![]() ПандарView 2
ПандарView 2
Точка Облак
Софтвер за визуелизација
Упатство за употреба
ПандарView Софтвер за визуелизација на облак со 2 точки
www.hesaitech.com
 HESAI Wechat
HESAI Wechat
http://weixin.qq.com/r/Fzns9IXEl9jorcGX92wF
Документарна верзија: PV2-en-230710
За овој прирачник
■ Користење на овој прирачник
- Проверете дали го прочитавте ова упатство за употреба пред првата употреба и следете ги упатствата овде кога ракувате со производот. Неуспехот да се почитуваат упатствата може да резултира со оштетување на производот, загуба на имот, лични повреди и/или прекршување на гаранцијата.
- Ова упатство за употреба не содржи информации за сертификатите на производите. Ве молиме проверете ги ознаките за сертификација на долната плоча на производот и прочитајте ги соодветните предупредувања за сертификација.
- Ако го вклучите овој производ на лидар во вашиот производ(и), од вас се бара да го дадете ова упатство за употреба (или средства за пристап до ова упатство за корисникот) на наменетите корисници на вашиот производ(и)
- Овој производ лидар е наменет како компонента на краен производ. Ќе се оценува во краен производ според релевантните стандарди.
■ Пристап до овој прирачник
За да ја добиете најновата верзија:
- Посетете ја страницата за преземање на официјалниот претставник на Хесаи webсајт: https://www.hesaitech.com/en/download
- Или контактирајте го вашиот претставник за продажба во Хесаи
- Или контактирајте со тимот за техничка поддршка на Хесаи: service@hesaitech.com
■ Техничка поддршка
Ако вашето прашање не е адресирано во ова упатство за употреба, ве молиме контактирајте не на:
service@hesaitech.com
www.hesaitech.com/en/support
https://github.com/HesaiTechnology (Ве молиме оставете ги вашите прашања во соодветните проекти на GitHub.)
■ Легенди
![]() Предупредувања: инструкции кои мора да се следат за да се обезбеди безбедна и правилна употреба на производот.
Предупредувања: инструкции кои мора да се следат за да се обезбеди безбедна и правилна употреба на производот.
![]() Забелешки: дополнителни информации кои може да бидат корисни.
Забелешки: дополнителни информации кои може да бидат корисни.
Вовед
ПандарView 2 е софтвер од втора генерација што снима и прикажува податоци од облакот за точка од Хесаи лидари, достапни во:
- 64-битен Windows 10
- Ubuntu 16.04/18.04/20.04
![]() Ако вашиот компјутер користи графичка картичка AMD и работи на Ubuntu-20.04, преземете го двигателот за графика што поддржува Ubuntu-20.04 од официјалниот претставник на AMD webсајт. За дополнителни инструкции, ве молиме контактирајте со техничката поддршка на Hesai.
Ако вашиот компјутер користи графичка картичка AMD и работи на Ubuntu-20.04, преземете го двигателот за графика што поддржува Ubuntu-20.04 од официјалниот претставник на AMD webсајт. За дополнителни инструкции, ве молиме контактирајте со техничката поддршка на Hesai.
Овој прирачник го опишува ПандарView 2.0.101. Поддржани модели на производи:
| Пандар40 Пандар40М Пандар40П Пандар64 |
Pandar128E3X | PandarQT QT128C2X |
PandarXT PandarXT-16 XT32M2X |
AT128E2X | FT120 |
Инсталација
Преземете ја инсталацијата fileе од службеникот на Хесаи webсајт или контактирајте со техничката поддршка: www.hesaitech.com/en/download
| Систем | Инсталација Files |
| Windows | ПандарView_Release_Win64_V2.x.xx.msi |
| Убунту | ПандарView_Release_Ubuntu_V2.x.xx.bin |
![]() Во Ubuntu, стартувајте го PandarView.ш во а file патека која содржи само ASCII знаци.
