![]()
د نقشې کولو نوې دور او
د محلي کولو حل

د کارن لارښود
نور باثباته
ډیر دقیق
ډیر پیاوړی
شانګهای Slamtec Co., Ltd
اوورview
اورورا د LIDAR، لید، غیر مستقیم نیویګیشن، او د SLAMTEC لخوا رامینځته شوي ژورې زده کړې ټیکنالوژیو نوښت فیوژن دی. دا پرمختللي ځایی کول او د نقشه کولو احساس سینسرونه مدغم کوي ، د داخلي او بهر دواړو 3D لوړ دقیق نقشه کولو سیسټمونو لپاره د شپږ درجې آزادۍ ځایی کولو وړاندیز کوي ، پرته له دې چې په پیل کې بهرني انحصار ته اړتیا وي. برسیره پردې، اورورا د جامع وسیلې چین سره راځي، په شمول د ګرافیکي انٹرفیس سافټویر روبو سټوډیو او د ثانوي پراختیا لپاره د SDK اوزار کټونه، کاروونکو ته وړتیا ورکوي چې په چټکۍ سره دودیز غوښتنلیکونه رامینځته کړي او د محصول ګمارل ګړندي کړي. د محصول کلیدي ځانګړتیاوې عبارت دي له:
- د فیوژن LIDAR + دوربین لید + IMU څو سرچینې فیوژن الګوریتم ، د بهرني پراختیا ملاتړ کوي (GPS/RTK ، اوډومیټر او نور)
- د کور دننه او بهر د 3D نقشه کولو او ځایی کولو دندې چمتو کړئ
- د AI ټیکنالوژۍ ادغام د 3D لید ظرفیتونو لوړولو لپاره
- د بشپړ وسیلې چین سره ، د پیرودونکي اړخ غوښتنلیک توسیع لپاره ملاتړ
- د صنعت مخکښ سیسټم ثبات

1.1 کاري اصول او کارول
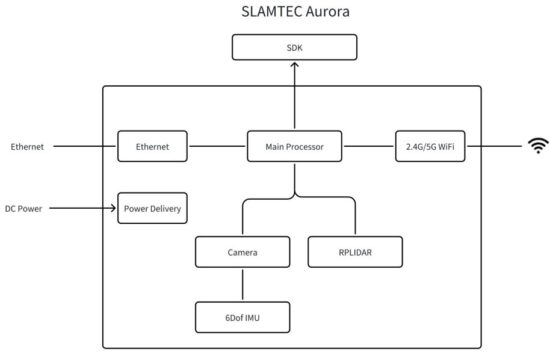
SLAMTEC اورورا د Slamtec څخه د LIDAR-vision-IMU فیوژن ځانګړی SLAM الګوریتم کاروي. د لید او لیزر ځانګړتیاو سره یوځای کول، دا کولی شي د نقشې ډیټا فیوژن په هره ثانیه کې له 10 څخه ډیر ځله ترسره کړي او تر یو ملیون مربع مترو پورې نقشه ډیټا رسم کړي. د سیسټم ډیاګرام لاندې ښودل شوی. د سیسټم محصول د ثانوي پراختیا لپاره د وسیلې چین په توګه تعریف کیدی شي ، پشمول د لید متقابل عمل اوزار Robostudio، C++ sdk، JAVA sdk، Restful API sdk، ROS sdk، او داسې نور.
