![]()
മാപ്പിങ്ങിൻ്റെ ഒരു പുതിയ യുഗവും
പ്രാദേശികവൽക്കരണ പരിഹാരം

ഉപയോക്തൃ മാനുവൽ
കൂടുതൽ സ്ഥിരതയുള്ള
കൂടുതൽ കൃത്യത
കൂടുതൽ ശക്തിയുള്ളത്
ഷാങ്ഹായ് Slamtec Co., Ltd
കഴിഞ്ഞുview
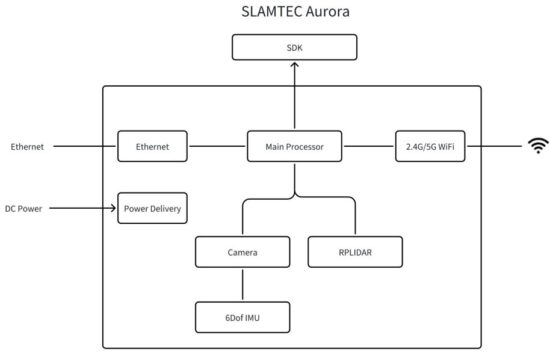
SLAMTEC വികസിപ്പിച്ച LIDAR, ദർശനം, നിഷ്ക്രിയ നാവിഗേഷൻ, ആഴത്തിലുള്ള പഠന സാങ്കേതികവിദ്യകൾ എന്നിവയുടെ നൂതനമായ സംയോജനമാണ് അറോറ. ഇത് വിപുലമായ പ്രാദേശികവൽക്കരണവും മാപ്പിംഗ് പെർസെപ്ഷൻ സെൻസറുകളും സമന്വയിപ്പിക്കുന്നു, ഇൻഡോർ, ഔട്ട്ഡോർ 3D ഹൈ-പ്രിസിഷൻ മാപ്പിംഗ് സിസ്റ്റങ്ങൾക്ക് ആറ് ഡിഗ്രി ഫ്രീഡം ലോക്കലൈസേഷൻ വാഗ്ദാനം ചെയ്യുന്നു, സ്റ്റാർട്ടപ്പിൽ ബാഹ്യ ഡിപൻഡൻസികൾ ആവശ്യമില്ല. കൂടാതെ, ദ്വിതീയ വികസനത്തിനായുള്ള ഗ്രാഫിക്കൽ ഇൻ്റർഫേസ് സോഫ്റ്റ്വെയർ റോബോസ്റ്റുഡിയോ, എസ്ഡികെ ടൂൾകിറ്റുകൾ എന്നിവയുൾപ്പെടെ സമഗ്രമായ ഒരു ടൂൾചെയിനുമായി അറോറ വരുന്നു. ഉൽപ്പന്നത്തിൻ്റെ പ്രധാന സവിശേഷതകളിൽ ഇവ ഉൾപ്പെടുന്നു:
- ഫ്യൂഷൻ LIDAR+ ബൈനോക്കുലർ വിഷൻ + IMU മൾട്ടി-സോഴ്സ് ഫ്യൂഷൻ അൽഗോരിതം, ബാഹ്യ വികാസത്തെ പിന്തുണയ്ക്കുന്നു (GPS/RTK, ഓഡോമീറ്റർ മുതലായവ)
- ഇൻഡോർ, ഔട്ട്ഡോർ 3D മാപ്പിംഗും പ്രാദേശികവൽക്കരണ പ്രവർത്തനങ്ങളും നൽകുക
- 3D പെർസെപ്ഷൻ കഴിവുകൾ വർദ്ധിപ്പിക്കുന്നതിന് AI സാങ്കേതികവിദ്യ സമന്വയിപ്പിക്കുന്നു
- ഒരു സമ്പൂർണ്ണ ടൂൾചെയിൻ ഉപയോഗിച്ച്, ക്ലയൻ്റ് സൈഡ് ആപ്ലിക്കേഷൻ വിപുലീകരണത്തിനുള്ള പിന്തുണ
- വ്യവസായ-പ്രമുഖ സിസ്റ്റം സ്ഥിരത

1.1 പ്രവർത്തന തത്വവും ഉപയോഗവും
SLAMTEC അറോറ Slamtec-ൽ നിന്നുള്ള LIDAR-vision-IMU ഫ്യൂഷൻ്റെ തനതായ SLAM അൽഗോരിതം ഉപയോഗിക്കുന്നു. വിഷ്വൽ, ലേസർ സവിശേഷതകൾ സംയോജിപ്പിച്ച്, ഇതിന് സെക്കൻഡിൽ 10 തവണയിൽ കൂടുതൽ ഡാറ്റ ഫ്യൂഷൻ നടത്താനും ഒരു ദശലക്ഷം ചതുരശ്ര മീറ്റർ വരെ മാപ്പ് ഡാറ്റ വരയ്ക്കാനും കഴിയും. സിസ്റ്റം ഡയഗ്രം താഴെ കാണിച്ചിരിക്കുന്നു. വിഷ്വൽ ഇൻ്ററാക്ഷൻ ടൂളുകൾ Robostudio, C++ sdk, JAVA sdk, Restful API sdk, ROS sdk മുതലായവ ഉൾപ്പെടെ, ദ്വിതീയ വികസനത്തിനുള്ള ടൂൾചെയിൻ ആയി സിസ്റ്റത്തിൻ്റെ ഔട്ട്പുട്ട് നിർവചിക്കാം.