Во Ubuntu, стартувајте го PandarView.ш во а file патека која содржи само ASCII знаци.
Софтверскиот интерфејс е поделен на четири дела, како што е прикажано подолу (деталите може да бидат различни).
„За“ во лентата со мени ја прикажува верзијата на софтверот.
Проверете го Live Point Cloud
За да примате податоци на вашиот компјутер, поставете ја IP адресата на компјутерот на 192.168.1.100 и маската на подмрежата на 255.255.255.0
| За Убунту: | За Windows: |
| Внесете ја оваа команда ifconfig во терминалот: ~$ sudo ifconfig enp0s20f0u2 192.168.1.100 (заменете го enp0s20f0u2 со името на локалната порта за етернет) |
Отворете го Центарот за споделување мрежа, кликнете на „Етернет“ Во полето „Статус на етернет“, кликнете на „Карактеристики“ Кликнете двапати на „Интернет протокол верзија 4 (TCP/IPv4)“ Конфигурирајте ја IP адресата на 192.168.1.100 и маската на подмрежата на 255.255.255.0 |
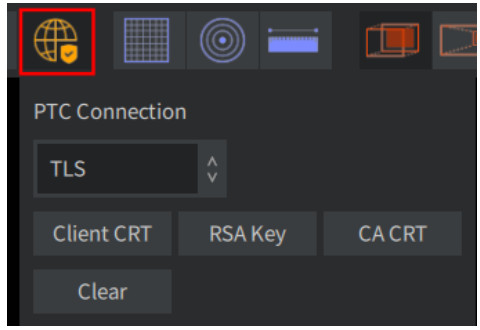
3.1 Конфигурација за сајбер безбедност
За моделите на производи кои поддржуваат сајбер безбедност, ![]() (Сајбер безбедност) ќе се појави во лентата со алатки.
(Сајбер безбедност) ќе се појави во лентата со алатки.
Корисниците можат да изберат еден од трите режими:
■ TLS режим
Во режимот TLS, ПандарView 2 автоматски ја враќа корекцијата на лидарската единица files користејќи команди PTCS (PTC преку TLS).
| Безбедносна страница на web контрола | ВКЛУЧЕТЕ го главниот прекинувач за сајбер безбедност. |
| Изберете TLS за PTC конекција. | |
| ПандарView 2 | Изберете TLS за PTC конекција. |
| Кликнете на копчето „CA CRT“ и наведете го file патека на синџирот на сертификати на Hesai CA (Hesai_Ca_Chain.crt). |
■ mTLS режим
Во режимот mTLS, ПандарView 2 автоматски ја враќа корекцијата на лидарската единица files користејќи PTCS команди.
| Безбедносна страница на web контрола | ВКЛУЧЕТЕ го главниот прекинувач за сајбер безбедност. |
| Изберете mTLS за PTC конекција; испратите синџир на сертификати на корисник CA. | |
| ПандарView 2 | Изберете mTLS за PTC конекција. |
| Кликнете на копчето „CA CRT“; наведете го file патека на синџирот на сертификати Hesai CA (Hesai_Ca_Chain.crt). | |
| Кликнете на копчето „Клиент CRT“; наведете го file патека на сертификат за крајниот ентитет на корисникот. | |
| Кликнете на копчето „RSA Key“; наведете го file патека на приватниот клуч на корисникот (што одговара на сертификатот за крајниот ентитет на корисникот). |
![]() Копчето „Исчисти“ го отстранува наведеното file патеки за CA CRT, Client CRT и RSA Key.
Копчето „Исчисти“ го отстранува наведеното file патеки за CA CRT, Client CRT и RSA Key.
