![]()
ਮੈਪਿੰਗ ਦਾ ਨਵਾਂ ਯੁੱਗ ਅਤੇ
ਸਥਾਨੀਕਰਨ ਹੱਲ

ਯੂਜ਼ਰ ਮੈਨੂਅਲ
ਹੋਰ ਸਥਿਰ
ਵਧੇਰੇ ਸਟੀਕ
ਵਧੇਰੇ ਸ਼ਕਤੀਸ਼ਾਲੀ
ਸ਼ੰਘਾਈ ਸਲੈਮਟੈਕ ਕੰ., ਲਿਮਿਟੇਡ
ਵੱਧview
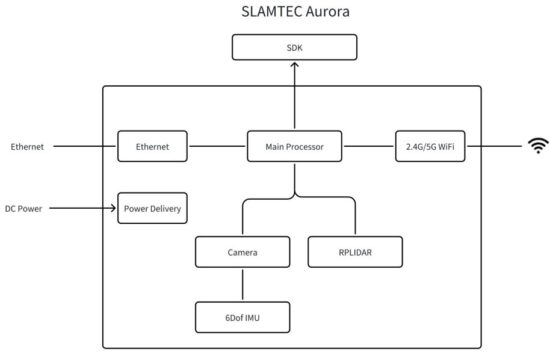
Aurora SLAMTEC ਦੁਆਰਾ ਵਿਕਸਤ LIDAR, ਵਿਜ਼ਨ, ਇਨਰਸ਼ੀਅਲ ਨੈਵੀਗੇਸ਼ਨ, ਅਤੇ ਡੂੰਘੀ ਸਿਖਲਾਈ ਤਕਨਾਲੋਜੀ ਦਾ ਇੱਕ ਨਵੀਨਤਾਕਾਰੀ ਫਿਊਜ਼ਨ ਹੈ। ਇਹ ਉੱਨਤ ਸਥਾਨਕਕਰਨ ਅਤੇ ਮੈਪਿੰਗ ਧਾਰਨਾ ਸੈਂਸਰਾਂ ਨੂੰ ਏਕੀਕ੍ਰਿਤ ਕਰਦਾ ਹੈ, ਅੰਦਰੂਨੀ ਅਤੇ ਬਾਹਰੀ 3D ਉੱਚ-ਸ਼ੁੱਧਤਾ ਮੈਪਿੰਗ ਪ੍ਰਣਾਲੀਆਂ ਲਈ ਛੇ-ਡਿਗਰੀ-ਆਫ-ਫ੍ਰੀਡਮ ਲੋਕਾਲਾਈਜ਼ੇਸ਼ਨ ਦੀ ਪੇਸ਼ਕਸ਼ ਕਰਦਾ ਹੈ, ਸ਼ੁਰੂਆਤੀ ਸਮੇਂ ਕੋਈ ਬਾਹਰੀ ਨਿਰਭਰਤਾ ਦੀ ਲੋੜ ਨਹੀਂ ਹੁੰਦੀ ਹੈ। ਇਸ ਤੋਂ ਇਲਾਵਾ, ਔਰੋਰਾ ਇੱਕ ਵਿਆਪਕ ਟੂਲਚੇਨ ਦੇ ਨਾਲ ਆਉਂਦਾ ਹੈ, ਜਿਸ ਵਿੱਚ ਸੈਕੰਡਰੀ ਡਿਵੈਲਪਮੈਂਟ ਲਈ ਗ੍ਰਾਫਿਕਲ ਇੰਟਰਫੇਸ ਸੌਫਟਵੇਅਰ ਰੋਬੋਸਟੂਡੀਓ ਅਤੇ SDK ਟੂਲਕਿੱਟ ਸ਼ਾਮਲ ਹਨ, ਉਪਭੋਗਤਾਵਾਂ ਨੂੰ ਤੁਰੰਤ ਅਨੁਕੂਲਿਤ ਐਪਲੀਕੇਸ਼ਨਾਂ ਬਣਾਉਣ ਅਤੇ ਉਤਪਾਦ ਤੈਨਾਤੀ ਨੂੰ ਤੇਜ਼ ਕਰਨ ਦੇ ਯੋਗ ਬਣਾਉਂਦੇ ਹਨ। ਉਤਪਾਦ ਦੀਆਂ ਮੁੱਖ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਵਿੱਚ ਸ਼ਾਮਲ ਹਨ:
- ਫਿਊਜ਼ਨ LIDAR + ਦੂਰਬੀਨ ਵਿਜ਼ਨ + IMU ਮਲਟੀ-ਸਰੋਤ ਫਿਊਜ਼ਨ ਐਲਗੋਰਿਦਮ, ਬਾਹਰੀ ਵਿਸਥਾਰ (GPS/RTK, ਓਡੋਮੀਟਰ, ਆਦਿ) ਦਾ ਸਮਰਥਨ ਕਰਦਾ ਹੈ।
- ਅੰਦਰੂਨੀ ਅਤੇ ਬਾਹਰੀ 3D ਮੈਪਿੰਗ ਅਤੇ ਸਥਾਨੀਕਰਨ ਫੰਕਸ਼ਨ ਪ੍ਰਦਾਨ ਕਰੋ
- 3D ਧਾਰਨਾ ਸਮਰੱਥਾਵਾਂ ਨੂੰ ਵਧਾਉਣ ਲਈ AI ਤਕਨਾਲੋਜੀ ਨੂੰ ਏਕੀਕ੍ਰਿਤ ਕਰਨਾ
- ਇੱਕ ਸੰਪੂਰਨ ਟੂਲਚੇਨ ਦੇ ਨਾਲ, ਕਲਾਇੰਟ-ਸਾਈਡ ਐਪਲੀਕੇਸ਼ਨ ਵਿਸਤਾਰ ਲਈ ਸਮਰਥਨ
- ਉਦਯੋਗ-ਮੋਹਰੀ ਸਿਸਟਮ ਸਥਿਰਤਾ

1.1 ਕੰਮ ਕਰਨ ਦਾ ਸਿਧਾਂਤ ਅਤੇ ਵਰਤੋਂ
