![]() PandarView 2
PandarView 2
Point Cloud
Visualization Software
User Manual
PandarView 2 Point Cloud Visualization Software
www.hesaitech.com
 HESAI Wechat
HESAI Wechat
http://weixin.qq.com/r/Fzns9IXEl9jorcGX92wF
Bersyon ng Doc: PV2-en-230710
Tungkol sa Manwal na Ito
■ Paggamit ng Manwal na Ito
- Siguraduhing basahin ang manwal ng paggamit na ito bago ang iyong unang paggamit at sundin ang mga tagubilin dito kapag pinaandar mo ang produkto. Ang pagkabigong sumunod sa mga tagubilin ay maaaring magresulta sa pagkasira ng produkto, pagkawala ng ari-arian, personal na pinsala, at/o paglabag sa warranty.
- Ang user manual na ito ay hindi naglalaman ng impormasyon sa mga sertipikasyon ng produkto. Pakisuri ang mga marka ng sertipikasyon sa ilalim na plato ng produkto at basahin ang mga kaukulang babala sa sertipikasyon.
- Kung isinasama mo ang produktong lidar na ito sa iyong (mga) produkto, kailangan mong ibigay ang user manual na ito (o ang paraan para ma-access ang user manual na ito) sa mga nilalayong user ng iyong (mga) produkto
- Ang produktong lidar na ito ay inilaan bilang isang bahagi ng isang pangwakas na produkto. Dapat itong suriin sa huling produkto ayon sa mga kaugnay na pamantayan.
■ Access sa Manwal na Ito
Upang makuha ang pinakabagong bersyon:
- Bisitahin ang Download page ng opisyal ni Hesai website: https://www.hesaitech.com/en/download
- O makipag-ugnayan sa iyong sales representative sa Hesai
- O makipag-ugnayan sa technical support team ni Hesai: service@hesaitech.com
■ Teknikal na Suporta
Kung ang iyong tanong ay hindi natugunan sa user manual na ito, mangyaring makipag-ugnayan sa amin sa:
service@hesaitech.com
www.hesaitech.com/en/support
https://github.com/HesaiTechnology (Mangyaring iwanan ang iyong mga tanong sa ilalim ng kaukulang mga proyekto ng GitHub.)
■ Mga alamat
![]() Mga Babala: mga tagubilin na dapat sundin upang matiyak ang ligtas at wastong paggamit ng produkto.
Mga Babala: mga tagubilin na dapat sundin upang matiyak ang ligtas at wastong paggamit ng produkto.
![]() Mga Tala: karagdagang impormasyon na maaaring makatulong.
Mga Tala: karagdagang impormasyon na maaaring makatulong.
Panimula
PandarView 2 ay isang pangalawang henerasyong software na nagtatala at nagpapakita ng point cloud data mula sa Hesai lidars, na available sa:
- 64-bit na Windows 10
- Ubuntu 16.04/18.04/20.04
![]() Kung ang iyong computer ay gumagamit ng AMD graphics card at tumatakbo sa Ubuntu-20.04, mangyaring i-download ang graphics driver na sumusuporta sa Ubuntu-20.04 mula sa opisyal ng AMD website. Para sa karagdagang mga tagubilin, mangyaring makipag-ugnayan sa teknikal na suporta ng Hesai.
Kung ang iyong computer ay gumagamit ng AMD graphics card at tumatakbo sa Ubuntu-20.04, mangyaring i-download ang graphics driver na sumusuporta sa Ubuntu-20.04 mula sa opisyal ng AMD website. Para sa karagdagang mga tagubilin, mangyaring makipag-ugnayan sa teknikal na suporta ng Hesai.
Inilalarawan ng manwal na ito ang PandarView 2.0.101. Mga sinusuportahang modelo ng produkto:
| Pandar40 Pandar40M Pandar40P Pandar64 |
Pandar128E3X | PandarQT QT128C2X |
PandarXT PandarXT-16 XT32M2X |
AT128E2X | FT120 |
Pag-install
I-download ang pag-install files mula sa opisyal ni Hesai website, o makipag-ugnayan sa teknikal na suporta: www.hesaitech.com/en/download
| Sistema | Pag-install Files |
| Windows | PandarView_Release_Win64_V2.x.xx.msi |
| Ubuntu | PandarView_Release_Ubuntu_V2.x.xx.bin |
![]() Sa Ubuntu, patakbuhin ang PandarView.sh sa isang file path na naglalaman lamang ng mga ASCII na character.