■ Сајбер-безбедноста ИСКЛУЧЕНО
Во овој режим, ПандарView 2 автоматски ја враќа корекцијата на лидарската единица files користејќи PTC команди.
| Безбедносна страница на web контрола | Исклучете го главниот прекинувач за сајбер безбедност |
| ПандарView 2 | Изберете Non-TLS за PTC Connection |
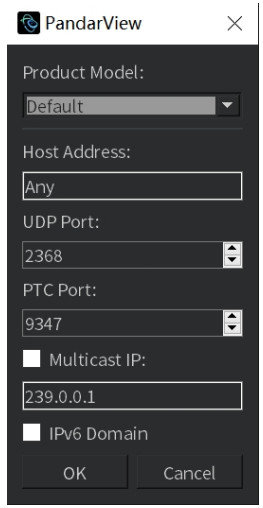
3.2 Примајте податоци во живо
- Лента со алатки:
 (Слушај Нет)
(Слушај Нет) - Во полето за дијалог што се појавува:
| Модел на производ | Стандардно |
| Адреса на домаќинот | Било кој |
| UDP пристаниште | Треба да биде исто како „Lidar Destination Port“ на страницата со поставки на web контрола. 2368 стандардно. |
| PTC пристаниште | Се користи за пренос на PTC команди. 9347 стандардно. |
| Multicast IP | Во режимот за повеќекратно емитување, проверете го полето за избор и наведете група за повеќекратно емитување |
| IPv6 домен | Поддржано само на одредени модели на производи |
![]() Додека примате податоци во живо:
Додека примате податоци во живо:
- Корисниците можат да ја извезат корекцијата на аголот file и корекција на времето на палење file, видете го делот 5.1 (Корекција на облакот во точка).
 Копчето (Live Streaming) во конзолата овозможува пренос на податоци во живо со минимална латентност.
Копчето (Live Streaming) во конзолата овозможува пренос на податоци во живо со минимална латентност.
![]()
3.3 Снимајте податоци во живо
Кликнете ![]() (Снимајте) во конзолата и наведете a file директориум. Кликнете на „Зачувај“ за да започнете со снимање на .pcap file.
(Снимајте) во конзолата и наведете a file директориум. Кликнете на „Зачувај“ за да започнете со снимање на .pcap file.
![]() При именување на .pcap files во Ubuntu, вклучете го fileпродолжување на името (.pcap).
При именување на .pcap files во Ubuntu, вклучете го fileпродолжување на името (.pcap).
Репродуцирајте го облакот Back Point
4.1 Отворете .PCAP File
- Кликнете
 (Отворено File) во лентата со алатки и изберете .pcap file во скокачкиот прозорец.
(Отворено File) во лентата со алатки и изберете .pcap file во скокачкиот прозорец.
Алтернативно, повлечете .pcap file во ПандарView 2. - Кога ќе заврши вчитувањето, во конзолата ќе се појави точка облак песна.

![]() Белешки
Белешки
- Поддржете го само форматот tcpdump pcap.
- Поддржувајте само една точка на облак песна одеднаш: кога примате податоци во живо или отворате нов .pcap file, претходната песна автоматски ќе се избрише.
- Голем .pcap fileможе да потрае некое време за да се вчита. Додека се вчитува, кликнете (Пренос во живо) за да се репродуцираат податоци од облакот за точки одеднаш.
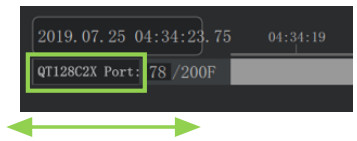
- Ако моделот на производот lidar и бројот на портата не се целосно прикажани, скролувајте го тркалцето на глувчето.
