaga | Lampu indikator mati lan piranti mlebu mode siyaga |
| Daya urip | Sawise piranti mlebu mode siyaga, penet cendhak kanggo ngetik mode daya | Lampu indikator ganti saka abang dadi kuning sumunar, mlebu ing wiwitan piranti stage |
| nundha | Pencet sedhela tombol ngaso kanggo ngetik kahanan kerja piranti sing ngaso. | Lampu indikator sumunar ijo |
Deskripsi lampu indikator
| Mode sumunar cahya piranti | Katrangan |
| Abang tansah padhang | Booting munggah |
| Kelip-kelip kuning | Boot rampung, piranti mlebu fase inisialisasi |
| Kuning dawa padhang | Inisialisasi sistem rampung, ngenteni kanggo miwiti pemetaan |
| Ijo tansah padhang | Ing karya |
| Kelip-kelip abang | Pangecualian piranti |
| Ijo sumunar | Pencet tombol ngaso kanggo ngaso piranti |
Katrangan strategi pemandangan
Aurora ndhukung telung mode ngoper pemandangan. Pangguna bisa ngalih pemandangan miturut katrangan ing ngisor iki kanggo njamin efek panggunaan. Sistem standar nggunakake kabijakan njero ruangan.
| Kategori adegan | njero ruangan | Large_scale_indoor | njaba ruangan |
| Fitur pemandangan | Pengamatan laser relatif sugih, lan ana akeh pemandangan padha ing lingkungan, kang rawan kanggo adegan masalah penutupan sing salah |
Pemandangan iku amba, lan iku gampang kanggo ngluwihi jangkoan pengamatan laser. Pengamatan sakabèhé relatif jarang, lan lingkungan bisa diganti |
Open, area pemandangan gedhe, macem-macem terrain adaptasi ana |
| Skenario khas | Gedung kantor, kantor, pemerintah pusat / institusi medis / hotel, lsp |
Parkir gedhe, mall, stasiun sepur, aula tunggu, pusat pamaréntah / institusi medical / lobi hotel karo gedhe wilayah (radar ngluwihi jarak pengamatan), lsp |
Pemandangan ruangan, taman, dalan, pekarangan, lan liya-liyane, sawetara papan njero ruangan, kayata stadion bunder lan gimnasium, duwe area umum sing luwih gedhe. |
2.2 Sambungan piranti lan Tutorial
Karya persiapan
a. Unduh Robostudio, Remote UI
Mangga menyang pejabat websitus kanggo ngundhuh RoboStudio scalable manajemen robot lan piranti lunak pangembangan | SLAMTEC , Remote UI minangka piranti lunak interaksi grafis sing dikembangake dening SLAMTEC, pangguna bisa nggunakake Robostudio kanggo nggawe sambungan karo Aurora, kanggo entuk pemantauan posisi pemetaan lan konfigurasi upload. files lan fungsi liyane
b. Sambungake gagang menyang Aurora lan gunakake sawise piranti urip
Operasi dhasar
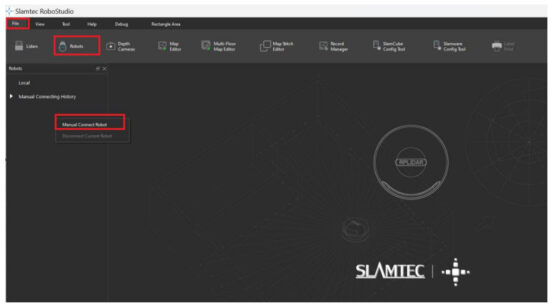
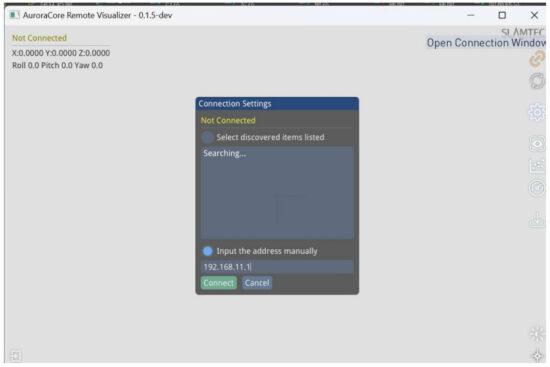
a. Miwiti Piranti Sambung RoboStudio
b. Ing jendhela pop-up, ketik IP 192.168.11.1 ing garis Alamat IP lan klik tombol "Sambungake" kanggo nyambungake piranti.