അടിസ്ഥാന പ്രവർത്തനം
2.1 ഇൻസ്റ്റലേഷനും പരിശോധനയും
- ഉപകരണ വൈദ്യുതി വിതരണം
- ഇൻ്റർഫേസ് മോഡൽ: DC5521
- ഇൻപുട്ട് വോളിയംtage (നിലവിലെ): DC12V (2A)
- സാധാരണ വൈദ്യുതി വിതരണത്തിനായി 12V-2A പവർ അഡാപ്റ്റർ ഉപയോഗിക്കാൻ ശുപാർശ ചെയ്യുന്നു
- ഒരു ഔട്ട്പുട്ട് വോളിയം ഉള്ള ഒരു ബാറ്ററി ഉപയോഗിക്കാൻ ശുപാർശ ചെയ്യുന്നുtage 12V യും 5000mAh-ൽ കൂടുതൽ ശേഷിയും, 2 മണിക്കൂറിൽ കൂടുതൽ ബാറ്ററി ലൈഫ് ഉള്ള സാധാരണ പവർ സപ്ലൈയെ നേരിടാൻ കഴിയും
ഫംഗ്ഷൻ കീ പ്രവർത്തനം
| ഫംഗ്ഷൻ | ബട്ടൺ പ്രവർത്തനം | ഉപകരണ നില |
| സ്റ്റാൻഡ് ബൈ | ഉപകരണം സ്റ്റാൻഡ്ബൈ മോഡിലേക്ക് മാറ്റാൻ പവർ ബട്ടൺ ദീർഘനേരം അമർത്തുക | ഇൻഡിക്കേറ്റർ ലൈറ്റ് പുറത്തേക്ക് പോകുന്നു, ഉപകരണം സ്റ്റാൻഡ്ബൈ മോഡിൽ പ്രവേശിക്കുന്നു |
| പവർ ഓൺ ചെയ്യുക | ഉപകരണം സ്റ്റാൻഡ്ബൈ മോഡിൽ പ്രവേശിച്ച ശേഷം, പവർ മോഡിലേക്ക് പ്രവേശിക്കാൻ ഹ്രസ്വമായി അമർത്തുക | ഇൻഡിക്കേറ്റർ ലൈറ്റ് ചുവപ്പിൽ നിന്ന് മഞ്ഞ മിന്നലിലേക്ക് മാറുന്നു, ഉപകരണത്തിൻ്റെ തുടക്കത്തിലേക്ക് പ്രവേശിക്കുന്നു stage |
| സസ്പെൻഡ് ചെയ്യുക | ഉപകരണത്തിൻ്റെ താൽക്കാലികമായി നിർത്തിയ പ്രവർത്തന നിലയിലേക്ക് പ്രവേശിക്കാൻ താൽക്കാലികമായി നിർത്തുക ബട്ടൺ ചെറുതായി അമർത്തുക. | ഇൻഡിക്കേറ്റർ ലൈറ്റ് പച്ചയായി തിളങ്ങുന്നു |
ഇൻഡിക്കേറ്റർ ലൈറ്റ് വിവരണം
| ഉപകരണ ലൈറ്റ് ഫ്ലാഷിംഗ് മോഡ് | വിവരണം |
| ചുവപ്പ് എപ്പോഴും തിളക്കമുള്ളതാണ് | ബൂട്ട് ചെയ്യുന്നു |
| മഞ്ഞ ഫ്ലിക്കർ | ബൂട്ട് പൂർത്തിയായി, ഉപകരണം പ്രാരംഭ ഘട്ടത്തിലേക്ക് പ്രവേശിക്കുന്നു |
| മഞ്ഞ നീളമുള്ള തിളക്കം | സിസ്റ്റം സമാരംഭിക്കൽ പൂർത്തിയായി, മാപ്പിംഗ് ആരംഭിക്കാൻ കാത്തിരിക്കുന്നു |
| പച്ച എപ്പോഴും തെളിച്ചമുള്ളതാണ് | ജോലി |
| ചുവന്ന മിന്നൽ | ഉപകരണ ഒഴിവാക്കൽ |
| പച്ച മിന്നുന്നു | ഉപകരണം താൽക്കാലികമായി നിർത്താൻ താൽക്കാലികമായി നിർത്തുക ബട്ടൺ അമർത്തുക |
രംഗ തന്ത്ര വിവരണം
അറോറ മൂന്ന് സീൻ സ്വിച്ചിംഗ് മോഡുകളെ പിന്തുണയ്ക്കുന്നു. ഉപയോഗ പ്രഭാവം ഉറപ്പാക്കാൻ ഉപയോക്താക്കൾക്ക് ചുവടെയുള്ള വിവരണമനുസരിച്ച് സീനുകൾ മാറ്റാനാകും. ഇൻഡോർ പോളിസി ഉപയോഗിക്കുന്നതിന് സിസ്റ്റം ഡിഫോൾട്ട് ചെയ്യുന്നു.