4.2 Контрола на репродукција 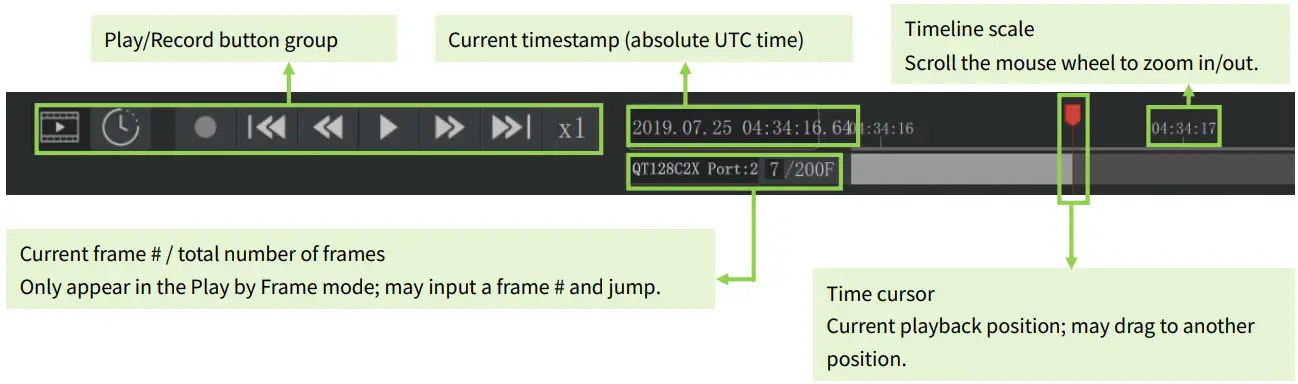
| Копче | Опис |
 |
Лево: игра по рамка (стандардно) Десно: репродуцирај според времето |
 |
Скокни до почетокот или крајот на file |
 |
Лево: приспособете ја брзината на премотување назад (1x, 1/2x, 1/4x, 1/8x, …, 1/64x) десно: приспособете ја брзината на премотување (1x, 2x, 4x, 8x, …, 64x) |
 |
Лево: по вчитување a file, кликнете за да играте. Десно: додека се игра а file, кликнете за да паузирате. |
 |
Прикажете ја моменталната брзина |
| Додека се вчитува а file, кликнете за да играте одеднаш. (Ова копче исчезнува кога ќе заврши вчитувањето.) Кога примате податоци во живо, кликнете за пренос со минимална латентност. |
Корекција и конфигурација
Кога проверувате облак со точки во живо или репродуцирате облак снимена точка, корекција files и конфигурација files може да се користат.
5.1 Корекција на облак на точка
| Корекција на агол | Поправете ги податоците за азимутот и висината. Видете дел 1.3 (Дистрибуција на канали) во упатството за употреба на lidar. |
| Корекција за време на пожар | За одредени модели на производи: поправете го азимутот на податоците од облакот во точка според времето на палење на секој канал. |
| Корекција на растојание | За одредени модели на производи: поправете ги податоците за растојанието. |
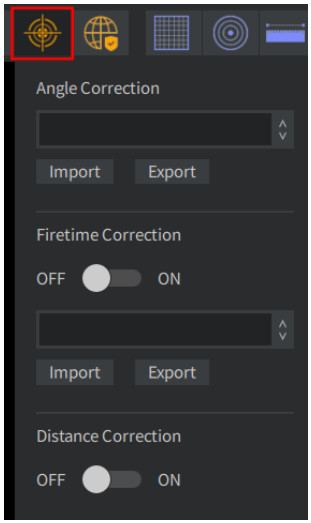
Кликнете ![]() (корекција) во лентата со алатки:
(корекција) во лентата со алатки:
| Вид на корекција | Опис |
| Корекција на агол | Кога го проверувате облакот на точка во живо: • ПандарView 2 автоматски ја враќа корекцијата file на оваа лидарска единица. При репродукција на облак снимена точка: • ПандарView 2 автоматски ја прикачува општата корекција file за овој модел на производ. • За најдобар приказ, кликнете „Увези“ и изберете ја исправката file на оваа лидарска единица. |
| Корекција за време на пожар | QT128C2X: • При проверка на облакот во живо точка: PandarView 2 автоматски ја враќа корекцијата file на оваа лидарска единица; префрлете се на ON и започнете со корекција. • При репродукција на облак снимена точка: PandarView 2 автоматски поставува општа корекција file за овој модел на производ; префрлете се на ON и започнете со корекција. Други модели на производи: • Префрлете се на ON, кликнете „Import“ и изберете ја исправката file на оваа лидарска единица. • Ако корекција на лидарската единица file не е достапно локално, префрлете се на ВКЛУЧЕНО и изберете општа корекција file за овој модел на производ во паѓачкото мени. |
| Корекција на растојание | Префрлете се на ON. |
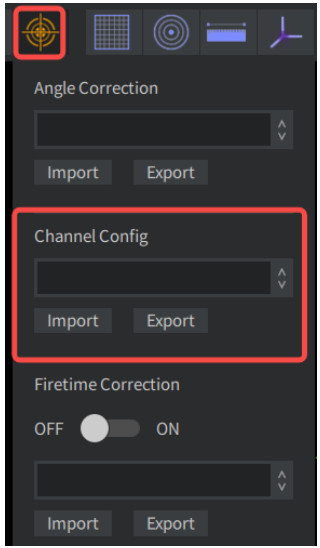
5.2 Конфигурација на каналот
Конфигурација на канал file избира подмножество од сите достапни канали на lidar, го дефинира бројот на блокови во Point Cloud Data Packet и ги одредува каналите што треба да се складираат во секој блок.