Sa Ubuntu, patakbuhin ang PandarView.sh sa isang file path na naglalaman lamang ng mga ASCII na character.
Ang interface ng software ay nahahati sa apat na seksyon, tulad ng ipinapakita sa ibaba (maaaring iba ang mga detalye).
Ipinapakita ng “About” sa menu bar ang bersyon ng software.
Suriin ang Live Point Cloud
Upang makatanggap ng data sa iyong PC, itakda ang IP address ng PC sa 192.168.1.100 at subnet mask sa 255.255.255.0
| Para sa Ubuntu: | Para sa Windows: |
| Ipasok ang ifconfig command na ito sa terminal: ~$ sudo ifconfig enp0s20f0u2 192.168.1.100 (palitan ang enp0s20f0u2 ng lokal na pangalan ng port ng Ethernet) |
Buksan ang Network Sharing Center, mag-click sa "Ethernet" Sa kahon ng "Ethernet Status", i-click ang "Properties" Mag-double click sa “Internet Protocol Version 4 (TCP/IPv4)” I-configure ang IP address sa 192.168.1.100 at subnet mask sa 255.255.255.0 |
3.1 Configuration ng Cybersecurity
Para sa mga modelo ng produkto na sumusuporta sa Cybersecurity, ![]() (Cybersecurity) ay lalabas sa toolbar.
(Cybersecurity) ay lalabas sa toolbar.
Maaaring pumili ang mga user ng isa sa tatlong mga mode:
■ TLS Mode
Sa TLS Mode, PandarView Awtomatikong kinukuha ng 2 ang pagwawasto ng lidar unit files gamit ang mga utos ng PTCS (PTC over TLS).
| Pahina ng seguridad ng web kontrol | I-ON ang Cyber Security Master Switch. |
| Piliin ang TLS para sa PTC Connection. | |
| PandarView 2 | Piliin ang TLS para sa PTC Connection. |
| I-click ang button na “CA CRT” at tukuyin ang file landas ng chain ng CA certificate ng Hesai (Hesai_Ca_Chain.crt). |
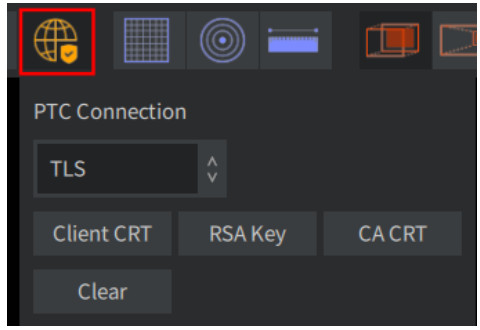
■ Mode ng mTLS
Sa mTLS Mode, PandarView Awtomatikong kinukuha ng 2 ang pagwawasto ng lidar unit files gamit ang mga utos ng PTCS.
| Pahina ng seguridad ng web kontrol | I-ON ang Cyber Security Master Switch. |
| Piliin ang mTLS para sa PTC Connection; mag-upload ng chain ng certificate ng CA ng user. | |
| PandarView 2 | Piliin ang mTLS para sa PTC Connection. |
| I-click ang button na “CA CRT”; tukuyin ang file landas ng chain ng sertipiko ng Hesai CA (Hesai_Ca_Chain.crt). | |
| I-click ang button na "Client CRT"; tukuyin ang file landas ng certificate ng end-entity ng user. | |
| I-click ang pindutang "RSA Key"; tukuyin ang file path ng user private key (naaayon sa user end-entity certificate). |
![]() Inaalis ng "Clear" na button ang tinukoy file path para sa CA CRT, Client CRT, at RSA Key.
Inaalis ng "Clear" na button ang tinukoy file path para sa CA CRT, Client CRT, at RSA Key.
■ Cybersecurity NAKA-OFF
Sa mode na ito, si PandarView Awtomatikong kinukuha ng 2 ang pagwawasto ng lidar unit files gamit ang mga utos ng PTC.