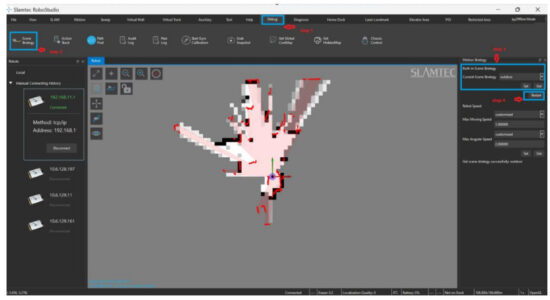
c. Sadurunge miwiti pemetaan, gunakake panggilan API utawa RoboStudio kanggo milih strategi sing cocog (waca deskripsi skenario ing ndhuwur), banjur miwiti tes pemetaan sawise layanan diwiwiti maneh. Cara setelan tartamtu saka RoboStudio
d. Inisialisasi Aurora
Sadurunge miwiti pemetaan, sistem nglaporake yen vslam diwiwiti, lan operasi inisialisasi Aurora kudu ditindakake. Operasi inisialisasi spesifik kaya ing ngisor iki:
- Temokake area kanthi fitur sing jelas, ngadhepi, tahan Aurora ing kahanan horisontal kanthi jarak 2-3m, lan miwiti miwiti.
- Tansah piranti genggem ing posisi stasioner. Terusake operasi iki nganti tandha seru ilang saka antarmuka interaktif. Miwiti proses pemetaan resmi, kaya sing ditampilake ing gambar ing ngisor iki.
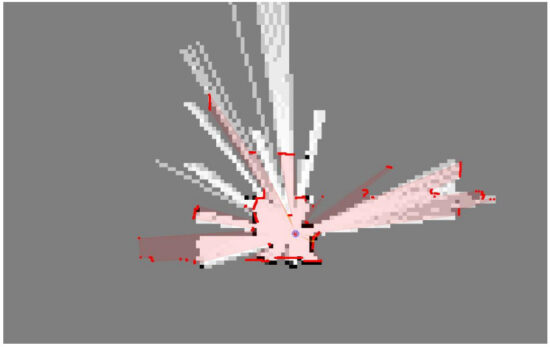
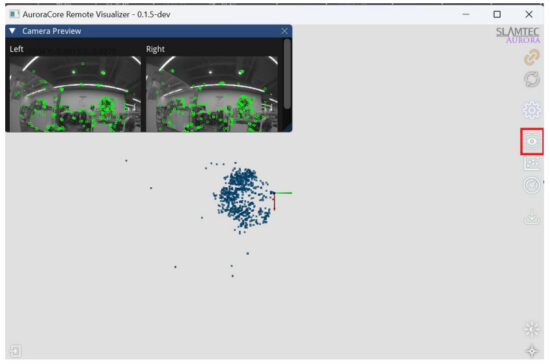
e. Gunakake aurora_remote kanggo view awan titik, ing jendela pop-up, ketik IP 192.168.11.1 ing garis Alamat IP, banjur klik tombol "Sambungake" kanggo nyambungake piranti.