Достапно само за QT128C2X:
- При проверка на облакот во живо точка: ПандарView 2 автоматски ја враќа конфигурацијата на каналот file на оваа лидарска единица.
- Кога репродуцирате облак со снимена точка: кликнете
 (Корекција) во лентата со алатки, кликнете на „Увези“ во делот „Конфигурација на канали“ и изберете ја конфигурацијата на каналот file на оваа лидарска единица.
(Корекција) во лентата со алатки, кликнете на „Увези“ во делот „Конфигурација на канали“ и изберете ја конфигурацијата на каналот file на оваа лидарска единица.
5.3 File Увоз и извоз
File увоз
- При проверка на облакот во живо точка, копчето „Извоз“ може да се користи за преземање на корекција или конфигурација files на оваа лидарска единица.
- При именувањето на овие fileво Ubuntu, погрижете се да го вклучите fileпродолжување на името (.dat за корекција на аголот files од семејството AT, и .csv за другите).
File извоз
- Увезената корекција или конфигурација files се додаваат на дното од паѓачкото мени.
- Ако веќе не ви требаат files, можете да ги избришете од следната патека (ефективна по рестартирање на PandarView 2): Documents\PandarViewПодатоциFiles\csv
Други карактеристики
6.1 Кратенки на глувчето
| Повлечете го левото копче | Завртете го облакот на точката |
| Повлечете го десното копче | Зумирајте/одзумирате: влечете лево за одзумирање и десно за зумирање |
| Скролувајте го тркалото | Зумирајте/одзумирате: скролувајте надолу за да одзумирате и нагоре за да одзумирате |
| Притиснете на тркалото и повлечете | Панирајте го view |
| Shift и лево копче Влечете | Вртете го облакот од точка околу viewнасока (насока од viewукажуваат на потеклото на координатите) |
| Shift и влечење со десното копче | Панирајте го view |
6.2 Точка облак песни
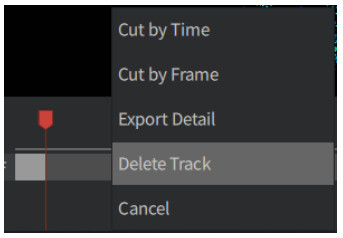
Десен-клик на точка облак песна:
| Пресечено според времето | Наведете го времето за почеток/крајamps, исечете ја тековната песна и зачувајте во нова .pcap file. |
| Исечете по рамка | Наведете ги почетните/крајните рамки, исечете ја тековната песна и зачувајте во нова .pcap file. |
| Детали за извоз | Откако ќе изберете област од точки (види Дел 6.3 Лента со алатки – Избор на точки и табела со податоци), наведете ги почетните/крајните рамки и извезете ги соодветните податоци од облакот за точки во .csv files. · Употреба · При именувањето на овие fileво Ubuntu, погрижете се да го вклучите fileпродолжување на името (.csv). |
| Избриши песна | Избришете ја тековната песна. |
| Откажи | Затворете го менито со десен клик. |
6.3 Лента со алатки
Ако ПандаротView 2 прозорецот е премногу тесен за да се прикаже лентата со алатки во целост, скролувајте го тркалцето на глувчето до view сите копчиња.