| Pahina ng seguridad ng web kontrol | I-OFF ang Cyber Security Master Switch |
| PandarView 2 | Piliin ang Non-TLS para sa PTC Connection |
3.2 Tumanggap ng Live na Data
- toolbar:
 (Makinig Net)
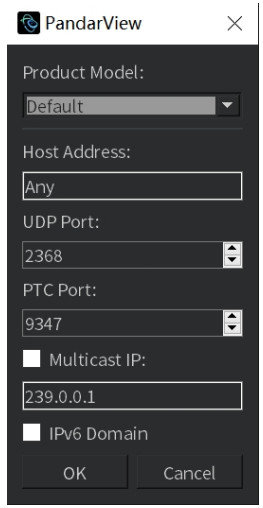
(Makinig Net) - Sa pop-up na dialog box:
| Modelo ng Produkto | Default |
| Tirahan ng tagapag-anyaya | Anuman |
| UDP Port | Dapat ay kapareho ng "Lidar Destination Port" sa page ng Mga Setting ng web kontrol. 2368 bilang default. |
| PTC Port | Ginagamit para sa pagpapadala ng mga utos ng PTC. 9347 bilang default. |
| Multicast IP | Sa multicast mode, lagyan ng check ang checkbox at tumukoy ng multicast na grupo |
| IPv6 Domain | Sinusuportahan lamang sa ilang partikular na modelo ng produkto |
![]() Habang tumatanggap ng live na data:
Habang tumatanggap ng live na data:
- Maaaring i-export ng mga user ang pagwawasto ng anggulo file at ang pagwawasto ng oras ng pagpapaputok file, tingnan ang Seksyon 5.1 (Point Cloud Correction).
 Ang (Live Streaming) na button sa console ay nagbibigay-daan sa minimum-latency na streaming ng live na data.
Ang (Live Streaming) na button sa console ay nagbibigay-daan sa minimum-latency na streaming ng live na data.
![]()
3.3 Magtala ng Live na Data
I-click ![]() (Record) sa console at tukuyin ang a file direktoryo. I-click ang "I-save" upang simulan ang pag-record ng .pcap file.
(Record) sa console at tukuyin ang a file direktoryo. I-click ang "I-save" upang simulan ang pag-record ng .pcap file.
![]() Kapag pinangalanan ang .pcap files sa Ubuntu, isama ang fileextension ng pangalan (.pcap).
Kapag pinangalanan ang .pcap files sa Ubuntu, isama ang fileextension ng pangalan (.pcap).
Maglaro ng Back Point Cloud
4.1 Magbukas ng .PCAP File
- I-click
 (Buksan File) sa toolbar at pumili ng .pcap file sa pop-up window.
(Buksan File) sa toolbar at pumili ng .pcap file sa pop-up window.
Bilang kahalili, i-drag ang isang .pcap file sa PandarView 2. - Kapag kumpleto na ang paglo-load, may lalabas na point cloud track sa console.

![]() Mga Tala
Mga Tala
- Suportahan lamang ang tcpdump pcap format.
- Suportahan lang ang isang point cloud track sa isang pagkakataon: kapag tumatanggap ng live na data o nagbukas ng bagong .pcap file, ang nakaraang track ay awtomatikong tatanggalin.
- Malaking .pcap fileMaaaring magtagal bago mag-load. Habang naglo-load, i-click (Live Streaming) upang i-play ang data ng point cloud nang sabay-sabay.
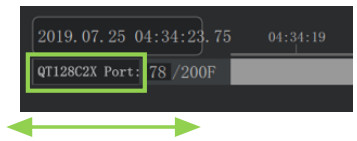
- Kung ang modelo ng produkto ng lidar at numero ng port ay hindi ipinapakita nang buo, mag-scroll sa gulong ng mouse.