SLAMTEC Aurora Slamtec ਤੋਂ LIDAR-vision-IMU ਫਿਊਜ਼ਨ ਦੇ ਵਿਲੱਖਣ SLAM ਐਲਗੋਰਿਦਮ ਦੀ ਵਰਤੋਂ ਕਰਦਾ ਹੈ। ਵਿਜ਼ੂਅਲ ਅਤੇ ਲੇਜ਼ਰ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਨੂੰ ਜੋੜ ਕੇ, ਇਹ ਪ੍ਰਤੀ ਸਕਿੰਟ 10 ਵਾਰ ਤੋਂ ਵੱਧ ਮੈਪ ਡੇਟਾ ਫਿਊਜ਼ਨ ਕਰ ਸਕਦਾ ਹੈ ਅਤੇ XNUMX ਲੱਖ ਵਰਗ ਮੀਟਰ ਤੱਕ ਦਾ ਨਕਸ਼ਾ ਡਾਟਾ ਖਿੱਚ ਸਕਦਾ ਹੈ। ਸਿਸਟਮ ਚਿੱਤਰ ਹੇਠਾਂ ਦਿਖਾਇਆ ਗਿਆ ਹੈ। ਸਿਸਟਮ ਦੇ ਆਉਟਪੁੱਟ ਨੂੰ ਸੈਕੰਡਰੀ ਵਿਕਾਸ ਲਈ ਇੱਕ ਟੂਲਚੇਨ ਵਜੋਂ ਪਰਿਭਾਸ਼ਿਤ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ, ਜਿਸ ਵਿੱਚ ਵਿਜ਼ੂਅਲ ਇੰਟਰੈਕਸ਼ਨ ਟੂਲ ਰੋਬੋਸਟੂਡੀਓ, C++ sdk, JAVA sdk, Restful API sdk, ROS sdk, ਆਦਿ ਸ਼ਾਮਲ ਹਨ।
ਬੁਨਿਆਦੀ ਕਾਰਵਾਈ
2.1 ਸਥਾਪਨਾ ਅਤੇ ਨਿਰੀਖਣ
- ਉਪਕਰਣ ਬਿਜਲੀ ਸਪਲਾਈ
- ਇੰਟਰਫੇਸ ਮਾਡਲ: DC5521
- ਇਨਪੁਟ ਵਾਲੀਅਮtage (ਮੌਜੂਦਾ): DC12V (2A)
- ਆਮ ਪਾਵਰ ਸਪਲਾਈ ਨੂੰ ਪੂਰਾ ਕਰਨ ਲਈ 12V-2A ਪਾਵਰ ਅਡੈਪਟਰ ਦੀ ਵਰਤੋਂ ਕਰਨ ਦੀ ਸਿਫਾਰਸ਼ ਕੀਤੀ ਜਾਂਦੀ ਹੈ
- ਆਉਟਪੁੱਟ ਵੋਲਯੂਮ ਵਾਲੀ ਬੈਟਰੀ ਦੀ ਵਰਤੋਂ ਕਰਨ ਦੀ ਸਿਫਾਰਸ਼ ਕੀਤੀ ਜਾਂਦੀ ਹੈtage 12V ਅਤੇ 5000mAh ਤੋਂ ਵੱਧ ਸਮਰੱਥਾ, ਜੋ 2 ਘੰਟੇ ਤੋਂ ਵੱਧ ਦੀ ਬੈਟਰੀ ਲਾਈਫ ਦੇ ਨਾਲ ਆਮ ਪਾਵਰ ਸਪਲਾਈ ਨੂੰ ਪੂਰਾ ਕਰ ਸਕਦੀ ਹੈ
ਫੰਕਸ਼ਨ ਕੁੰਜੀ ਕਾਰਵਾਈ
| ਫੰਕਸ਼ਨ | ਬਟਨ ਕਾਰਵਾਈ | ਡਿਵਾਈਸ ਸਥਿਤੀ |
| ਨਾਲ ਖਲੋਣਾ | ਡਿਵਾਈਸ ਨੂੰ ਸਟੈਂਡਬਾਏ ਮੋਡ ਵਿੱਚ ਰੱਖਣ ਲਈ ਪਾਵਰ ਬਟਨ ਨੂੰ ਦੇਰ ਤੱਕ ਦਬਾਓ | ਸੂਚਕ ਰੋਸ਼ਨੀ ਬਾਹਰ ਜਾਂਦੀ ਹੈ ਅਤੇ ਡਿਵਾਈਸ ਸਟੈਂਡਬਾਏ ਮੋਡ ਵਿੱਚ ਦਾਖਲ ਹੁੰਦੀ ਹੈ |
| ਪਾਵਰ ਚਾਲੂ | ਡਿਵਾਈਸ ਸਟੈਂਡਬਾਏ ਮੋਡ ਵਿੱਚ ਦਾਖਲ ਹੋਣ ਤੋਂ ਬਾਅਦ, ਪਾਵਰ ਮੋਡ ਵਿੱਚ ਦਾਖਲ ਹੋਣ ਲਈ ਛੋਟਾ ਦਬਾਓ | ਸੂਚਕ ਰੋਸ਼ਨੀ ਲਾਲ ਤੋਂ ਪੀਲੀ ਫਲੈਸ਼ਿੰਗ ਵਿੱਚ ਬਦਲ ਜਾਂਦੀ ਹੈ, ਡਿਵਾਈਸ ਸ਼ੁਰੂਆਤੀ s ਵਿੱਚ ਦਾਖਲ ਹੁੰਦੀ ਹੈtage |
| ਮੁਅੱਤਲ | ਡਿਵਾਈਸ ਦੀ ਰੁਕੀ ਹੋਈ ਕਾਰਜਸ਼ੀਲ ਸਥਿਤੀ ਵਿੱਚ ਦਾਖਲ ਹੋਣ ਲਈ ਵਿਰਾਮ ਬਟਨ ਨੂੰ ਛੋਟਾ ਦਬਾਓ। | ਸੂਚਕ ਰੋਸ਼ਨੀ ਹਰੀ ਚਮਕਦੀ ਹੈ |
ਸੂਚਕ ਰੋਸ਼ਨੀ ਦਾ ਵਰਣਨ
| ਡਿਵਾਈਸ ਲਾਈਟ ਫਲੈਸ਼ਿੰਗ ਮੋਡ | ਵਰਣਨ |
| ਲਾਲ ਹਮੇਸ਼ਾ ਚਮਕਦਾਰ ਹੁੰਦਾ ਹੈ | ਬੂਟ ਹੋ ਰਿਹਾ ਹੈ |
| ਪੀਲਾ ਫਲਿੱਕਰ | ਬੂਟ ਪੂਰਾ ਹੋਇਆ, ਡਿਵਾਈਸ ਸ਼ੁਰੂਆਤੀ ਪੜਾਅ ਵਿੱਚ ਦਾਖਲ ਹੁੰਦੀ ਹੈ |