Klik "Toggle Frame View” ing toolbar tengen kanggo nampilake gambar lan titik fitur sing diamati dening kamera
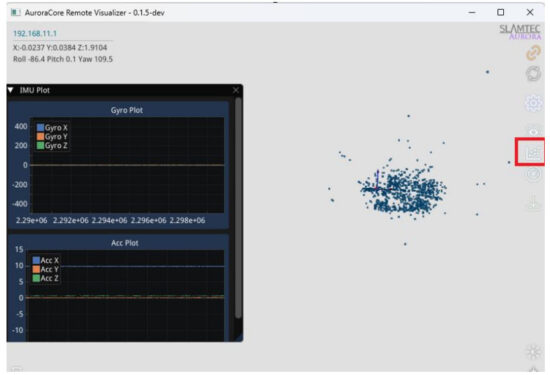
Klik "Toggle IMU View"ing toolbar tengen kanggo nampilake kanthi dinamis kecepatan sudut giroskop Gyro saka mesin tes saiki lan akselerasi linear ing telung sumbu (X, Y, Z) saka mesin uji saiki
f. Nganyari firmware
i. Daya ing piranti Aurora
ii. Sambungake komputer menyang hotspot Aurora utawa Ethernet
iii. Dolan maring 192.168.11.1 browser lan ketik kaca ing ngisor iki
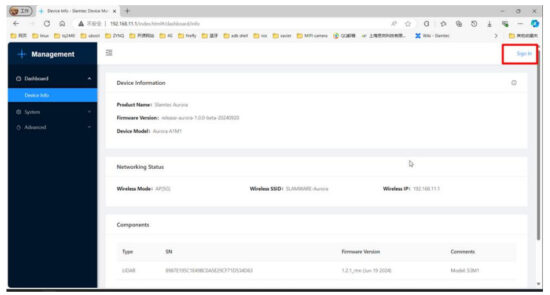
iv. Klik "Mlebu" kanggo mlebu kaca mlebu
v. Ketik akun lan sandhi
vi. admin: admin111
vii. Klik “System” → “Firmware Update” → “Select File” kanggo milih perangkat kukuh sing dianyari
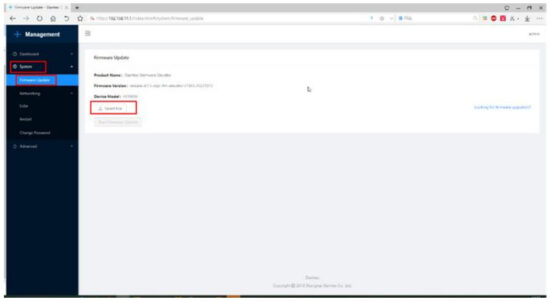
vii. Klik "Mulai Nganyari Firmware" kanggo miwiti nganyarke perangkat kukuh.
ix. Ngenteni "sukses" katon ing log upgrade, upgrade rampung.
g. Gunakake SDK kanggo pangembangan sekunder
SLAMTEC Aurora nyedhiyakake piranti SDK sing sugih. Pangguna bisa kanthi bebas milih alat SDK sing cocog kanggo pangembangan sekunder, kalebu:
- C++ SDK
- JAVA SDK
- ROS SDK
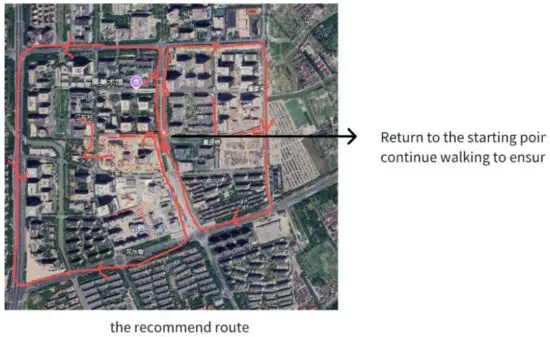
Saran rencana rute skenario khas
Prinsip rute akuisisi sakabèhé
➢ Priksa manawa pengamatan sabisa sajrone proses scanning
➢ Coba aja mindhai area anyar sabisa-bisa lan njupuk loop tartamtu
➢ Nyingkiri pengaruh obyek dinamis sabisa-bisa
➢ Mlaku-mlaku saakeh-akehe loop tertutup
Cathetan:
- Mangga klik tombol "Clear Map" sadurunge nyiapake nggawe newmap lengkap, yen ora mesin optimasi pemetaan ora bisa dijamin kanggo efek.