4.2 Kontrol sa Paglalaro 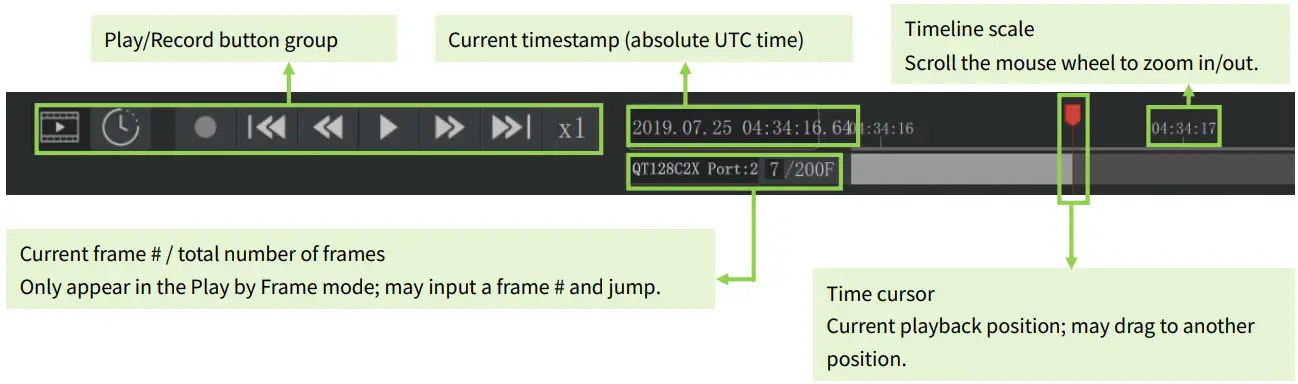
| Pindutan | Paglalarawan |
 |
Kaliwa: play ayon sa frame (default) Kanan: play ayon sa oras |
 |
Tumalon sa simula o dulo ng file |
 |
Kaliwa: ayusin ang bilis ng pag-rewinding (1x, 1/2x, 1/4x, 1/8x, …, 1/64x) Kanan: ayusin ang bilis ng pagpapasa (1x, 2x, 4x, 8x, …, 64x) |
 |
Kaliwa: pagkatapos magkarga ng a file, i-click para maglaro. Kanan: habang naglalaro ng a file, i-click upang i-pause. |
 |
Ipakita ang kasalukuyang bilis |
| Habang naglo-load ng a file, i-click upang maglaro nang sabay-sabay. (Mawawala ang button na ito kapag kumpleto na ang paglo-load.) Kapag tumatanggap ng live na data, mag-click para mag-stream nang may minimum na latency. |
Pagwawasto at Pag-configure
Kapag sinusuri ang live point cloud o nagpe-play back ng naitalang point cloud, iwasto files at pagsasaayos files ay maaaring gamitin.
5.1 Point Cloud Correction
| Pagwawasto ng Anggulo | Iwasto ang data ng azimuth at elevation. Tingnan ang Seksyon 1.3 (Channel Distribution) sa lidar user manual. |
| Pagwawasto sa Sunog | Para sa ilang partikular na modelo ng produkto: itama ang azimuth ng data ng point cloud ayon sa oras ng pagpapaputok ng bawat channel. |
| Pagwawasto ng Distansya | Para sa ilang partikular na modelo ng produkto: itama ang data ng distansya. |
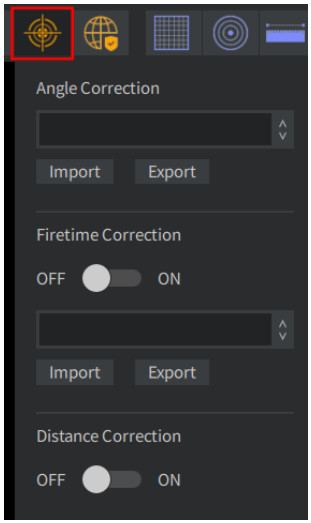
I-click ![]() (Pagwawasto) sa toolbar:
(Pagwawasto) sa toolbar:
| Uri ng Pagwawasto | Paglalarawan |
| Pagwawasto ng Anggulo | Kapag sinusuri ang live point cloud: • PandarView Awtomatikong kinukuha ng 2 ang pagwawasto file ng lidar unit na ito. Kapag nagpe-play muli ng naitala na point cloud: • PandarView Awtomatikong ina-upload ng 2 ang pangkalahatang pagwawasto file para sa modelong ito ng produkto. • Para sa pinakamahusay na display, i-click ang “Import” at piliin ang pagwawasto file ng lidar unit na ito. |
| Pagwawasto sa Sunog | QT128C2X: • Kapag sinusuri ang live point cloud: PandarView Awtomatikong kinukuha ng 2 ang pagwawasto file ng lidar unit na ito; lumipat sa ON at simulan ang pagwawasto. • Kapag nagpe-play muli ng naitala na point cloud: PandarView 2 ay awtomatikong nag-a-upload ng pangkalahatang pagwawasto file para sa modelo ng produktong ito; lumipat sa ON at simulan ang pagwawasto. Iba pang mga modelo ng produkto: • Lumipat sa ON, i-click ang “Import” at piliin ang pagwawasto file ng lidar unit na ito. • Kung ang lidar unit's correction file ay hindi available sa lokal, lumipat sa ON at pumili ng pangkalahatang pagwawasto file para sa modelo ng produktong ito sa drop-down na menu. |
| Pagwawasto ng Distansya | Lumipat sa ON. |
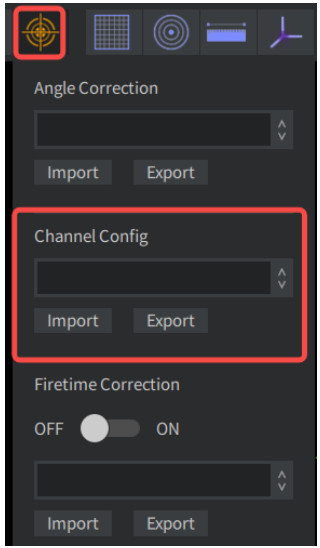
5.2 Configuration ng Channel
Isang pagsasaayos ng channel file pumipili ng subset mula sa lahat ng available na channel ng isang lidar, tinutukoy ang bilang ng mga block sa isang Point Cloud Data Packet, at tinutukoy ang mga channel na iimbak sa bawat block.