| സീൻ വിഭാഗം | ഇൻഡോർ | വലിയ_സ്കെയിൽ_ഇൻഡോർ | ഔട്ട്ഡോർ |
| രംഗം സവിശേഷതകൾ | ലേസർ നിരീക്ഷണം താരതമ്യേന സമ്പന്നമാണ്, പരിസ്ഥിതിയിൽ സമാനമായ നിരവധി രംഗങ്ങൾ ഉണ്ട്, അവയ്ക്ക് സാധ്യതയുണ്ട് തെറ്റായ അടച്ചുപൂട്ടൽ പ്രശ്ന രംഗങ്ങളിലേക്ക് |
രംഗം വിശാലമാണ്, അത് ചെയ്യാൻ എളുപ്പമാണ് ലേസർ നിരീക്ഷണ പരിധി കവിയുക. മൊത്തത്തിലുള്ള നിരീക്ഷണം താരതമ്യേന വിരളമാണ്, പരിസ്ഥിതി മാറ്റാവുന്നതുമാണ് |
തുറന്ന, വലിയ സീൻ ഏരിയ, വിവിധ ഭൂപ്രദേശങ്ങൾ പൊരുത്തപ്പെടുത്തലുകൾ നിലവിലുണ്ട് |
| സാധാരണ രംഗം | ഓഫീസ് കെട്ടിടങ്ങൾ, ഓഫീസുകൾ, സർക്കാർ കേന്ദ്രങ്ങൾ/മെഡിക്കൽ സ്ഥാപനങ്ങൾ/ഹോട്ടലുകൾ മുതലായവ |
വലിയ പാർക്കിംഗ് സ്ഥലങ്ങൾ, ഷോപ്പിംഗ് മാളുകൾ, സബ്വേ സ്റ്റേഷനുകൾ, കാത്തിരിപ്പ് ഹാളുകൾ, സർക്കാർ കേന്ദ്രങ്ങൾ / മെഡിക്കൽ സ്ഥാപനങ്ങൾ / വലിയ ഹോട്ടൽ ലോബികൾ പ്രദേശങ്ങൾ (നിരീക്ഷണ പരിധിക്കപ്പുറമുള്ള റഡാർ) മുതലായവ |
സാധാരണ ഔട്ട്ഡോർ സീനുകൾ, പാർക്കുകൾ, തെരുവുകൾ, പുൽത്തകിടികൾ മുതലായവ, വൃത്താകൃതിയിലുള്ള സ്റ്റേഡിയങ്ങൾ, ജിംനേഷ്യങ്ങൾ എന്നിവ പോലുള്ള ചില ഇൻഡോർ വേദികൾക്ക് മൊത്തത്തിലുള്ള ഒരു വലിയ പ്രദേശമുണ്ട്. |
2.2 ഉപകരണ കണക്ഷനും ട്യൂട്ടോറിയലും
തയ്യാറെടുപ്പ് ജോലി
എ. Robostudio, റിമോട്ട് UI ഡൗൺലോഡ് ചെയ്യുക
ദയവായി ഉദ്യോഗസ്ഥന്റെ അടുത്തേക്ക് പോകുക webഡൗൺലോഡ് ചെയ്യാൻ സൈറ്റ് RoboStudio സ്കേലബിൾ റോബോട്ട് മാനേജ്മെൻ്റ് ആൻഡ് ഡെവലപ്മെൻ്റ് സോഫ്റ്റ്വെയർ | SLAMTEC , SLAMTEC വികസിപ്പിച്ച ഒരു ഗ്രാഫിക്കൽ ഇൻ്ററാക്ഷൻ സോഫ്റ്റ്വെയറാണ് റിമോട്ട് യുഐ, ഉപയോക്താക്കൾക്ക് അറോറയുമായി ഒരു ബന്ധം സ്ഥാപിക്കാനും മാപ്പിംഗ് പൊസിഷനിംഗ് മോണിറ്ററിംഗും അപ്ലോഡ് കോൺഫിഗറേഷനും നേടാനും Robostudio ഉപയോഗിക്കാം. fileകളും മറ്റ് പ്രവർത്തനങ്ങളും