بنسټیز عملیات
2.1 نصب او تفتیش
- د بریښنا رسولو تجهیزات
- د انٹرفیس ماډل: DC5521
- ننوتۍ جلدtage (اوسنی): DC12V (2A)
- دا سپارښتنه کیږي چې د نورمال بریښنا رسولو لپاره د 12V-2A بریښنا اډاپټر وکاروئ
- دا سپارښتنه کیږي چې د تولید حجم سره بیټرۍ وکاروئtage د 12V او د 5000mAh څخه ډیر ظرفیت، کوم چې د 2 ساعتونو څخه ډیر د بیټرۍ ژوند سره د نورمال بریښنا رسولو پوره کولی شي
د فعالیت کلیدي عملیات
| فعالیت | تڼۍ عملیات | د وسیلې حالت |
| ولاړ | د بریښنا تڼۍ اوږده فشار ورکړئ ترڅو وسیله سټینډ بای حالت ته واچوئ | د شاخص ر lightا بهر ځي او وسیله سټینډ بای حالت ته ننوځي |
| بریښنا پیل کړه | وروسته له دې چې وسیله سټینډ بای حالت ته ننوځي ، د بریښنا حالت ته د ننوتلو لپاره لنډ فشار ورکړئ | د شاخص ر lightا له سور څخه ژیړ چمکۍ ته بدلیږي ، د وسیلې پیل کولو ته ننوځيtage |
| ځنډول | د وسیلې ځنډول شوي کاري حالت ته د ننوتلو لپاره د وقفې تڼۍ لنډ فشار ورکړئ. | د شاخص رڼا شنه روښانه کوي |
د شاخص رڼا توضیحات
| د وسیلې رڼا فلش کولو حالت | تفصیل |
| سور تل روښانه وي | بوټ کول |
| ژیړ ټوخی | بوټ بشپړ شو، وسیله د پیل کولو پړاو ته ننوځي |
| ژیړ اوږد روښانه | د سیسټم پیل بشپړ شوی، د نقشې پیل کولو ته انتظار |
| شنه تل روښانه وي | په کار کې |
| سور چمکۍ | د وسیله استثنا |
| شنه چمکۍ | د آلې د بندولو لپاره د وقفې تڼۍ فشار ورکړئ |
د صحنې ستراتیژي توضیحات
اورورا د درې صحنې بدلولو حالتونو ملاتړ کوي. کاروونکي کولی شي د لاندې توضیحاتو سره سم صحنې بدل کړي ترڅو د کارونې اغیز ډاډمن کړي. سیسټم د داخلي پالیسۍ کارولو لپاره ډیفالټ دی.
| د صحنې کټګوري | دننه | لوی_پیمانه_نور | بهر |
| د صحنې ځانګړتیاوې | د لیزر مشاهده نسبتا بډایه ده، او په چاپیریال کې ډیری ورته صحنې شتون لري، کوم چې زیانمن دي د غلطو تړلو ستونزو صحنو ته |
صحنه پراخه ده، او دا اسانه ده د لیزر مشاهدې حد څخه تجاوز. عمومي مشاهده نسبتا لږ ده، او چاپیریال د بدلون وړ دی |
خلاص، د صحنې لوی ساحه، مختلفې سیمې موافقتونه شتون لري |
| عادي سناریو | د دفتر ودانۍ، دفترونه، حکومت مرکزونه/طبي موسسې/هوټي ls، او داسې نور |