Available lang para sa QT128C2X:
- Kapag sinusuri ang live point cloud: PandarView Awtomatikong kinukuha ng 2 ang configuration ng channel file ng lidar unit na ito.
- Kapag nagpe-play muli ng naitala na point cloud: i-click
 (Pagwawasto) sa toolbar, i-click ang “Import” sa seksyong Channel Config, at piliin ang configuration ng channel file ng lidar unit na ito.
(Pagwawasto) sa toolbar, i-click ang “Import” sa seksyong Channel Config, at piliin ang configuration ng channel file ng lidar unit na ito.
5.3 File Mag-import at Mag-export
File import
- Kapag sinusuri ang live point cloud, maaaring gamitin ang button na "I-export" para i-download ang pagwawasto o configuration files ng lidar unit na ito.
- Kapag pinangalanan ang mga ito files sa Ubuntu, tiyaking isama ang fileextension ng pangalan (.dat para sa pagwawasto ng anggulo files ng AT family, at .csv para sa iba pa).
File i-export
- Ang na-import na pagwawasto o pagsasaayos files ay idinaragdag sa ibaba ng drop-down na menu.
- Kung hindi mo na kailangan ang mga iyon files, maaari mong tanggalin ang mga ito mula sa sumusunod na landas (epektibo pagkatapos i-restart ang PandarView 2): Documents\PandarViewDataFiles\csv
Iba pang Mga Tampok
6.1 Mga Shortcut ng Mouse
| Kaliwa-Button Drag | I-rotate ang point cloud |
| I-drag ang Right-Button | Mag-zoom in/out: pag-drag pakaliwa para sa pag-zoom out, at pakanan para sa pag-zoom in |
| I-scroll ang Gulong | Mag-zoom in/out: pag-scroll pababa para sa pag-zoom out, at pataas para sa pag-zoom in |
| Pindutin ang Wheel at I-drag | I-pan ang view |
| Shift at Left-Button Drag | Paikutin ang point cloud sa paligid ng viewdireksyon (ang direksyon mula sa viewituro ang pinagmulan ng mga coordinate) |
| Shift at Right-Button Drag | I-pan ang view |
6.2 Point Cloud Tracks
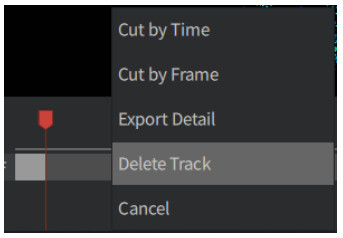
Mag-right-click sa isang point cloud track:
| Pinutol ng Oras | Tukuyin ang oras ng pagsisimula/pagtataposamps, i-cut ang kasalukuyang track, at i-save sa isang bagong .pcap file. |
| Pinutol ng Frame | Tukuyin ang panimulang/pagtatapos na mga frame, gupitin ang kasalukuyang track, at i-save sa isang bagong .pcap file. |
| I-export ang Detalye | Pagkatapos pumili ng lugar ng mga punto (tingnan ang Seksyon 6.3 Toolbar – Pagpili ng Punto at Talahanayan ng Data), tukuyin ang mga frame ng panimula/pagtatapos at i-export ang kaukulang data ng point cloud sa .csv files. · Gamitin · Kapag pinangalanan ang mga ito files sa Ubuntu, tiyaking isama ang fileextension ng pangalan (.csv). |
| Tanggalin ang Track | Tanggalin ang kasalukuyang track. |
| Kanselahin | Isara ang right-click na menu. |
6.3 Toolbar
Kung ang PandarView 2 na window ay masyadong makitid upang ipakita ang toolbar nang buo, i-scroll ang mouse wheel sa view lahat ng mga pindutan.
