![]()
Nová éra mapování a
lokalizační řešení

Uživatelská příručka
Stabilnější
Přesnější
Výkonnější
Šanghaj Společnost Slamtec Co., Ltd
Nadview
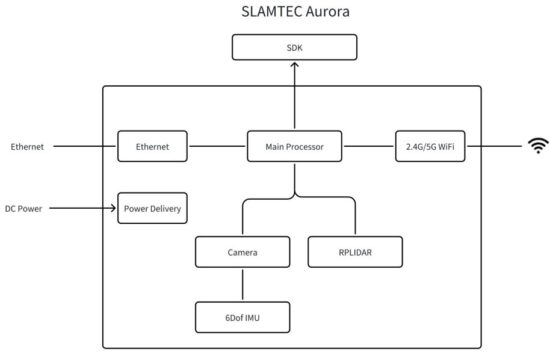
Aurora je inovativní spojení technologií LIDAR, vidění, inerciální navigace a hlubokého učení vyvinuté společností SLAMTEC. Integruje pokročilé senzory pro lokalizaci a mapování vnímání a nabízí lokalizaci šesti stupňů volnosti pro vnitřní i venkovní 3D vysoce přesné mapovací systémy bez nutnosti externích závislostí při spuštění. Navíc Aurora přichází s komplexním toolchainem, včetně grafického rozhraní softwaru RoboStudio a sad SDK pro sekundární vývoj, což uživatelům umožňuje rychle vytvářet přizpůsobené aplikace a urychlit nasazení produktu. Mezi klíčové vlastnosti produktu patří:
- Fusion LIDAR+ binokulární vidění + vícezdrojový fúzní algoritmus IMU s podporou externího rozšíření (GPS/RTK, počítadlo kilometrů atd.)
- Poskytujte vnitřní a venkovní 3D mapovací a lokalizační funkce
- Integrace technologie AI pro zlepšení schopností 3D vnímání
- S kompletním toolchainem, podporou rozšiřování aplikací na straně klienta
- Špičková stabilita systému

1.1 Pracovní princip a použití
SLAMTEC Aurora používá jedinečný algoritmus SLAM fúze LIDAR-vision-IMU od společnosti Slamtec. Díky kombinaci vizuálních a laserových charakteristik může provádět fúzi mapových dat více než 10krát za sekundu a nakreslit až jeden milion čtverečních metrů mapových dat. Schéma systému je uvedeno níže. Výstup systému lze definovat jako toolchain pro sekundární vývoj, včetně nástrojů vizuální interakce Robostudio, C++ sdk, JAVA sdk, Restful API sdk, ROS sdk atd.
Základní obsluha
2.1 Instalace a kontrola
- Napájení zařízení
- Model rozhraní: DC5521
- Vstupní objemtage (proud): DC12V (2A)
- Pro zajištění normálního napájení se doporučuje použít napájecí adaptér 12V-2A
- Doporučuje se použít baterii s výstupním objtage o 12V a kapacitě větší než 5000mAh, což může splňovat normální napájení s výdrží baterie více než 2 hodiny
Ovládání funkčními klávesami
| Funkce | Ovládání tlačítkem | Stav zařízení |
| Pohotovostní | Dlouhým stisknutím tlačítka napájení přepnete zařízení do pohotovostního režimu | Kontrolka zhasne a zařízení přejde do pohotovostního režimu |
| Zapněte napájení | Poté, co zařízení přejde do pohotovostního režimu, krátkým stisknutím přejdete do režimu napájení | Kontrolka se změní z červené na žlutou blikající, čímž vstoupíte do inicializace zařízenítage |
| Pozastavit | Krátkým stisknutím tlačítka pauza vstoupíte do pozastaveného pracovního stavu zařízení. | Kontrolka bliká zeleně |
Popis kontrolky
| Režim blikání kontrolky zařízení | Popis |
| Červená je vždy jasná | Nastartování |
| Žluté blikání | Bootování dokončeno, zařízení vstupuje do fáze inicializace |
| Žlutá dlouhá světlá | Inicializace systému dokončena, čeká se na zahájení mapování |
| Zelená je vždy jasná | V práci |
| Červená bliká | Výjimka zařízení |
| Zelené blikání | Stisknutím tlačítka pauza pozastavíte zařízení |
Popis strategie scény
Aurora podporuje tři režimy přepínání scén. Uživatelé mohou přepínat scény podle níže uvedeného popisu, aby zajistili efekt použití. Systém standardně používá vnitřní politiku.