■ Координатни мрежи, координатен систем и мерење на растојание 
| Име на копчето | Функција |
| Декартов | Прикажи/сокриј ги решетките со растојание од 30 m |
| Поларна | Прикажи/сокриј ги круговите на еднакво растојание со растојание од 10 m |
| Владетел | Повлечете го левото копче за да го измерите растојанието помеѓу две точки |
| Координати | Покажете го правоаголниот координатен систем |
■ Режими на проекција

| Име на копчето | Функција |
| Правописна проекција | – |
| Проекција на перспектива | – |
■ Точка на View и Врти
| Име на копчето | Функција |
| Напред/Зад/лево/десно/горе | – |
| Спин | Завртете го viewнасока (насока од viewукажуваат на потеклото на координатите) околу Z-оската |
■ Избор на канал 
Кликнете ![]() (Канали) до view или сменете ги тековно прикажаните канали.
(Канали) до view или сменете ги тековно прикажаните канали.
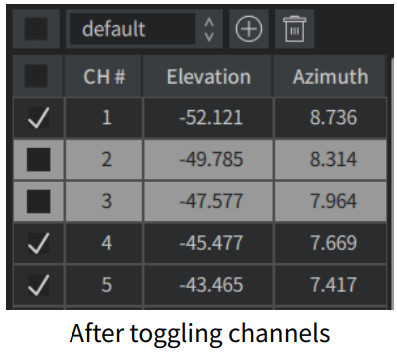
Прикажи или скриј канали
- Проверете/отштиклирајте ги полињата лево од секој канал за да се прикажат/скријаат податоците од облакот за точка.
- Стандардно, сите канали се прикажани.
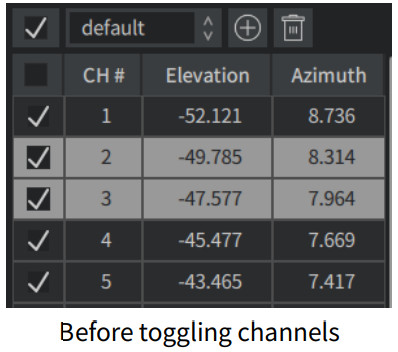
Изберете и вклучете канали
- Кликнете на канал (со исклучок на областа на неговото поле за избор) за да го изберете и означите овој канал.
- Држете Shift додека кликнувате за да изберете повеќе соседни канали.
- Држете Ctrl додека кликнувате за да изберете повеќе одделни канали.
- Кликнете
 (Премешајте ги избраните канали) во горниот лев агол за да ги префрлите избраните канали помеѓу штиклирани и отштиклирани.
(Премешајте ги избраните канали) во горниот лев агол за да ги префрлите избраните канали помеѓу штиклирани и отштиклирани.
Зачувајте групи на канали
- Кликнете
 да ги зачувате проверените канали како конфигурација и да ги именувате.
да ги зачувате проверените канали како конфигурација и да ги именувате. - Претходно зачуваните конфигурации постојат по рестартирање на PandarView 2 и може да се избере во
 паѓачкото мени.
паѓачкото мени. - За да ја избришете моментално избраната конфигурација, кликнете
 .
.
■ Избор на точки и табела со податоци
Кликнете ![]() (Изберете) и повлечете го глувчето за да означите област со точки.
(Изберете) и повлечете го глувчето за да означите област со точки.
