![]()
Yon nouvo epòk nan kat ak
solisyon lokalizasyon

Manyèl itilizatè
Plis ki estab
Plis egzat
Plis Pwisan
Shanghai Slamtec co, Ltd
Plis paseview
Aurora se yon fizyon inovatè nan LIDAR, vizyon, navigasyon inèrsyèl, ak teknoloji aprantisaj pwofon devlope pa SLAMTEC. Li entegre lokalizasyon avanse ak detèktè pèsepsyon kat, ofri lokalizasyon sis-degre-of-libète pou tou de andedan kay la ak deyò 3D sistèm kat segondè-presizyon, ki pa gen okenn depandans ekstèn obligatwa nan demaraj. Anplis de sa, Aurora vini ak yon chèn zouti konplè, ki gen ladan lojisyèl koòdone grafik RoboStudio ak kit zouti SDK pou devlopman segondè, ki pèmèt itilizatè yo byen vit kreye aplikasyon Customized ak akselere deplwaman pwodwi. Karakteristik kle nan pwodwi a gen ladan:
- Fusion LIDAR + vizyon longim + IMU milti-sous algorithm fizyon, sipòte ekspansyon ekstèn (GPS/RTK, odomèt, elatriye)
- Bay fonksyon kat 3D andedan ak deyò ak lokalizasyon
- Entegre teknoloji AI pou amelyore kapasite pèsepsyon 3D
- Avèk yon chèn zouti konplè, sipò pou ekspansyon aplikasyon bò kliyan
- Estabilite sistèm dirijan endistri yo

1.1 Prensip travay ak itilizasyon
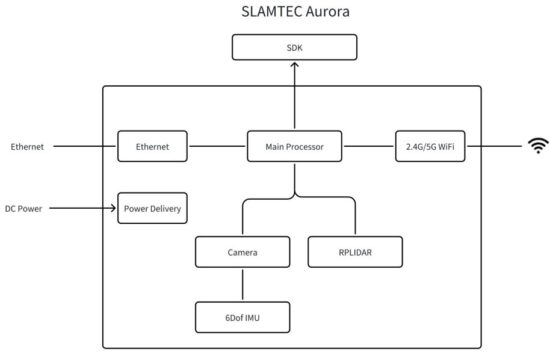
SLAMTEC Aurora itilize algorithm SLAM inik nan fizyon LIDAR-vizyon-IMU ki soti nan Slamtec. Konbine karakteristik vizyèl ak lazè, li ka fè fizyon done kat plis pase 10 fwa pa segonn epi trase jiska yon milyon mèt kare done kat. Dyagram sistèm lan montre anba a. Pwodiksyon sistèm lan ka defini kòm yon chèn zouti pou devlopman segondè, ki gen ladan zouti entèraksyon vizyèl Robostudio, C++ sdk, JAVA sdk, Restful API sdk, ROS sdk, elatriye.
Operasyon debaz
2.1 Enstalasyon ak Enspeksyon
- Ekipman ekipman pou pouvwa
- Modèl entèfas: DC5521
- Antre voltage (aktyèl): DC12V (2A)
- Li rekòmande pou itilize yon adaptè pouvwa 12V-2A pou satisfè ekipman pou pouvwa nòmal
- Li rekòmande pou itilize yon batri ak yon pwodiksyon voltage nan 12V ak yon kapasite ki pi gran pase 5000mAh, ki ka satisfè ekipman pou pouvwa nòmal la ak yon lavi batri ki gen plis pase 2 èdtan.