| ਪੀਲੇ ਲੰਬੇ ਚਮਕਦਾਰ | ਸਿਸਟਮ ਦੀ ਸ਼ੁਰੂਆਤ ਪੂਰੀ ਹੋਈ, ਮੈਪਿੰਗ ਸ਼ੁਰੂ ਕਰਨ ਦੀ ਉਡੀਕ ਕੀਤੀ ਜਾ ਰਹੀ ਹੈ |
| ਹਰਾ ਹਮੇਸ਼ਾ ਚਮਕਦਾਰ ਹੁੰਦਾ ਹੈ | ਕੰਮ ਉੱਤੇ |
| ਲਾਲ ਫਲੈਸ਼ਿੰਗ | ਡਿਵਾਈਸ ਅਪਵਾਦ |
| ਹਰੇ ਫਲੈਸ਼ਿੰਗ | ਡਿਵਾਈਸ ਨੂੰ ਰੋਕਣ ਲਈ ਵਿਰਾਮ ਬਟਨ ਨੂੰ ਦਬਾਓ |
ਦ੍ਰਿਸ਼ ਰਣਨੀਤੀ ਦਾ ਵਰਣਨ
Aurora ਤਿੰਨ ਸੀਨ ਸਵਿਚਿੰਗ ਮੋਡਾਂ ਦਾ ਸਮਰਥਨ ਕਰਦਾ ਹੈ। ਵਰਤੋਂਕਾਰ ਵਰਤੋਂ ਪ੍ਰਭਾਵ ਨੂੰ ਯਕੀਨੀ ਬਣਾਉਣ ਲਈ ਹੇਠਾਂ ਦਿੱਤੇ ਵਰਣਨ ਅਨੁਸਾਰ ਦ੍ਰਿਸ਼ਾਂ ਨੂੰ ਬਦਲ ਸਕਦੇ ਹਨ। ਸਿਸਟਮ ਅੰਦਰੂਨੀ ਨੀਤੀ ਦੀ ਵਰਤੋਂ ਕਰਨ ਲਈ ਪੂਰਵ-ਨਿਰਧਾਰਤ ਹੈ।
| ਦ੍ਰਿਸ਼ ਸ਼੍ਰੇਣੀ | ਅੰਦਰ | ਵੱਡੇ_ਸਕੇਲ_ਅੰਦਰ | ਬਾਹਰੀ |
| ਦ੍ਰਿਸ਼ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ | ਲੇਜ਼ਰ ਨਿਰੀਖਣ ਮੁਕਾਬਲਤਨ ਅਮੀਰ ਹੈ, ਅਤੇ ਵਾਤਾਵਰਣ ਵਿੱਚ ਬਹੁਤ ਸਾਰੇ ਸਮਾਨ ਦ੍ਰਿਸ਼ ਹਨ, ਜੋ ਪ੍ਰਵਾਨ ਹਨ ਗਲਤ ਬੰਦ ਕਰਨ ਦੀ ਸਮੱਸਿਆ ਦੇ ਦ੍ਰਿਸ਼ਾਂ ਲਈ |
ਦ੍ਰਿਸ਼ ਚੌੜਾ ਹੈ, ਅਤੇ ਇਹ ਆਸਾਨ ਹੈ ਲੇਜ਼ਰ ਨਿਰੀਖਣ ਸੀਮਾ ਨੂੰ ਪਾਰ. ਸਮੁੱਚਾ ਨਿਰੀਖਣ ਮੁਕਾਬਲਤਨ ਘੱਟ ਹੈ, ਅਤੇ ਵਾਤਾਵਰਣ ਬਦਲਣਯੋਗ ਹੈ |
ਖੁੱਲ੍ਹਾ, ਵਿਸ਼ਾਲ ਦ੍ਰਿਸ਼ ਖੇਤਰ, ਵੱਖ-ਵੱਖ ਭੂਮੀ ਅਨੁਕੂਲਤਾ ਮੌਜੂਦ ਹਨ |
| ਆਮ ਦ੍ਰਿਸ਼ | ਦਫ਼ਤਰ ਦੀਆਂ ਇਮਾਰਤਾਂ, ਦਫ਼ਤਰਾਂ, ਸਰਕਾਰਾਂ ਕੇਂਦਰ/ਮੈਡੀਕਲ ਸੰਸਥਾਵਾਂ/ਹੋਟ ਐਲ, ਆਦਿ |
ਵੱਡੇ ਪਾਰਕਿੰਗ ਲਾਟ, ਸ਼ਾਪਿੰਗ ਮਾਲ, ਸਬਵੇਅ ਸਟੇਸ਼ਨ, ਵੇਟਿੰਗ ਹਾਲ, ਵੱਡੇ ਸਰਕਾਰੀ ਕੇਂਦਰਾਂ/ਮੈਡੀਕਲ ਸੰਸਥਾਵਾਂ/ਹੋਟਲ ਲਾਬੀਜ਼ ਖੇਤਰ (ਨਿਰੀਖਣ ਸੀਮਾ ਤੋਂ ਪਰੇ ਰਾਡਾਰ), ਆਦਿ |
ਆਮ ਬਾਹਰੀ ਦ੍ਰਿਸ਼, ਪਾਰਕਾਂ, ਗਲੀਆਂ, ਲਾਅਨ, ਆਦਿ, ਕੁਝ ਅੰਦਰੂਨੀ ਸਥਾਨਾਂ, ਜਿਵੇਂ ਕਿ ਗੋਲਾਕਾਰ ਸਟੇਡੀਅਮ ਅਤੇ ਜਿਮਨੇਜ਼ੀਅਮ, ਦਾ ਸਮੁੱਚਾ ਖੇਤਰ ਵੱਡਾ ਹੁੰਦਾ ਹੈ। |
2.2 ਡਿਵਾਈਸ ਕਨੈਕਸ਼ਨ ਅਤੇ ਟਿਊਟੋਰਿਅਲ
ਤਿਆਰੀ ਦਾ ਕੰਮ
a ਰੋਬੋਸਟੂਡੀਓ, ਰਿਮੋਟ UI ਡਾਊਨਲੋਡ ਕਰੋ