ബി. ഹാൻഡിൽ അറോറയുമായി ബന്ധിപ്പിച്ച് ഉപകരണം ഓണാക്കിയ ശേഷം അത് ഉപയോഗിക്കുക
അടിസ്ഥാന പ്രവർത്തനങ്ങൾ
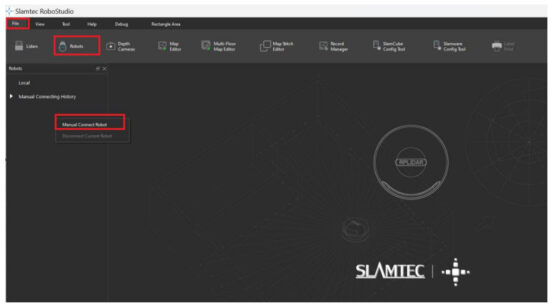
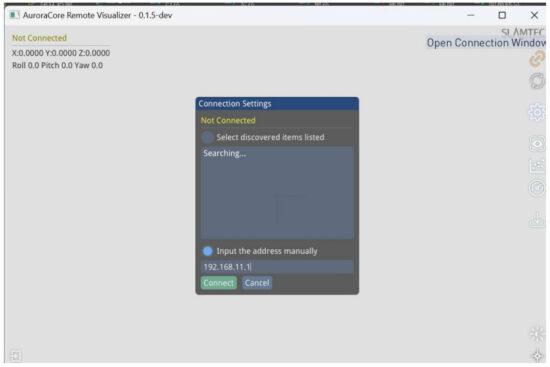
എ. RoboStudio കണക്റ്റ് ഉപകരണം ആരംഭിക്കുക
ബി. പോപ്പ്-അപ്പ് വിൻഡോയിൽ, IP വിലാസ ബാറിൽ IP 192.168.11.1 നൽകുക, ഉപകരണം ബന്ധിപ്പിക്കുന്നതിന് "കണക്റ്റ്" ബട്ടൺ ക്ലിക്കുചെയ്യുക
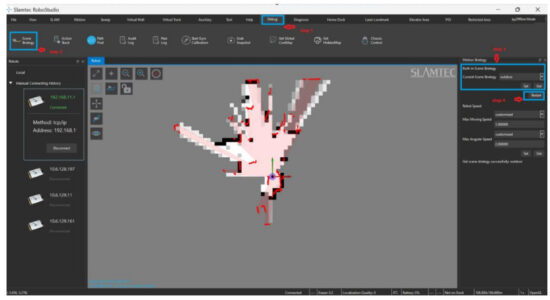
സി. മാപ്പിംഗ് ആരംഭിക്കുന്നതിന് മുമ്പ്, ഉചിതമായ തന്ത്രങ്ങൾ തിരഞ്ഞെടുക്കുന്നതിന് API കോളുകൾ അല്ലെങ്കിൽ RoboStudio ഉപയോഗിക്കുക (മുകളിലുള്ള സാഹചര്യ വിവരണം കാണുക), തുടർന്ന് സേവനം പുനരാരംഭിച്ചതിന് ശേഷം മാപ്പിംഗ് പരിശോധന ആരംഭിക്കുക. RoboStudio-യുടെ പ്രത്യേക ക്രമീകരണ രീതി
ഡി. അറോറ ഇനിഷ്യലൈസേഷൻ
മാപ്പിംഗ് ആരംഭിക്കുന്നതിന് മുമ്പ്, vslam സമാരംഭിക്കുകയാണെന്ന് സിസ്റ്റം റിപ്പോർട്ട് ചെയ്യുന്നു, അറോറ ഇനിഷ്യലൈസേഷൻ പ്രവർത്തനം നടത്തേണ്ടതുണ്ട്. നിർദ്ദിഷ്ട സമാരംഭ പ്രവർത്തനം ഇപ്രകാരമാണ്:
- വ്യക്തമായ സവിശേഷതകളുള്ള ഒരു പ്രദേശം കണ്ടെത്തുക, അതിനെ അഭിമുഖീകരിക്കുക, ഏകദേശം 2-3 മീറ്റർ അകലത്തിൽ അറോറയെ ഏകദേശം തിരശ്ചീനമായി പിടിക്കുക, തുടർന്ന് ആരംഭിക്കുക.
- ഹാൻഡ്ഹെൽഡ് ഉപകരണം നിശ്ചലമായി സൂക്ഷിക്കുക. ഇൻ്ററാക്ടീവ് ഇൻ്റർഫേസിൽ നിന്ന് ആശ്ചര്യചിഹ്നം അപ്രത്യക്ഷമാകുന്നതുവരെ ഈ പ്രവർത്തനം തുടരുക. ചുവടെയുള്ള ചിത്രത്തിൽ കാണിച്ചിരിക്കുന്നതുപോലെ, ഔപചാരിക മാപ്പിംഗ് പ്രക്രിയ ആരംഭിക്കുക.