Fonksyon kle operasyon
| Fonksyon | Operasyon bouton | Estati aparèy la |
| Standby | Long peze bouton pouvwa a pou mete aparèy la nan mòd sibstiti | Limyè endikatè a ap etenn epi aparèy la antre nan mòd sibstiti |
| Pouvwa sou | Apre aparèy la antre nan mòd sibstiti, peze kout pou antre nan mòd pouvwa | Limyè endikatè a chanje soti nan wouj ak jòn flache, k ap antre nan inisyalizasyon aparèy latage |
| Sispann | Kout peze bouton an pran poz pou antre nan eta k ap travay kanpe nan aparèy la. | Limyè endikatè a klere vèt |
Endikatè limyè deskripsyon
| Aparèy limyè clignotant mòd | Deskripsyon |
| Wouj toujou klere | Bòt moute |
| Flicker jòn | Bòt konplè, aparèy antre nan faz inisyalizasyon |
| Jòn long klere | Inisyalizasyon sistèm fini, ap tann yo kòmanse kat |
| Green toujou klere | Nan travay |
| Wouj flache | Aparèy eksepsyon |
| Green clignotant | Peze bouton poz la pou pran yon poz aparèy la |
Deskripsyon estrateji sèn
Aurora sipòte twa mòd chanje sèn. Itilizatè yo ka chanje sèn dapre deskripsyon ki anba a pou asire efè itilizasyon an. Sistèm nan pa sèvi ak règleman andedan kay la.
| Kategori sèn | andedan kay la | Gwo_echèl_andan | deyò |
| Karakteristik sèn | Obsèvasyon lazè relativman rich, e gen anpil sèn menm jan an nan anviwònman an, ki gen tandans nan sèn pwoblèm fèmen inègza |
Sèn nan se lajè, epi li fasil depase ranje obsèvasyon lazè a. Obsèvasyon an jeneral se relativman rar, ak anviwònman an se chanjan |
Louvri, gwo zòn sèn, divès tèren adaptasyon egziste |
| Senaryo tipik | Bilding biwo, biwo, gouvènman an sant/enstitisyon medikal/otèl, elatriye |
Gwo pakin, sant komèsyal, estasyon tren, sal datant, sant gouvènman/enstitisyon medikal/lobby otèl ak gwo zòn (rada pi lwen pase ranje obsèvasyon), elatriye |
Sèn tipik deyò, pak, lari, gazon, elatriye, kèk avni andedan kay la, tankou estad sikilè ak jimnazyòm, gen yon pi gwo zòn jeneral. |
2.2 Koneksyon aparèy ak Tutorial
Travay preparasyon
a. Telechaje Robostudio, Remote UI
Tanpri ale nan ofisyèl la websit pou telechaje RoboStudio évolutive jesyon robo ak lojisyèl devlopman | SLAMTEC , Remote UI se yon lojisyèl entèraksyon grafik devlope pa SLAMTEC, itilizatè yo ka itilize Robostudio pou etabli yon koneksyon ak Aurora, pou reyalize siveyans pwezante kat ak telechaje konfigirasyon. files ak lòt fonksyon
b. Konekte manch lan ak Aurora epi sèvi ak li apre aparèy la limen
Operasyon debaz yo
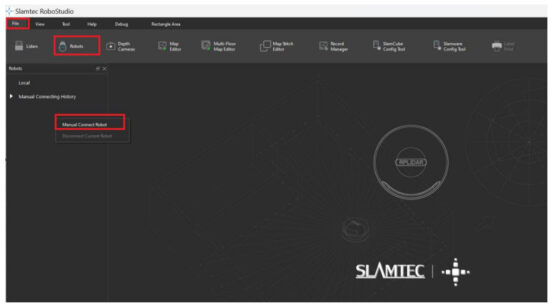
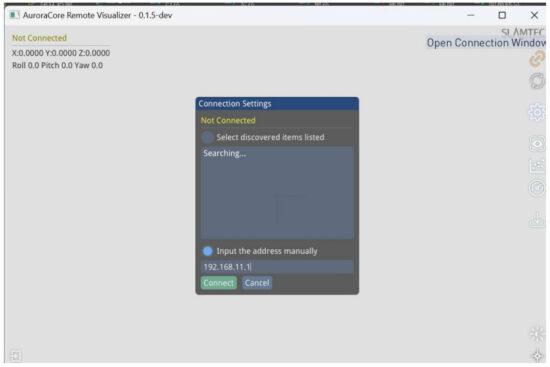
a. Kòmanse RoboStudio Connect Aparèy
b. Nan fenèt pop-up la, antre IP 192.168.11.1 nan ba adrès IP la epi klike sou bouton "Konekte" pou konekte aparèy la.