ਕਿਰਪਾ ਕਰਕੇ ਅਧਿਕਾਰੀ ਕੋਲ ਜਾਓ webਡਾਊਨਲੋਡ ਕਰਨ ਲਈ ਸਾਈਟ ਰੋਬੋਸਟੂਡੀਓ ਸਕੇਲੇਬਲ ਰੋਬੋਟ ਪ੍ਰਬੰਧਨ ਅਤੇ ਵਿਕਾਸ ਸਾਫਟਵੇਅਰ | SLAMTEC , ਰਿਮੋਟ UI SLAMTEC ਦੁਆਰਾ ਵਿਕਸਤ ਇੱਕ ਗ੍ਰਾਫਿਕਲ ਇੰਟਰਐਕਸ਼ਨ ਸੌਫਟਵੇਅਰ ਹੈ, ਉਪਭੋਗਤਾ ਔਰੋਰਾ ਨਾਲ ਇੱਕ ਕੁਨੈਕਸ਼ਨ ਸਥਾਪਤ ਕਰਨ ਲਈ, ਮੈਪਿੰਗ ਪੋਜੀਸ਼ਨਿੰਗ ਨਿਗਰਾਨੀ ਅਤੇ ਅਪਲੋਡਿੰਗ ਕੌਂਫਿਗਰੇਸ਼ਨ ਨੂੰ ਪ੍ਰਾਪਤ ਕਰਨ ਲਈ ਰੋਬੋਸਟੂਡੀਓ ਦੀ ਵਰਤੋਂ ਕਰ ਸਕਦੇ ਹਨ। files ਅਤੇ ਹੋਰ ਫੰਕਸ਼ਨ
ਬੀ. ਹੈਂਡਲ ਨੂੰ Aurora ਨਾਲ ਕਨੈਕਟ ਕਰੋ ਅਤੇ ਡਿਵਾਈਸ ਦੇ ਚਾਲੂ ਹੋਣ ਤੋਂ ਬਾਅਦ ਇਸਦੀ ਵਰਤੋਂ ਕਰੋ
ਬੁਨਿਆਦੀ ਕਾਰਵਾਈਆਂ
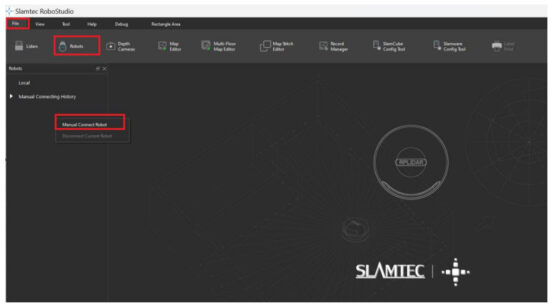
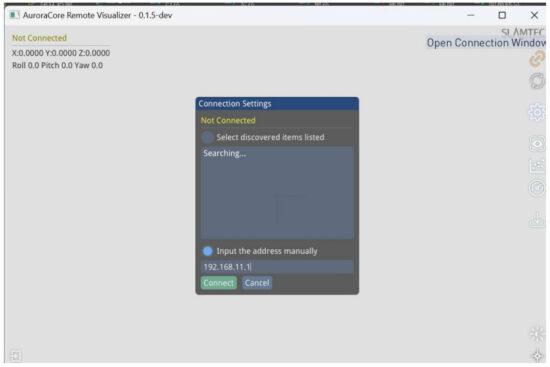
a RoboStudio ਕਨੈਕਟ ਡਿਵਾਈਸ ਸ਼ੁਰੂ ਕਰੋ
ਬੀ. ਪੌਪ-ਅੱਪ ਵਿੰਡੋ ਵਿੱਚ, IP ਐਡਰੈੱਸ ਬਾਰ ਵਿੱਚ IP 192.168.11.1 ਦਰਜ ਕਰੋ ਅਤੇ ਡਿਵਾਈਸ ਨੂੰ ਕਨੈਕਟ ਕਰਨ ਲਈ "ਕਨੈਕਟ" ਬਟਨ 'ਤੇ ਕਲਿੱਕ ਕਰੋ।
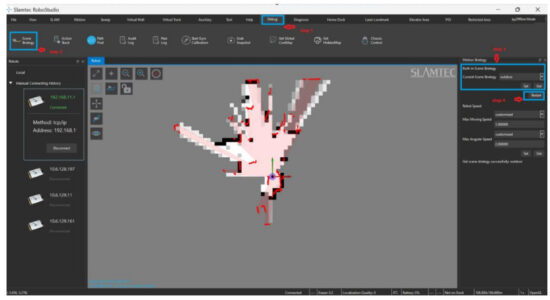
c. ਮੈਪਿੰਗ ਸ਼ੁਰੂ ਕਰਨ ਤੋਂ ਪਹਿਲਾਂ, ਉਚਿਤ ਰਣਨੀਤੀਆਂ ਦੀ ਚੋਣ ਕਰਨ ਲਈ API ਕਾਲਾਂ ਜਾਂ ਰੋਬੋਸਟੂਡੀਓ ਦੀ ਵਰਤੋਂ ਕਰੋ (ਉਪਰੋਕਤ ਦ੍ਰਿਸ਼ ਵਰਣਨ ਵੇਖੋ), ਅਤੇ ਫਿਰ ਸੇਵਾ ਦੇ ਮੁੜ ਚਾਲੂ ਹੋਣ ਤੋਂ ਬਾਅਦ ਮੈਪਿੰਗ ਟੈਸਟਿੰਗ ਸ਼ੁਰੂ ਕਰੋ। RoboStudio ਦੀ ਖਾਸ ਸੈਟਿੰਗ ਵਿਧੀ
d. ਅਰੋਰਾ ਸ਼ੁਰੂਆਤ
ਮੈਪਿੰਗ ਸ਼ੁਰੂ ਕਰਨ ਤੋਂ ਪਹਿਲਾਂ, ਸਿਸਟਮ ਰਿਪੋਰਟ ਕਰਦਾ ਹੈ ਕਿ vslam ਸ਼ੁਰੂ ਹੋ ਰਿਹਾ ਹੈ, ਅਤੇ Aurora ਸ਼ੁਰੂਆਤੀ ਕਾਰਵਾਈ ਕਰਨ ਦੀ ਲੋੜ ਹੈ। ਖਾਸ ਸ਼ੁਰੂਆਤੀ ਕਾਰਵਾਈ ਹੇਠ ਲਿਖੇ ਅਨੁਸਾਰ ਹੈ:
- ਸਪੱਸ਼ਟ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਵਾਲਾ ਇੱਕ ਖੇਤਰ ਲੱਭੋ, ਇਸਦਾ ਸਾਹਮਣਾ ਕਰੋ, ਔਰੋਰਾ ਨੂੰ 2-3 ਮੀਟਰ ਦੀ ਦੂਰੀ 'ਤੇ ਲਗਭਗ ਹਰੀਜੱਟਲ ਸਥਿਤੀ ਵਿੱਚ ਫੜੋ, ਅਤੇ ਸ਼ੁਰੂਆਤ ਕਰਨਾ ਸ਼ੁਰੂ ਕਰੋ।
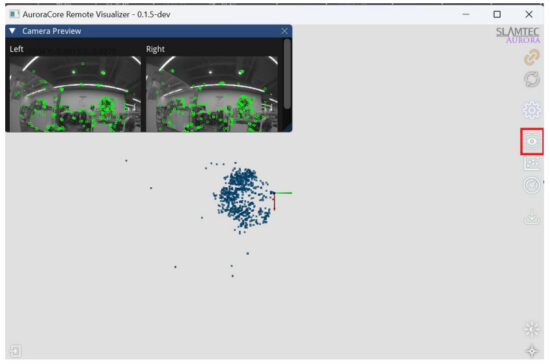
- ਹੈਂਡਹੈਲਡ ਡਿਵਾਈਸ ਨੂੰ ਸਥਿਰ ਰੱਖੋ। ਇਸ ਕਾਰਵਾਈ ਨੂੰ ਉਦੋਂ ਤੱਕ ਜਾਰੀ ਰੱਖੋ ਜਦੋਂ ਤੱਕ ਵਿਸਮਿਕ ਚਿੰਨ੍ਹ ਇੰਟਰਐਕਟਿਵ ਇੰਟਰਫੇਸ ਤੋਂ ਗਾਇਬ ਨਹੀਂ ਹੋ ਜਾਂਦਾ। ਰਸਮੀ ਮੈਪਿੰਗ ਪ੍ਰਕਿਰਿਆ ਸ਼ੁਰੂ ਕਰੋ, ਜਿਵੇਂ ਕਿ ਹੇਠਾਂ ਚਿੱਤਰ ਵਿੱਚ ਦਿਖਾਇਆ ਗਿਆ ਹੈ।