د پارکینګ لوی ځایونه، شاپنگ مالونه، د سباوون تمځایونه، د انتظار تالارونه، دولتي مرکزونه/طبي بنسټونه/د هوټلونو لابیونه چې لوی دي ساحې (رادار د مشاهدې حد څخه بهر)، او داسې نور |
عادي بهرنۍ صحنې، پارکونه، کوڅې، لانونه او داسې نور، ځینې داخلي ځایونه، لکه سرکلر سټیډیمونه او جمنازیمونه، په ټوله کې پراخه ساحه لري |
2.2 د وسیلې پیوستون او ښوونه
د چمتووالي کار
a. Robostudio ډاونلوډ کړئ، ریموټ UI
مهرباني وکړئ رسمي ته لاړ شئ webد ډاونلوډ کولو سایټ RoboStudio د توزیع وړ روبوټ مدیریت او پراختیا سافټویر | SLAMTEC ، ریموټ UI یو ګرافیکي تعامل سافټویر دی چې د SLAMTEC لخوا رامینځته شوی ، کارونکي کولی شي د Robostudio څخه کار واخلي ترڅو د اورورا سره اړیکې رامینځته کړي ، د نقشې موقعیت نظارت او اپلوډ ترتیب ترلاسه کولو لپاره. files او نورې دندې
ب. لاستی له اورورا سره وصل کړئ او د وسیله له فعالیدو وروسته یې وکاروئ
بنسټیز عملیات
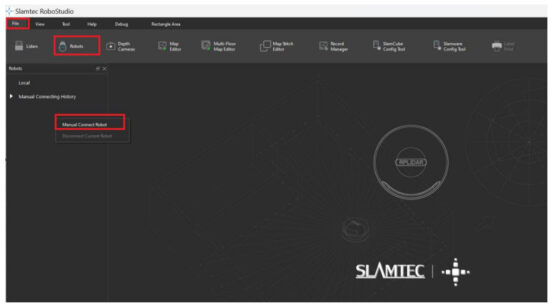
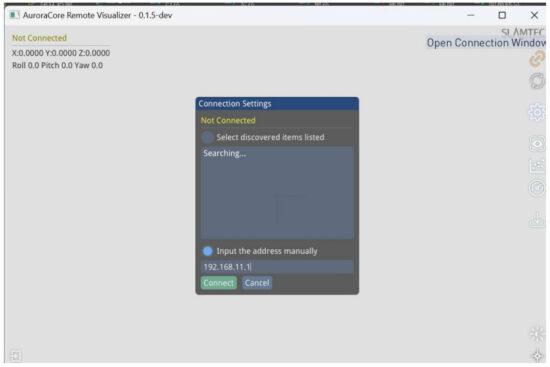
a. د روبو سټوډیو نښلولو وسیله پیل کړئ
ب. په پاپ اپ کړکۍ کې، د IP پته بار کې IP 192.168.11.1 دننه کړئ او د وسیله سره د نښلولو لپاره "د نښلولو" تڼۍ کلیک وکړئ.
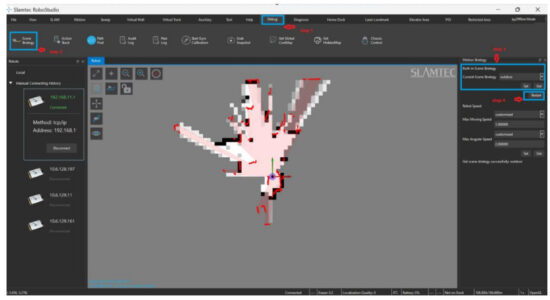
ج. د نقشه کولو پیل کولو دمخه ، د مناسبو ستراتیژیو غوره کولو لپاره د API کالونو یا روبو سټوډیو وکاروئ (د پورتنۍ سناریو توضیحاتو ته مراجعه وکړئ) ، او بیا د خدمت بیا پیل کیدو وروسته د نقشې ازموینې پیل کړئ. د RoboStudio ځانګړی ترتیب طریقه
d. د اورورا پیل کول
د نقشې پیل کولو دمخه، سیسټم راپور ورکوي چې vslam پیل کوي، او د اورورا ابتکار عملیات باید ترسره شي. د پیل کولو ځانګړي عملیات په لاندې ډول دي:
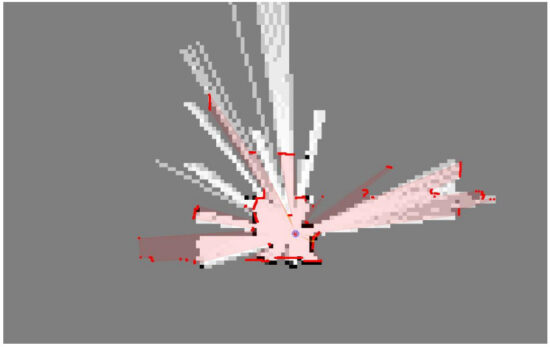
- د څرګندو ځانګړتیاو سره یوه ساحه ومومئ، مخ یې ونیسئ، اورورا په نږدې افقی حالت کې د 2-3m په فاصله کې ونیسئ، او پیل پیل کړئ.
- لاسي وسیله په ځای کې وساتئ. دې عملیاتو ته تر هغه وخته دوام ورکړئ تر څو چې د تعامل نښه د متقابل انٹرفیس څخه ورک نشي. د رسمي نقشې کولو پروسه پیل کړئ، لکه څنګه چې لاندې انځور کې ښودل شوي.