■ Mga Coordinate Grid, Coordinate System, at Pagsukat ng Distansya 
| Pangalan ng Pindutan | Function |
| Cartesian | Ipakita/itago ang mga grid na may 30 m spacing |
| Polar | Ipakita/itago ang magkaparehong distansiya na mga bilog na may 10 m na espasyo |
| Tagapamahala | I-drag ang Left-Button upang sukatin ang distansya sa pagitan ng dalawang punto |
| Mga coordinate | Ipakita ang rectangular coordinate system |
■ Mga Mode ng Projection

| Pangalan ng Pindutan | Function |
| Orthographic Projection | – |
| Projection ng Pananaw | – |
■ Punto ng View at Umiikot
| Pangalan ng Pindutan | Function |
| Harap/Likod/Kaliwa/Kanan/Itaas | – |
| Iikot | Paikutin ang viewdireksyon (ang direksyon mula sa viewituro ang pinagmulan ng mga coordinate) sa paligid ng Z-axis |
■ Pagpili ng Channel 
I-click ![]() (Mga Channel) sa view o baguhin ang kasalukuyang ipinapakitang mga channel.
(Mga Channel) sa view o baguhin ang kasalukuyang ipinapakitang mga channel.
Ipakita o itago ang mga channel
- Lagyan ng check/Alisin ang check sa mga kahon sa kaliwa ng bawat channel para ipakita/itago ang point cloud data nito.
- Bilang default, ipinapakita ang lahat ng channel.
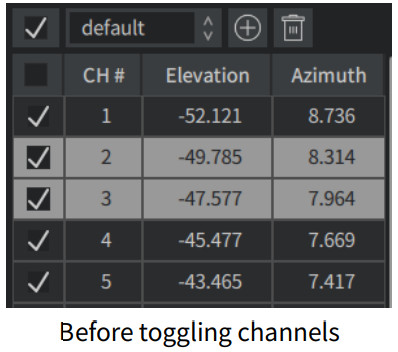
Piliin at i-toggle ang mga channel
- Mag-click sa isang channel (hindi kasama ang lugar ng checkbox nito) upang piliin at i-highlight ang channel na ito.
- Pindutin nang matagal ang Shift habang nagki-click para pumili ng maramihang kalapit na channel.
- Pindutin nang matagal ang Ctrl habang nagki-click upang pumili ng maramihang magkahiwalay na channel.
- I-click
 (I-toggle ang Mga Piniling Channel) sa kaliwang sulok sa itaas upang i-toggle ang mga napiling channel sa pagitan ng may check at hindi naka-check.
(I-toggle ang Mga Piniling Channel) sa kaliwang sulok sa itaas upang i-toggle ang mga napiling channel sa pagitan ng may check at hindi naka-check.
I-save ang mga pangkat ng channel
- I-click
 upang i-save ang mga naka-check na channel bilang configuration at pangalanan ito.
upang i-save ang mga naka-check na channel bilang configuration at pangalanan ito. - Ang mga dating naka-save na configuration ay umiiral pagkatapos i-restart ang PandarView 2 at maaaring mapili sa
 drop-down na menu.
drop-down na menu. - Upang tanggalin ang kasalukuyang napiling configuration, i-click
 .
.
■ Pagpili ng Punto at Talahanayan ng Data
I-click ![]() (Piliin) at i-drag ang mouse upang i-highlight ang isang lugar ng mga puntos.
(Piliin) at i-drag ang mouse upang i-highlight ang isang lugar ng mga puntos.
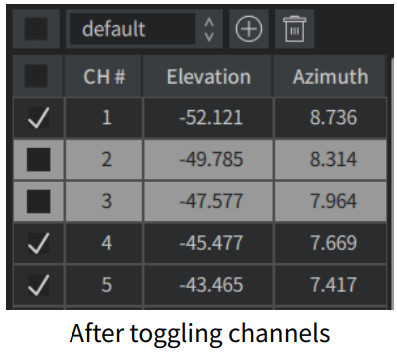
I-click ![]() (Spread Sheet) sa view ang data ng mga naka-highlight na punto, tulad ng ipinapakita sa ibaba.
(Spread Sheet) sa view ang data ng mga naka-highlight na punto, tulad ng ipinapakita sa ibaba. 