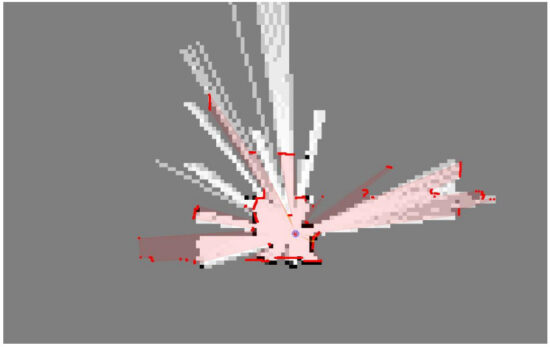
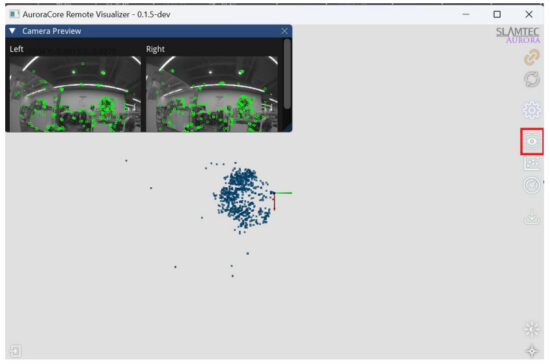
ഇ. ഇതിനായി aurora_remote ഉപയോഗിക്കുക view പോയിൻ്റ് ക്ലൗഡ്, പോപ്പ്-അപ്പ് വിൻഡോയിൽ, IP വിലാസ ബാറിൽ IP 192.168.11.1 നൽകുക, തുടർന്ന് ഉപകരണം ബന്ധിപ്പിക്കുന്നതിന് "കണക്റ്റ്" ബട്ടൺ ക്ലിക്കുചെയ്യുക
"ഫ്രെയിം മാറ്റുക" ക്ലിക്കുചെയ്യുക View” ക്യാമറ നിരീക്ഷിച്ച ചിത്രങ്ങളും ഫീച്ചർ പോയിൻ്റുകളും പ്രദർശിപ്പിക്കുന്നതിന് വലത് ടൂൾബാറിൽ
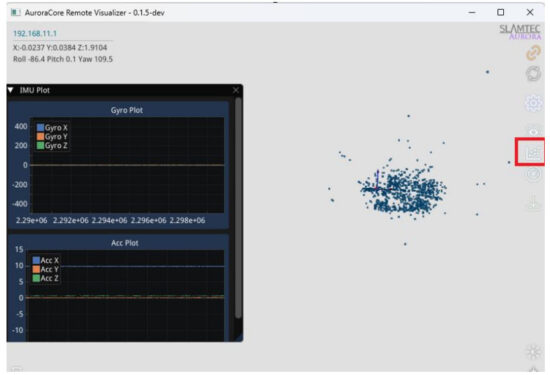
"IMU ടോഗിൾ ചെയ്യുക" ക്ലിക്ക് ചെയ്യുക View” നിലവിലെ ടെസ്റ്റ് മെഷീൻ്റെ ഗൈറോ ഗൈറോസ്കോപ്പിൻ്റെ കോണീയ പ്രവേഗവും നിലവിലെ ടെസ്റ്റ് മെഷീൻ്റെ മൂന്ന് അക്ഷങ്ങളിലെ (X, Y, Z) ലീനിയർ ആക്സിലറേഷനും ചലനാത്മകമായി പ്രദർശിപ്പിക്കുന്നതിന് വലത് ടൂൾബാറിൽ
എഫ്. ഫേംവെയർ നവീകരണം
ഐ. അറോറ ഉപകരണം ഓണാക്കുക
ii. അറോറ ഹോട്ട്സ്പോട്ടിലേക്കോ ഇഥർനെറ്റിലേക്കോ കമ്പ്യൂട്ടർ ബന്ധിപ്പിക്കുക
iii. 192.168.11.1 ബ്രൗസർ സന്ദർശിച്ച് ഇനിപ്പറയുന്ന പേജ് നൽകുക
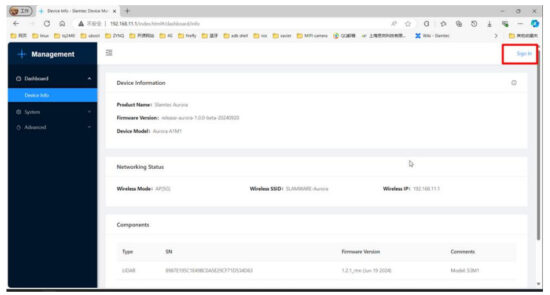
iv. ലോഗിൻ പേജ് നൽകുന്നതിന് "സൈൻ ഇൻ" ക്ലിക്ക് ചെയ്യുക
v. അക്കൗണ്ടും പാസ്വേഡും നൽകുക
vi. അഡ്മിൻ:admin111
vii. "സിസ്റ്റം" → "ഫേംവെയർ അപ്ഡേറ്റ്" → "തിരഞ്ഞെടുക്കുക" ക്ലിക്ക് ചെയ്യുക File” നവീകരിച്ച ഫേംവെയർ തിരഞ്ഞെടുക്കാൻ
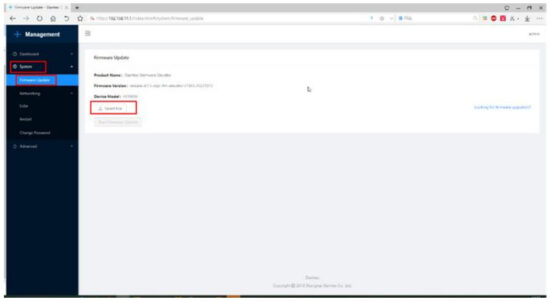
viii. ഫേംവെയർ അപ്ഗ്രേഡ് ചെയ്യാൻ ആരംഭിക്കുന്നതിന് "ഫേംവെയർ അപ്ഡേറ്റ് ആരംഭിക്കുക" ക്ലിക്കുചെയ്യുക.