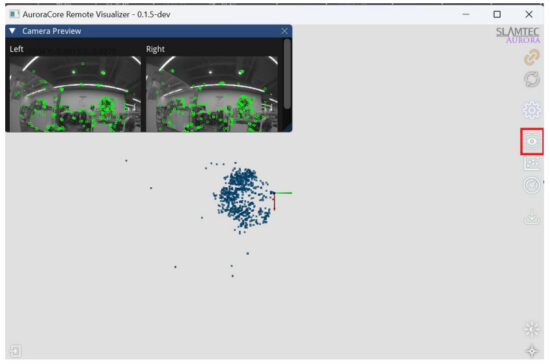
e. د aurora_remote څخه کار واخلئ view پوائنټ کلاوډ، په پاپ اپ کړکۍ کې، د IP پته بار کې IP 192.168.11.1 دننه کړئ، او بیا د وسیله سره د نښلولو لپاره "د نښلولو" تڼۍ کلیک وکړئ.
کلیک وکړئ "ټګل فریم Viewد کیمرې لخوا لیدل شوي عکسونو او فیچر ټکي ښودلو لپاره په ښي تول پټه کې
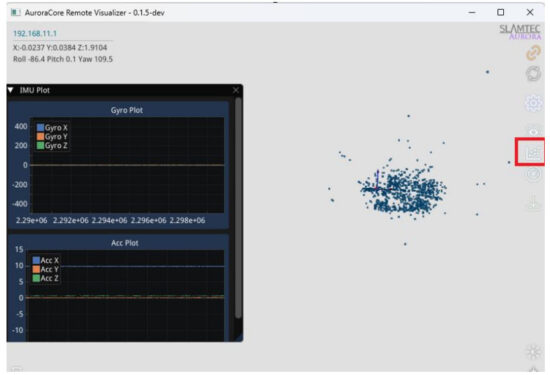
کلیک وکړئ "IMU بدل کړئ Viewد اوسني ټیسټ ماشین د ګیرو ګیروسکوپ زاویه سرعت او د اوسني ازموینې ماشین په دریو محورونو (X، Y، Z) کې د خطي سرعت د ښودلو لپاره په ښي تول پټه کې
f. د فرم ویئر اپ گریڈ
i. د اورورا وسیلې ته بریښنا ورکړئ
ii. کمپیوټر د اورورا هټ سپټ یا ایترنیټ سره وصل کړئ
iii. 192.168.11.1 براوزر ته ورشئ او لاندې پاڼه دننه کړئ
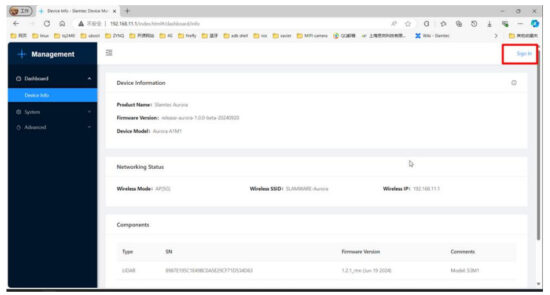
iv. د ننوتلو پاڼې ته د ننوتلو لپاره "نننننه" کلیک وکړئ
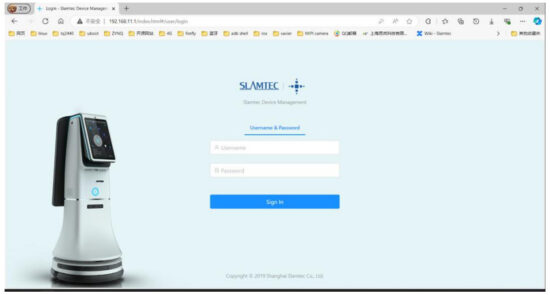
v. حساب او پټنوم دننه کړئ
vi. admin:admin111
vii. په "سیسټم" کلیک وکړئ → "فرم ویئر تازه" → "وټاکئ Fileد نوي شوي فرم ویئر غوره کولو لپاره
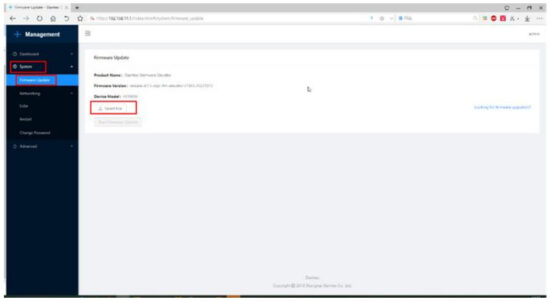
viii. د فرم ویئر اپ گریڈ پیل کولو لپاره "Start Firmware Update" کلیک وکړئ.