| Kategorie scén | krytý | Large_scale_indoor | venkovní |
| Vlastnosti scény | Laserové pozorování je poměrně bohaté, a v prostředí je mnoho podobných scén, které jsou náchylné k chybnému uzavření problémových scén |
Scéna je široká a jde to snadno překročit dosah laserového pozorování. Celkové pozorování je poměrně řídké a prostředí proměnlivé |
Otevřená, velká scéna, různorodý terén adaptace existují |
| Typický scénář | Kancelářské budovy, úřady, vláda centra/lékařské ústavy/hotely atd |
Velká parkoviště, nákupní centra, stanice metra, čekárny, vládní centra/lékařské ústavy/hotelové lobby s vel oblasti (radar mimo pozorovací dosah) atd |
Typické venkovní scény, parky, ulice, trávníky atd., některá vnitřní místa, jako jsou kruhové stadiony a tělocvičny, mají větší celkovou plochu |
2.2 Připojení zařízení a výukový program
Přípravné práce
A. Stáhněte si Robostudio, vzdálené uživatelské rozhraní
Jděte prosím k úředníkovi webstránky ke stažení RoboStudio škálovatelný software pro správu a vývoj robotů | SLAMTEC , Remote UI je grafický interaktivní software vyvinutý společností SLAMTEC, uživatelé mohou používat Robostudio k navázání spojení s Aurorou, k dosažení mapování, sledování polohy a konfigurace nahrávání. files a další funkce
b. Připojte rukojeť k Auroře a použijte ji po zapnutí zařízení
Základní operace
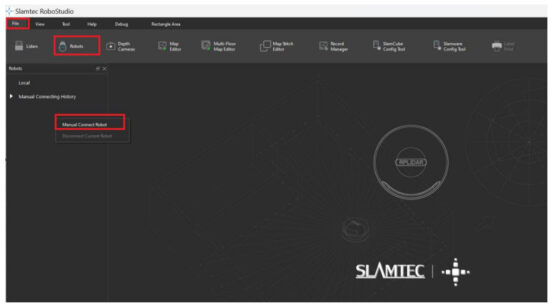
A. Spusťte RoboStudio Connect Device
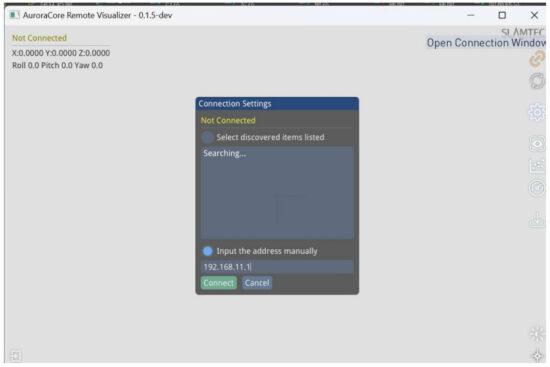
b. Ve vyskakovacím okně zadejte do řádku IP adresy IP 192.168.11.1 a kliknutím na tlačítko „Připojit“ připojte zařízení
C. Před zahájením mapování použijte volání API nebo RoboStudio k výběru vhodných strategií (viz výše uvedený popis scénáře) a poté spusťte testování mapování po restartu služby. Specifická metoda nastavení RoboStudia
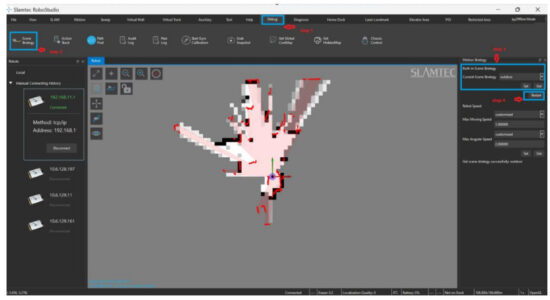
d. Inicializace Aurora
Před spuštěním mapování systém hlásí, že vslam se inicializuje a je třeba provést inicializační operaci Aurora. Konkrétní inicializační operace je následující:
- Najděte oblast se zřejmými rysy, postavte se k ní čelem, držte Auroru v přibližně vodorovném stavu ve vzdálenosti 2-3 m a začněte inicializovat.
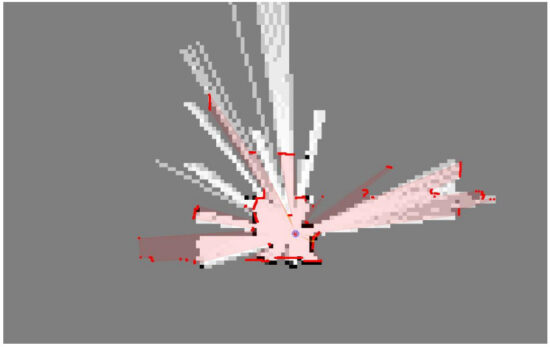
- Udržujte ruční zařízení v klidu. Pokračujte v této operaci, dokud z interaktivního rozhraní nezmizí vykřičník. Spusťte proces formálního mapování, jak je znázorněno na obrázku níže.