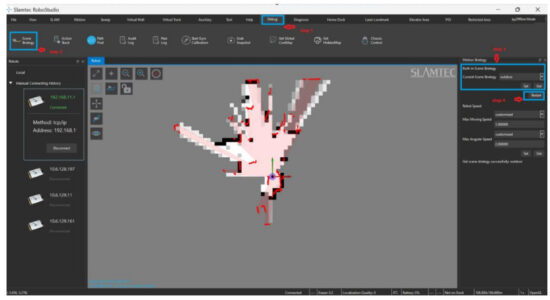
c. Anvan w kòmanse kat jeyografik, sèvi ak apèl API oswa RoboStudio pou w chwazi estrateji ki apwopriye (gade ak deskripsyon senaryo ki anwo a), epi answit kòmanse tès kat apre sèvis la rekòmanse. Metòd anviwònman espesifik RoboStudio
d. Aurora Inisyalizasyon
Anvan yo kòmanse kat la, sistèm nan rapòte ke vslam ap inisyalize, epi operasyon inisyalizasyon Aurora bezwen fèt. Operasyon espesifik inisyalizasyon an se jan sa a:
- Jwenn yon zòn ki gen karakteristik evidan, fè fas a li, kenbe Aurora nan yon eta apeprè orizontal nan yon distans 2-3m, epi kòmanse inisyalize.
- Kenbe aparèy pòtatif la estasyonè. Kontinye operasyon sa a jiskaske mak esklamasyon an disparèt nan koòdone entèaktif la. Kòmanse pwosesis kat fòmèl la, jan yo montre nan figi ki anba a.
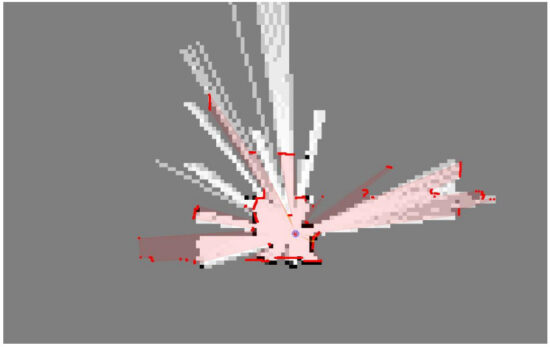
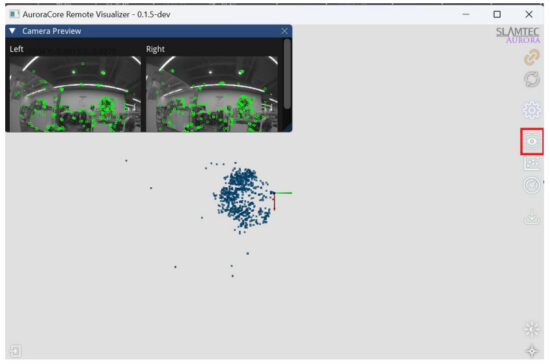
e. Sèvi ak aurora_remote pou view nwaj pwen, nan fenèt pop-up la, antre IP 192.168.11.1 nan ba adrès IP la, epi klike sou bouton "Konekte" pou konekte aparèy la.
Klike sou "Toggle Frame View” sou ba ikòn dwat la pou montre imaj yo ak pwen karakteristik kamera a obsève
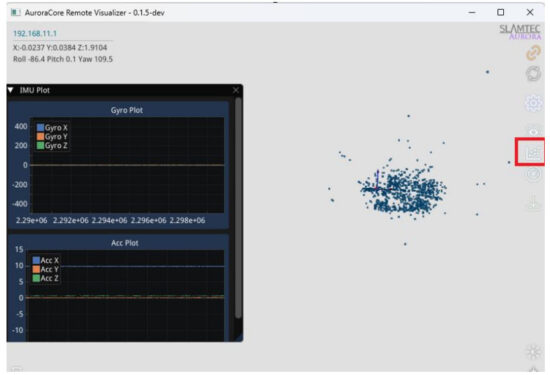
Klike sou "Toggle IMU View” sou ba zouti dwat la pou montre dinamik vitès angilè jiroskop la nan machin tès aktyèl la ak akselerasyon lineyè nan twa aks yo (X, Y, Z) nan machin tès aktyèl la.