ix. د اپ گریڈ لاګ کې د "بریالیتوب" څرګندیدو ته انتظار وکړئ ، اپ گریډ بشپړ شو.
g. د ثانوي پراختیا لپاره SDK وکاروئ
SLAMTEC اورورا د SDK وسیلو بډایه سیټ چمتو کوي. کاروونکي کولی شي په آزاده توګه د ثانوي پراختیا لپاره مناسب SDK وسیله غوره کړي، په شمول:
- C++ SDK
- JAVA SDK
- ROS SDK
د عادي سناریو د لارې پلان کولو وړاندیزونه
د عمومي استملاک لارې اصول
➢ د سکین کولو پروسې په جریان کې د امکان تر حده ډیری مشاهدې ډاډمن کړئ
➢ هڅه وکړئ د امکان تر حده د نویو ساحو سکین کولو څخه مخنیوی وکړئ او یو ځانګړی لوپ واخلئ
➢ د امکان تر حده د متحرک شیانو د تاثیر څخه مخنیوی وکړئ
➢ د امکان تر حده ډیری تړل شوي لوپونه وګرځئ
یادونه:
- مهرباني وکړئ د بشپړ نوي نقشې جوړولو لپاره چمتو کولو دمخه د "پاک نقشه" تڼۍ کلیک وکړئ، که نه نو د نقشې اصلاح کولو انجن د اغیزمن کیدو تضمین نشي کولی
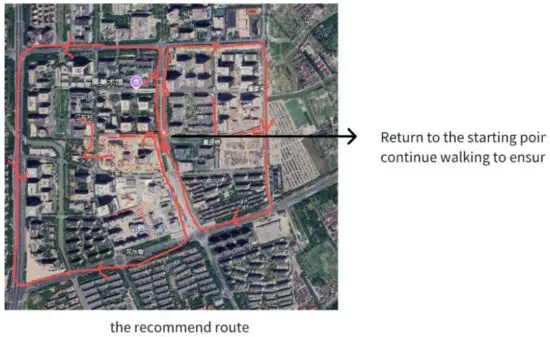
- وروسته له دې چې لوپ اصلي ځای ته راستون شي، روبوټ حرکت ته دوام ورکړئ او ډیرې پراخې لارې واخلئ. سمدلاسه حرکت مه کوئ
- د لوپ اصل ته د بیرته راستنیدو وروسته، که نقشه بنده نه وي، خپل تګ ته دوام ورکړئ تر هغه چې تړل شوی وي
- د تړلو سیمو لپاره، د زړې لارې اخیستلو څخه ډډه وکړئ او د حافظې مصرف کم کړئ
- دننه او بهر
تاسو اړتیا لرئ دننه او بهر ته لاړ شئ ترڅو ډاډ ترلاسه کړئ چې لیزر او لید مشترک لري view د ننوتلو دمخه، او ډاټا سره وصل کړئ
یو محدود ځای ته ننوتل او وتل: د محدود ځای سکین کولو وروسته، دا اړینه ده چې وګورو چې ایا د حوالې توکي کافي دي او ایا د سکینګ پروسې په جریان کې ساختماني ځانګړتیاوې څرګندې دي.
که پورتني دوه شرطونه پوره نه شي، هڅه وکړئ چې د سمون لپاره view د وتلو په وخت کې د ښه جوړښت شوي فیچر ساحې په لور، پداسې حال کې چې په لید کې د هر ډول سخت بدلون څخه ډډه کول.