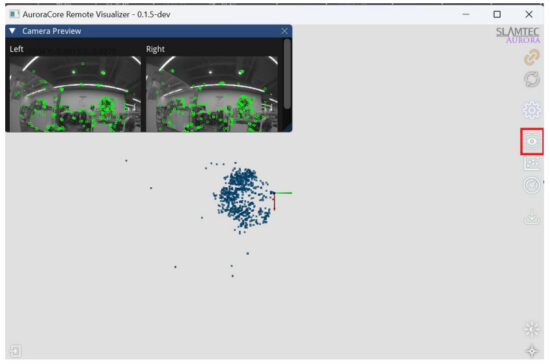
E. Použijte k tomu aurora_remote view mračno bodů, ve vyskakovacím okně zadejte do řádku IP adresy IP 192.168.11.1 a poté kliknutím na tlačítko „Připojit“ připojte zařízení
Klikněte na „Přepnout rámeček View” na pravém panelu nástrojů pro zobrazení snímků a prvků pozorovaných kamerou
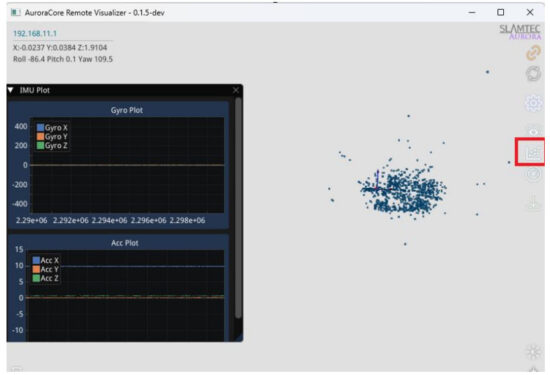
Klikněte na „Přepnout IMU View” na pravém panelu nástrojů pro dynamické zobrazení úhlové rychlosti gyroskopu aktuálního testovacího stroje a lineárního zrychlení ve třech osách (X, Y, Z) aktuálního testovacího stroje
F. Upgrade firmwaru
i. Zapněte zařízení Aurora
ii. Připojte počítač k hotspotu Aurora nebo Ethernetu
iii. Navštivte prohlížeč 192.168.11.1 a přejděte na následující stránku
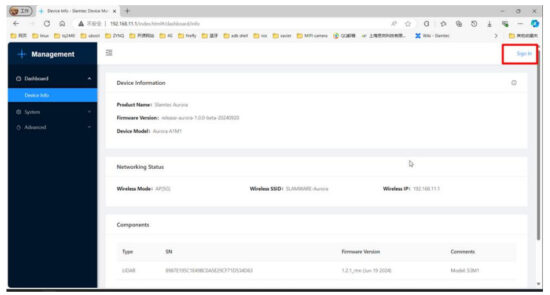
iv. Kliknutím na „Přihlásit se“ vstoupíte na přihlašovací stránku
v. Zadejte účet a heslo
vi. admin:admin111
vii. Klikněte na „Systém“ → „Aktualizace firmwaru“ → „Vybrat File” pro výběr upgradovaného firmwaru
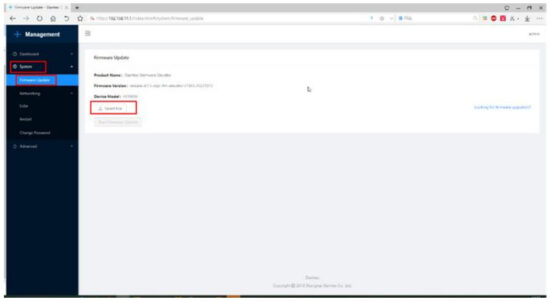
viii. Kliknutím na „Start Firmware Update“ zahájíte aktualizaci firmwaru.
ix. Počkejte, až se v protokolu upgradu objeví „úspěch“, upgrade dokončen.
