![]()
Unha nova era de cartografía e
solución de localización

Manual de usuario
Máis estable
Máis preciso
Máis poderoso
Xangai Slamtec Co., Ltd
Acabadoview
Aurora é unha fusión innovadora de tecnoloxías LIDAR, visión, navegación inercial e aprendizaxe profunda desenvolvida por SLAMTEC. Integra sensores de localización e percepción de mapeo avanzados, que ofrecen unha localización de seis graos de liberdade para sistemas de cartografía 3D de alta precisión tanto para interiores como para exteriores, sen necesidade de dependencias externas ao inicio. Ademais, Aurora inclúe unha cadea de ferramentas completa, que inclúe o software de interface gráfica RoboStudio e os kits de ferramentas SDK para o desenvolvemento secundario, o que permite aos usuarios crear rapidamente aplicacións personalizadas e acelerar a implantación do produto. As características principais do produto inclúen:
- Fusion LIDAR+ visión binocular + algoritmo de fusión multi-fuente IMU, compatible con expansión externa (GPS/RTK, odómetro, etc.)
- Proporciona funcións de localización e cartografía 3D en interiores e exteriores
- Integrando tecnoloxía de intelixencia artificial para mellorar as capacidades de percepción 3D
- Cunha cadea de ferramentas completa, soporte para a expansión de aplicacións no lado do cliente
- Estabilidade do sistema líder na industria

1.1 Principio de funcionamento e uso
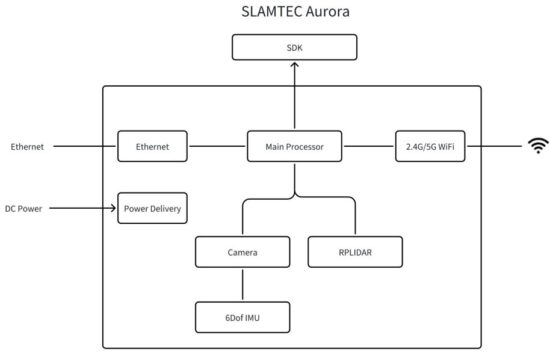
SLAMTEC Aurora utiliza o único algoritmo SLAM de fusión LIDAR-visión-IMU de Slamtec. Combinando características visuais e láser, pode realizar a fusión de datos de mapas máis de 10 veces por segundo e extraer ata un millón de metros cadrados de datos de mapas. O diagrama do sistema móstrase a continuación. A saída do sistema pódese definir como unha cadea de ferramentas para o desenvolvemento secundario, incluíndo ferramentas de interacción visual Robostudio, C++ sdk, JAVA sdk, Restful API sdk, ROS sdk, etc.
Funcionamento básico
2.1 Instalación e inspección
- Alimentación de equipos
- Modelo de interface: DC5521
- Vol. De entradatage (corrente): DC12V (2A)
- Recoméndase utilizar un adaptador de alimentación de 12 V-2 A para satisfacer a fonte de alimentación normal
- Recoméndase utilizar unha batería cun voltage de 12 V e unha capacidade superior a 5000 mAh, que pode satisfacer a fonte de alimentación normal cunha duración da batería de máis de 2 horas
Operación da tecla de función
| Función | Funcionamento do botón | Estado do dispositivo |
| Modo de espera | Mantén presionado o botón de acendido para poñer o dispositivo en modo de espera | A luz indicadora apágase e o dispositivo entra en modo de espera |
| Encender | Despois de que o dispositivo entre no modo de espera, prema brevemente para entrar no modo de enerxía | A luz indicadora cambia de vermello a amarelo parpadeando, introducindo as inicializacións do dispositivotage |
| Suspender | Prema brevemente o botón de pausa para entrar no estado de traballo en pausa do dispositivo. | O indicador luminoso parpadea en verde |
Descrición da luz indicadora
| Modo parpadeante da luz do dispositivo | Descrición |
| O vermello sempre é brillante | Arrancando |
| Parpadeo amarelo | Arranque completo, o dispositivo entra na fase de inicialización |
| Amarelo longo brillante | Finalizouse a inicialización do sistema, á espera de comezar a asignación |
| O verde sempre é brillante | No traballo |
| Vermello intermitente | Excepción do dispositivo |
| Verde intermitente | Preme o botón de pausa para pausar o dispositivo |
Descrición da estratexia da escena
Aurora admite tres modos de cambio de escena. Os usuarios poden cambiar de escena segundo a descrición a continuación para garantir o efecto de uso. O sistema utiliza por defecto a política de interiores.