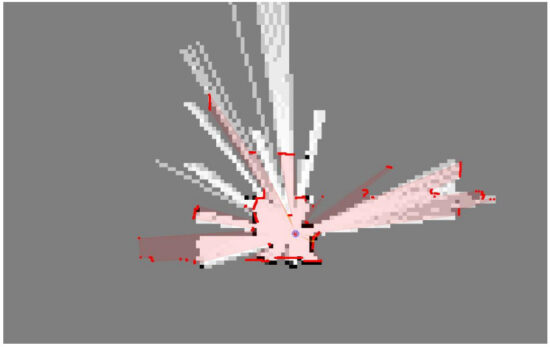
ਈ. ਲਈ aurora_remote ਦੀ ਵਰਤੋਂ ਕਰੋ view ਪੁਆਇੰਟ ਕਲਾਉਡ, ਪੌਪ-ਅੱਪ ਵਿੰਡੋ ਵਿੱਚ, IP ਐਡਰੈੱਸ ਬਾਰ ਵਿੱਚ IP 192.168.11.1 ਦਰਜ ਕਰੋ, ਅਤੇ ਫਿਰ ਡਿਵਾਈਸ ਨੂੰ ਕਨੈਕਟ ਕਰਨ ਲਈ "ਕਨੈਕਟ" ਬਟਨ 'ਤੇ ਕਲਿੱਕ ਕਰੋ।
"ਟੌਗਲ ਫਰੇਮ 'ਤੇ ਕਲਿੱਕ ਕਰੋ Viewਕੈਮਰੇ ਦੁਆਰਾ ਦੇਖੇ ਗਏ ਚਿੱਤਰਾਂ ਅਤੇ ਵਿਸ਼ੇਸ਼ਤਾ ਬਿੰਦੂਆਂ ਨੂੰ ਪ੍ਰਦਰਸ਼ਿਤ ਕਰਨ ਲਈ ਸੱਜੇ ਟੂਲਬਾਰ 'ਤੇ
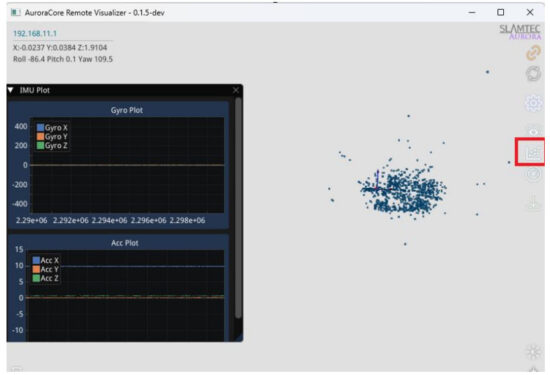
"IMU ਟੌਗਲ ਕਰੋ" 'ਤੇ ਕਲਿੱਕ ਕਰੋ Viewਮੌਜੂਦਾ ਟੈਸਟ ਮਸ਼ੀਨ ਦੇ ਗਾਇਰੋ ਜਾਇਰੋਸਕੋਪ ਦੀ ਕੋਣੀ ਵੇਗ ਅਤੇ ਮੌਜੂਦਾ ਟੈਸਟ ਮਸ਼ੀਨ ਦੇ ਤਿੰਨ ਧੁਰਿਆਂ (X, Y, Z) ਵਿੱਚ ਰੇਖਿਕ ਪ੍ਰਵੇਗ ਨੂੰ ਗਤੀਸ਼ੀਲ ਰੂਪ ਵਿੱਚ ਪ੍ਰਦਰਸ਼ਿਤ ਕਰਨ ਲਈ ਸੱਜੇ ਟੂਲਬਾਰ 'ਤੇ।
f. ਫਰਮਵੇਅਰ ਅੱਪਗਰੇਡ
i. Aurora ਡਿਵਾਈਸ 'ਤੇ ਪਾਵਰ
ii. ਕੰਪਿਊਟਰ ਨੂੰ Aurora ਹੌਟਸਪੌਟ ਜਾਂ ਈਥਰਨੈੱਟ ਨਾਲ ਕਨੈਕਟ ਕਰੋ
iii. 192.168.11.1 ਬ੍ਰਾਊਜ਼ਰ 'ਤੇ ਜਾਓ ਅਤੇ ਅਗਲੇ ਪੰਨੇ ਨੂੰ ਦਾਖਲ ਕਰੋ
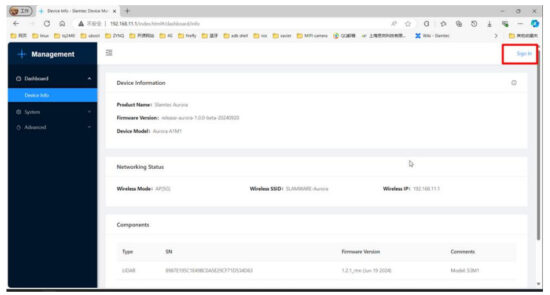
iv. ਲੌਗਇਨ ਪੰਨਾ ਦਾਖਲ ਕਰਨ ਲਈ "ਸਾਈਨ ਇਨ" 'ਤੇ ਕਲਿੱਕ ਕਰੋ
v. ਖਾਤਾ ਅਤੇ ਪਾਸਵਰਡ ਦਰਜ ਕਰੋ
vi. admin:admin111
vii. “ਸਿਸਟਮ” → “ਫਰਮਵੇਅਰ ਅੱਪਡੇਟ” → “ਚੁਣੋ Fileਅੱਪਗਰੇਡ ਕੀਤੇ ਫਰਮਵੇਅਰ ਨੂੰ ਚੁਣਨ ਲਈ
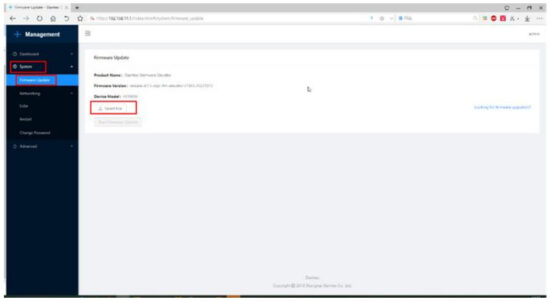
viii. ਫਰਮਵੇਅਰ ਨੂੰ ਅੱਪਗ੍ਰੇਡ ਕਰਨਾ ਸ਼ੁਰੂ ਕਰਨ ਲਈ "ਸਟਾਰਟ ਫਰਮਵੇਅਰ ਅੱਪਡੇਟ" 'ਤੇ ਕਲਿੱਕ ਕਰੋ।
ix. ਅੱਪਗ੍ਰੇਡ ਲੌਗ ਵਿੱਚ "ਸਫਲਤਾ" ਦੇ ਦਿਖਾਈ ਦੇਣ ਦੀ ਉਡੀਕ ਕਰੋ, ਅੱਪਗ੍ਰੇਡ ਪੂਰਾ ਹੋਇਆ।
g ਸੈਕੰਡਰੀ ਵਿਕਾਸ ਲਈ SDK ਦੀ ਵਰਤੋਂ ਕਰੋ
SLAMTEC Aurora SDK ਟੂਲਸ ਦਾ ਇੱਕ ਅਮੀਰ ਸੈੱਟ ਪ੍ਰਦਾਨ ਕਰਦਾ ਹੈ। ਉਪਭੋਗਤਾ ਸੈਕੰਡਰੀ ਵਿਕਾਸ ਲਈ ਢੁਕਵੇਂ SDK ਟੂਲ ਦੀ ਚੋਣ ਕਰ ਸਕਦੇ ਹਨ, ਜਿਸ ਵਿੱਚ ਸ਼ਾਮਲ ਹਨ:
- C++ SDK
- JAVA SDK
- ROS SDK
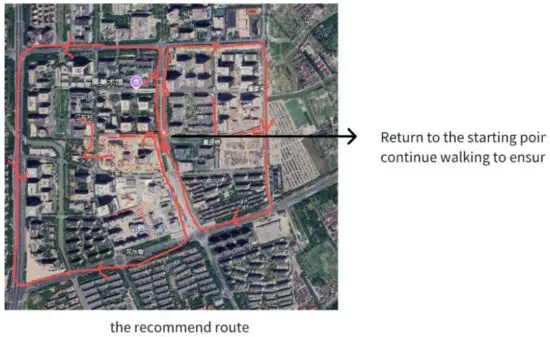
ਆਮ ਦ੍ਰਿਸ਼ ਰੂਟ ਯੋਜਨਾ ਸੁਝਾਅ
ਸਮੁੱਚੀ ਪ੍ਰਾਪਤੀ ਰੂਟ ਸਿਧਾਂਤ
➢ ਸਕੈਨਿੰਗ ਪ੍ਰਕਿਰਿਆ ਦੌਰਾਨ ਵੱਧ ਤੋਂ ਵੱਧ ਨਿਰੀਖਣਾਂ ਨੂੰ ਯਕੀਨੀ ਬਣਾਓ
➢ ਜਿੰਨਾ ਸੰਭਵ ਹੋ ਸਕੇ ਨਵੇਂ ਖੇਤਰਾਂ ਨੂੰ ਸਕੈਨ ਕਰਨ ਤੋਂ ਬਚਣ ਦੀ ਕੋਸ਼ਿਸ਼ ਕਰੋ ਅਤੇ ਇੱਕ ਖਾਸ ਲੂਪ ਲਓ
➢ ਜਿੰਨਾ ਸੰਭਵ ਹੋ ਸਕੇ ਗਤੀਸ਼ੀਲ ਵਸਤੂਆਂ ਦੇ ਪ੍ਰਭਾਵ ਤੋਂ ਬਚੋ
➢ ਜਿੰਨਾ ਸੰਭਵ ਹੋ ਸਕੇ ਬੰਦ-ਲੂਪ ਲੂਪਾਂ 'ਤੇ ਚੱਲੋ
ਨੋਟ:
- ਇੱਕ ਪੂਰਾ ਨਵਾਂ ਨਕਸ਼ਾ ਬਣਾਉਣ ਦੀ ਤਿਆਰੀ ਕਰਨ ਤੋਂ ਪਹਿਲਾਂ ਕਿਰਪਾ ਕਰਕੇ "ਕਲੀਅਰ ਮੈਪ" ਬਟਨ 'ਤੇ ਕਲਿੱਕ ਕਰੋ, ਨਹੀਂ ਤਾਂ ਮੈਪਿੰਗ ਓਪਟੀਮਾਈਜੇਸ਼ਨ ਇੰਜਣ ਦੇ ਪ੍ਰਭਾਵੀ ਹੋਣ ਦੀ ਗਰੰਟੀ ਨਹੀਂ ਦਿੱਤੀ ਜਾ ਸਕਦੀ ਹੈ।
- ਲੂਪ ਦੇ ਮੂਲ ਵੱਲ ਵਾਪਸ ਜਾਣ ਤੋਂ ਬਾਅਦ, ਰੋਬੋਟ ਨੂੰ ਹਿਲਾਉਂਦੇ ਰਹੋ ਅਤੇ ਓਵਰਲੈਪਿੰਗ ਵਾਲੇ ਹੋਰ ਰਸਤੇ ਲਓ। ਤੁਰੰਤ ਹਿੱਲਣਾ ਬੰਦ ਨਾ ਕਰੋ
- ਲੂਪ ਦੇ ਮੂਲ 'ਤੇ ਵਾਪਸ ਜਾਣ ਤੋਂ ਬਾਅਦ, ਜੇਕਰ ਨਕਸ਼ਾ ਬੰਦ ਨਹੀਂ ਹੈ, ਤਾਂ ਉਦੋਂ ਤੱਕ ਚੱਲਣਾ ਜਾਰੀ ਰੱਖੋ ਜਦੋਂ ਤੱਕ ਇਹ ਬੰਦ ਨਹੀਂ ਹੁੰਦਾ
- ਬੰਦ ਖੇਤਰਾਂ ਲਈ, ਪੁਰਾਣਾ ਰਸਤਾ ਲੈਣ ਤੋਂ ਬਚੋ ਅਤੇ ਮੈਮੋਰੀ ਦੀ ਖਪਤ ਘਟਾਓ
- ਅੰਦਰ ਅਤੇ ਬਾਹਰ
ਇਹ ਯਕੀਨੀ ਬਣਾਉਣ ਲਈ ਕਿ ਲੇਜ਼ਰ ਅਤੇ ਦਰਸ਼ਣ ਇੱਕ ਸਾਂਝੇ ਹਨ, ਤੁਹਾਨੂੰ ਅੰਦਰ ਜਾਣ ਅਤੇ ਪਾਸੇ ਤੋਂ ਬਾਹਰ ਜਾਣ ਦੀ ਲੋੜ ਹੈ view ਦਾਖਲ ਹੋਣ ਤੋਂ ਪਹਿਲਾਂ, ਅਤੇ ਡੇਟਾ ਨੂੰ ਬਿਹਤਰ ਢੰਗ ਨਾਲ ਕਨੈਕਟ ਕਰੋ
ਇੱਕ ਸੀਮਤ ਸਪੇਸ ਵਿੱਚ ਦਾਖਲ ਹੋਣਾ ਅਤੇ ਬਾਹਰ ਨਿਕਲਣਾ: ਇੱਕ ਸੀਮਤ ਸਪੇਸ ਨੂੰ ਸਕੈਨ ਕਰਨ ਤੋਂ ਬਾਅਦ, ਇਹ ਦੇਖਣਾ ਜ਼ਰੂਰੀ ਹੈ ਕਿ ਕੀ ਸੰਦਰਭ ਵਸਤੂਆਂ ਕਾਫ਼ੀ ਹਨ ਅਤੇ ਕੀ ਸਕੈਨਿੰਗ ਪ੍ਰਕਿਰਿਆ ਦੌਰਾਨ ਢਾਂਚਾਗਤ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਸਪੱਸ਼ਟ ਹਨ।
ਜੇਕਰ ਉਪਰੋਕਤ ਦੋ ਸ਼ਰਤਾਂ ਪੂਰੀਆਂ ਨਹੀਂ ਹੁੰਦੀਆਂ ਹਨ, ਤਾਂ ਇਕਸਾਰ ਕਰਨ ਦੀ ਕੋਸ਼ਿਸ਼ ਕਰੋ view ਪਰਿਪੇਖ ਵਿੱਚ ਕਿਸੇ ਵੀ ਸਖ਼ਤ ਤਬਦੀਲੀਆਂ ਤੋਂ ਬਚਦੇ ਹੋਏ, ਬਾਹਰ ਨਿਕਲਣ ਵੇਲੇ ਇੱਕ ਚੰਗੀ-ਸੰਗਠਿਤ ਵਿਸ਼ੇਸ਼ਤਾ ਖੇਤਰ ਵੱਲ।