G. Pro sekundární vývoj použijte SDK
SLAMTEC Aurora poskytuje bohatou sadu nástrojů SDK. Uživatelé si mohou libovolně vybrat vhodný nástroj SDK pro sekundární vývoj, včetně:
- C++ SDK
- JAVA SDK
- ROS SDK
Návrhy typického scénáře plánování trasy
Celkový princip akviziční cesty
➢ Během procesu skenování zajistěte co nejvíce pozorování
➢ Snažte se co nejvíce vyhýbat skenování nových oblastí a držte se určité smyčky
➢ Vyhněte se co nejvíce nárazům dynamických objektů
➢ Projděte co nejvíce uzavřených smyček
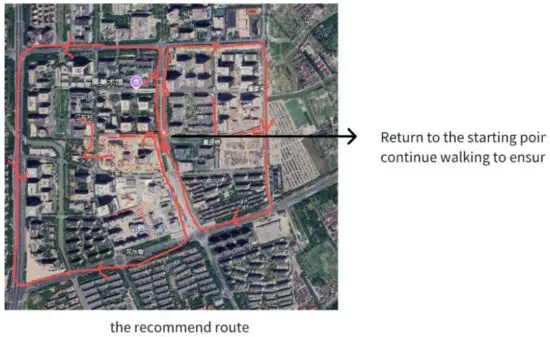
Poznámky:
- Před přípravou na vytvoření úplné nové mapy klikněte na tlačítko „Vymazat mapu“, jinak nelze zaručit, že se motor pro optimalizaci mapování projeví.
- Poté, co se smyčka vrátí do počátku, udržujte robota v pohybu a provádějte více překrývajících se cest. Nepřestávejte se okamžitě pohybovat
- Po návratu k počátku smyčky, pokud není mapa uzavřena, pokračujte v chůzi, dokud nebude uzavřena
- U uzavřených oblastí se vyhněte staré cestě a snižte spotřebu paměti
- dovnitř a ven
Musíte vstupovat a vystupovat bokem, abyste zajistili, že laser a vidění mají společné view před zadáním a lépe propojte data
Vstup a výstup z stísněného prostoru: Po naskenování stísněného prostoru je nutné sledovat, zda jsou referenční objekty dostatečné a zda jsou při skenování zřejmé konstrukční rysy.
Pokud nejsou splněny dvě výše uvedené podmínky, zkuste je zarovnat view směrem k dobře strukturované oblasti prvků při výstupu, přičemž se vyhnete jakýmkoli drastickým změnám perspektivy.
Poznámky
Základní specifikace použití
➢ SLAMTEC Aurora je přesné zařízení. Pád nebo zásah vnějšími silami může způsobit poškození zařízení, což má za následek abnormální práci nebo nepřesnou přesnost nebo dokonce úplné poškození zařízení
➢ K čištění zařízení se doporučuje používat měkký suchý hadřík nebo čistící hadřík, který je k dispozici. Díly radaru a objektivu udržujte čisté a nedotýkejte se jich přímo rukama
➢ Během používání nezakrývejte a nedotýkejte se části těla, která odvádí teplo. Když je teplota zařízení během používání příliš vysoká, může fungovat abnormálně
Spusťte inicializační fázi
➢ Během inicializační fáze spouštění zařízení je nutné zajistit, aby zařízení bylo stabilní a pokud možno bez otřesů.
➢ Během inicializace by se Aurora měla zaměřit na oblasti s více funkcemi a vzdálenost by měla být v rozmezí 2–3 m, přičemž by se měla vyvarovat prostředí s menším počtem prvků, jako jsou otevřené pláně, refrakční prostředí, jako jsou velké skleněné plochy, a oblasti s dynamičtějšími objekty, v pořadí. zajistit dostatečné inicializační funkce a získat lepší výsledky dat. Po 3 sekundách nehybnosti a čekání na úspěšnou inicializaci systému začněte pohybovat zařízením a přejděte do pracovního stavu
Fáze práce zařízení
➢ Vyhněte se rychlému otáčení těla nebo náhlým zastavením, které mohou způsobit také rychlé a velké vychýlení a otřesy zařízení, což do určité míry ovlivní přesnost a efekt mapování.
➢ Při skenování se doporučuje chodit běžnou rychlostí chůze. V situacích s menším počtem prvků, úzkých prostorů, zatáček atd. se doporučuje zpomalit
➢ Za normálních podmínek chůze by se zařízení nemělo naklánět o více než 20°, jak je to jen možné
➢ Při skenování vnitřních scén zahrnujících více místností nebo pater prosím otevřete vnitřní dveře předem. Při průchodu dveřmi skenujte pomalu a zůstaňte po určitou dobu na straně dveří, abyste zajistili, že prvky na obou stranách dveří bude možné naskenovat současně. Pokud nejsou dveře během skenování otevřené, pomalu se otočte, než se ke dveřím přiblížíte, otočte přístroj pryč od dveří, otočte se zády, abyste dveře otevřeli, a pomalu vstupte
Historie revizí
| Datum | Verze | Popis |
| 10. 11. 2024 | 1.0 | Počáteční verze |
![]()
Dokumenty / zdroje
 |
Řešení mapování a lokalizace SLAMTEC Aurora [pdfUživatelská příručka Aurora mapovací a lokalizační řešení, Aurora, mapovací a lokalizační řešení, lokalizační řešení, řešení |