- Sawise daur ulang bali menyang asal, supaya robot obah lan njupuk dalan liyane tumpang tindih. Aja mandheg obah langsung
- Sawise bali menyang asal gelung, yen peta ora ditutup, terus mlaku nganti ditutup
- Kanggo wilayah sing ditutup, aja njupuk dalan lawas lan nyuda konsumsi memori
- mlebu lan metu
Sampeyan kudu mlebu lan metu miring kanggo mesthekake yen laser lan sesanti duwe umum view sadurunge ngetik, lan luwih nyambungake data
Mlebet lan metu saka papan sing diwatesi: Sawise mindhai papan sing dikurung, perlu kanggo mirsani apa obyek referensi cukup lan apa fitur struktural katon nalika proses mindhai.
Yen loro kondisi ing ndhuwur ora ketemu, nyoba kanggo kempal ing view menyang area fitur sing terstruktur kanthi apik nalika metu, nalika ngindhari owah-owahan drastis ing perspektif.
Cathetan
Spesifikasi panggunaan dhasar
➢ SLAMTEC Aurora minangka piranti presisi. Mudhun utawa kena pengaruh eksternal bisa nyebabake karusakan peralatan, nyebabake karya sing ora normal utawa akurasi sing ora akurat, utawa malah ngrusak peralatan.
➢ Disaranake nggunakake kain garing sing alus utawa kain pembersih sing disedhiyakake dhewe kanggo ngresiki peralatan. Mangga njaga bagean radar lan lensa tetep resik lan aja langsung didemek nganggo tangan
➢ Aja nutupi utawa ndemek bagean boros panas ing awak nalika digunakake. Yen suhu piranti dhuwur banget nalika digunakake, bisa uga ora normal
Miwiti fase initialization
➢ Sajrone fase inisialisasi wiwitan peralatan, perlu kanggo mesthekake yen peralatan kasebut stabil lan ora goyang sabisa-bisa.
➢ Sajrone initialization, Aurora kudu ngarahake wilayah kanthi fitur liyane, lan jarak kudu ing 2-3m, ngindhari lingkungan karo fitur kurang kayata dataran mbukak, lingkungan bias kayata area gedhe saka kaca, lan wilayah karo obyek luwih dinamis, supaya kanggo mesthekake fitur initialization cukup lan entuk asil data sing luwih apik. Sawise dadi stasioner sajrone 3 detik lan ngenteni sistem bisa diinisialisasi kanthi sukses, wiwiti obah piranti lan ketik kahanan kerja.
Fase kerja peralatan
➢ Ngindhari rotasi awak kanthi cepet utawa mandheg, sing bisa nyebabake peralatan uga ngalami defleksi lan goyang sing cepet lan gedhe, sing bakal mengaruhi akurasi lan efek pemetaan nganti sawetara.
➢ Nalika mindhai, disaranake lumaku kanthi kacepetan mlaku normal. Kanggo kahanan kanthi fitur sing luwih sithik, spasi sing sempit, giliran, lsp, disaranake alon-alon
➢ Ing kahanan lumampah normal, peralatan ngirim ora ngiringake luwih saka 20 ° sabisa
➢ Nalika mindhai pemandangan njero ruangan sing nglibatake pirang-pirang ruangan utawa lantai, bukak lawang njero ruangan luwih dhisik. Nalika ngliwati lawang, pindai alon-alon lan tetep ing sisih lawang kanggo sawetara wektu kanggo mesthekake yen fitur ing loro-lorone lawang bisa dipindai bebarengan. Yen lawang ora mbukak nalika mindhai, alon-alon mundur alon-alon sadurunge nyedhaki lawang, nguripake instrumen saka lawang, nguripake maneh kanggo mbukak lawang, banjur mlebu alon-alon.
Riwayat revisi
| Tanggal | Versi | Katrangan |
| 10/11/2024 | 1.0 | Versi wiwitan |
![]()
Dokumen / Sumber Daya
 |
SLAMTEC Aurora Mapping lan Solusi Lokalisasi [pdf] Manual pangguna Solusi Pemetaan lan Lokalisasi Aurora, Aurora, Solusi Pemetaan lan Lokalisasi, Solusi Lokalisasi, Solusi |