ix. അപ്ഗ്രേഡ് ലോഗിൽ "വിജയം" ദൃശ്യമാകുന്നതിനായി കാത്തിരിക്കുക, നവീകരണം പൂർത്തിയായി.
ജി. ദ്വിതീയ വികസനത്തിന് SDK ഉപയോഗിക്കുക
SLAMTEC അറോറ ഒരു സമ്പന്നമായ SDK ടൂളുകൾ നൽകുന്നു. ഉപയോക്താക്കൾക്ക് ദ്വിതീയ വികസനത്തിന് അനുയോജ്യമായ SDK ടൂൾ സ്വതന്ത്രമായി തിരഞ്ഞെടുക്കാം, ഇനിപ്പറയുന്നവ ഉൾപ്പെടെ:
- C++ SDK
- ജാവ SDK
- ROS SDK
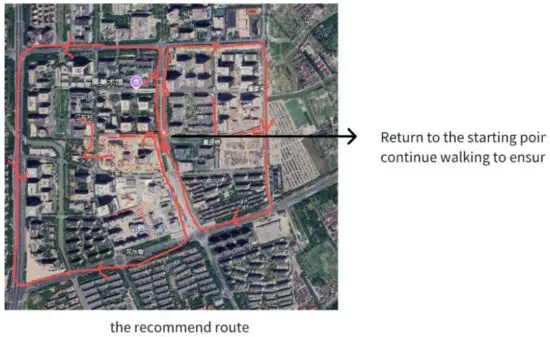
സാധാരണ സാഹചര്യ റൂട്ട് ആസൂത്രണ നിർദ്ദേശങ്ങൾ
മൊത്തത്തിലുള്ള ഏറ്റെടുക്കൽ റൂട്ട് തത്വം
➢ സ്കാനിംഗ് പ്രക്രിയയിൽ കഴിയുന്നത്ര നിരീക്ഷണങ്ങൾ ഉറപ്പാക്കുക
➢ കഴിയുന്നത്ര പുതിയ ഏരിയകൾ സ്കാൻ ചെയ്യുന്നത് ഒഴിവാക്കാനും ഒരു പ്രത്യേക ലൂപ്പ് എടുക്കാനും ശ്രമിക്കുക
➢ ചലനാത്മക വസ്തുക്കളുടെ ആഘാതം കഴിയുന്നത്ര ഒഴിവാക്കുക
➢ കഴിയുന്നത്ര ക്ലോസ്ഡ്-ലൂപ്പ് ലൂപ്പുകൾ നടത്തുക
കുറിപ്പുകൾ:
- ഒരു സമ്പൂർണ്ണ ന്യൂമാപ്പ് സൃഷ്ടിക്കുന്നതിന് മുമ്പ് ദയവായി "മാപ്പ് മായ്ക്കുക" ബട്ടൺ ക്ലിക്കുചെയ്യുക, അല്ലാത്തപക്ഷം മാപ്പിംഗ് ഒപ്റ്റിമൈസേഷൻ എഞ്ചിൻ പ്രാബല്യത്തിൽ വരുമെന്ന് ഉറപ്പ് നൽകാനാവില്ല
- ലൂപ്പ് ഉത്ഭവസ്ഥാനത്തേക്ക് മടങ്ങിയ ശേഷം, റോബോട്ടിനെ ചലിപ്പിച്ച് കൂടുതൽ ഓവർലാപ്പിംഗ് പാതകൾ സ്വീകരിക്കുക. ഉടൻ നീങ്ങുന്നത് നിർത്തരുത്
- ലൂപ്പിൻ്റെ ഉത്ഭവസ്ഥാനത്തേക്ക് മടങ്ങിയ ശേഷം, മാപ്പ് അടച്ചിട്ടില്ലെങ്കിൽ, അത് അടയ്ക്കുന്നത് വരെ നടത്തം തുടരുക
- അടച്ച പ്രദേശങ്ങളിൽ, പഴയ പാത ഒഴിവാക്കുകയും മെമ്മറി ഉപഭോഗം കുറയ്ക്കുകയും ചെയ്യുക
- അകത്തും പുറത്തും