f. Mizajou mikrolojisyèl
mwen. Pouvwa sou aparèy Aurora
ii. Konekte òdinatè a ak Aurora hotspot oswa Ethernet
iii. Vizite navigatè 192.168.11.1 epi antre nan paj sa a
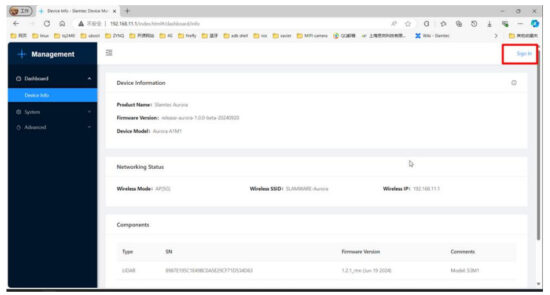
iv. Klike sou "Konekte" pou antre nan paj login la
v. Antre kont ak modpas
vi. admin:admin111
vii. Klike sou "Sistèm" → "Mizajou mikrolojisyèl" → "Chwazi File”pou chwazi firmwèr modènize a
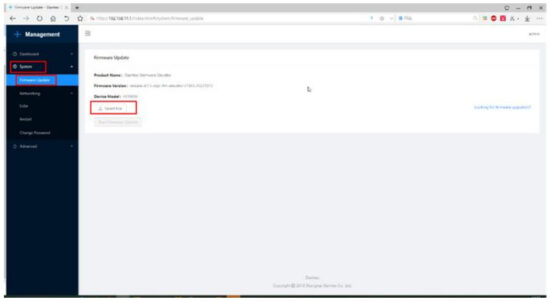
viii. Klike sou "Start Firmware Update" pou kòmanse amelyore firmwèr la.
ix. Tann pou "siksè" parèt nan jounal ajou a, ajou fini.
g. Sèvi ak SDK pou devlopman segondè
SLAMTEC Aurora bay yon seri zouti ki rich nan SDK. Itilizatè yo ka chwazi lib zouti SDK ki apwopriye pou devlopman segondè, tankou:
- C++ SDK
- JAVA SDK
- ROS SDK
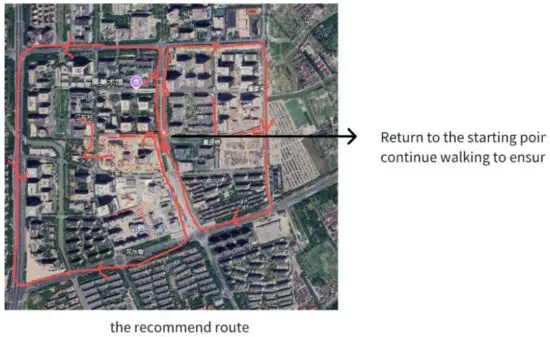
Tipik sijesyon planifikasyon wout senaryo
Prensip wout akizisyon jeneral
➢ Asire anpil obsèvasyon ke posib pandan pwosesis eskanè a
➢ Eseye evite analize nouvo zòn otank posib epi pran yon sèten bouk
➢ Evite enpak objè dinamik otank posib
➢ Mache anpil bouk fèmen ke posib
Nòt:
- Tanpri klike sou bouton "Klè kat jeyografik la" anvan ou prepare pou kreye yon newmap konplè, otreman motè optimize kat la pa ka garanti pran efè.