| Categoría de escena | interior | Interior_a_grande_escala | ao aire libre |
| Características da escena | A observación con láser é relativamente rica, e hai moitas escenas similares no ambiente, que son propensas a escenas de problemas de peche erróneo |
A escena é ampla, e é doado exceder o rango de observación do láser. A observación xeral é relativamente escasa e o ambiente é cambiante |
Área de escena aberta, grande, terreo variado as adaptacións existen |
| Escenario típico | Edificios de oficinas, oficinas, goberno centros/institucións médicas/hoteis, etc |
Grandes aparcamentos, centros comerciais, estacións de metro, salas de espera, centros gobernamentais/institucións médicas/lobbys hoteleiros con grandes áreas (radar fóra do alcance de observación), etc |
Escenas típicas ao aire libre, parques, rúas, céspedes, etc., algúns locais interiores, como estadios circulares e ximnasios, teñen unha superficie total máis grande. |
2.2 Conexión de dispositivos e titorial
Traballo de preparación
a. Descargar Robostudio, Remote UI
Por favor, vai ao oficial websitio para descargar Software escalable de xestión e desenvolvemento de robots RoboStudio | SLAMTEC , Remote UI é un software de interacción gráfica desenvolvido por SLAMTEC, os usuarios poden usar Robostudio para establecer unha conexión con Aurora, para lograr a monitorización do posicionamento do mapeo e a configuración de carga. files e outras funcións
b. Conecte o asa a Aurora e utilízaa despois de acender o dispositivo
Operacións básicas
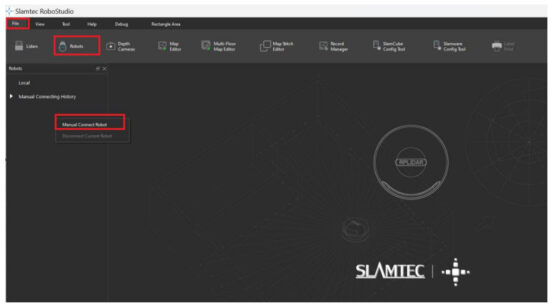
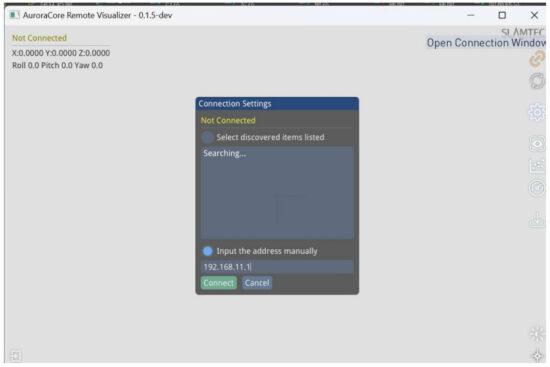
a. Inicie o dispositivo RoboStudio Connect
b. Na xanela emerxente, introduza o IP 192.168.11.1 na barra de enderezos IP e faga clic no botón "Conectar" para conectar o dispositivo.
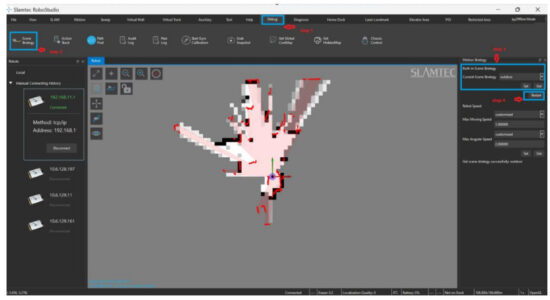
c. Antes de comezar a asignación, use as chamadas de API ou RoboStudio para seleccionar as estratexias adecuadas (consulte a descrición do escenario anterior) e, a continuación, comece a probar a asignación despois de que se reinicie o servizo. O método de configuración específico de RoboStudio
d. Inicialización Aurora
Antes de iniciar o mapeo, o sistema informa de que vslam se está a inicializar e que se debe realizar a operación de inicialización de Aurora. A operación de inicialización específica é a seguinte:
- Busca unha zona con características obvias, enfróntaa, manteña Aurora nun estado aproximadamente horizontal a unha distancia de 2-3 m e comeza a inicializar.
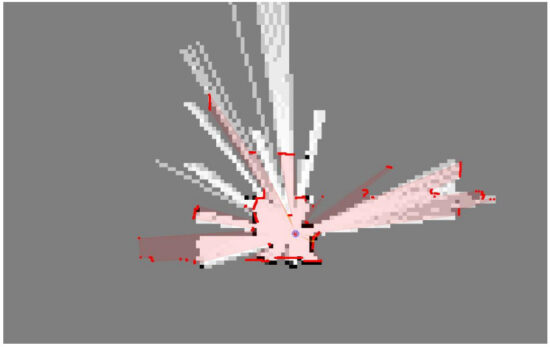
- Manteña o dispositivo portátil parado. Continúa esta operación ata que o signo de exclamación desapareza da interface interactiva. Comeza o proceso de mapeo formal, como se mostra na figura seguinte.