ലേസറിനും ദർശനത്തിനും പൊതുവായുണ്ടെന്ന് ഉറപ്പാക്കാൻ നിങ്ങൾ സൈഡിലേക്ക് പ്രവേശിച്ച് പുറത്തുകടക്കേണ്ടതുണ്ട് view പ്രവേശിക്കുന്നതിന് മുമ്പ്, ഡാറ്റ നന്നായി ബന്ധിപ്പിക്കുക
ഒരു പരിമിതമായ സ്ഥലത്ത് പ്രവേശിക്കുകയും പുറത്തുകടക്കുകയും ചെയ്യുന്നു: ഒരു പരിമിതമായ ഇടം സ്കാൻ ചെയ്ത ശേഷം, റഫറൻസ് ഒബ്ജക്റ്റുകൾ മതിയായതാണോ എന്നും സ്കാനിംഗ് പ്രക്രിയയിൽ ഘടനാപരമായ സവിശേഷതകൾ വ്യക്തമാണോ എന്നും നിരീക്ഷിക്കേണ്ടത് ആവശ്യമാണ്.
മുകളിലുള്ള രണ്ട് വ്യവസ്ഥകൾ പാലിച്ചില്ലെങ്കിൽ, വിന്യസിക്കാൻ ശ്രമിക്കുക view പുറത്തുകടക്കുമ്പോൾ നല്ല ഘടനാപരമായ ഒരു ഫീച്ചർ ഏരിയയിലേക്ക്, വീക്ഷണത്തിലെ ഗുരുതരമായ മാറ്റങ്ങൾ ഒഴിവാക്കുക.
കുറിപ്പുകൾ
അടിസ്ഥാന ഉപയോഗ സവിശേഷതകൾ
➢ SLAMTEC അറോറ ഒരു കൃത്യമായ ഉപകരണമാണ്. ബാഹ്യശക്തികളാൽ വീഴുകയോ അടിക്കുകയോ ചെയ്യുന്നത് ഉപകരണങ്ങളുടെ കേടുപാടുകൾക്ക് കാരണമായേക്കാം, അതിൻ്റെ ഫലമായി അസാധാരണമായ ജോലി അല്ലെങ്കിൽ കൃത്യതയില്ലാത്ത കൃത്യത, അല്ലെങ്കിൽ ഉപകരണങ്ങൾക്ക് പൂർണ്ണമായ കേടുപാടുകൾ സംഭവിക്കാം.
➢ ഉപകരണങ്ങൾ വൃത്തിയാക്കാൻ മൃദുവായ ഉണങ്ങിയ തുണി അല്ലെങ്കിൽ സ്വയം നൽകിയ ക്ലീനിംഗ് തുണി ഉപയോഗിക്കാൻ ശുപാർശ ചെയ്യുന്നു. റഡാറും ലെൻസ് ഭാഗങ്ങളും വൃത്തിയായി സൂക്ഷിക്കുക, കൈകൊണ്ട് നേരിട്ട് തൊടരുത്
➢ ഉപയോഗിക്കുമ്പോൾ ശരീരത്തിൻ്റെ ചൂട് വ്യാപിക്കുന്ന ഭാഗം മൂടുകയോ തൊടുകയോ ചെയ്യരുത്. ഉപയോഗ സമയത്ത് ഉപകരണത്തിൻ്റെ താപനില വളരെ ഉയർന്നതാണെങ്കിൽ, അത് അസാധാരണമായി പ്രവർത്തിച്ചേക്കാം
പ്രാരംഭ ഘട്ടം ആരംഭിക്കുക
➢ ഉപകരണ സ്റ്റാർട്ടപ്പിൻ്റെ പ്രാരംഭ ഘട്ടത്തിൽ, ഉപകരണങ്ങൾ സുസ്ഥിരമാണെന്നും കഴിയുന്നത്ര കുലുക്കമില്ലെന്നും ഉറപ്പാക്കേണ്ടത് ആവശ്യമാണ്.