Kapag nag-double click sa isang field na heading nang maraming beses, ang mga sumusunod na aksyon ay isa-isang isasagawa:
- Ibagay ang lapad ng column sa pangalan ng field
(Bilang kahalili, ilagay ang cursor ng mouse sa pagitan ng dalawang heading upang ang cursor ay maging kaliwa-kanang arrow; i-drag ang mouse upang ayusin ang lapad ng column.) - Pagbukud-bukurin ang field na ito sa pamamagitan ng pataas na pagkakasunud-sunod. Isang pataas na arrow
 lalabas sa kanan.
lalabas sa kanan. - Pagbukud-bukurin ang field na ito sa pamamagitan ng pababang pagkakasunud-sunod. Isang pababang arrow
 lalabas sa kanan.
lalabas sa kanan. - Kanselahin ang pag-uuri.
Ang pangkat ng button sa kaliwang sulok sa itaas:

| Piliin ang Lahat | I-click upang ipakita ang data ng lahat ng mga punto sa frame na ito. Mag-click muli upang ipakita lamang ang data ng mga napiling punto. |
| I-export ang Impormasyon ng Mga Punto | I-export ang kasalukuyang talahanayan ng data sa isang .csv file. |
| I-save ang Column Order | I-save ang kasalukuyang field order. Nananatiling epektibo ang setting na ito pagkatapos i-restart ang PandarView 2. |
Ang mga patlang sa talahanayan ng data ay tinukoy sa ibaba:
| Ch | Channel # |
| AziCorr | Ang Azimuth ay naitama sa pamamagitan ng pagwawasto ng anggulo file |
| Ilayo | Distansya |
| Rfl | Reflectivity |
| Azi | Azimuth (kasalukuyang reference angle ng rotor) |
| Ele | Elevation |
| t | Orasamp |
| Patlang | Para sa mga modelo ng produkto ng pamilya ng AT: ang Mirror Surface kung saan ginawa ang pagsukat na ito. Ang mga field 1/2/3 ay tumutugma sa Mirror Surfaces 0/1/2, ayon sa pagkakabanggit. |
| AziState | Estado ng Azimuth Ginagamit para sa pagkalkula ng oras ng pagpapaputok offset ng bawat channel; para lamang sa ilang mga modelo ng lidar. |
| kumpiyansa | Pagtitiwala |
■ Iba pang Mga Kontrol sa Display 
| Pangalan ng Pindutan | Function |
| Salain | Tukuyin ang hanay ng point cloud display. |
| Laser Tracing | Ipakita ang mga laser beam ng lidar unit na ito. |
| Impormasyon ng Estado | Ipakita ang impormasyon ng status sa ibabang kaliwang sulok ng lugar ng pagpapakita ng point cloud, gaya ng Bilis ng Motor, Return Mode, at ang pangalan ng .PCAP file. |
| Itapon ang PCD | Itapon ang kasalukuyang frame sa isang .pcd (Point Cloud Data) file at tukuyin ang file lokasyon. |
| Mapa ng Kulay | Itakda ang color scheme ng point cloud display. |
| Laki ng Punto | Itakda ang laki ng display ng mga data point. |
| Return Mode | Piliin ang mga pagbabalik na ipapakita. |
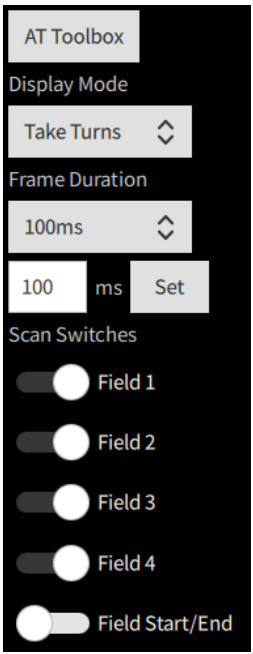
■ AT Family Toolbox
Para sa mga modelo ng produkto na kabilang sa pamilya ng AT. 
| Display Mode | Take Turns (default): ang mga sukat mula sa Mirror Surfaces 0/1/2 ay output sa Frames 0/1/2, ayon sa pagkakabanggit. Ang mga frame ay hindi natahi. Kumbinasyon: ang mga sukat mula sa Mirror Surfaces 0/1/2 ay output sa isang frame. Iyon ay, tatlong frame ang tinahi bilang isa. Tradisyon: ang mga sukat mula sa Mirror Surfaces 0/1/2 ay output sa isang frame ayon sa kanilang mga anggulo ng encoder sa Point Cloud Data Packets. Walang ginagawang pagwawasto ng anggulo. |
| Tagal ng Frame | Time window para sa point cloud display Sa ilalim ng play-by-time mode (tingnan ang Seksyon 4.2 Play Control), lahat ng data point sa loob ng window na ito ay ipapakita. |
| Scan Switch | Upang ipakita o itago ang mga sukat mula sa bawat ibabaw ng salamin. Ang mga field 1/2/3 ay tumutugma sa Mirror Surfaces 0/1/2, ayon sa pagkakabanggit. Hindi ginagamit ang field 4. |
| Field Start/End | Hindi pa sinusuportahan |
Pag-troubleshoot
Kung sakaling hindi malutas ng mga sumusunod na pamamaraan ang problema, mangyaring makipag-ugnayan sa teknikal na suporta ng Hesai.