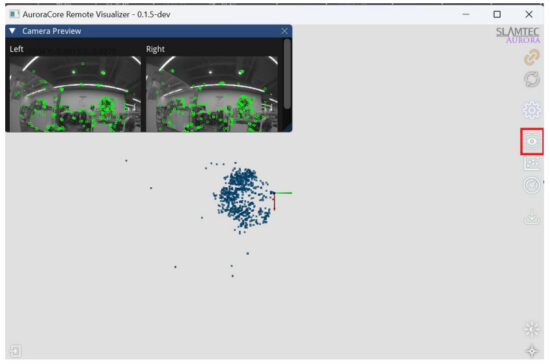
e. Usa o aurora_remote para view nube de puntos, na xanela emerxente, introduza o IP 192.168.11.1 na barra de enderezos IP e, a continuación, faga clic no botón "Conectar" para conectar o dispositivo.
Fai clic en "Alternar marco View” na barra de ferramentas dereita para mostrar as imaxes e os puntos característicos observados pola cámara
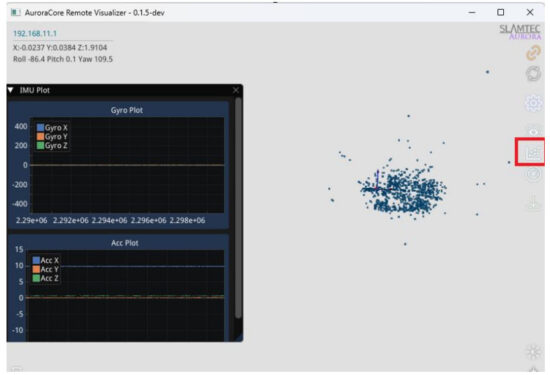
Fai clic en "Activar/desactivar IMU View” na barra de ferramentas dereita para mostrar dinámicamente a velocidade angular do xiroscopio da máquina de proba actual e a aceleración lineal nos tres eixes (X, Y, Z) da máquina de proba actual.
f. Actualización de firmware
i. Encender o dispositivo Aurora
ii. Conecte o ordenador ao punto de acceso Aurora ou Ethernet
iii. Visita o navegador 192.168.11.1 e entra na seguinte páxina
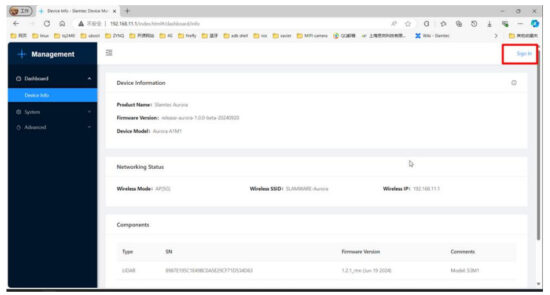
iv. Fai clic en "Iniciar sesión" para entrar na páxina de inicio de sesión
v. Introduza a conta e o contrasinal
vi. administrador: admin111
vii. Fai clic en "Sistema" → "Actualización de firmware" → "Seleccionar File” para seleccionar o firmware actualizado
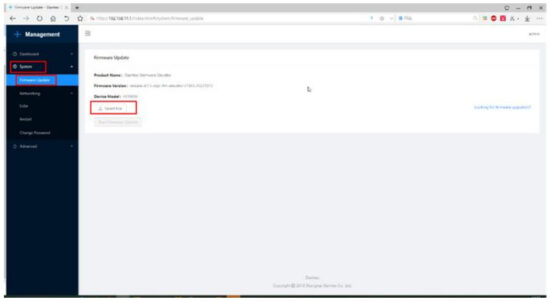
viii. Fai clic en "Iniciar actualización de firmware" para comezar a actualizar o firmware.
ix. Agarde a que apareza "éxito" no rexistro de actualizacións, a actualización completouse.
g. Usa o SDK para o desenvolvemento secundario
SLAMTEC Aurora ofrece un rico conxunto de ferramentas SDK. Os usuarios poden escoller libremente a ferramenta SDK adecuada para o desenvolvemento secundario, incluíndo:
- C++ SDK
- SDK JAVA
- SDK ROS
Suxestións de planificación de rutas de escenarios típicos
Principio global da vía de adquisición
➢ Asegurar o maior número posible de observacións durante o proceso de dixitalización
➢ Trata de evitar o máximo posible escanear novas áreas e fai un certo bucle
➢ Evitar na medida do posible o impacto de obxectos dinámicos
➢ Percorrer tantos bucles pechados como sexa posible
Notas:
- Faga clic no botón "Borrar mapa" antes de prepararse para crear un novo mapa completo; se non, non se pode garantir que o motor de optimización de cartografía teña efecto.