Кликнете ![]() (Spread Sheet) до view податоците за означените точки, како што е прикажано подолу.
(Spread Sheet) до view податоците за означените точки, како што е прикажано подолу. 
Кога двапати се кликнува на насловот на полето повеќе пати, следните дејства се вршат едно по едно:
- Прилагодете ја ширината на колоната на името на полето
(Алтернативно, поставете го курсорот на глувчето помеѓу два заглавија така што курсорот ќе стане стрелка од лево-десно; повлечете го глувчето за да ја прилагодите ширината на колоната.) - Подреди го ова поле по растечки редослед. Стрела нагоре
 ќе се појави на десната страна.
ќе се појави на десната страна. - Подреди го ова поле по опаѓачки редослед. Стрела надолу
 ќе се појави на десната страна.
ќе се појави на десната страна. - Откажете го сортирањето.
Групата на копчиња во горниот лев агол:

| Изберете Сите | Кликнете за да се прикажат податоците за сите точки во оваа рамка. Кликнете повторно за да се прикажат само податоците од избраните точки. |
| Информации за извозни точки | Извезете ја тековната табела со податоци во .csv file. |
| Зачувај редослед на колони | Зачувајте го тековниот редослед на полето. Оваа поставка останува ефективна по рестартирање на PandarView 2. |
Полињата во табелата со податоци се дефинирани подолу:
| Ch | Канал # |
| AziCorr | Азимут коригиран со корекција на аголот file |
| Растојание | Растојание |
| Rfl | Рефлексивност |
| Ази | Азимут (тековен референтен агол на роторот) |
| Еле | Висина |
| t | Навременamp |
| Поле | За моделите на семејни производи AT: Површината на огледалото на која е направено ова мерење. Полињата 1/2/3 одговараат на Mirror Surfaces 0/1/2, соодветно. |
| АзиДржава | Азимутска држава Се користи за пресметување на поместувањето на времето на палење на секој канал; само за одредени модели на лидар. |
| доверба | Доверба |
■ Други контроли на екранот 
| Име на копчето | Функција |
| Филтер | Дефинирајте го опсегот на приказ на точка облак. |
| Ласерско следење | Покажете ги ласерските зраци на оваа лидарска единица. |
| Државни информации | Прикажи информации за статусот во долниот лев агол од областа за прикажување на облакот во точка, како што се брзина на моторот, режим на враќање и името на .PCAP file. |
| Исфрлете го PCD | Фрлете ја тековната рамка во .pcd (Point Cloud Data) file и наведете го file локација. |
| Карта во боја | Поставете ја шемата на бои на приказот на точката облак. |
| Големина на точка | Поставете ја големината на приказот на точките за податоци. |
| Режим на враќање | Изберете ги враќањата што ќе се прикажат. |
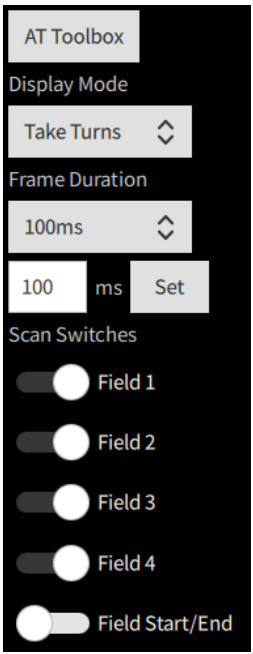
■ AT Family Toolbox
За модели на производи кои припаѓаат на семејството AT. 