| Mga sintomas | Mga Puntos na Dapat Suriin |
| Ang Lidar motor ay tumatakbo, ngunit walang output data na natatanggap, alinman sa Wireshark o sa PandarView. | I-verify na: · Ang Ethernet cable ay maayos na konektado (sa pamamagitan ng pag-unplug at pag-plug muli); · Ang Destination IP ng Lidar ay wastong nakatakda sa pahina ng Mga Setting ng web kontrol; · Ang pahalang na FOV ay wastong nakatakda sa Azimuth FOV page ng web kontrol; · Ang bersyon ng firmware ng sensor ay tama na ipinapakita sa pahina ng Pag-upgrade ng web kontrol; · Ang Lidar ay naglalabas ng ilaw ng laser. Maaari itong suriin sa pamamagitan ng paggamit ng isang infrared camera, isang infrared sensor card, o isang camera ng telepono na walang infrared na filter. I-on muli upang suriin kung nagpapatuloy ang sintomas. |
| Maaaring makatanggap ng data sa Wireshark ngunit hindi sa PandarView. | I-verify na: · Ang Lidar Destination Port ay naitakda nang tama sa pahina ng Mga Setting ng web kontrol · Ang firewall ng PC ay hindi pinagana, o ang Pandar na iyonView ay idinagdag sa mga pagbubukod sa firewall · kung ang VLAN ay pinagana, ang VLAN ID ng PC ay kapareho ng sa lidar · ang pinakabagong PandarView bersyon (tingnan ang Download page ng opisyal ni Hesai website o contact Hesai technical support) ay naka-install sa PC I-on muli upang suriin kung nagpapatuloy ang sintomas. |
Apendise I Legal na Paunawa
Copyright 2021 ng Hesai Technology. Lahat ng karapatan ay nakalaan. Ang paggamit o pagpaparami ng manwal na ito sa mga bahagi o kabuuan nito nang walang pahintulot ng Hesai ay ipinagbabawal.
Ang Hesai Technology ay hindi gumagawa ng mga representasyon o warranty, ipinahayag man o ipinahiwatig, na may kinalaman sa mga nilalaman nito at partikular na itinatanggi ang anumang mga warranty, kakayahang maikalakal, o angkop para sa anumang partikular na layunin. Dagdag pa rito, inilalaan ng Hesai Technology ang karapatan na baguhin ang publikasyong ito at gumawa ng mga pagbabago sa pana-panahon sa mga nilalaman nito nang walang obligasyon na ipaalam sa sinumang tao ang naturang rebisyon o pagbabago.
Ang HESAI at HESAI logo ay mga rehistradong trademark ng Hesai Technology. Lahat ng iba pang trademark, service mark, at pangalan ng kumpanya sa manwal na ito o sa opisyal ng Hesai webAng site ay mga pag-aari ng kani-kanilang mga may-ari.
Ang software na kasama sa produktong ito ay naglalaman ng copyright na nakarehistro sa ilalim ng Hesai Technology. Ang sinumang third party ay hindi pinahihintulutan, maliban kung hayagang pinahihintulutan ng tagapaglisensya o hayagang iniaatas ng naaangkop na batas, na mag-decompile, mag-reverse engineer, mag-disassemble, magbago, magrenta, mag-lease, mag-loan, distribute, sublicense, lumikha ng mga derivative works batay sa kabuuan o anumang bahagi ng software.
Ang Hesai Product Warranty Service Manual ay nasa page ng Warranty Policy ng opisyal ni Hesai website: https://www.hesaitech.com/en/legal/warranty
Hesai Technology Co., Ltd.
Telepono: +86 400 805 1233
Website: www.hesaitech.com
Address: Building L2, Hongqiao World Center, Shanghai, China
Email ng Negosyo: info@hesaitech.com
Email ng Serbisyo: service@hesaitech.com