➢ പ്രാരംഭ സമയത്ത്, അറോറ കൂടുതൽ സവിശേഷതകളുള്ള പ്രദേശങ്ങൾ ലക്ഷ്യം വയ്ക്കണം, കൂടാതെ ദൂരം 2-3 മീറ്ററിനുള്ളിൽ ആയിരിക്കണം, തുറന്ന സമതലങ്ങൾ, വലിയ ഗ്ലാസ് പോലുള്ള റിഫ്രാക്റ്റീവ് പരിതസ്ഥിതികൾ, കൂടുതൽ ചലനാത്മക വസ്തുക്കൾ ഉള്ള പ്രദേശങ്ങൾ എന്നിവ ഒഴിവാക്കണം. മതിയായ ഇനീഷ്യലൈസേഷൻ സവിശേഷതകൾ ഉറപ്പാക്കാനും മികച്ച ഡാറ്റ ഫലങ്ങൾ നേടാനും. 3 സെക്കൻഡ് നിശ്ചലമായിരിക്കുകയും സിസ്റ്റം വിജയകരമായി ആരംഭിക്കുന്നതിനായി കാത്തിരിക്കുകയും ചെയ്ത ശേഷം, ഉപകരണം നീക്കാൻ ആരംഭിച്ച് പ്രവർത്തന നിലയിലേക്ക് പ്രവേശിക്കുക
ഉപകരണത്തിൻ്റെ പ്രവർത്തന ഘട്ടം
➢ ശരീരത്തിൻ്റെ ദ്രുതഗതിയിലുള്ള ഭ്രമണമോ പെട്ടെന്നുള്ള സ്റ്റോപ്പുകളോ ഒഴിവാക്കുക, ഇത് ഉപകരണങ്ങൾക്ക് വേഗമേറിയതും വലുതുമായ വ്യതിയാനവും കുലുക്കവും അനുഭവിക്കാൻ കാരണമായേക്കാം, ഇത് മാപ്പിംഗ് കൃത്യതയെയും ഫലത്തെയും ഒരു പരിധിവരെ ബാധിക്കും.
➢ സ്കാൻ ചെയ്യുമ്പോൾ, സാധാരണ നടത്ത വേഗതയിൽ നടക്കാൻ ശുപാർശ ചെയ്യുന്നു. കുറച്ച് സവിശേഷതകൾ, ഇടുങ്ങിയ ഇടങ്ങൾ, തിരിവുകൾ മുതലായവ ഉള്ള സാഹചര്യങ്ങളിൽ, വേഗത കുറയ്ക്കാൻ ശുപാർശ ചെയ്യുന്നു
➢ സാധാരണ നടപ്പാതയിൽ, ഉപകരണങ്ങൾ കഴിയുന്നത്ര 20 ഡിഗ്രിയിൽ കൂടുതൽ ചരിഞ്ഞ് നിൽക്കരുത്
➢ ഒന്നിലധികം മുറികളോ നിലകളോ ഉൾപ്പെടുന്ന ഇൻഡോർ സീനുകൾ സ്കാൻ ചെയ്യുമ്പോൾ, ദയവായി ഇൻഡോർ ഡോർ മുൻകൂട്ടി തുറക്കുക. വാതിലിലൂടെ കടന്നുപോകുമ്പോൾ, സാവധാനം സ്കാൻ ചെയ്ത് വാതിലിൻ്റെ ഇരുവശങ്ങളിലുമുള്ള ഫീച്ചറുകൾ ഒരേ സമയം സ്കാൻ ചെയ്യാൻ കഴിയുമെന്ന് ഉറപ്പുവരുത്താൻ വാതിലിൻ്റെ വശത്ത് അൽപസമയം നിൽക്കുക. സ്കാനിംഗ് സമയത്ത് വാതിൽ തുറന്നില്ലെങ്കിൽ, വാതിലിനടുത്തെത്തുന്നതിന് മുമ്പ് സാവധാനം തിരിയുക, വാതിലിൽ നിന്ന് ഉപകരണം തിരിക്കുക, വാതിൽ തുറക്കാൻ പുറകോട്ട് തിരിഞ്ഞ് പതുക്കെ പ്രവേശിക്കുക.
റിവിഷൻ ചരിത്രം
| തീയതി | പതിപ്പ് | വിവരണം |
| 10/11/2024 | 1.0 | പ്രാരംഭ പതിപ്പ് |
![]()
പ്രമാണങ്ങൾ / വിഭവങ്ങൾ
 |
SLAMTEC അറോറ മാപ്പിംഗും പ്രാദേശികവൽക്കരണ പരിഹാരവും [pdf] ഉപയോക്തൃ മാനുവൽ അറോറ മാപ്പിംഗ് ആൻഡ് ലോക്കലൈസേഷൻ സൊല്യൂഷൻ, അറോറ, മാപ്പിംഗ് ആൻഡ് ലോക്കലൈസേഷൻ സൊല്യൂഷൻ, ലോക്കലൈസേഷൻ സൊല്യൂഷൻ, സൊല്യൂഷൻ |