- Apre bouk la retounen nan orijin nan, kenbe robo a deplase epi pran plis chemen sipèpoze. Pa sispann deplase imedyatman
- Apre retounen nan orijin bouk la, si kat la pa fèmen, kontinye mache jiskaske li fèmen
- Pou zòn ki fèmen, evite pran ansyen chemen an epi redwi konsomasyon memwa
- Nan ak soti
Ou bezwen antre ak sòti sou kote pou asire ke lazè a ak vizyon gen yon komen view anvan ou antre, ak pi bon konekte done yo
Antre ak sòti nan yon espas ki fèmen: Apre w fin tcheke yon espas ki fèmen, li nesesè pou w obsève si objè referans yo ase epi si karakteristik estriktirèl yo evidan pandan pwosesis optik la.
Si de kondisyon ki anwo yo pa satisfè, eseye fè aliman an view nan direksyon pou yon zòn karakteristik byen estriktire lè w ap sòti, pandan w ap evite nenpòt chanjman radikal nan pèspektiv.
Nòt
Espesifikasyon itilizasyon debaz yo
➢ SLAMTEC Aurora se yon ekipman presizyon. Tonbe oswa frape pa fòs ekstèn ka lakòz domaj ekipman, sa ki lakòz travay nòmal oswa presizyon ki pa kòrèk, oswa menm domaj konplè nan ekipman an.
➢ Li rekòmande pou w sèvi ak yon twal mou sèk oswa yon twal netwayaj pwòp tèt ou bay pou netwaye ekipman an. Tanpri kenbe pati rada yo ak lantiy pwòp epi pa manyen yo dirèkteman ak men ou
➢ Pa kouvri oswa manyen pati nan kò a dissipation chalè pandan w ap itilize. Lè tanperati aparèy la twò wo pandan itilizasyon an, li ka travay anòmal
Kòmanse faz inisyalizasyon an
➢ Pandan faz inisyalizasyon demaraj ekipman an, li nesesè pou asire ke ekipman an estab epi li pa tranble otank posib.
➢ Pandan inisyalizasyon, Aurora ta dwe vize zòn ki gen plis karakteristik, epi distans la ta dwe nan 2-3m, evite anviwònman ki gen mwens karakteristik tankou plenn louvri, anviwònman refractive tankou gwo zòn nan glas, ak zòn ki gen plis objè dinamik, nan lòd. asire ase karakteristik inisyalizasyon ak jwenn pi bon rezilta done. Apre ou fin estasyonè pou 3 segonn epi tann pou sistèm lan inisyalize avèk siksè, kòmanse deplase aparèy la epi antre nan eta k ap travay.
Ekipman travay faz
➢ Evite wotasyon rapid nan kò a oswa arè toudenkou, ki ka lakòz ekipman an fè eksperyans tou devyasyon rapid ak gwo ak souke, ki pral afekte presizyon kat la ak efè nan yon sèten limit.
➢ Lè eskanè, li rekòmande pou mache a yon vitès nòmal. Pou sitiyasyon ki gen mwens karakteristik, espas etwat, vire, elatriye, li rekòmande pou ralanti
➢ Nan kondisyon nòmal pou mache, ekipman an pa ta dwe panche plis pase 20 ° otank posib
➢ Lè w ap tcheke sèn andedan kay la ki enplike plizyè chanm oswa etaj, tanpri louvri pòt andedan kay la davans. Lè w ap pase nan pòt la, eskane dousman epi rete sou bò pòt la pou yon peryòd de tan pou asire ke karakteristik yo sou tou de bò pòt la ka tcheke an menm tan. Si pòt la pa louvri pandan optik, vire dousman anvan ou apwoche pòt la, vire enstriman an lwen pòt la, vire do ou pou ouvri pòt la, epi antre tou dousman.
Istwa revizyon
| Dat | Version | Deskripsyon |
| 10/11/2024 | 1.0 | Premye vèsyon |
![]()
Dokiman / Resous
 |
SLAMTEC Aurora kat ak solisyon lokalizasyon [pdfManyèl Itilizatè Aurora kat ak lokalizasyon solisyon, Aurora, kat ak lokalizasyon solisyon, solisyon lokalizasyon, solisyon |