| Режим на прикажување | Take Turns (стандардно): мерењата од Mirror Surfaces 0/1/2 се емитуваат во рамки 0/1/2, соодветно. Рамките не се зашиени. Комбинација: мерењата од Mirror Surfaces 0/1/2 се емитуваат на една рамка. Тоа е, три рамки се зашиени како една. Традиција: мерењата од Mirror Surfaces 0/1/2 се емитуваат на една рамка според нивните агли на енкодер во Point Cloud Data Packets. Не се врши корекција на аголот. |
| Времетраење на рамката | Временски прозорец за приказ на точка облак Во режимот за репродукција по време (видете дел 4.2 Контрола на репродукција), ќе се прикажат сите точки на податоци во овој временски прозорец. |
| Прекинувачи за скенирање | За прикажување или сокривање на мерењата од секоја површина на огледалото. Полињата 1/2/3 одговараат на Mirror Surfaces 0/1/2, соодветно. Полето 4 не се користи. |
| Почеток/Крај на теренот | Сè уште не е поддржано |
Решавање проблеми
Доколку следните постапки не можат да го решат проблемот, ве молиме контактирајте со техничката поддршка на Хесаи.
| Симптоми | Поени за проверка |
| Моторот Lidar работи, но не се добиваат излезни податоци, ниту на Wireshark ниту на PandarView. | Потврдете дека: · Етернет кабелот е правилно поврзан (со исклучување и повторно приклучување); · Лидар's Destination IP е правилно поставена на страницата Settings на web контрола; · хоризонталното FOV е правилно поставено на страницата Азимут FOV на web контрола; · Верзијата на фирмверот на сензорот е правилно прикажана на страницата за надградба на web контрола; · Лидар емитира ласерска светлина. Ова може да се провери со користење на инфрацрвена камера, картичка со инфрацрвен сензор или телефонска камера без инфрацрвен филтер. Вклучете го повторно за да проверите дали симптомот опстојува. |
| Може да прима податоци на Wireshark, но не и на PandarView. | Потврдете дека: · дестинациската порта Lidar е правилно поставена на страницата Поставки на web контрола · Заштитниот ѕид на компјутерот е оневозможен или тој PandarView се додава на исклучоците на заштитниот ѕид · ако VLAN е овозможен, VLAN ID на компјутерот е ист со оној на lidar · најновиот ПандарView верзија (видете ја страницата за преземање на официјалниот претставник на Хесаи webлокација или контактирајте со техничката поддршка на Hesai) е инсталирана на компјутерот Вклучете го повторно за да проверите дали симптомот опстојува. |
Додаток I Правно известување
Авторски права 2021 година од Хесаи технологија. Сите права се задржани. Забрането е користење или репродукција на овој прирачник во делови или во целост без овластување на Hesai.
Хесаи Технологија не дава никакви изјави или гаранции, изразени или имплицитни, во однос на содржината на овој документ и конкретно се отфрла од какви било гаранции, прометливост или соодветност за која било одредена цел. Понатаму, Hesai Technology го задржува правото да ја ревидира оваа публикација и да прави промени од време на време во содржината на овој документ без обврска да извести кое било лице за таквата ревизија или промени.
HESAI и HESAI логото се регистрирани заштитни знаци на Hesai Technology. Сите други трговски марки, сервисни марки и имиња на компании во овој прирачник или на службеното лице на Hesai webстраницата се својства на нивните соодветни сопственици.
Софтверот вклучен во овој производ содржи авторски права кои се регистрирани под Hesai Technology. На која било трета страна не му е дозволено, освен како што е изрично дозволено од давачот на лиценцата или изрично се бара со применливиот закон, да декомпајлира, обратно инженери, расклопува, менува, изнајмува, издава, позајмува, дистрибуира, дава подлиценца, создава изведени дела врз основа на целина или на кој било дел на софтверот.
Сервисниот прирачник за гаранција на производи на Hesai е на страницата Политика за гаранција на официјалниот претставник на Hesai webсајт: https://www.hesaitech.com/en/legal/warranty
Hesai Technology Co., Ltd.
Телефон: +86 400 805 1233
Webсајт: www.hesaitech.com
Адреса: Зграда L2, Светски центар Hongqiao, Шангај, Кина
Деловна е-пошта: info@hesaitech.com
Е-пошта на услугата: service@hesaitech.com