ਨੋਟਸ
ਬੁਨਿਆਦੀ ਵਰਤੋਂ ਦੀਆਂ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ
➢ SLAMTEC Aurora ਇੱਕ ਸ਼ੁੱਧ ਉਪਕਰਨ ਹੈ। ਬਾਹਰੀ ਸ਼ਕਤੀਆਂ ਦੁਆਰਾ ਡਿੱਗਣ ਜਾਂ ਮਾਰਿਆ ਜਾਣਾ ਸਾਜ਼-ਸਾਮਾਨ ਨੂੰ ਨੁਕਸਾਨ ਪਹੁੰਚਾ ਸਕਦਾ ਹੈ, ਨਤੀਜੇ ਵਜੋਂ ਅਸਧਾਰਨ ਕੰਮ ਜਾਂ ਗਲਤ ਸਟੀਕਤਾ, ਜਾਂ ਸਾਜ਼-ਸਾਮਾਨ ਨੂੰ ਪੂਰਾ ਨੁਕਸਾਨ ਵੀ ਹੋ ਸਕਦਾ ਹੈ
➢ ਸਾਜ਼-ਸਾਮਾਨ ਨੂੰ ਸਾਫ਼ ਕਰਨ ਲਈ ਨਰਮ ਸੁੱਕੇ ਕੱਪੜੇ ਜਾਂ ਸਵੈ-ਪ੍ਰਦਾਨ ਕੀਤੇ ਸਫਾਈ ਵਾਲੇ ਕੱਪੜੇ ਦੀ ਵਰਤੋਂ ਕਰਨ ਦੀ ਸਿਫਾਰਸ਼ ਕੀਤੀ ਜਾਂਦੀ ਹੈ। ਕਿਰਪਾ ਕਰਕੇ ਰਾਡਾਰ ਅਤੇ ਲੈਂਸ ਦੇ ਹਿੱਸਿਆਂ ਨੂੰ ਸਾਫ਼ ਰੱਖੋ ਅਤੇ ਉਹਨਾਂ ਨੂੰ ਆਪਣੇ ਹੱਥਾਂ ਨਾਲ ਸਿੱਧਾ ਨਾ ਛੂਹੋ
➢ ਵਰਤੋਂ ਦੇ ਦੌਰਾਨ ਸਰੀਰ ਦੇ ਗਰਮੀ ਦੇ ਵਿਗਾੜ ਵਾਲੇ ਹਿੱਸੇ ਨੂੰ ਢੱਕੋ ਜਾਂ ਛੂਹੋ। ਜਦੋਂ ਵਰਤੋਂ ਦੌਰਾਨ ਡਿਵਾਈਸ ਦਾ ਤਾਪਮਾਨ ਬਹੁਤ ਜ਼ਿਆਦਾ ਹੁੰਦਾ ਹੈ, ਤਾਂ ਇਹ ਅਸਧਾਰਨ ਤੌਰ 'ਤੇ ਕੰਮ ਕਰ ਸਕਦਾ ਹੈ
ਸ਼ੁਰੂਆਤੀ ਪੜਾਅ ਸ਼ੁਰੂ ਕਰੋ
➢ ਸਾਜ਼ੋ-ਸਾਮਾਨ ਦੀ ਸ਼ੁਰੂਆਤ ਦੇ ਸ਼ੁਰੂਆਤੀ ਪੜਾਅ ਦੇ ਦੌਰਾਨ, ਇਹ ਯਕੀਨੀ ਬਣਾਉਣਾ ਜ਼ਰੂਰੀ ਹੈ ਕਿ ਉਪਕਰਣ ਸਥਿਰ ਹੈ ਅਤੇ ਜਿੰਨਾ ਸੰਭਵ ਹੋ ਸਕੇ ਹਿੱਲਣ ਤੋਂ ਮੁਕਤ ਹੈ।
➢ ਸ਼ੁਰੂਆਤੀਕਰਣ ਦੇ ਦੌਰਾਨ, ਔਰੋਰਾ ਨੂੰ ਵਧੇਰੇ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਵਾਲੇ ਖੇਤਰਾਂ ਨੂੰ ਨਿਸ਼ਾਨਾ ਬਣਾਉਣਾ ਚਾਹੀਦਾ ਹੈ, ਅਤੇ ਦੂਰੀ 2-3 ਮੀਟਰ ਦੇ ਅੰਦਰ ਹੋਣੀ ਚਾਹੀਦੀ ਹੈ, ਘੱਟ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਵਾਲੇ ਵਾਤਾਵਰਣ ਜਿਵੇਂ ਕਿ ਖੁੱਲੇ ਮੈਦਾਨਾਂ, ਰਿਫ੍ਰੈਕਟਿਵ ਵਾਤਾਵਰਨ ਜਿਵੇਂ ਕਿ ਸ਼ੀਸ਼ੇ ਦੇ ਵੱਡੇ ਖੇਤਰ, ਅਤੇ ਵਧੇਰੇ ਗਤੀਸ਼ੀਲ ਵਸਤੂਆਂ ਵਾਲੇ ਖੇਤਰਾਂ ਤੋਂ ਬਚਣਾ ਚਾਹੀਦਾ ਹੈ। ਲੋੜੀਂਦੀ ਸ਼ੁਰੂਆਤੀ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਨੂੰ ਯਕੀਨੀ ਬਣਾਉਣ ਅਤੇ ਬਿਹਤਰ ਡਾਟਾ ਨਤੀਜੇ ਪ੍ਰਾਪਤ ਕਰਨ ਲਈ। 3 ਸਕਿੰਟਾਂ ਲਈ ਸਥਿਰ ਰਹਿਣ ਅਤੇ ਸਿਸਟਮ ਦੇ ਸਫਲਤਾਪੂਰਵਕ ਸ਼ੁਰੂ ਹੋਣ ਦੀ ਉਡੀਕ ਕਰਨ ਤੋਂ ਬਾਅਦ, ਡਿਵਾਈਸ ਨੂੰ ਹਿਲਾਉਣਾ ਸ਼ੁਰੂ ਕਰੋ ਅਤੇ ਕੰਮ ਕਰਨ ਵਾਲੀ ਸਥਿਤੀ ਵਿੱਚ ਦਾਖਲ ਹੋਵੋ