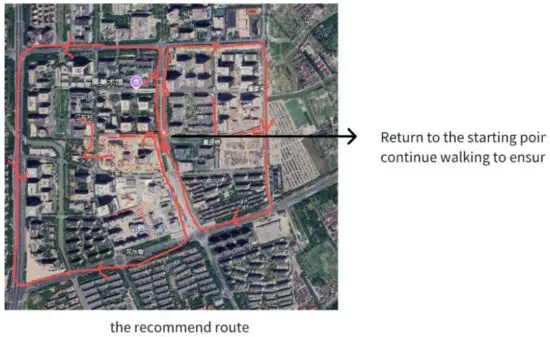
- Despois de que o bucle volva á orixe, mantén o robot en movemento e fai máis camiños superpostos. Non deixes de moverte inmediatamente
- Despois de volver á orixe do bucle, se o mapa non está pechado, continúa camiñando ata que estea pechado
- Para zonas pechadas, evita tomar o camiño antigo e reduce o consumo de memoria
- Dentro e fóra
Cómpre entrar e saír de lado para asegurarse de que o láser e a visión teñan un común view antes de entrar, e mellor conectar os datos
Entrar e saír dun espazo confinado: despois de escanear un espazo confinado, é necesario observar se os obxectos de referencia son suficientes e se as características estruturais son obvias durante o proceso de dixitalización.
Se non se cumpren as dúas condicións anteriores, intente aliñar view cara a unha zona característica ben estruturada ao saír, evitando ao mesmo tempo cambios drásticos de perspectiva.
Notas
Especificacións básicas de uso
➢ SLAMTEC Aurora é un equipo de precisión. Caer ou ser golpeado por forzas externas pode causar danos no equipo, o que provoca un traballo anormal ou unha precisión imprecisa, ou mesmo un dano total ao equipo.
➢ Recoméndase empregar un pano suave e seco ou un pano de limpeza autoproporcionado para limpar o equipo. Mantén limpos o radar e as partes da lente e non os toques directamente coas mans
➢ Non cubra nin toque a parte do corpo que disipa a calor durante o uso. Cando a temperatura do dispositivo é demasiado alta durante o uso, pode funcionar de forma anormal
Comeza a fase de inicialización
➢ Durante a fase de inicialización da posta en marcha do equipo, é necesario asegurarse de que o equipo estea estable e libre de vibracións na medida do posible.
➢ Durante a inicialización, Aurora debe apuntar a áreas con máis características e a distancia debe estar dentro de 2-3 m, evitando ambientes con menos características, como chairas abertas, ambientes refractivos como grandes áreas de vidro e áreas con obxectos máis dinámicos, para para garantir funcións de inicialización suficientes e obter mellores resultados de datos. Despois de estar parado durante 3 segundos e esperar a que o sistema se inicialice correctamente, comeza a mover o dispositivo e entra no estado de traballo.
Fase de traballo dos equipos
➢ Evite a rotación rápida do corpo ou as paradas súbitas, que poden provocar que o equipo experimente tamén unha deflexión e axitación rápida e grande, o que afectará a precisión e o efecto do mapeo ata certo punto.
➢ Ao escanear, recoméndase camiñar a unha velocidade normal. Para situacións con menos funcionalidades, espazos estreitos, xiros, etc., recoméndase reducir a velocidade
➢ En condicións normais de camiñada, o equipo non debe inclinarse máis de 20 ° o máximo posible
➢ Cando escanee escenas interiores que impliquen varias habitacións ou pisos, abra a porta interior con antelación. Ao pasar pola porta, escanea lentamente e mantéñase ao lado da porta durante un período de tempo para asegurarte de que as funcións de ambos os dous lados da porta se poidan dixitalizar ao mesmo tempo. Se a porta non está aberta durante a exploración, xira lentamente antes de achegarse á porta, afasta o instrumento da porta, dálle as costas para abrir a porta e entra lentamente.
Historial de revisións
| Data | Versión | Descrición |
| 10/11/2024 | 1.0 | Versión inicial |
![]()
Documentos/Recursos
 |
Solución de localización e mapeo SLAMTEC Aurora [pdfManual do usuario Solución de localización e cartografía de Aurora, Aurora, solución de localización e localización, solución de localización, solución |