یادښتونه
د کارونې بنسټیز مشخصات
➢ SLAMTEC اورورا یو دقیق تجهیزات دي. د بهرنیو ځواکونو لخوا راپرېوتل یا په نښه کېدل ممکن د تجهیزاتو د زیان لامل شي، په پایله کې د غیر معمولي کار یا ناسم دقت، یا حتی د تجهیزاتو بشپړ زیان
➢ سپارښتنه کیږي چې د وسایلو پاکولو لپاره د نرم وچ ټوکر یا پخپله چمتو شوي پاکولو جامې وکاروئ. مهرباني وکړئ د رادار او لینز برخې پاک وساتئ او په مستقیم ډول د خپلو لاسونو سره یې مه لمسئ
➢ د کارونې په وخت کې د بدن د تودوخې د ضایع کولو برخه مه پوښئ یا لمس مه کوئ. کله چې د وسیلې تودوخه د کارولو پرمهال خورا لوړه وي ، دا ممکن په غیر معمولي ډول کار وکړي
د پیل کولو مرحله پیل کړئ
➢ د تجهیزاتو د پیل پیل کولو مرحله کې، دا اړینه ده چې ډاډ ترلاسه شي چې تجهیزات باثباته او د امکان تر حده له ټکولو څخه پاک دي.
➢ د پیل کولو په جریان کې، اورورا باید هغه ساحې په نښه کړي چې ډیرې ځانګړتیاوې ولري، او فاصله باید د 2-3m په دننه کې وي، د لږو ځانګړتیاو سره د چاپیریال څخه ډډه وکړي لکه خلاص میدانونه، انعکاس چاپیریال لکه د شیشې لویې سیمې، او د ډیرو متحرک شیانو ځایونه. د کافي ابتکار ځانګړتیاو ډاډ ترلاسه کولو او د معلوماتو غوره پایلې ترلاسه کولو لپاره. د 3 ثانیو لپاره سټیشن کیدو وروسته او د سیسټم په بریالیتوب سره پیل کیدو ته انتظار کول ، د وسیلې حرکت کول پیل کړئ او کاري حالت ته ننوځئ
د تجهیزاتو کاري مرحله
➢ د بدن د ګړندي ګرځیدو یا ناڅاپه ودریدو څخه مخنیوی وکړئ، کوم چې کیدای شي تجهیزات هم د چټک او لوی انعطاف او ټکان تجربه کړي، چې دا به د نقشه کولو دقیقیت او اغیز تر یوې اندازې پورې اغیزه وکړي.
➢ کله چې سکین کول، سپارښتنه کیږي چې په نورمال سرعت سره وګرځئ. د لږو ځانګړتیاو، تنګ ځایونو، موړونو او داسې نورو شرایطو لپاره، دا سپارښتنه کیږي چې ورو ورو
➢ د چلولو په نورمال شرایطو کې، تجهیزات باید د امکان تر حده له 20 درجو څخه ډیر نه ودریږي
➢ کله چې د داخلي صحنو سکین کول چې ډیری خونې یا پوړونه پکې شامل وي، مهرباني وکړئ مخکې له مخکې د کور دننه دروازه پرانیزئ. کله چې د دروازې څخه تیریږي، ورو ورو سکین کړئ او د یوې مودې لپاره د دروازې په څنګ کې پاتې شئ ترڅو ډاډ ترلاسه کړئ چې د دروازې دواړو خواو ځانګړتیاوې په ورته وخت کې سکین کیدی شي. که د سکین کولو پرمهال دروازه خلاصه نه وي، ورو ورو دروازې ته نږدې کیدو دمخه شا وګرځئ ، وسیله له دروازې څخه لرې کړئ ، د دروازې خلاصولو لپاره خپل شا وګرځوئ ، او ورو ورو دننه شئ
د بیاکتنې تاریخ
| نیټه | نسخه | تفصیل |
| 10/11/2024 | 1.0 | لومړنۍ نسخه |
![]()
اسناد / سرچینې
 |
د SLAMTEC اورورا نقشه کولو او ځایی کولو حل [pdf] د کارونکي لارښود Aurora Mapping and Localization Solution, Aurora, Mapping and Localization Solution, Localization Solution, Solution |