ਉਪਕਰਣ ਕੰਮ ਕਰਨ ਦੇ ਪੜਾਅ
➢ ਸਰੀਰ ਦੇ ਤੇਜ਼ੀ ਨਾਲ ਘੁੰਮਣ ਜਾਂ ਅਚਾਨਕ ਰੁਕਣ ਤੋਂ ਬਚੋ, ਜਿਸ ਨਾਲ ਉਪਕਰਨਾਂ ਨੂੰ ਤੇਜ਼ੀ ਨਾਲ ਅਤੇ ਵੱਡੇ ਡਿਫਲੈਕਸ਼ਨ ਅਤੇ ਹਿੱਲਣ ਦਾ ਵੀ ਅਨੁਭਵ ਹੋ ਸਕਦਾ ਹੈ, ਜੋ ਕਿ ਮੈਪਿੰਗ ਦੀ ਸ਼ੁੱਧਤਾ ਅਤੇ ਪ੍ਰਭਾਵ ਨੂੰ ਕੁਝ ਹੱਦ ਤੱਕ ਪ੍ਰਭਾਵਿਤ ਕਰੇਗਾ।
➢ ਸਕੈਨਿੰਗ ਕਰਦੇ ਸਮੇਂ, ਆਮ ਤੁਰਨ ਦੀ ਗਤੀ ਨਾਲ ਚੱਲਣ ਦੀ ਸਿਫਾਰਸ਼ ਕੀਤੀ ਜਾਂਦੀ ਹੈ। ਘੱਟ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ, ਤੰਗ ਥਾਂਵਾਂ, ਮੋੜਾਂ ਆਦਿ ਵਾਲੀਆਂ ਸਥਿਤੀਆਂ ਲਈ, ਇਸਨੂੰ ਹੌਲੀ ਕਰਨ ਦੀ ਸਿਫਾਰਸ਼ ਕੀਤੀ ਜਾਂਦੀ ਹੈ
➢ ਆਮ ਪੈਦਲ ਚੱਲਣ ਦੀਆਂ ਸਥਿਤੀਆਂ ਵਿੱਚ, ਉਪਕਰਣ ਨੂੰ ਜਿੰਨਾ ਸੰਭਵ ਹੋ ਸਕੇ 20 ° ਤੋਂ ਵੱਧ ਨਹੀਂ ਝੁਕਣਾ ਚਾਹੀਦਾ ਹੈ
➢ ਕਈ ਕਮਰਿਆਂ ਜਾਂ ਫ਼ਰਸ਼ਾਂ ਵਾਲੇ ਅੰਦਰੂਨੀ ਦ੍ਰਿਸ਼ਾਂ ਨੂੰ ਸਕੈਨ ਕਰਦੇ ਸਮੇਂ, ਕਿਰਪਾ ਕਰਕੇ ਪਹਿਲਾਂ ਤੋਂ ਅੰਦਰ ਦਾ ਦਰਵਾਜ਼ਾ ਖੋਲ੍ਹੋ। ਦਰਵਾਜ਼ੇ ਵਿੱਚੋਂ ਲੰਘਦੇ ਸਮੇਂ, ਹੌਲੀ-ਹੌਲੀ ਸਕੈਨ ਕਰੋ ਅਤੇ ਦਰਵਾਜ਼ੇ ਦੇ ਇੱਕ ਪਾਸੇ ਸਮੇਂ ਦੀ ਮਿਆਦ ਲਈ ਰਹੋ ਤਾਂ ਜੋ ਇਹ ਯਕੀਨੀ ਬਣਾਇਆ ਜਾ ਸਕੇ ਕਿ ਦਰਵਾਜ਼ੇ ਦੇ ਦੋਵੇਂ ਪਾਸੇ ਦੀਆਂ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਇੱਕੋ ਸਮੇਂ ਸਕੈਨ ਕੀਤੀਆਂ ਜਾ ਸਕਦੀਆਂ ਹਨ। ਜੇਕਰ ਸਕੈਨਿੰਗ ਦੌਰਾਨ ਦਰਵਾਜ਼ਾ ਖੁੱਲ੍ਹਾ ਨਹੀਂ ਹੈ, ਤਾਂ ਦਰਵਾਜ਼ੇ ਦੇ ਨੇੜੇ ਆਉਣ ਤੋਂ ਪਹਿਲਾਂ ਹੌਲੀ-ਹੌਲੀ ਪਿੱਛੇ ਮੁੜੋ, ਸਾਧਨ ਨੂੰ ਦਰਵਾਜ਼ੇ ਤੋਂ ਦੂਰ ਮੋੜੋ, ਦਰਵਾਜ਼ਾ ਖੋਲ੍ਹਣ ਲਈ ਆਪਣੀ ਪਿੱਠ ਮੋੜੋ, ਅਤੇ ਹੌਲੀ-ਹੌਲੀ ਅੰਦਰ ਜਾਓ।
ਸੰਸ਼ੋਧਨ ਇਤਿਹਾਸ
| ਮਿਤੀ | ਸੰਸਕਰਣ | ਵਰਣਨ |
| 10/11/2024 | 1.0 | ਸ਼ੁਰੂਆਤੀ ਸੰਸਕਰਣ |
![]()
ਦਸਤਾਵੇਜ਼ / ਸਰੋਤ
 |
SLAMTEC Aurora ਮੈਪਿੰਗ ਅਤੇ ਸਥਾਨਕਕਰਨ ਹੱਲ [pdf] ਯੂਜ਼ਰ ਮੈਨੂਅਲ ਔਰੋਰਾ ਮੈਪਿੰਗ ਅਤੇ ਸਥਾਨਕਕਰਨ ਹੱਲ, ਅਰੋਰਾ, ਮੈਪਿੰਗ ਅਤੇ ਸਥਾਨੀਕਰਨ ਹੱਲ, ਸਥਾਨੀਕਰਨ ਹੱਲ, ਹੱਲ |